- Общие методы защиты от помех

Содержание
- 2. Теоретические основы радиолокации ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Принятая реализация при отсутствии внешних помех записывается
- 3. Теоретические основы радиолокации ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ По способу создания помехи делятся на активные
- 4. Теоретические основы радиолокации Общие методы защиты от помех С точки зрения воздействия активных помех на системы
- 5. Различия между сигналом и помехой которые могут быть использованы в целях защиты РЛС от активных помех:
- 6. Методы защиты от активных помех Перестройка несущей частоты – при реализации этого метода защиты РЛС от
- 7. Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на выходе фильтра отношение мощности
- 8. ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Методы защиты от пассивных маскирующих помех 1. Распределенный характер мешающих
- 9. Основные различия сигналов целей и пассивных маскирующих помех 3. Различия в скорости перемещения мешающих отражателей и
- 10. Теоретические основы радиолокации Основным признаком, по которому отличаются движущиеся и неподвижные объекты, является различная величина доплеровского
- 11. ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ Различают несколько видов обеспечения когерентности колебаний. Истинная внутренняя когерентность достигается
- 12. 1. Схема РЛС, работающей когерентно-импульсным методом Когерентно-импульсный метод радиолокации 2. Фазовые соотношения между когерентным напряжением и
- 13. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Когерентно-импульсный метод радиолокации заключается в следующем. РЛС через определенные
- 14. Теоретические основы радиолокации Когерентно-импульсный метод радиолокации При радиальном (относительно РЛС) перемещении цели непрерывно изменяется расстояние между
- 15. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Облака движущиеся под действием ветра, дают некоторое (небольшое) доплеровское
- 16. Метод череспериодной компенсации Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов от движущихся целей непрерывно
- 17. Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки. Каждый эхо-сигнал, задержанный на время,
- 18. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Одним из основных недостатков когерентно-импульсного метода являются так называемые
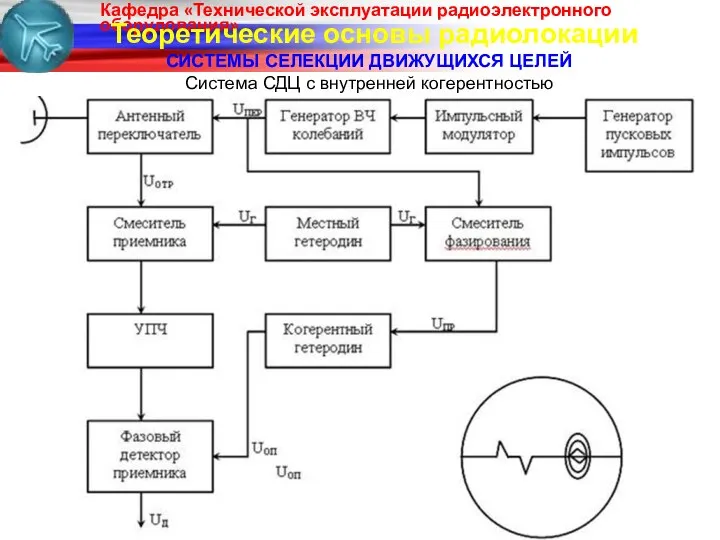
- 19. Теоретические основы радиолокации СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ Система СДЦ с внутренней когерентностью
- 21. Скачать презентацию
Теоретические основы радиолокации
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Принятая реализация при отсутствии
Теоретические основы радиолокации
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Принятая реализация при отсутствии
Теоретические основы радиолокации
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
По способу создания помехи
Теоретические основы радиолокации
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
По способу создания помехи

Теоретические основы радиолокации
Общие методы защиты от помех
С точки зрения воздействия активных
Теоретические основы радиолокации
Общие методы защиты от помех
С точки зрения воздействия активных
Различия между сигналом и помехой которые могут быть использованы в целях
Различия между сигналом и помехой которые могут быть использованы в целях
Методы защиты от активных помех
Перестройка несущей частоты – при реализации этого
Методы защиты от активных помех
Перестройка несущей частоты – при реализации этого
Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на
Оптимальная фильтрация – сводится к построению передаточной функции фильтра, при которой на

ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Методы защиты от пассивных маскирующих помех
1.
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Методы защиты от пассивных маскирующих помех
1.

