- Способы преобразования чертежа

Содержание
- 2. Преобразование чертежа – приведение геометрических фигур (рис. 5.1, 5.2) в частное положение (параллельное или проецирующее (рис.
- 3. Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических задач: метрических задач (определение длины,
- 4. Условия преобразования: 1). Положение фигуры неизменно; 2). Изменяется положение одной из двух плоскостей проекций; 3). Новую
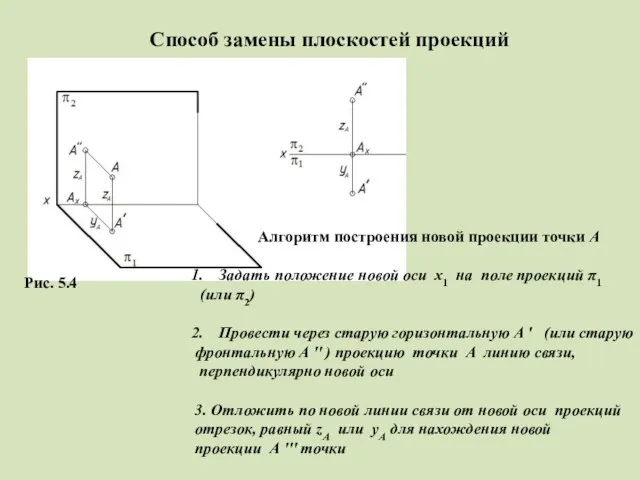
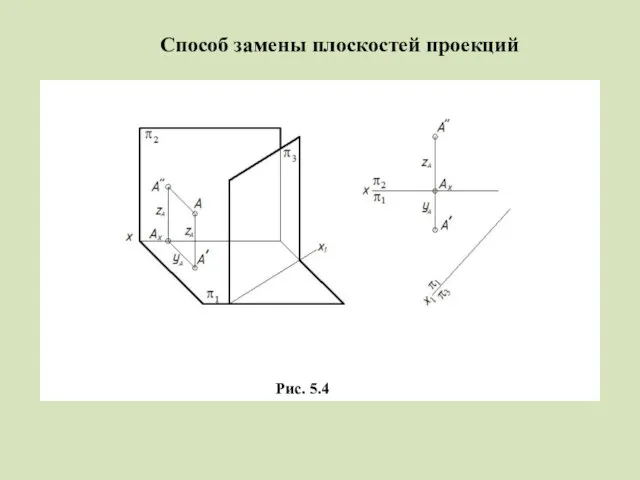
- 5. Способ замены плоскостей проекций Рис. 5.4 Алгоритм построения новой проекции точки A Задать положение новой оси
- 6. Способ замены плоскостей проекций Рис. 5.4
- 7. Способ замены плоскостей проекций Рис. 5.4
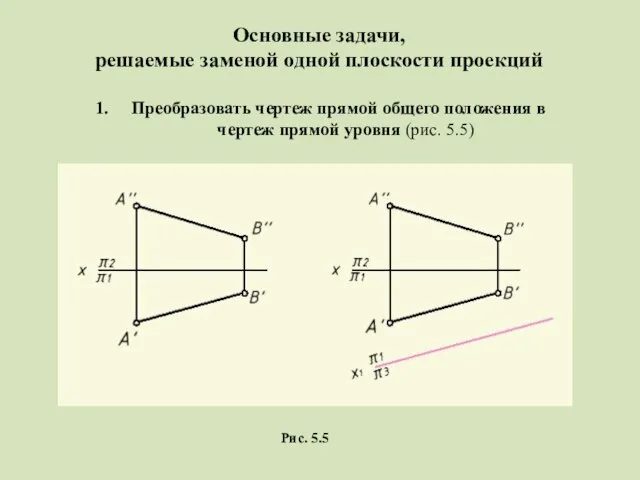
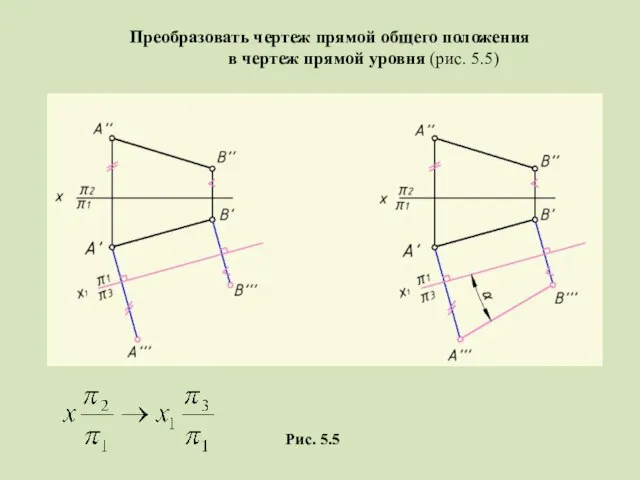
- 10. Основные задачи, решаемые заменой одной плоскости проекций Преобразовать чертеж прямой общего положения в чертеж прямой уровня
