- Т12 РЛПК.ppt

Содержание
- 2. * Загальна характеристика РЛПК. Робота РЛПК при огляді повітряного простору. Робота РЛПК при супроводженні повітряної цілі.
- 3. Контрольні завдання (РЛПК) Оцініть можливий інтервал однозначно вимірюємих дальностей (імпульсним методом) і швидкостей (доплерівським методом) при
- 4. * Загальна характеристика РЛПК Призначення, склад і ТТХ комплексу Призначення РЛПК 27 і РЛПК-29. Пошук, виявлення,
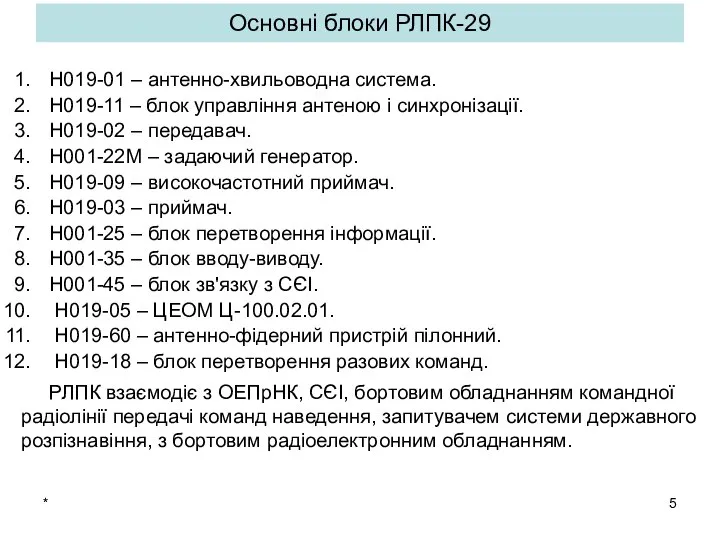
- 5. * Основні блоки РЛПК-29 Н019-01 – антенно-хвильоводна система. Н019-11 – блок управління антеною і синхронізації. Н019-02
- 6. * Основні тактичні характеристики РЛПК-29 Дальність виявлення (DB) цілі з ЕПР 3 м2 при ймовірності правильного
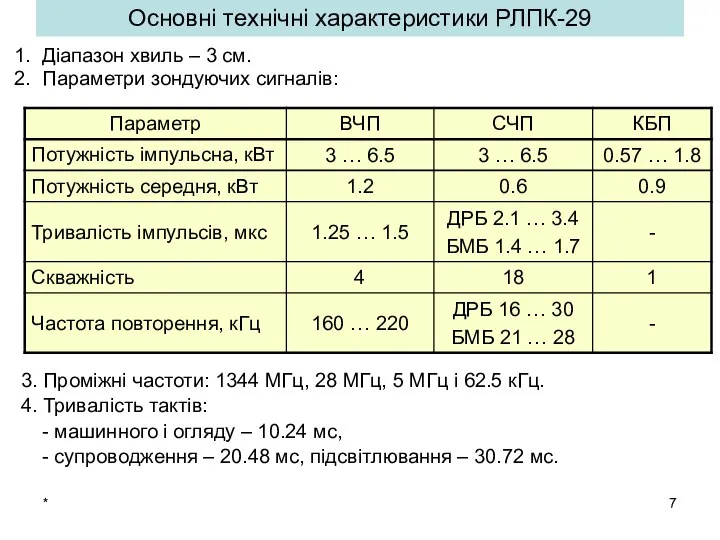
- 7. * Основні технічні характеристики РЛПК-29 Діапазон хвиль – 3 см. Параметри зондуючих сигналів: 3. Проміжні частоти:
- 8. * 5. Чутливість приймача: - в режимі ДРБ при ВЧП -161 дБ/Вт, при СЧП -145 дБ/Вт,
- 9. * Принципи побудови і роботи РЛПК Структурна схема РЛПК-29
- 10. * АСДР – антена системи державного розпізнавання, АКК – антена каналу компенсації, АКО – антена каналу
- 11. Робота РЛПК-29 в процесі огляду і пошуку цілей Тривалість такту при огляді ТТ=10.24 мс. Протягом службової
- 12. * Антена основного каналу двохдзеркальна з поворотом площини поляризації на 90О. Опромінювач антени складної конструкції 4-канальний.
- 13. * Опорні когерентні коливання частот fГ1 та fГ2 створюються шляхом перетворення і комбінування частоти опорного генератора
- 14. * Загальна кількість аналогових каналів при ВЧП (2 стр.Д)×(6 УГ)×(4 ФГ)=48, при СЧП (12 стр.Д)×(1 УГ)×(4
- 15. * Антенна каналу компенсації (АКК) блоку Н019-01 формує компенсаційну ДСА, орієнтовану на підстилаючу поверхню. Сигнал з
- 16. Робота РЛПК-29 при супроводженні цілі по координатам Тривалість такту при супроводженні обраної для атаки цілі ТТ=20.48
- 17. * Супроводження по дальності. Інформація для супроводження цілі по дальності (затримка відбитих сигналів) міститься в сигналі
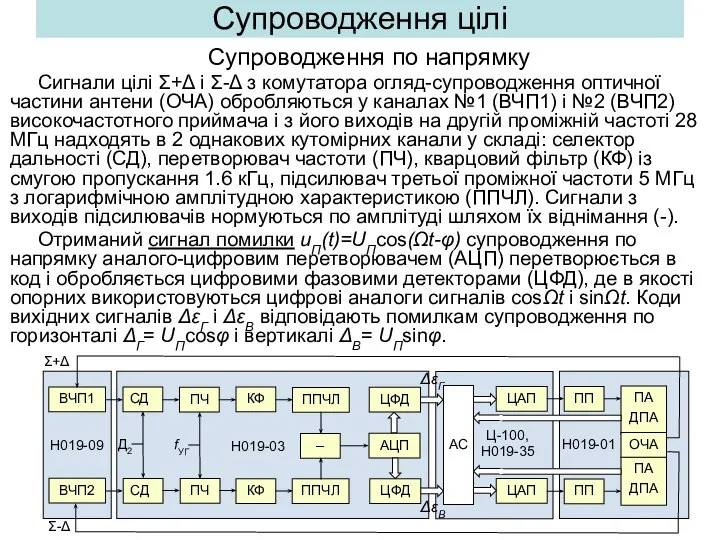
