- Структурная формула для плоского и пространственного механизма

Содержание
- 2. Структурная формула плоских механизмов f – степень подвижности механизма, которая определяется числом независимых параметров, которое необходимо
- 3. Формула определения степени подвижности для механизма: f=3(n-1)-2P5-1P4 n-общее число звеньев; P5 - число пар пятого класса(низших);
- 4. 2) 1-зубчатая шестерня; 2-зубчатое колесо; 3-стойка; II - 2-3 - P5 III -1-2 - P4 I
- 6. Скачать презентацию
Структурная формула плоских механизмов
f – степень подвижности механизма, которая определяется числом
Структурная формула плоских механизмов
f – степень подвижности механизма, которая определяется числом
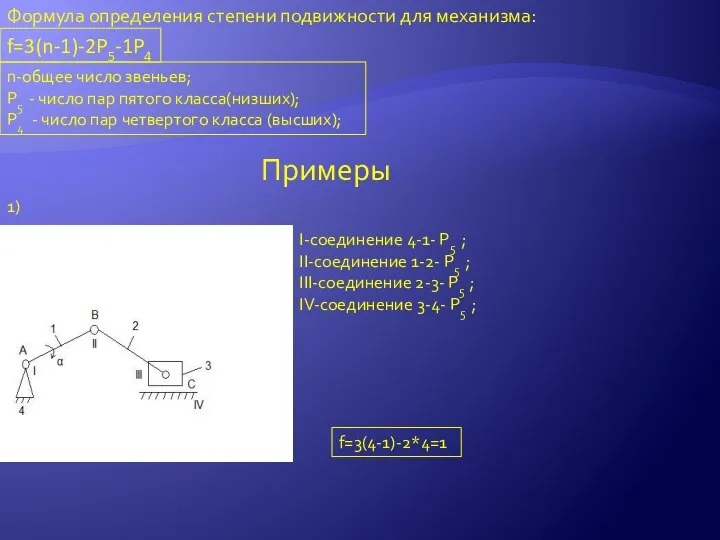
Формула определения степени подвижности для механизма:
f=3(n-1)-2P5-1P4
n-общее число звеньев;
P5 - число пар
Формула определения степени подвижности для механизма:
f=3(n-1)-2P5-1P4
n-общее число звеньев;
P5 - число пар
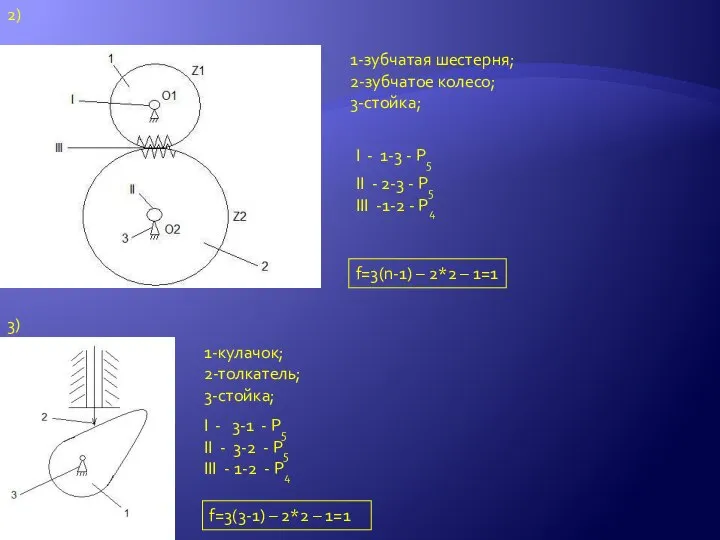
2)
1-зубчатая шестерня;
2-зубчатое колесо;
3-стойка;
II - 2-3 - P5
III -1-2 - P4
I -
2)
1-зубчатая шестерня;
2-зубчатое колесо;
3-стойка;
II - 2-3 - P5
III -1-2 - P4
I -
 Презентация на тему "Тесты на собеседовании" - скачать презентации по Педагогике
Презентация на тему "Тесты на собеседовании" - скачать презентации по Педагогике Использование технологии критического мышления в начальной школе
Использование технологии критического мышления в начальной школе КОНЦЕПТУАЛЬНЫЕ ОСНОВАНИЯ СОВРЕМЕННОГО ОРГАНИЗАЦИОННОГО РАЗВИТИЯ
КОНЦЕПТУАЛЬНЫЕ ОСНОВАНИЯ СОВРЕМЕННОГО ОРГАНИЗАЦИОННОГО РАЗВИТИЯ Автоматизовані системи управління та зв’язок (практичне заняття № 2.3)
Автоматизовані системи управління та зв’язок (практичне заняття № 2.3) Разработка приложений для ОС Android
Разработка приложений для ОС Android Отказ от использования гермоконтейнера
Отказ от использования гермоконтейнера Арморик. Использование перфторана в клинике. Перзентация
Арморик. Использование перфторана в клинике. Перзентация Презентация Эволюция системы. Трансформационная точка
Презентация Эволюция системы. Трансформационная точка Co cię gryzie? Czyli kilka słów o sumieniu
Co cię gryzie? Czyli kilka słów o sumieniu Учебно – исследовательская работа на тему: Семь чудес Калужской области
Учебно – исследовательская работа на тему: Семь чудес Калужской области Фонд поддержки предпринимательства в г. Киров