- 11. Преобразовать чертеж прямой общего положения в чертеж прямой уровня (рис. 5.5) Рис. 5.5
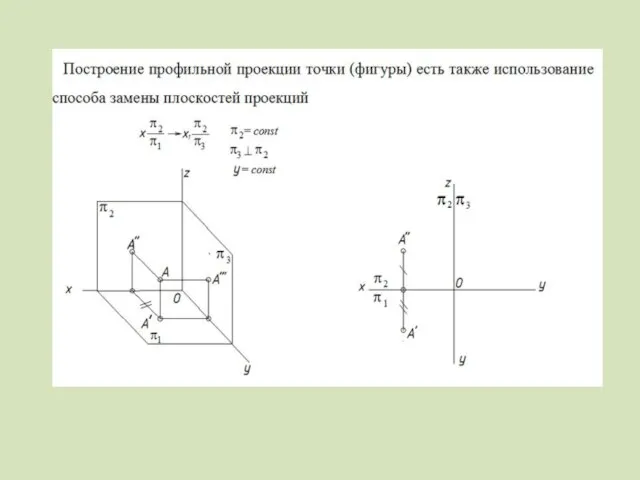
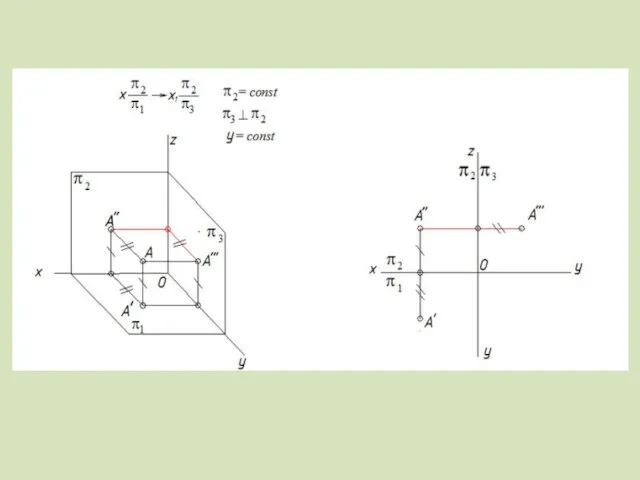
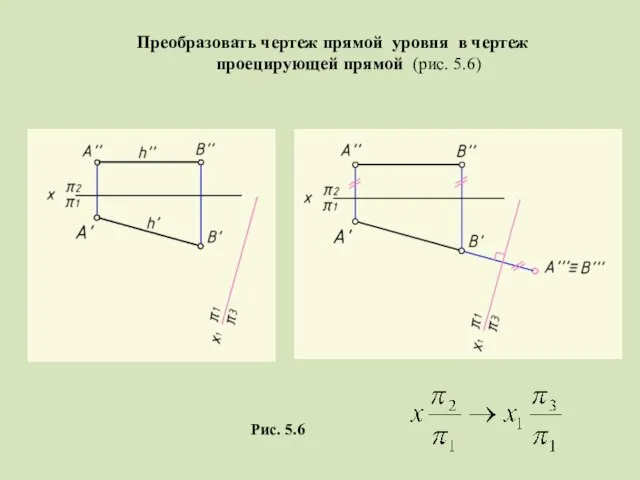
- 12. Преобразовать чертеж прямой уровня в чертеж проецирующей прямой (рис. 5.6) Рис. 5.6
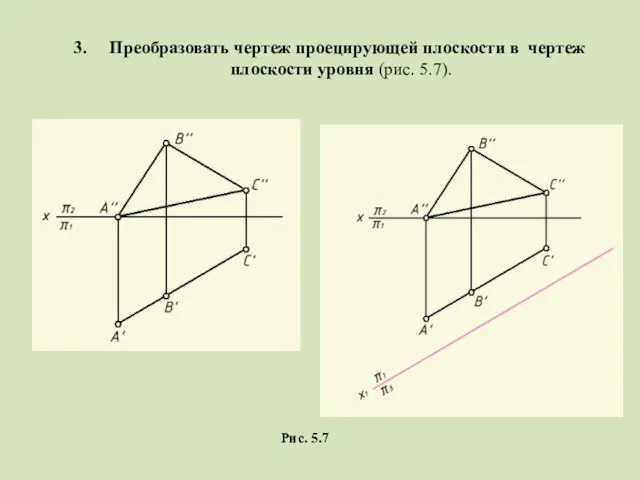
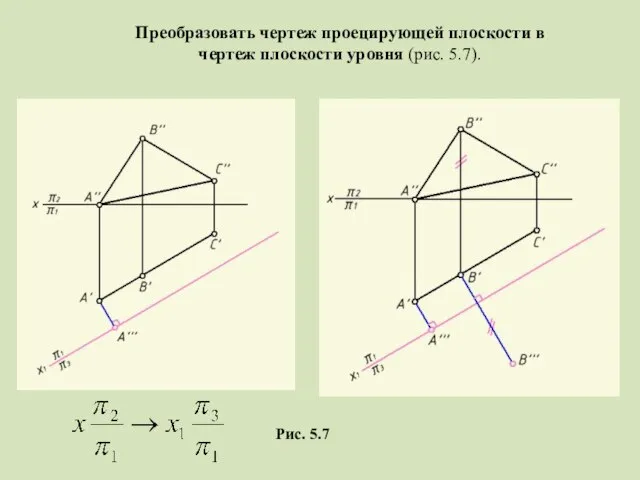
- 13. 3. Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7). Рис. 5.7
- 14. Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7). Рис. 5.7
- 15. Рис. 5.7 Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
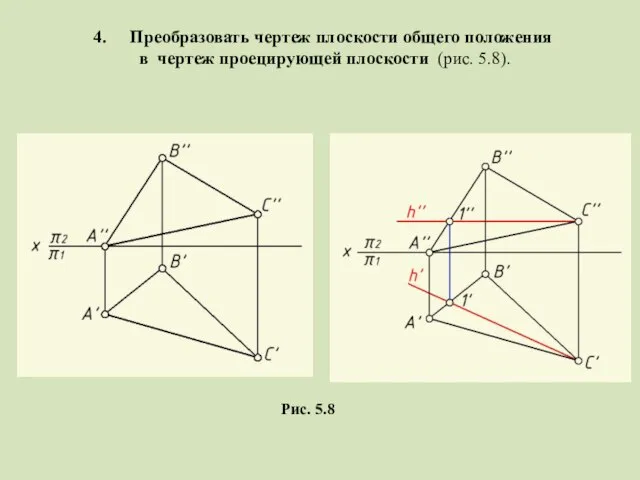
- 16. Преобразовать чертеж плоскости общего положения в чертеж проецирующей плоскости (рис. 5.8). Рис. 5.8
- 17. Рис. 5.8 Преобразовать чертеж плоскости общего положения в чертеж проецирующей плоскости (рис. 5.8).
- 18. Рис. 5.8 Преобразовать чертеж плоскости общего положения в чертеж проецирующей плоскости (рис. 5.8).
