- Промышленные роботы (манипуляторы)

Содержание
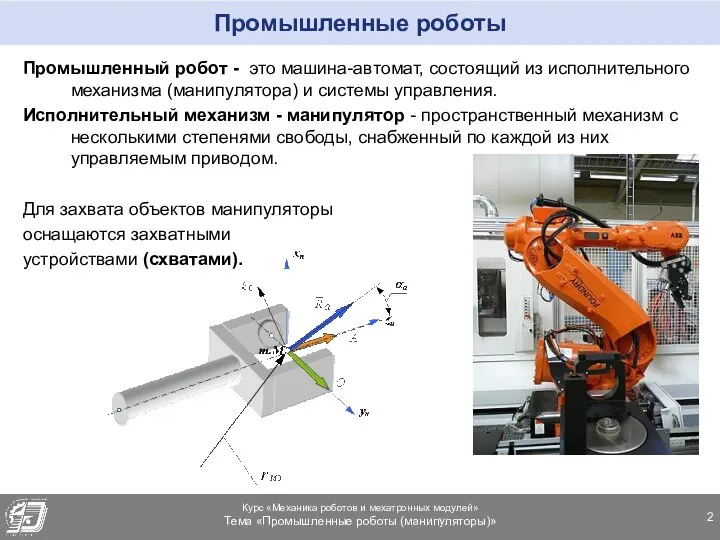
- 2. Промышленные роботы Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора) и системы управления. Исполнительный
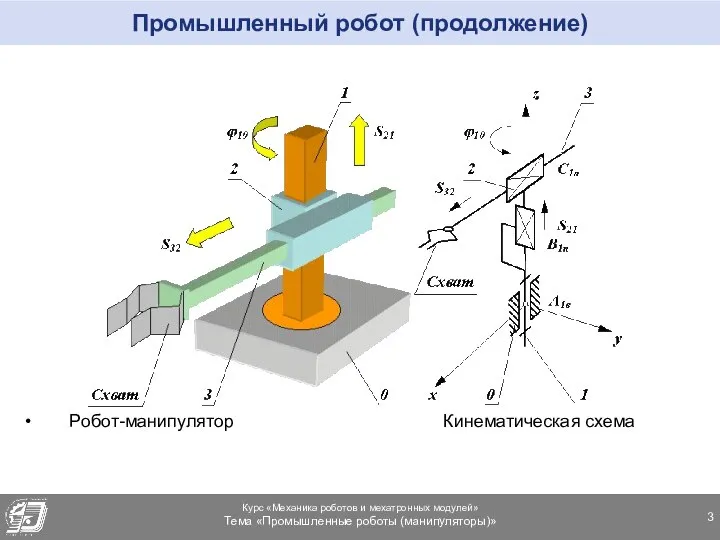
- 3. Промышленный робот (продолжение) Робот-манипулятор Кинематическая схема
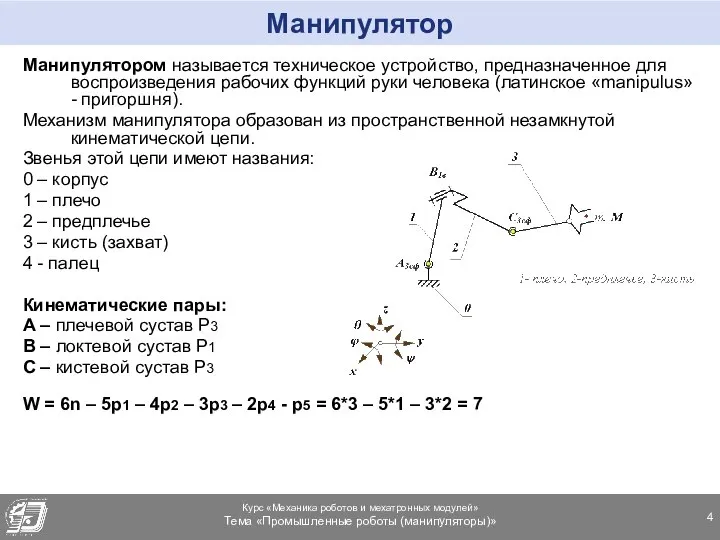
- 4. Манипулятор Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека (латинское «manipulus» - пригоршня).
