- Основные понятия и аксиомы статики

Содержание
- 2. Структурно-логическая схема предмета «Техническая механика» - комплексная дисциплина Детали машин: устройство, принцип действия, области применения, основы
- 3. Основные понятия статики Материальная точка – условно принятое тело, размерами которого можно пренебречь по сравнению с
- 4. Механическое движение относительно Покой и движение – понятия относительные! Для описания движения тела нужно указать, по
- 5. Положение тела в пространстве
- 6. Характеристики силы F Л. д. с. С α Величина (модуль) Точка приложения (т.С) Линия действия (л.д.с.)
- 7. 1Н = 1кг·м/с2 СИЛА - величина векторная внешние внутренние активные реактивные Совокупность сил, действующих на какое-либо
- 8. Аксиомы статики Как мы уже знаем, статика изучает условия, при которых тело или материальная точка находятся
- 9. Первая аксиома Под действием уравновешенной системы сил абсолютно твердое тело или материальная точка находятся в равновесии
- 10. Вторая аксиома Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются
- 11. Третья аксиома Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания
- 12. Четвертая аксиома (правило параллелограмма сил) Равнодействующая двух сил, приложенных в одной точке, приложена в той точке
- 13. Пятая аксиома При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие. Силы действующие и
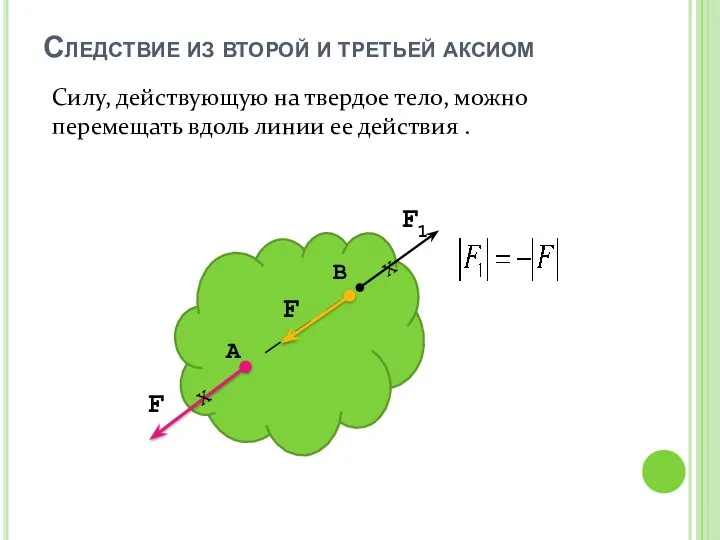
- 14. Следствие из второй и третьей аксиом Силу, действующую на твердое тело, можно перемещать вдоль линии ее