- 18. * Супроводження по напрямку. Випромінювання зондуючих сигналів здійснюється сумарною ДСА Σ. Привід антени (ПА) управляючими напругами
- 19. * Підсилені сигнали Σ+Δ і Σ-Δ обробляються в кутомірних каналах приймача кутомірно-дальномірного (ПрмКД) з логарифмічними амплітудними
- 20. * Конструкція і принципи побудови РЛПК В РЛПК реалізовано принцип блочної конструкції. Блоки створені по функціональному
- 21. *
- 22. * Основні режими роботи РЛПК: - огляд повітряного простору для пошуку і виявлення повітряних цілей, грубого
- 23. * Антена Н019-01 Антена РЛС двохдзеркальна з поворотом площини поляризації. Параболічне дзеркало опромінюється хвилею з вертикальною
- 24. * Параболічне дзеркало з чотирьохканальним опромінювачем формує чотири ДСА, симетрично зміщені відносно осі антени (коричневі). Шляхом
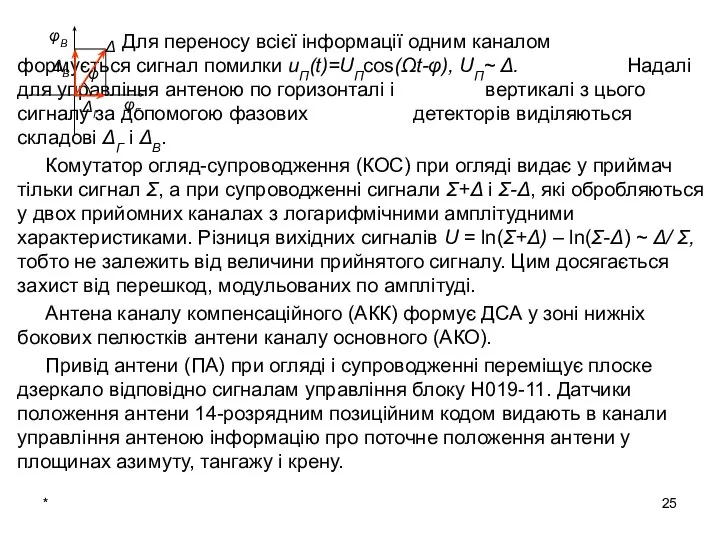
- 25. * Для переносу всієї інформації одним каналом формується сигнал помилки uП(t)=UПcos(Ωt-φ), UП~ Δ. Надалі для управління
- 26. * Задаючий генератор Н001-22М і підсилювач потужності Н019-02 Когерентний режим роботи РЛС забезпечується тим, що всі
- 27. * Відповідно потрібному режиму зондування формувач гетеродинних частот (ФГЧ) видає в АФМ: 1) сигнал постійної частоти
- 28. * Синхронізатор блоку Н019-11 Часовий графік роботи РЛС і РЛПК в цілому та спряжених з ними
- 29. * Високочастотний приймач Н019-09 Трьохканальний високочастотний приймач Н019-09 здійснює: попередню селекцію і підсилення вхідних сигналів робочої
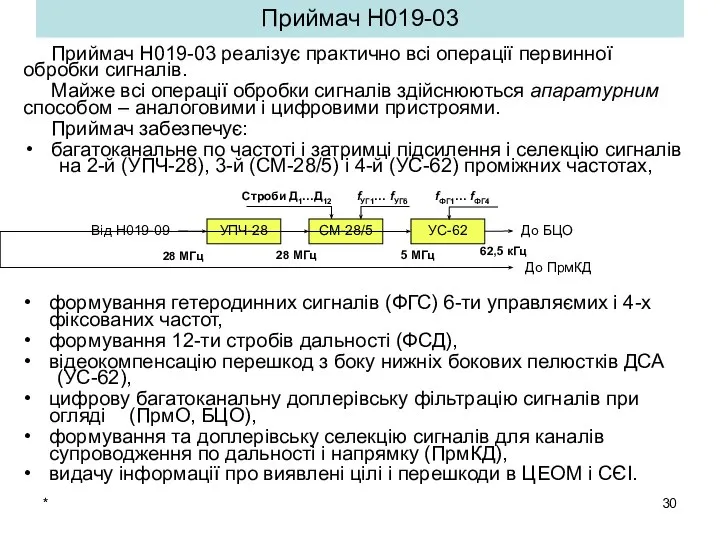
- 30. * Приймач Н019-03 Приймач Н019-03 реалізує практично всі операції первинної обробки сигналів. Майже всі операції обробки
- 31. * З трьохканального приймача Н019-09 в приймач Н019-03 надходять сигнали другої проміжної частоти 28 МГц. При
- 32. * При супроводженні однієї цілі по координатам: 4 канали підключені до виходу каналу №1 Н019-09, використовуються
- 33. * Приймачі оглядовий ПрмО і кутомірно-дальномірний ПрмКД ПрмО з 24 пар каналів здійснює перетворення сигналів 3-ї
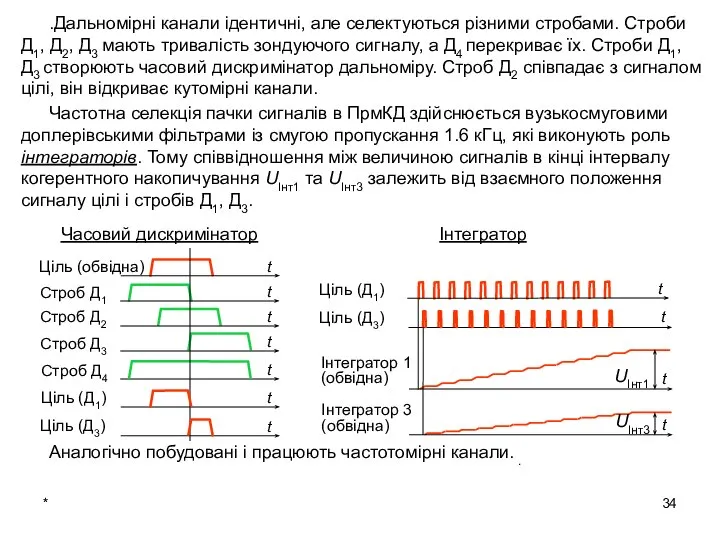
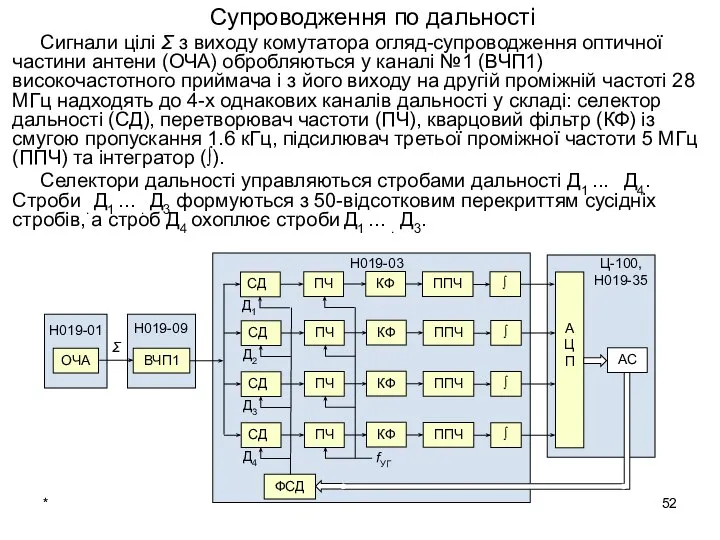