- 5. Назначение и область применения роботов Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных
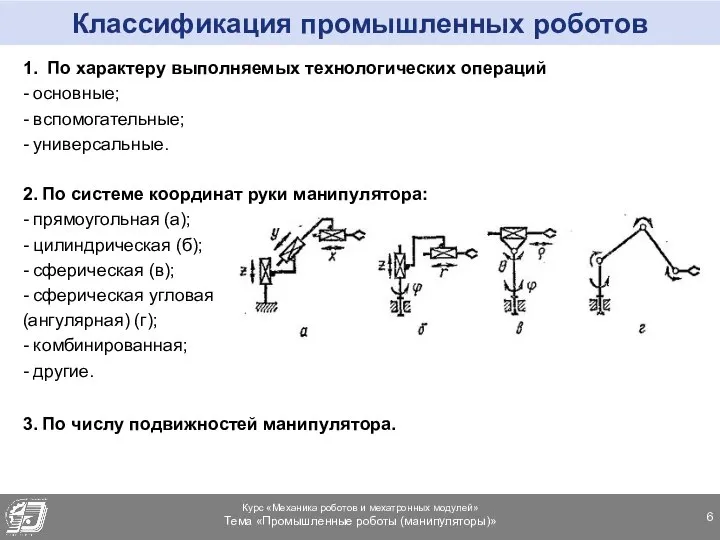
- 6. Классификация промышленных роботов 1. По характеру выполняемых технологических операций - основные; - вспомогательные; - универсальные. 2.
- 7. Классификация промышленных роботов (продолжение) 4. По виду производства: - литейные; - сварочные; - кузнечно-прессовые; - для
- 8. Классификация промышленных роботов (продолжение) 7. По типу силового привода: - электромеханический; - пневматический; - гидравлический; комбинированный.
- 9. Классификация кинематических структурных схем манипуляторов 1 – ВВВ, три вращательных КП; 2 – ВВП, две вращательных
- 10. Управление манипуляторами Функциональная схема ПР
- 11. Робототехнический комплекс (РТК) РТК – автономно действующее средство производства, состоящее из одной или группы единиц производственного
- 12. Робототехнический комплекс (продолжение) РТК – это наиболее эффективное средство решения задач комплексной автоматизации, работающее по принципу
- 13. Автоматизация производства Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства и математические методы с
- 14. Автоматизированная система управления производством
- 15. История робототехники Термину «робот» в 2011 году исполнилось 90 лет. Это широко использующееся сейчас слово впервые
- 16. Поколения промышленных роботов Манипуляторы с автоматическим управлением называются промышленными роботами. ПР по степени совершенства принято делить
- 17. Поколения промышленных роботов (продолжение) Роботы 2-го поколения – устройства, приспособленные к изменяющейся внешней обстановке и не
- 18. Поколения промышленных роботов (продолжение) Роботы 3-го поколения способны выбирать способ движения в зависимости от окружающей обстановки
- 19. Интеллектуальные роботы Персоналии Павловский Владимир Евгеньевич Доктор физико-математических наук Институт прикладной математики им. М.В. Келдыша РАН,
- 20. Промышленные роботы ABB Robotics Робот IRB 2400
- 21. Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH) Основные элементы робота Общий вид
- 22. Научно-технические проблемы создания и совершенствования робототехнических систем Основное требование, предъявляемое к роботам - качественное выполнение двигательных
- 23. Заключение Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и системы управления (позволяющей перепрограммировать
- 25. Скачать презентацию
Промышленные роботы
Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора)
Промышленные роботы
Промышленный робот - это машина-автомат, состоящий из исполнительного механизма (манипулятора)
Промышленный робот (продолжение)