- 15. Самостоятельная работа обучающихся — подготовка электронной презентации на тему «Великие ученые-механики»
- 16. Тема 1.2. Плоская система сходящихся сил (ПССС) Лекция 2
- 17. Плоская система сходящихся сил (ПССС) -система сил, линии действия которых пересекаются в одной точке. F1 F4
- 18. F1 F4 F3 F2 Геометрический способ определения равнодействующей ПССС F3 F4 F1 F2 FΣ
- 19. Если ПССС находится в равновесии, то многоугольник сил этой системы должен быть замкнут. Условие равновесия ПССС
- 20. Пример F=10 кН 30 0 45 0 А Теорема синусов
- 21. Проекция силы на ось α F 0 x Величина проекции силы на ось равна произведению модуля
- 22. проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в
- 23. Проекция силы на две взаимно перпендикулярные оси
- 24. Аналитический способ определения равнодействующей ПССС
- 25. Модуль (величина) равнодействующей Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующей
- 26. Условия равновесия в аналитической форме Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций
- 27. Система уравнений равновесия ПССС: В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно,
- 28. Пример 1. Определить величины и знаки проекций Пример 2. Определить величину и направление равнодействующей плоской системы
- 29. Самостоятельная работа обучающихся — выполнение расчетно-графической работы по теме «Плоская система сходящихся сил»
- 30. Тема 1.3. Пара сил и момент силы относительно точки Лекция 3
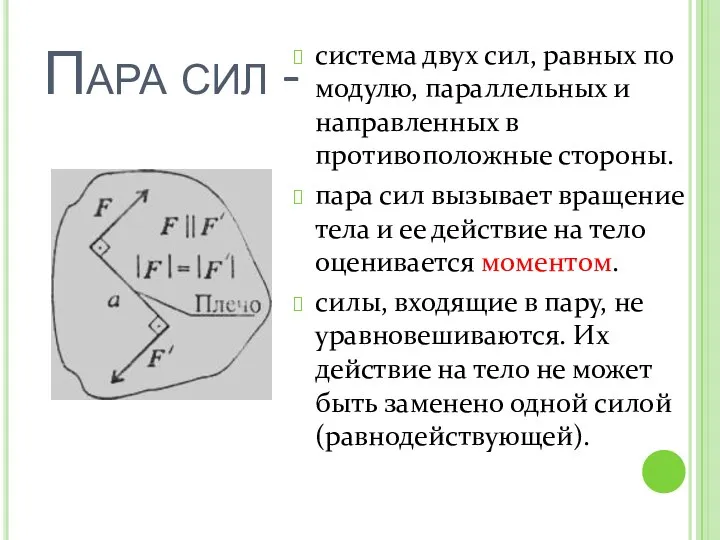
- 31. Пара сил - система двух сил, равных по модулю, параллельных и направленных в противоположные стороны. пара