Фонд поддержки предпринимательства в г. Киров Эволюция естественнонаучной картины мира Выполнила студентка 1 курса Экономического факультета Группы Э101 Овсянникова Надежда
Эволюция естественнонаучной картины мира Выполнила студентка 1 курса Экономического факультета Группы Э101 Овсянникова Надежда ИЗОБРАЗИТЕЛЬНОЕ ИСКУССТВО. СЕМЬЯ ПРОСТРАНСТВЕННЫХ ИСКУССТВ.
ИЗОБРАЗИТЕЛЬНОЕ ИСКУССТВО. СЕМЬЯ ПРОСТРАНСТВЕННЫХ ИСКУССТВ. Воскресная школа при Свято-Троицком храме г. Ирпень
Воскресная школа при Свято-Троицком храме г. Ирпень Лекция 5. Отношения на множестве © Гусева И.Н., кафедра СМиРЯ, КГУ, 2010
Лекция 5. Отношения на множестве © Гусева И.Н., кафедра СМиРЯ, КГУ, 2010 Презентация на тему "Пессимист видит трудность в каждой возможности, оптимист возможность в каждой трудности" - скачать презе
Презентация на тему "Пессимист видит трудность в каждой возможности, оптимист возможность в каждой трудности" - скачать презе анализ наиболее эффективных решений в плане международного торгового сотрудничества в качестве посредника
анализ наиболее эффективных решений в плане международного торгового сотрудничества в качестве посредника Pasg o amgylch y byd
Pasg o amgylch y byd Врачебный контроль в физической культуре
Врачебный контроль в физической культуре Клички и прозвища
Клички и прозвища Конспект занятия Рисование «Гроздья рябины» (старшая группа) Корчикова Т.В. Воспитатель 1 категории МДОУ «Центр развития ребе
Конспект занятия Рисование «Гроздья рябины» (старшая группа) Корчикова Т.В. Воспитатель 1 категории МДОУ «Центр развития ребе периоститы 2015
периоститы 2015 Восстановление автомобильных рам и подвесок
Восстановление автомобильных рам и подвесок Организация бивака (выбор места, виды работ, обеспечение безопасности)
Организация бивака (выбор места, виды работ, обеспечение безопасности) Управление в обществе с ограниченной ответственностью Выполнила студентка 2го курса юридического факультета Червона Алена
Управление в обществе с ограниченной ответственностью Выполнила студентка 2го курса юридического факультета Червона Алена  Главное в 7 номере журнала «Справочник кадровика»
Главное в 7 номере журнала «Справочник кадровика» Экономика и экономическая наука.
Экономика и экономическая наука.  Презентация "Экономика. Деньги" - скачать презентации по Экономике
Презентация "Экономика. Деньги" - скачать презентации по Экономике