Робот-манипулятор Кинематическая схема
Промышленный робот (продолжение)
Робот-манипулятор Кинематическая схема
Манипулятор
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека
Манипулятор
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека

Назначение и область применения роботов
Промышленные роботы предназначены для замены человека при
Назначение и область применения роботов
Промышленные роботы предназначены для замены человека при
Классификация промышленных роботов
1. По характеру выполняемых технологических операций
- основные;
-
Классификация промышленных роботов
1. По характеру выполняемых технологических операций
- основные;
-
Классификация промышленных роботов (продолжение)
4. По виду производства:
- литейные;
- сварочные;
- кузнечно-прессовые;
-
Классификация промышленных роботов (продолжение)
4. По виду производства:
- литейные;
- сварочные;
- кузнечно-прессовые;
-
Классификация промышленных роботов (продолжение)
7. По типу силового привода:
- электромеханический;
-
Классификация промышленных роботов (продолжение)
7. По типу силового привода:
- электромеханический;
-
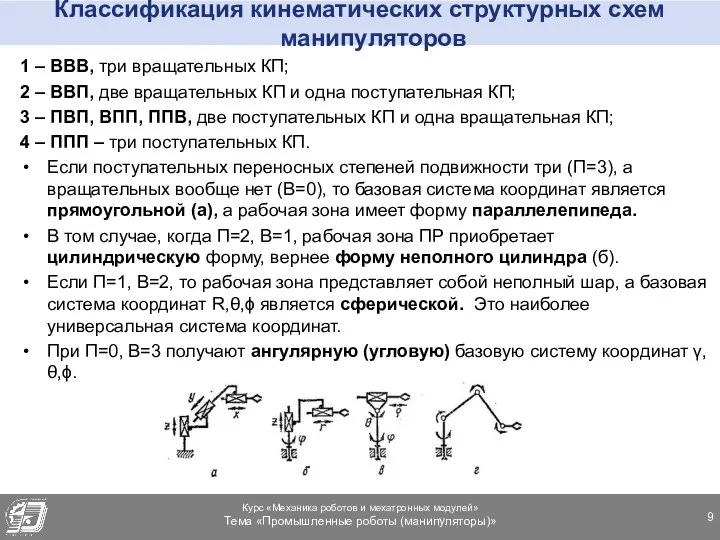
Классификация кинематических структурных схем манипуляторов
1 – ВВВ, три вращательных КП;
2
Классификация кинематических структурных схем манипуляторов
1 – ВВВ, три вращательных КП;
2
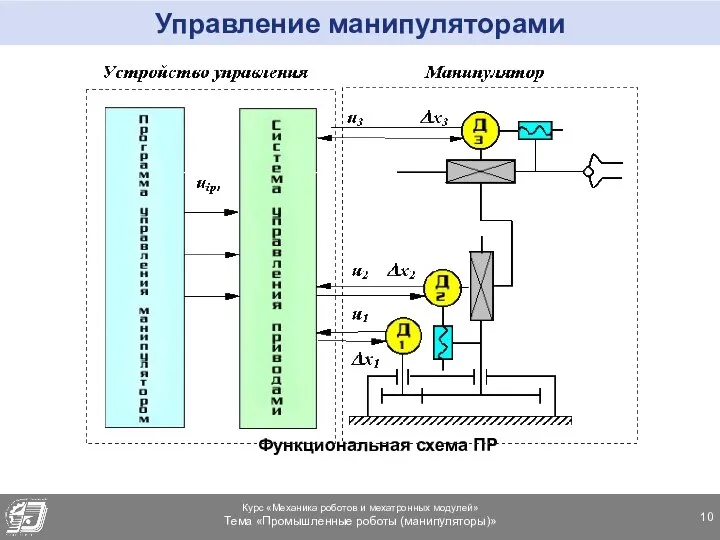
Управление манипуляторами
Функциональная схема ПР
Управление манипуляторами
Функциональная схема ПР

Робототехнический комплекс (РТК)
РТК – автономно действующее средство производства, состоящее из одной
Робототехнический комплекс (РТК)
РТК – автономно действующее средство производства, состоящее из одной

Робототехнический комплекс (продолжение)
РТК – это наиболее эффективное средство решения задач комплексной
Робототехнический комплекс (продолжение)
РТК – это наиболее эффективное средство решения задач комплексной

Автоматизация производства
Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства
Автоматизация производства
Автоматизация – одно из направлений научно-технического прогресса, использующие технические средства

Автоматизированная система управления производством
Автоматизированная система управления производством
История робототехники
Термину «робот» в 2011 году исполнилось 90 лет.
Это широко использующееся
История робототехники
Термину «робот» в 2011 году исполнилось 90 лет.
Это широко использующееся

Поколения промышленных роботов
Манипуляторы с автоматическим управлением называются промышленными роботами.
ПР по степени
Поколения промышленных роботов
Манипуляторы с автоматическим управлением называются промышленными роботами.