- 34. * .Дальномірні канали ідентичні, але селектуються різними стробами. Строби Д1, Д2, Д3 мають тривалість зондуючого сигналу,
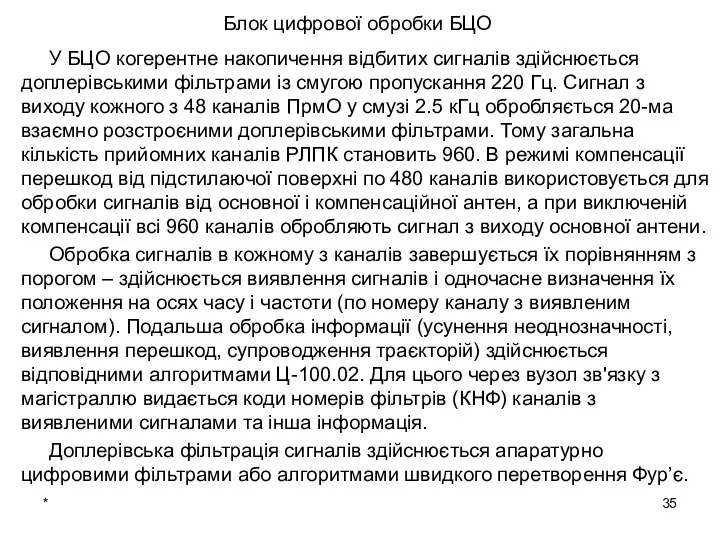
- 35. * Блок цифрової обробки БЦО У БЦО когерентне накопичення відбитих сигналів здійснюється доплерівськими фільтрами із смугою
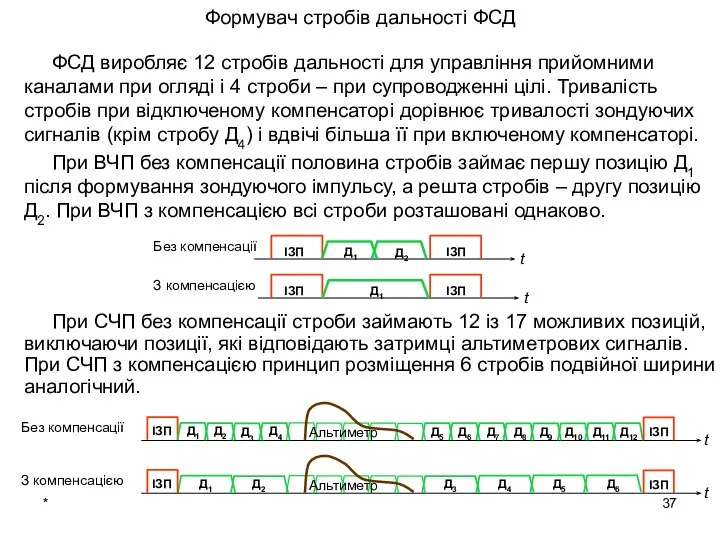
- 36. * Формувачі гетеродинних сигналів ФГС ФГС в режимі ВЧП виробляє 6 когерентних управляємих по частоті сигналів
- 37. * При СЧП без компенсації строби займають 12 із 17 можливих позицій, виключаючи позиції, які відповідають
- 38. Автоматичне наведення Тривалість такту пошуку і виявлення цілей 10.24 мс. Впродовж 4.8 мс такту по інформації
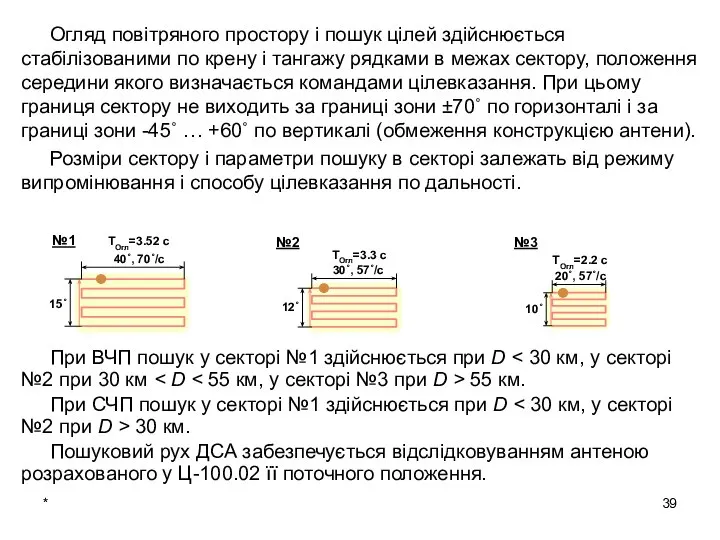
- 39. * Огляд повітряного простору і пошук цілей здійснюється стабілізованими по крену і тангажу рядками в межах
- 40. * Режим випромінювання (ВЧП чи СЧП) визначається разовою командою “ППС” (ВЧП) або “ЗПС” (СЧП) з пункту
- 41. * Ручне наведення Тривалість такту пошуку і виявлення цілей 10.24 мс. Управління сектором пошуку здійснюється вручну
- 42. * Визначення координат цілей Кутові координати φГ та φВ виявленої цілі визначаються по положенню ДСА на
- 43. * Розпізнавання державної приналежності цілей Після виявлення і визначення координат цілі Ц-100.02 в запитувач СРЗ-2П видає
- 44. * Супроводження цілей методом “на проході” Зав'язування траєкторії здійснюється по першому контакту - починається екстраполяція і
- 45. * Для переходу до супроводження цілі з режиму огляду необхідно: - перевести антену в положення, при
- 46. Пошук цілі у вказаному напрямку По команді на захоплення цілі ДСА антени припиняє огляд і найкоротшим
- 47. Перехід до супроводження цілі 1 етап ВУГ (такти ВУГ - 18 тактів впродовж не більше 2
- 48. В момент t2 строб Д1 досягає зони непрозорості в межах ІЗП4. Щоб і надалі утримати сигнал
- 49. * Супроводження цілі Супроводження по напрямку Сигнали цілі Σ+Δ і Σ-Δ з комутатора огляд-супроводження оптичної частини
- 50. * Коди помилок ΔεГ і ΔεВ обробляються алгоритмом супроводження (АС) Ц-100.02 на основі α-β фільтру: ε[n]