Основные различия сигналов целей и пассивных маскирующих помех
3. Различия в скорости
Основные различия сигналов целей и пассивных маскирующих помех
3. Различия в скорости
Теоретические основы радиолокации
Основным признаком, по которому отличаются движущиеся и неподвижные объекты,
Теоретические основы радиолокации
Основным признаком, по которому отличаются движущиеся и неподвижные объекты,
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Различают несколько видов обеспечения когерентности колебаний.
Истинная
ПОМЕХИ РАДИОЛОКАЦИОННОМУ НАБЛЮДЕНИЮИ БОРЬБА С НИМИ
Различают несколько видов обеспечения когерентности колебаний.
Истинная

1. Схема РЛС, работающей когерентно-импульсным методом
Когерентно-импульсный метод радиолокации
2. Фазовые соотношения
1. Схема РЛС, работающей когерентно-импульсным методом
Когерентно-импульсный метод радиолокации
2. Фазовые соотношения
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Когерентно-импульсный метод радиолокации заключается в
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Когерентно-импульсный метод радиолокации заключается в

Теоретические основы радиолокации
Когерентно-импульсный метод радиолокации
При радиальном (относительно РЛС) перемещении цели непрерывно
Теоретические основы радиолокации
Когерентно-импульсный метод радиолокации
При радиальном (относительно РЛС) перемещении цели непрерывно

Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Облака движущиеся под действием ветра,
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Облака движущиеся под действием ветра,

Метод череспериодной компенсации
Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов
Метод череспериодной компенсации
Тот факт, что на выходе когерентно-импульсного устройства амплитуда видеоимпульсов

Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки.
Выходные импульсы фазового детектора поступают на схему вычитания и схему задержки.

Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Одним из основных недостатков когерентно-импульсного
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Одним из основных недостатков когерентно-импульсного
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
Теоретические основы радиолокации
СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
Система СДЦ с внутренней когерентностью
 Птица счастья
Птица счастья The News by Tanchik Daria
The News by Tanchik Daria Презентация "Карл Брюллов" - скачать презентации по МХК
Презентация "Карл Брюллов" - скачать презентации по МХК Профессиональные и жизненные планы. Профессиональная пригодность
Профессиональные и жизненные планы. Профессиональная пригодность Rachunek dla Mamy
Rachunek dla Mamy Історія торгівельної марки АВВ
Історія торгівельної марки АВВ Маммография и рак молочной железы (2)
Маммография и рак молочной железы (2) Уровнемер радарный волноводный ЛУЧ-3-01. Характеристики
Уровнемер радарный волноводный ЛУЧ-3-01. Характеристики Технические характеристики тяговых двигателей
Технические характеристики тяговых двигателей Подпорные стенки
Подпорные стенки «Готов к труду и обороне» (ГТО)
«Готов к труду и обороне» (ГТО) Составление рабочей программы по физике для 9 класса. Вебинар
Составление рабочей программы по физике для 9 класса. Вебинар Презентация "Васнецов Виктор Михайлович Портрет" - скачать презентации по МХК
Презентация "Васнецов Виктор Михайлович Портрет" - скачать презентации по МХК ЭЛЕКТРИЧЕСКИЙ ТОК В ГАЗЕ
ЭЛЕКТРИЧЕСКИЙ ТОК В ГАЗЕ Диффузные болезни соединительной ткани
Диффузные болезни соединительной ткани  Морфологиялық тұтастық белгісі
Морфологиялық тұтастық белгісі Презентация Наука в современном обществе
Презентация Наука в современном обществе Типология власти
Типология власти Описательные исследования
Описательные исследования  Классный час «Здоровый ребёнок в здоровой семье» Хвастунова Т.Ф.
Классный час «Здоровый ребёнок в здоровой семье» Хвастунова Т.Ф.  The Presentation of Jesus Christ in the Temple
The Presentation of Jesus Christ in the Temple Отношение к животным как проблема нравственности
Отношение к животным как проблема нравственности Политическая сфера
Политическая сфера нарисуем АНЮТИНЫ ГЛАЗКИ - презентация для начальной школы
нарисуем АНЮТИНЫ ГЛАЗКИ - презентация для начальной школы Современная российская геополитика
Современная российская геополитика Задачи государственной статистики России.
Задачи государственной статистики России. Окончание предварительного расследования
Окончание предварительного расследования Презентация Мясо и мясные продукты
Презентация Мясо и мясные продукты