ПР по степени

Поколения промышленных роботов (продолжение)
Роботы 2-го поколения – устройства, приспособленные к изменяющейся
Поколения промышленных роботов (продолжение)
Роботы 2-го поколения – устройства, приспособленные к изменяющейся
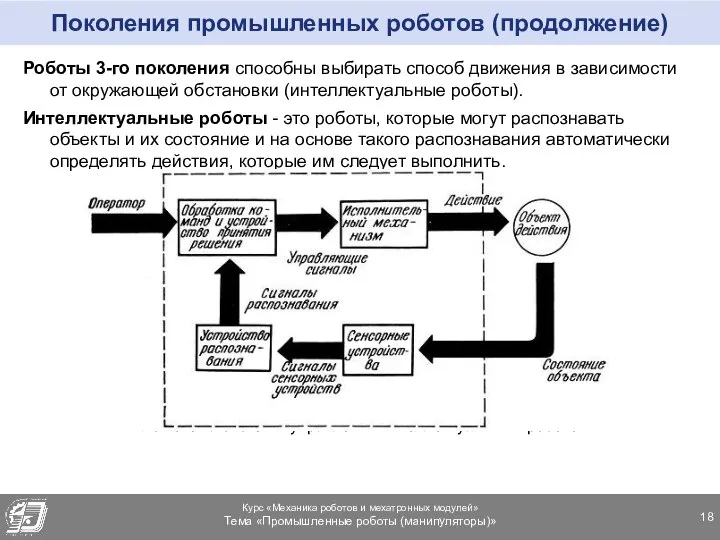
Поколения промышленных роботов (продолжение)
Роботы 3-го поколения способны выбирать способ движения в
Поколения промышленных роботов (продолжение)
Роботы 3-го поколения способны выбирать способ движения в

Интеллектуальные роботы
Персоналии
Павловский Владимир Евгеньевич
Доктор физико-математических наук
Институт прикладной математики
им. М.В. Келдыша РАН,
Интеллектуальные роботы
Персоналии
Павловский Владимир Евгеньевич
Доктор физико-математических наук
Институт прикладной математики
им. М.В. Келдыша РАН,

Промышленные роботы ABB Robotics
Робот IRB 2400
Промышленные роботы ABB Robotics
Робот IRB 2400
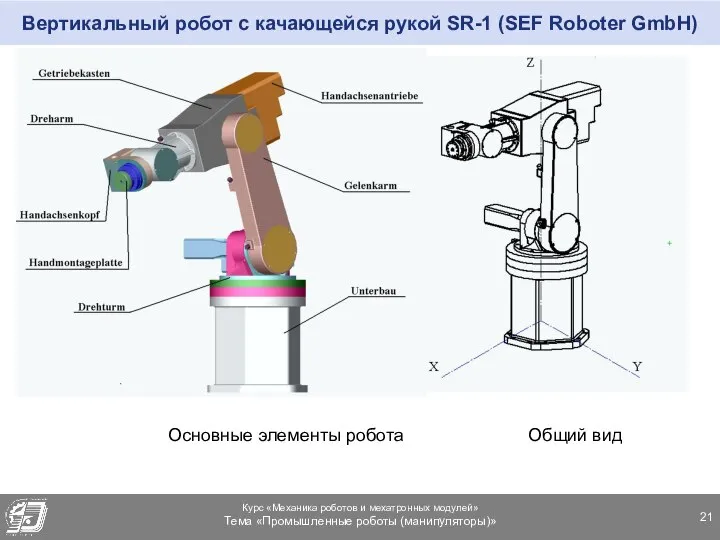
Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH)
Основные элементы робота
Вертикальный робот с качающейся рукой SR-1 (SEF Roboter GmbH)
Основные элементы робота
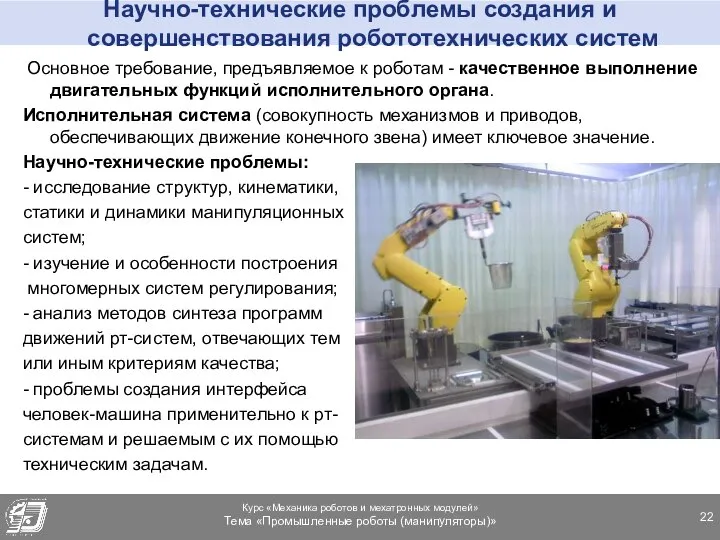
Научно-технические проблемы создания и совершенствования робототехнических систем
Основное требование, предъявляемое к