- 51. * Супроводження по швидкості Канал супроводження по швидкості використовує частину одного з кутомірних каналів з лінійною
- 52. * Супроводження по дальності Сигнали цілі Σ з виходу комутатора огляд-супроводження оптичної частини антени (ОЧА) обробляються
- 53. * На перетворювачі частоти всіх каналів з формувача гетеродинних сигналів видається напруга управляємого гетеродину однакової частоти
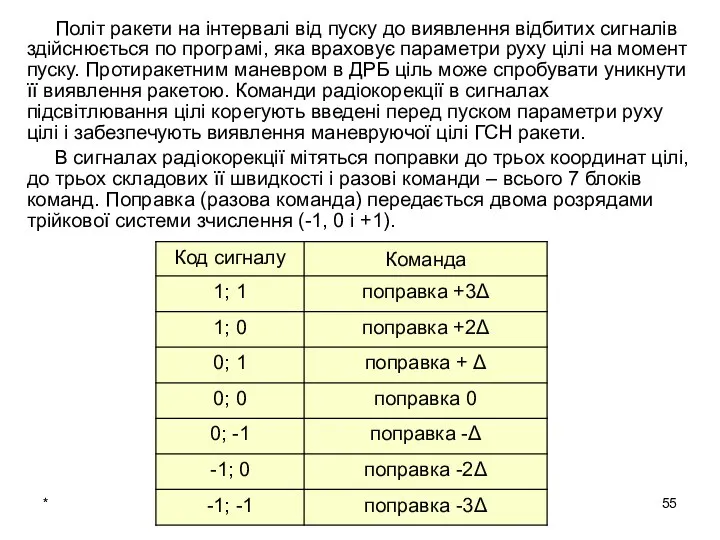
- 54. * Підсвітлювання цілі і передача команд радіокорекції Напівактивна ГСН ракети Р-27Р потребує підсвітлювання цілі когерентним сигналом,
- 55. * Політ ракети на інтервалі від пуску до виявлення відбитих сигналів здійснюється по програмі, яка враховує
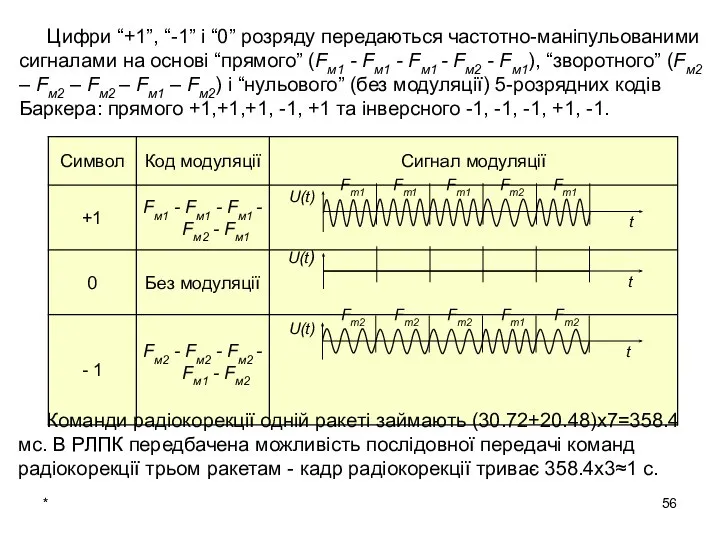
- 56. * Цифри “+1”, “-1” і “0” розряду передаються частотно-маніпульованими сигналами на основі “прямого” (Fм1 - Fм1
- 57. * 4. Застосування РЛПК літаків Міг-29 і Су-27 РЛПК-29 “Рубін” забезпечує: Пошук, виявлення, визначення координат і
- 58. * Режими роботи РЛПК Пошук, виявлення і визначення координат цілей, супроводження “на проході” із продовженням огляду
- 59. * Взаємодія з ОЕПрНК Взаємодія між РЛПК і ОЕПрНК здійснюється при: - встановленні перемикача пульту управління
- 60. * Органи управління СУВ-29 Пульт спеціальних режимів ПСР-31 БАЗА МЕТРИ – введення бази цілі РЕЖ СУВ
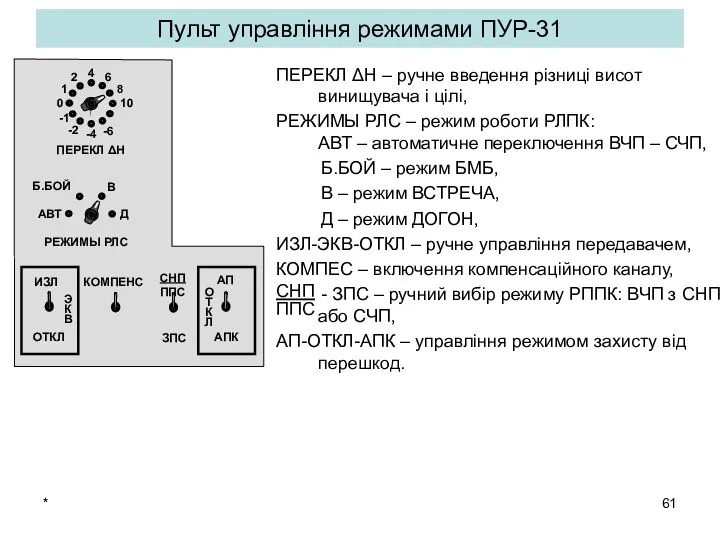
- 61. * Пульт управління режимами ПУР-31 ПЕРЕКЛ ΔН – ручне введення різниці висот винищувача і цілі, РЕЖИМЫ
- 62. * ЗАЗВАТ ЧУЖОЙ-СВОЙ – управління блокуванням атаки своєї цілі, ТОРМОЗ - БЕЗ ТОРМОЗА – управління режимом
- 63. * РЛПК-27 “Меч” забезпечує: Виявлення, визначення координат на проході, захоплення на супроводження повітряних цілей на висотах
- 64. * Режими роботи РЛПК Пошук, виявлення і визначення координат цілей, супроводження “на проході” до 10 цілей
- 65. * Взаємодія з ОЕПС Ручний або автоматичний вибір ведучого каналу залежить від положення перемикачів режимів СУВ,
- 66. * Питання для самоконтролю 1. Призначення, склад і завдання РЛПК-29. 2. Бойове застосування РЛПК-29. 3. Особливості
- 68. Скачать презентацию