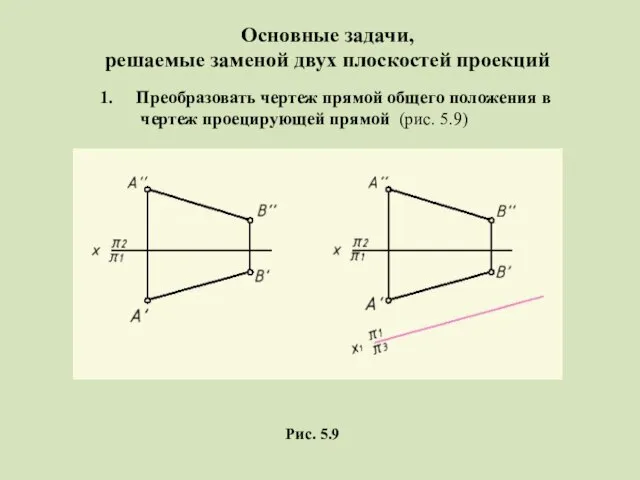
- 19. Основные задачи, решаемые заменой двух плоскостей проекций Преобразовать чертеж прямой общего положения в чертеж проецирующей прямой
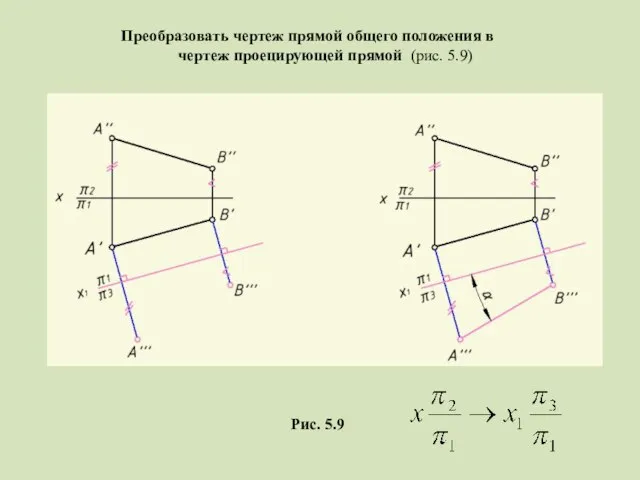
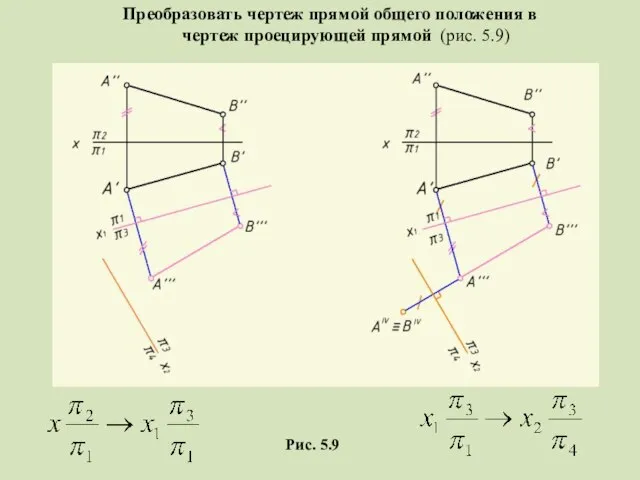
- 20. Преобразовать чертеж прямой общего положения в чертеж проецирующей прямой (рис. 5.9) Рис. 5.9
- 21. Преобразовать чертеж прямой общего положения в чертеж проецирующей прямой (рис. 5.9) Рис. 5.9
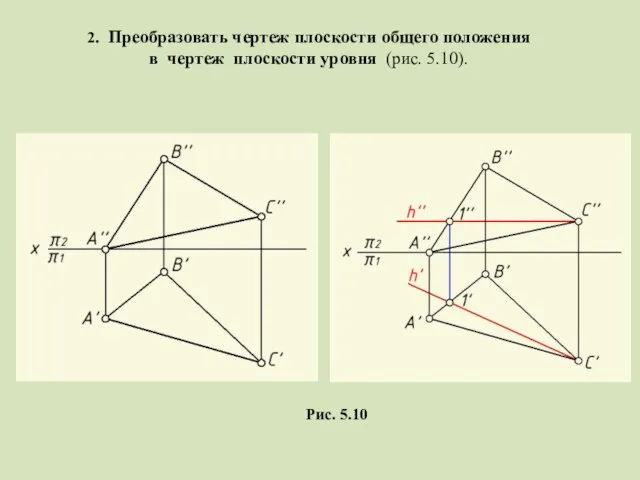
- 22. 2. Преобразовать чертеж плоскости общего положения в чертеж плоскости уровня (рис. 5.10). Рис. 5.10
- 23. Рис. 5.10 Преобразовать чертеж плоскости общего положения в чертеж плоскости уровня (рис. 5.10).
- 24. Рис. 5.10 Преобразовать чертеж плоскости общего положения в чертеж плоскости уровня (рис. 5.10).
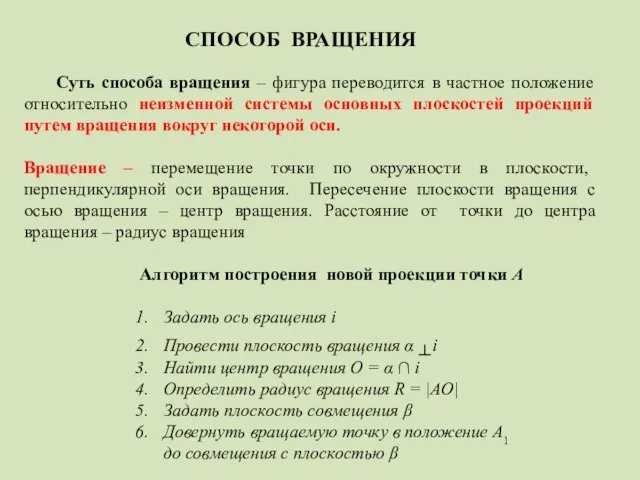
- 25. CПОСОБ ВРАЩЕНИЯ Суть способа вращения – фигура переводится в частное положение относительно неизменной системы основных плоскостей