Научно-технические проблемы создания и совершенствования робототехнических систем
Основное требование, предъявляемое к
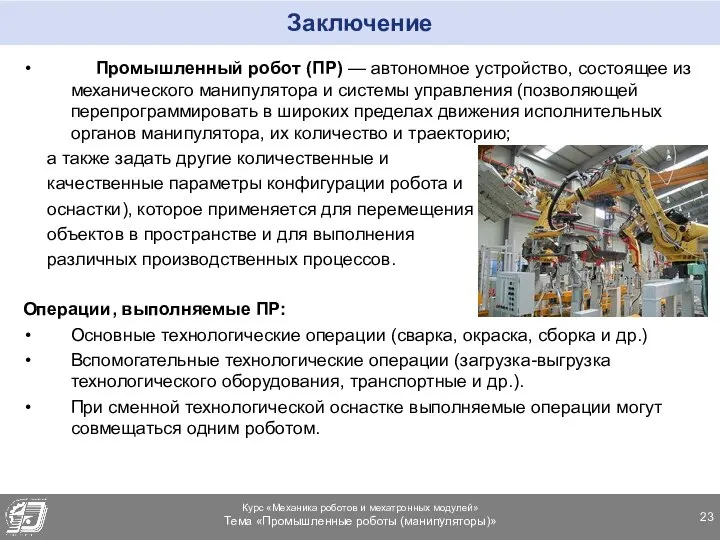
Заключение
Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и
Заключение
Промышленный робот (ПР) — автономное устройство, состоящее из механического манипулятора и
 История развития прыжков в воду
История развития прыжков в воду Формирование структуры сайта. (Тема 8)
Формирование структуры сайта. (Тема 8) Опис котеджу villa-ilona
Опис котеджу villa-ilona Әдебиет әлемінде
Әдебиет әлемінде  Элементы компьютерной математики. (Лекция 7)
Элементы компьютерной математики. (Лекция 7) Возникновение и основные черты мусульманского права
Возникновение и основные черты мусульманского права ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ВЕРОЯТНОСТЕЙ И СТАТИСТИКИ Теория вероятностей, 9 класс Учитель математики ГБОУ СОШ № 737 – Крапивина Све
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ВЕРОЯТНОСТЕЙ И СТАТИСТИКИ Теория вероятностей, 9 класс Учитель математики ГБОУ СОШ № 737 – Крапивина Све Физкультминутка для школьников средних и старших классов .
Физкультминутка для школьников средних и старших классов . Костюм и орнамент Московской Руси
Костюм и орнамент Московской Руси  Лучшая команда. Какая она?