*
Загальна характеристика РЛПК.
Робота РЛПК при огляді повітряного простору.
Робота РЛПК при супроводженні
*
Загальна характеристика РЛПК.
Робота РЛПК при огляді повітряного простору.
Робота РЛПК при супроводженні

Контрольні завдання (РЛПК)
Оцініть можливий інтервал однозначно вимірюємих дальностей (імпульсним методом) і
Контрольні завдання (РЛПК)
Оцініть можливий інтервал однозначно вимірюємих дальностей (імпульсним методом) і

*
Загальна характеристика РЛПК
Призначення, склад і ТТХ комплексу
Призначення РЛПК 27 і
*
Загальна характеристика РЛПК
Призначення, склад і ТТХ комплексу
Призначення РЛПК 27 і
*
Основні блоки РЛПК-29
Н019-01 – антенно-хвильоводна система.
Н019-11 – блок управління антеною і
*
Основні блоки РЛПК-29
Н019-01 – антенно-хвильоводна система.
Н019-11 – блок управління антеною і

*
Основні тактичні характеристики РЛПК-29
Дальність виявлення (DB) цілі з ЕПР 3 м2
*
Основні тактичні характеристики РЛПК-29
Дальність виявлення (DB) цілі з ЕПР 3 м2
*
Основні технічні характеристики РЛПК-29
Діапазон хвиль – 3 см.
Параметри зондуючих сигналів:
3. Проміжні
*
Основні технічні характеристики РЛПК-29
Діапазон хвиль – 3 см.
Параметри зондуючих сигналів:
3. Проміжні