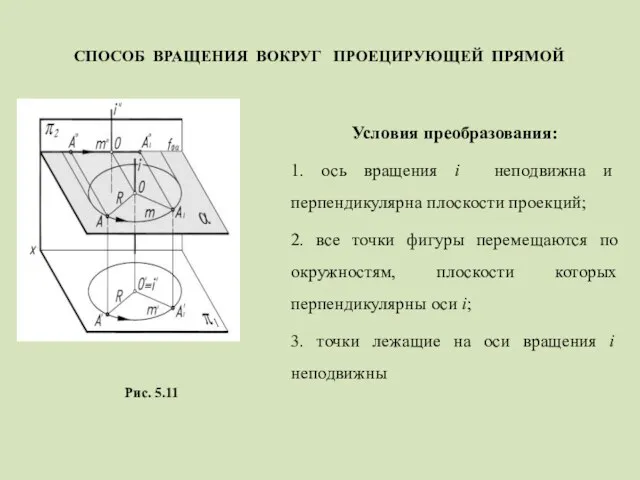
- 26. СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ Рис. 5.11 Условия преобразования: 1. ось вращения i неподвижна и перпендикулярна
- 27. Пример: Повернуть отрезок AB вокруг проецирующей прямой i Рис. 5.12
- 28. Рис. 5.12
- 30. Скачать презентацию
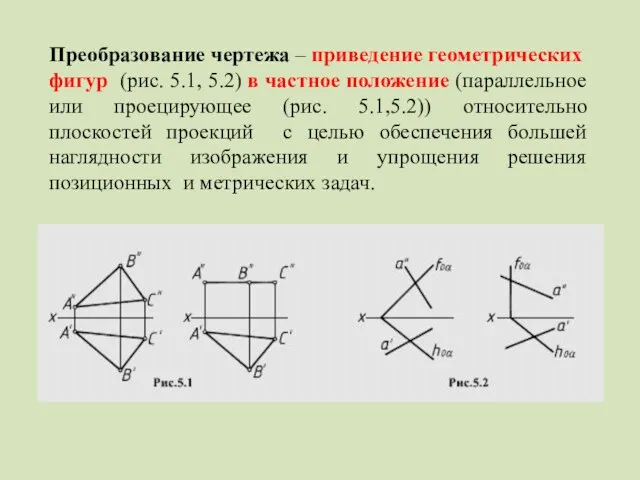
Преобразование чертежа – приведение геометрических
фигур (рис. 5.1, 5.2) в частное
Преобразование чертежа – приведение геометрических
фигур (рис. 5.1, 5.2) в частное
Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических
Частные положения фигур относительно плоскостей проекций более удобны для решения геометрических
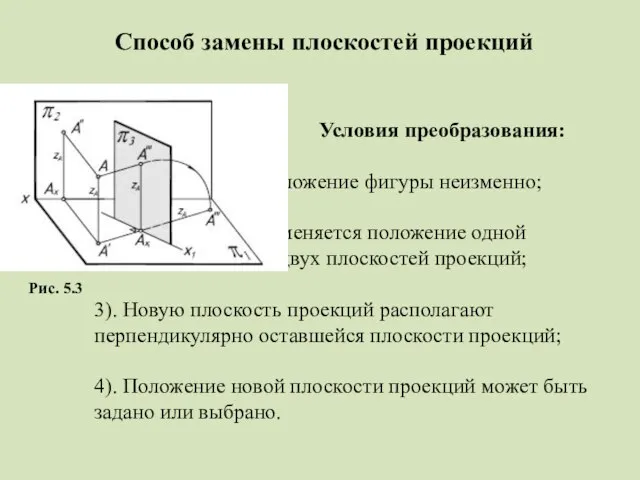
Условия преобразования:
1). Положение фигуры неизменно;
2). Изменяется положение одной
Условия преобразования:
1). Положение фигуры неизменно;
2). Изменяется положение одной
Способ замены плоскостей проекций
Рис. 5.4
Алгоритм построения новой проекции точки A
Задать
Способ замены плоскостей проекций
Рис. 5.4
Алгоритм построения новой проекции точки A
Задать
Способ замены плоскостей проекций
Рис. 5.4
Способ замены плоскостей проекций
Рис. 5.4

Способ замены плоскостей проекций
Рис. 5.4
Способ замены плоскостей проекций
Рис. 5.4
Основные задачи,
решаемые заменой одной плоскости проекций
Преобразовать чертеж прямой общего
Основные задачи,
решаемые заменой одной плоскости проекций
Преобразовать чертеж прямой общего
Преобразовать чертеж прямой общего положения
в чертеж прямой уровня (рис. 5.5)
Рис.
Преобразовать чертеж прямой общего положения
в чертеж прямой уровня (рис. 5.5)
Рис.
Преобразовать чертеж прямой уровня в чертеж проецирующей прямой (рис. 5.6)
Рис. 5.6
Преобразовать чертеж прямой уровня в чертеж проецирующей прямой (рис. 5.6)
Рис. 5.6
3. Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Рис.
3. Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Рис.
Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Рис. 5.7
Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Рис. 5.7
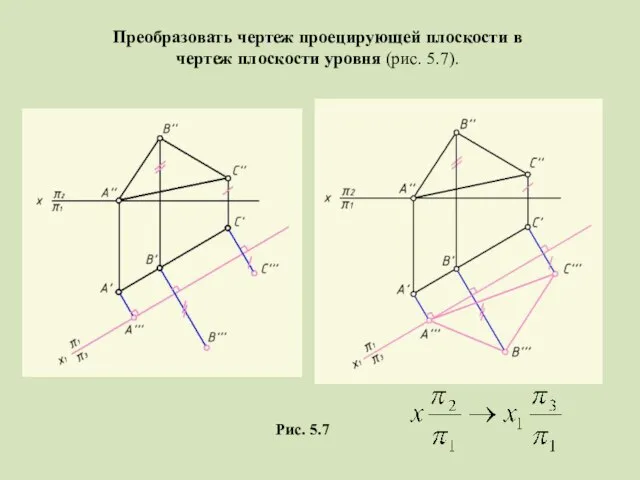
Рис. 5.7
Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Рис. 5.7
Преобразовать чертеж проецирующей плоскости в чертеж плоскости уровня (рис. 5.7).
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис. 5.8).
Рис.
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис. 5.8).
Рис.
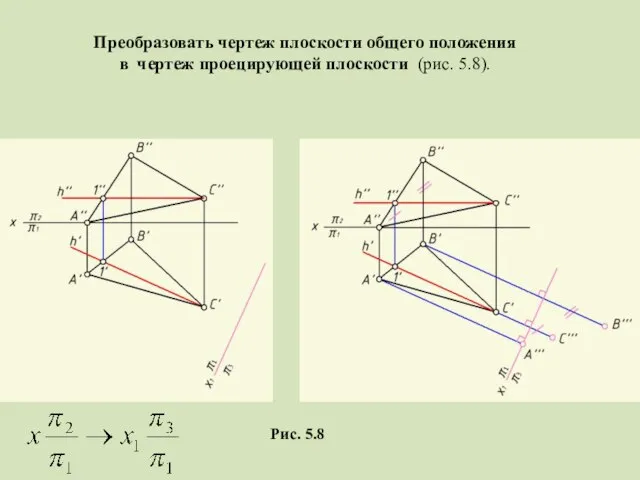
Рис. 5.8
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис.
Рис. 5.8
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис.
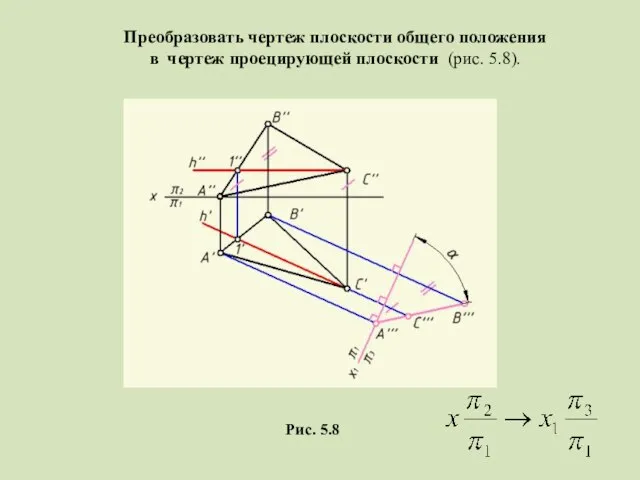
Рис. 5.8
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис.
Рис. 5.8
Преобразовать чертеж плоскости общего положения
в чертеж проецирующей плоскости (рис.
Основные задачи,
решаемые заменой двух плоскостей проекций
Преобразовать чертеж прямой общего
Основные задачи,
решаемые заменой двух плоскостей проекций
Преобразовать чертеж прямой общего
Преобразовать чертеж прямой общего положения в
чертеж проецирующей прямой (рис. 5.9)
Рис.
Преобразовать чертеж прямой общего положения в
чертеж проецирующей прямой (рис. 5.9)
Рис.
Преобразовать чертеж прямой общего положения в
чертеж проецирующей прямой (рис. 5.9)
Рис.
Преобразовать чертеж прямой общего положения в
чертеж проецирующей прямой (рис. 5.9)
Рис.
2. Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
2. Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
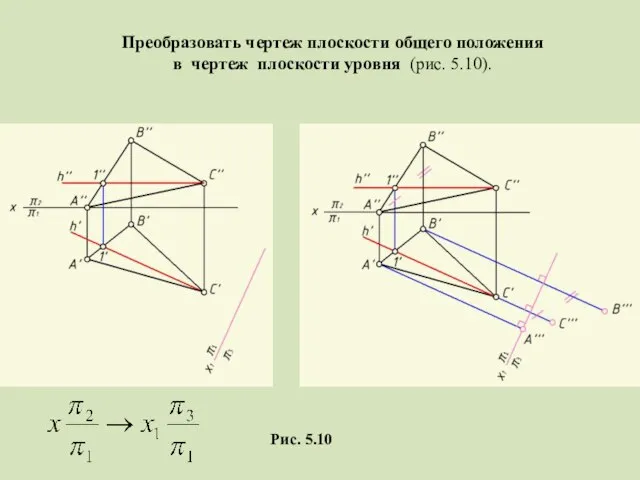
Рис. 5.10
Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
Рис. 5.10
Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
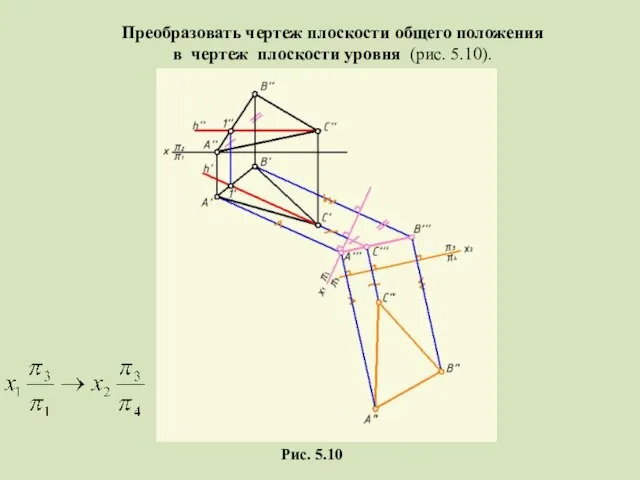
Рис. 5.10
Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
Рис. 5.10
Преобразовать чертеж плоскости общего положения
в чертеж плоскости уровня (рис.
CПОСОБ ВРАЩЕНИЯ
Суть способа вращения – фигура переводится в частное положение относительно
CПОСОБ ВРАЩЕНИЯ
Суть способа вращения – фигура переводится в частное положение относительно
СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ
Рис. 5.11
Условия преобразования:
1. ось вращения i неподвижна
СПОСОБ ВРАЩЕНИЯ ВОКРУГ ПРОЕЦИРУЮЩЕЙ ПРЯМОЙ
Рис. 5.11
Условия преобразования:
1. ось вращения i неподвижна
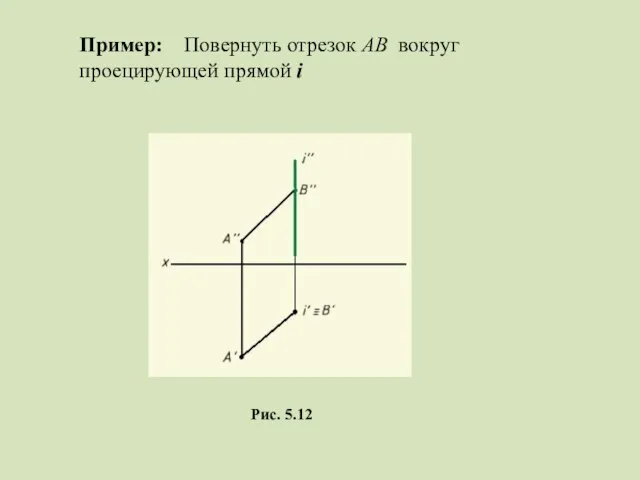
Пример: Повернуть отрезок AB вокруг проецирующей прямой i
Рис. 5.12
Пример: Повернуть отрезок AB вокруг проецирующей прямой i
Рис. 5.12
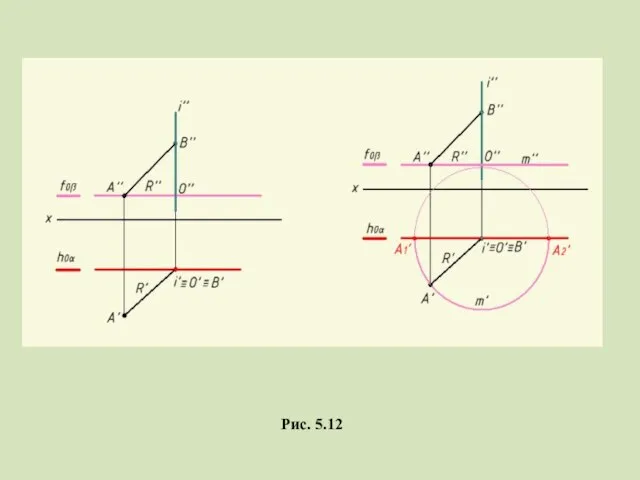
Рис. 5.12
Рис. 5.12
 Чертеж трех видов детали (8 класс)
Чертеж трех видов детали (8 класс) Конструкторско-технологическое обеспечение проекта туристического агентства Мир на ладони
Конструкторско-технологическое обеспечение проекта туристического агентства Мир на ладони Макеты указателей улиц
Макеты указателей улиц Объёмные геометрические тела
Объёмные геометрические тела Искусство шрифта. 7 кл
Искусство шрифта. 7 кл Чертежные инструменты и принадлежности
Чертежные инструменты и принадлежности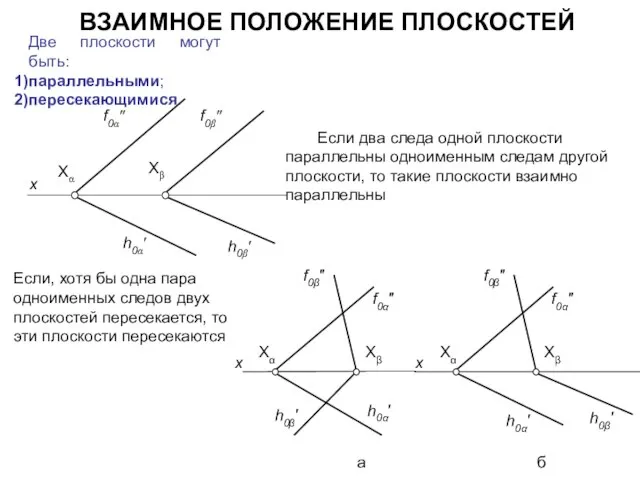 Взаимное положение плоскостей