Лучшая команда. Какая она? Рождество по-французски
Рождество по-французски PR как метод формирования позитивного имиджа предприятия в сфере ВЭД
PR как метод формирования позитивного имиджа предприятия в сфере ВЭД Правила игры в баскетбол
Правила игры в баскетбол Осознанность на духовном пути. Цели, которые мы ставим
Осознанность на духовном пути. Цели, которые мы ставим Стандарты и технические регламенты в отрасли инфокоммуникаций
Стандарты и технические регламенты в отрасли инфокоммуникаций Презентация на тему "ФУНКЦИОНАЛЬНАЯ СИСТЕМА ВЫДЕЛЕНИЯ" - скачать презентации по Медицине
Презентация на тему "ФУНКЦИОНАЛЬНАЯ СИСТЕМА ВЫДЕЛЕНИЯ" - скачать презентации по Медицине Распределение обязанностей продавца и покупателя в соответствии с ИНКОТЕРМС 2010
Распределение обязанностей продавца и покупателя в соответствии с ИНКОТЕРМС 2010 Зміст уроків фізичної культури з використанням засобів аеробіки
Зміст уроків фізичної культури з використанням засобів аеробіки Сетевая инфраструктура Azure
Сетевая инфраструктура Azure Информация для курсантов 1 курса Транспортного колледжа
Информация для курсантов 1 курса Транспортного колледжа Языковые контакты
Языковые контакты Дополнительные технологии интеллектуализации ГИС
Дополнительные технологии интеллектуализации ГИС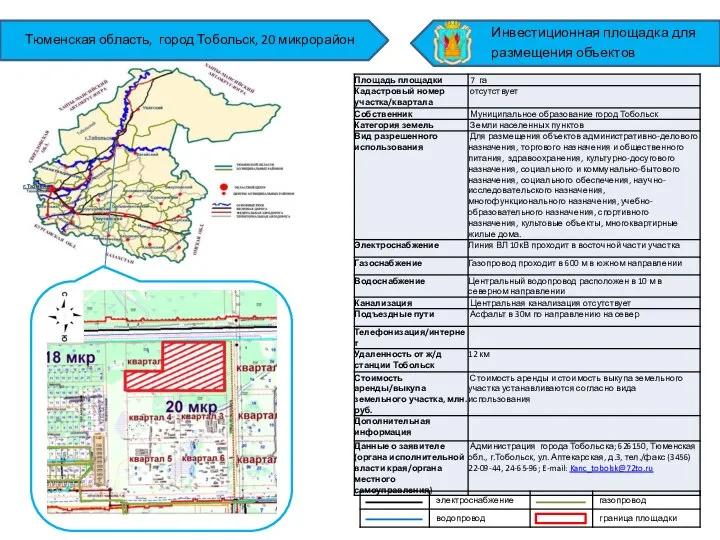 Инвестиционная площадка для размещения объектов Тюменская область, город Тобольск, 20 микрорайон
Инвестиционная площадка для размещения объектов Тюменская область, город Тобольск, 20 микрорайон Урок алгебры в 9 классе
Урок алгебры в 9 классе 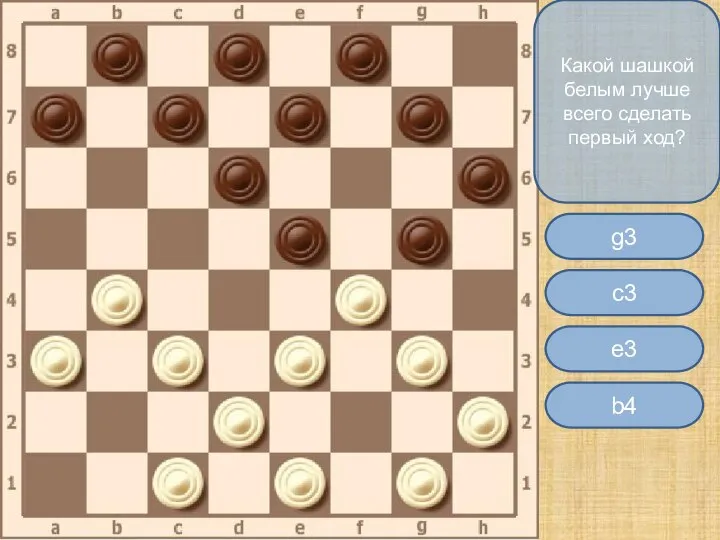 Тест по простым комбинациям в игре шашки
Тест по простым комбинациям в игре шашки Презентация на тему "О типичных нарушениях при организации подготовки к ГИА-2011 и проведении ГИА-2010 в общеобразовательных учрежд
Презентация на тему "О типичных нарушениях при организации подготовки к ГИА-2011 и проведении ГИА-2010 в общеобразовательных учрежд „Nie będziesz miał cudzych bogów przede Mną”. Rzecz o pierwszym przykazaniu
„Nie będziesz miał cudzych bogów przede Mną”. Rzecz o pierwszym przykazaniu Introduction to Fenwick tree
Introduction to Fenwick tree