*
5. Чутливість приймача:
- в режимі ДРБ при ВЧП -161 дБ/Вт,
*
5. Чутливість приймача:
- в режимі ДРБ при ВЧП -161 дБ/Вт,

*
Принципи побудови і роботи РЛПК
Структурна схема РЛПК-29
*
Принципи побудови і роботи РЛПК
Структурна схема РЛПК-29

*
АСДР – антена системи державного розпізнавання,
АКК – антена каналу компенсації,
АКО –
*
АСДР – антена системи державного розпізнавання,
АКК – антена каналу компенсації,
АКО –

Робота РЛПК-29 в процесі огляду і пошуку цілей
Тривалість такту при огляді
Робота РЛПК-29 в процесі огляду і пошуку цілей
Тривалість такту при огляді

*
Антена основного каналу двохдзеркальна з поворотом площини поляризації на 90О. Опромінювач
*
Антена основного каналу двохдзеркальна з поворотом площини поляризації на 90О. Опромінювач

*
Опорні когерентні коливання частот fГ1 та fГ2 створюються шляхом перетворення і
*
Опорні когерентні коливання частот fГ1 та fГ2 створюються шляхом перетворення і
*
Загальна кількість аналогових каналів при ВЧП (2 стр.Д)×(6 УГ)×(4 ФГ)=48, при
*
Загальна кількість аналогових каналів при ВЧП (2 стр.Д)×(6 УГ)×(4 ФГ)=48, при

*
Антенна каналу компенсації (АКК) блоку Н019-01 формує компенсаційну ДСА, орієнтовану на
*
Антенна каналу компенсації (АКК) блоку Н019-01 формує компенсаційну ДСА, орієнтовану на
Робота РЛПК-29 при супроводженні цілі по координатам
Тривалість такту при супроводженні обраної
Робота РЛПК-29 при супроводженні цілі по координатам
Тривалість такту при супроводженні обраної

*
Супроводження по дальності.
Інформація для супроводження цілі по дальності (затримка відбитих сигналів)
*
Супроводження по дальності.
Інформація для супроводження цілі по дальності (затримка відбитих сигналів)
*
Супроводження по напрямку.
Випромінювання зондуючих сигналів здійснюється сумарною ДСА Σ. Привід антени
*
Супроводження по напрямку.
Випромінювання зондуючих сигналів здійснюється сумарною ДСА Σ. Привід антени

*
Підсилені сигнали Σ+Δ і Σ-Δ обробляються в кутомірних каналах приймача кутомірно-дальномірного
*
Підсилені сигнали Σ+Δ і Σ-Δ обробляються в кутомірних каналах приймача кутомірно-дальномірного

*
Конструкція і принципи побудови РЛПК
В РЛПК реалізовано принцип блочної конструкції. Блоки
*
Конструкція і принципи побудови РЛПК
В РЛПК реалізовано принцип блочної конструкції. Блоки

*
*

*
Основні режими роботи РЛПК:
- огляд повітряного простору для пошуку і
*
Основні режими роботи РЛПК:
- огляд повітряного простору для пошуку і

*
Антена Н019-01
Антена РЛС двохдзеркальна з поворотом площини поляризації. Параболічне дзеркало
*
Антена Н019-01
Антена РЛС двохдзеркальна з поворотом площини поляризації. Параболічне дзеркало

*
Параболічне дзеркало з чотирьохканальним опромінювачем формує чотири ДСА, симетрично зміщені відносно
*
Параболічне дзеркало з чотирьохканальним опромінювачем формує чотири ДСА, симетрично зміщені відносно
*
Для переносу всієї інформації одним каналом формується сигнал помилки
*
Для переносу всієї інформації одним каналом формується сигнал помилки
*
Задаючий генератор Н001-22М і підсилювач потужності Н019-02
Когерентний режим роботи РЛС забезпечується
*
Задаючий генератор Н001-22М і підсилювач потужності Н019-02
Когерентний режим роботи РЛС забезпечується
*
Відповідно потрібному режиму зондування формувач гетеродинних частот (ФГЧ) видає в АФМ:
*
Відповідно потрібному режиму зондування формувач гетеродинних частот (ФГЧ) видає в АФМ:
*
Синхронізатор блоку Н019-11
Часовий графік роботи РЛС і РЛПК в цілому та
*
Синхронізатор блоку Н019-11
Часовий графік роботи РЛС і РЛПК в цілому та

*
Високочастотний приймач Н019-09
Трьохканальний високочастотний приймач Н019-09 здійснює:
попередню селекцію і підсилення вхідних
*
Високочастотний приймач Н019-09
Трьохканальний високочастотний приймач Н019-09 здійснює:
попередню селекцію і підсилення вхідних
*
Приймач Н019-03
Приймач Н019-03 реалізує практично всі операції первинної обробки сигналів.
Майже всі
*
Приймач Н019-03
Приймач Н019-03 реалізує практично всі операції первинної обробки сигналів.
Майже всі
*
З трьохканального приймача Н019-09 в приймач Н019-03 надходять сигнали другої проміжної
*
З трьохканального приймача Н019-09 в приймач Н019-03 надходять сигнали другої проміжної

*
При супроводженні однієї цілі по координатам:
4 канали підключені до виходу каналу
*
При супроводженні однієї цілі по координатам:
4 канали підключені до виходу каналу