Взаимное положение плоскостей Чертежи резьбовых соединений
Чертежи резьбовых соединений Виды перспективы
Виды перспективы Створення креслень в КОМПАС-3D V14/16
Створення креслень в КОМПАС-3D V14/16 Основы конструирования электронных средств
Основы конструирования электронных средств Метод архитектора
Метод архитектора Чертежи и аксонометрические проекции геометрических тел. Урок 18
Чертежи и аксонометрические проекции геометрических тел. Урок 18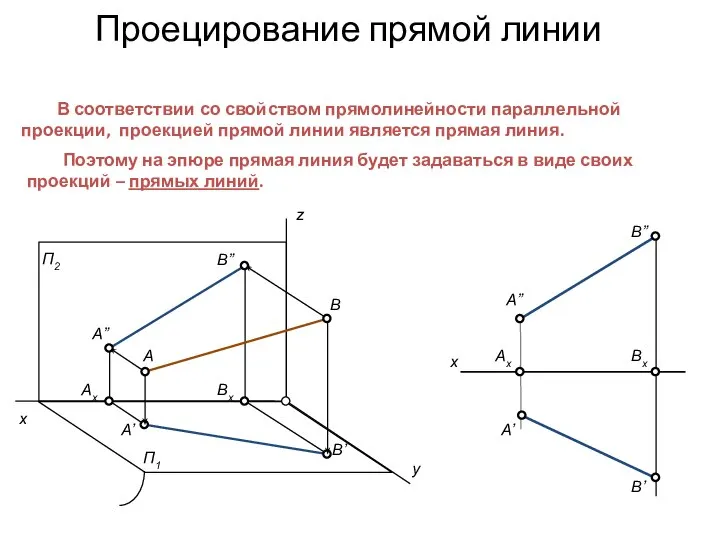 Проецирование прямой линии
Проецирование прямой линии Линии чертежа
Линии чертежа Чертежи резьбовых соединений
Чертежи резьбовых соединений Кривая линия в Moodle. Практика 4
Кривая линия в Moodle. Практика 4 Строительное черчение. Строительные чертежи
Строительное черчение. Строительные чертежи Классификация разрезов
Классификация разрезов Состав архитектурного проекта
Состав архитектурного проекта Деталирование
Деталирование Компоновка чертежа
Компоновка чертежа Линии чертежа. Инженерная графика и компьютерная графика
Линии чертежа. Инженерная графика и компьютерная графика Виды чертежей
Виды чертежей Чертеж болтового и шпилечного соединения
Чертеж болтового и шпилечного соединения Определение необходимого количества изображений при выполнении чертежа
Определение необходимого количества изображений при выполнении чертежа Методологические основы и традиционные методы технического проектирования и конструирования
Методологические основы и традиционные методы технического проектирования и конструирования Изображение - виды, разрезы, сечения
Изображение - виды, разрезы, сечения