*
Приймачі оглядовий ПрмО і кутомірно-дальномірний ПрмКД
ПрмО з 24 пар каналів здійснює
*
Приймачі оглядовий ПрмО і кутомірно-дальномірний ПрмКД
ПрмО з 24 пар каналів здійснює
*
.Дальномірні канали ідентичні, але селектуються різними стробами. Строби Д1, Д2, Д3
*
.Дальномірні канали ідентичні, але селектуються різними стробами. Строби Д1, Д2, Д3
*
Блок цифрової обробки БЦО
У БЦО когерентне накопичення відбитих сигналів здійснюється доплерівськими
*
Блок цифрової обробки БЦО
У БЦО когерентне накопичення відбитих сигналів здійснюється доплерівськими

*
Формувачі гетеродинних сигналів ФГС
ФГС в режимі ВЧП виробляє 6 когерентних управляємих
*
Формувачі гетеродинних сигналів ФГС
ФГС в режимі ВЧП виробляє 6 когерентних управляємих
*
При СЧП без компенсації строби займають 12 із 17 можливих позицій,
*
При СЧП без компенсації строби займають 12 із 17 можливих позицій,

Автоматичне наведення
Тривалість такту пошуку і виявлення цілей 10.24 мс.
Впродовж 4.8
Автоматичне наведення
Тривалість такту пошуку і виявлення цілей 10.24 мс.
Впродовж 4.8
*
Огляд повітряного простору і пошук цілей здійснюється стабілізованими по крену і
*
Огляд повітряного простору і пошук цілей здійснюється стабілізованими по крену і

*
Режим випромінювання (ВЧП чи СЧП) визначається разовою командою “ППС” (ВЧП) або
*
Режим випромінювання (ВЧП чи СЧП) визначається разовою командою “ППС” (ВЧП) або

*
Ручне наведення
Тривалість такту пошуку і виявлення цілей 10.24 мс.
Управління сектором
*
Ручне наведення
Тривалість такту пошуку і виявлення цілей 10.24 мс.
Управління сектором
*
Визначення координат цілей
Кутові координати φГ та φВ виявленої цілі визначаються по
*
Визначення координат цілей
Кутові координати φГ та φВ виявленої цілі визначаються по

*
Розпізнавання державної приналежності цілей
Після виявлення і визначення координат цілі Ц-100.02 в
*
Розпізнавання державної приналежності цілей
Після виявлення і визначення координат цілі Ц-100.02 в

*
Супроводження цілей методом “на проході”
Зав'язування траєкторії здійснюється по першому контакту -
*
Супроводження цілей методом “на проході”
Зав'язування траєкторії здійснюється по першому контакту -

*
Для переходу до супроводження цілі з режиму огляду необхідно:
- перевести антену
*
Для переходу до супроводження цілі з режиму огляду необхідно:
- перевести антену

Пошук цілі у вказаному напрямку
По команді на захоплення цілі ДСА антени
Пошук цілі у вказаному напрямку
По команді на захоплення цілі ДСА антени

Перехід до супроводження цілі
1 етап ВУГ (такти ВУГ - 18 тактів
Перехід до супроводження цілі
1 етап ВУГ (такти ВУГ - 18 тактів

В момент t2 строб Д1 досягає зони непрозорості в межах ІЗП4.
В момент t2 строб Д1 досягає зони непрозорості в межах ІЗП4.
*
Супроводження цілі
Супроводження по напрямку
Сигнали цілі Σ+Δ і Σ-Δ з комутатора огляд-супроводження
*
Супроводження цілі
Супроводження по напрямку
Сигнали цілі Σ+Δ і Σ-Δ з комутатора огляд-супроводження

*
Коди помилок ΔεГ і ΔεВ обробляються алгоритмом супроводження (АС) Ц-100.02 на
*
Коди помилок ΔεГ і ΔεВ обробляються алгоритмом супроводження (АС) Ц-100.02 на

*
Супроводження по швидкості
Канал супроводження по швидкості використовує частину одного з кутомірних
*
Супроводження по швидкості
Канал супроводження по швидкості використовує частину одного з кутомірних
*
Супроводження по дальності
Сигнали цілі Σ з виходу комутатора огляд-супроводження оптичної частини
*
Супроводження по дальності
Сигнали цілі Σ з виходу комутатора огляд-супроводження оптичної частини
*
На перетворювачі частоти всіх каналів з формувача гетеродинних сигналів видається напруга
*
На перетворювачі частоти всіх каналів з формувача гетеродинних сигналів видається напруга

*
Підсвітлювання цілі і передача команд радіокорекції
Напівактивна ГСН ракети Р-27Р потребує підсвітлювання
*
Підсвітлювання цілі і передача команд радіокорекції
Напівактивна ГСН ракети Р-27Р потребує підсвітлювання
*
Політ ракети на інтервалі від пуску до виявлення відбитих сигналів здійснюється
*
Політ ракети на інтервалі від пуску до виявлення відбитих сигналів здійснюється
*
Цифри “+1”, “-1” і “0” розряду передаються частотно-маніпульованими сигналами на основі
*
Цифри “+1”, “-1” і “0” розряду передаються частотно-маніпульованими сигналами на основі

*
4. Застосування РЛПК літаків
Міг-29 і Су-27
РЛПК-29 “Рубін” забезпечує:
Пошук, виявлення, визначення
*
4. Застосування РЛПК літаків
Міг-29 і Су-27
РЛПК-29 “Рубін” забезпечує:
Пошук, виявлення, визначення

*
Режими роботи РЛПК
Пошук, виявлення і визначення координат цілей, супроводження “на проході”
*
Режими роботи РЛПК
Пошук, виявлення і визначення координат цілей, супроводження “на проході”

*
Взаємодія з ОЕПрНК
Взаємодія між РЛПК і ОЕПрНК здійснюється при:
- встановленні перемикача
*
Взаємодія з ОЕПрНК
Взаємодія між РЛПК і ОЕПрНК здійснюється при:
- встановленні перемикача

*
Органи управління СУВ-29
Пульт спеціальних режимів ПСР-31
БАЗА МЕТРИ – введення бази цілі
РЕЖ
*
Органи управління СУВ-29
Пульт спеціальних режимів ПСР-31
БАЗА МЕТРИ – введення бази цілі
РЕЖ
*
Пульт управління режимами ПУР-31
ПЕРЕКЛ ΔН – ручне введення різниці висот винищувача
*
Пульт управління режимами ПУР-31
ПЕРЕКЛ ΔН – ручне введення різниці висот винищувача

*
ЗАЗВАТ ЧУЖОЙ-СВОЙ – управління блокуванням атаки своєї цілі,
ТОРМОЗ - БЕЗ ТОРМОЗА
*
ЗАЗВАТ ЧУЖОЙ-СВОЙ – управління блокуванням атаки своєї цілі,
ТОРМОЗ - БЕЗ ТОРМОЗА

*
РЛПК-27 “Меч” забезпечує:
Виявлення, визначення координат на проході, захоплення на супроводження повітряних
*
РЛПК-27 “Меч” забезпечує:
Виявлення, визначення координат на проході, захоплення на супроводження повітряних
*
Режими роботи РЛПК
Пошук, виявлення і визначення координат цілей, супроводження “на проході”
*
Режими роботи РЛПК
Пошук, виявлення і визначення координат цілей, супроводження “на проході”

*
Взаємодія з ОЕПС
Ручний або автоматичний вибір ведучого каналу залежить від положення
*
Взаємодія з ОЕПС
Ручний або автоматичний вибір ведучого каналу залежить від положення
*
Питання для самоконтролю
1. Призначення, склад і завдання РЛПК-29.
2. Бойове застосування
*
Питання для самоконтролю
1. Призначення, склад і завдання РЛПК-29.
2. Бойове застосування
 Заклепочные соединения
Заклепочные соединения Состояние и развитие ВЭД нефтяной отрасли России Карташова Галина Т-093
Состояние и развитие ВЭД нефтяной отрасли России Карташова Галина Т-093  Презентация "Экономика как наука" - скачать презентации по Экономике
Презентация "Экономика как наука" - скачать презентации по Экономике 6 урок
6 урок Как празнуваме Нова година Проекти на учениците от 3. клас 4.ОУ „Димчо Дебелянов“ Благоевград
Как празнуваме Нова година Проекти на учениците от 3. клас 4.ОУ „Димчо Дебелянов“ Благоевград Cost-benefit analysis Анализ «издержки-выгоды» Выполнила: Калиновская М.В. 4 курс политологии ГУ-ВШЭ
Cost-benefit analysis Анализ «издержки-выгоды» Выполнила: Калиновская М.В. 4 курс политологии ГУ-ВШЭ  Анализ текста как подготовка рабочих материалов к написанию сочинения – рассуждения (части С ЕГЭ). Формулируем, комментируем, ар
Анализ текста как подготовка рабочих материалов к написанию сочинения – рассуждения (части С ЕГЭ). Формулируем, комментируем, ар Как найти клиентов и не потерять деньги в интернете
Как найти клиентов и не потерять деньги в интернете  ГТО - путь к здоровью
ГТО - путь к здоровью Сложение натуральных чисел.
Сложение натуральных чисел.  Family and relations 1
Family and relations 1 Современные высокотехнологичные решения для строительной отрасли, в сфере эксплуатации транспорта и различной техники
Современные высокотехнологичные решения для строительной отрасли, в сфере эксплуатации транспорта и различной техники Воздушно-десантная подготовка. Основы прыжка с парашютом, ТТХ ПС Д-6с4, особые случаи при совершении прыжка. (Тема 1)
Воздушно-десантная подготовка. Основы прыжка с парашютом, ТТХ ПС Д-6с4, особые случаи при совершении прыжка. (Тема 1) Софийский собор
Софийский собор Муниципальное общеобразовательное учреждение гимназия № 15 им.Н.Н.Белоусова Основы педагогического мастерства г. Сочи, 2009
Муниципальное общеобразовательное учреждение гимназия № 15 им.Н.Н.Белоусова Основы педагогического мастерства г. Сочи, 2009 Этапы торгового визита Шпаргалка для торгового представителя
Этапы торгового визита Шпаргалка для торгового представителя ПО ПРИМЕРАМ РАБОТ РУССКИХ ХУДОЖНИКОВ XIX ВЕКА
ПО ПРИМЕРАМ РАБОТ РУССКИХ ХУДОЖНИКОВ XIX ВЕКА Осуществление деятельностного подхода к образованию через интерактивный урок
Осуществление деятельностного подхода к образованию через интерактивный урок РЕОЛОГИЯ КРОВИ
РЕОЛОГИЯ КРОВИ Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Библиотека STL. Классы string, vector
Библиотека STL. Классы string, vector Расчет ветроколеса с горизонтальной осью
Расчет ветроколеса с горизонтальной осью Презентация Microsoft PowerPoint
Презентация Microsoft PowerPoint Das intelligente Haus
Das intelligente Haus Психологическая подготовка к ЕГЭ Рекомендации ведущих российских психологов
Психологическая подготовка к ЕГЭ Рекомендации ведущих российских психологов Визы Российской Федерации
Визы Российской Федерации Народный промысел – «Гжель»
Народный промысел – «Гжель» Схемы использования аккредитива при сделках с недвижимостью Плательщик – покупатель товаров/услуги возможность использо
Схемы использования аккредитива при сделках с недвижимостью Плательщик – покупатель товаров/услуги возможность использо