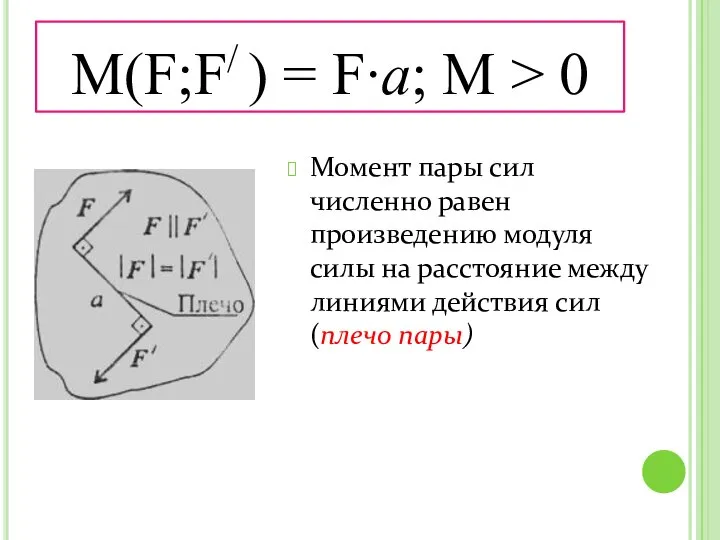
- 32. M(F;F/ ) = F∙а; М > 0 Момент пары сил численно равен произведению модуля силы на
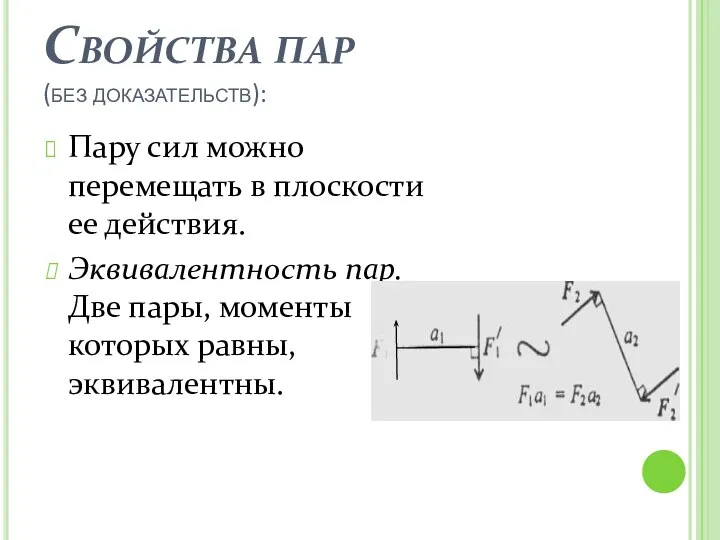
- 33. Свойства пар (без доказательств): Пару сил можно перемещать в плоскости ее действия. Эквивалентность пар. Две пары,
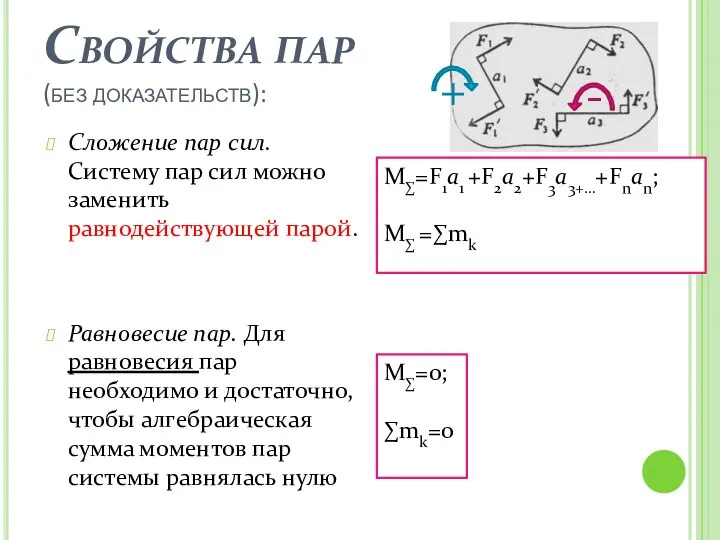
- 34. Свойства пар (без доказательств): Сложение пар сил. Систему пар сил можно заменить равнодействующей парой. Равновесие пар.
- 35. Момент силы относительно точки Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки,
- 36. Примеры решения задач Пример 1. Дана пара сил |F1 | = |F2| = 42 кН; плечо
- 37. Самостоятельная работа обучающихся — решение задач по теме «Пара сил и момент силы относительно точки»
- 38. Основные понятия: Свободное тело - тело, перемещение которого ничем не ограничено. Несвободное тело – тело, перемещение
- 39. Виды связей: Идеально гладкая поверхность R R R А А А
- 40. Виды связей: Точечная опора RВ RА А В
- 41. Виды связей: Идеальная (нерастяжимая, гибкая) нить Идеальный (несгибаемый) стержень G
- 42. Шарнирная опора Цилиндрический шарнир Шарнирно-подвижная опора
- 43. Шарнирная опора Шаровой шарнир Шарнирно-неподвижная опора
- 44. Защемление (жесткая заделка)
- 45. Тема 1.4. Плоская система произвольно расположенных сил (ПСПРС) Лекция 4
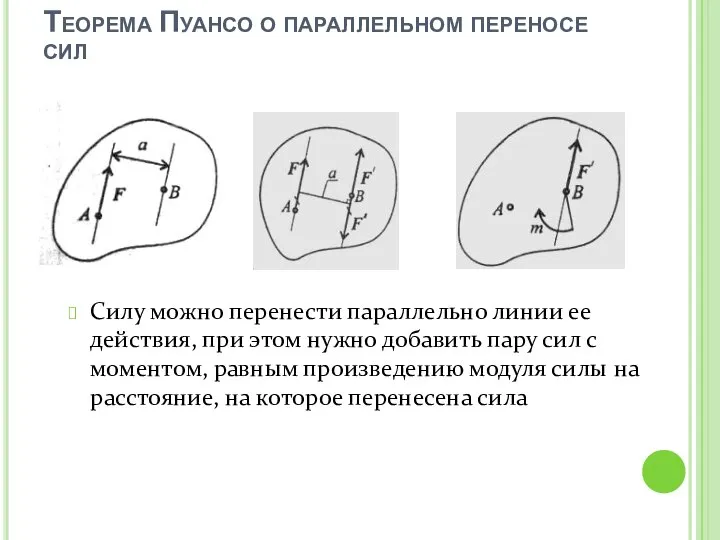
- 46. Теорема Пуансо о параллельном переносе сил Силу можно перенести параллельно линии ее действия, при этом нужно
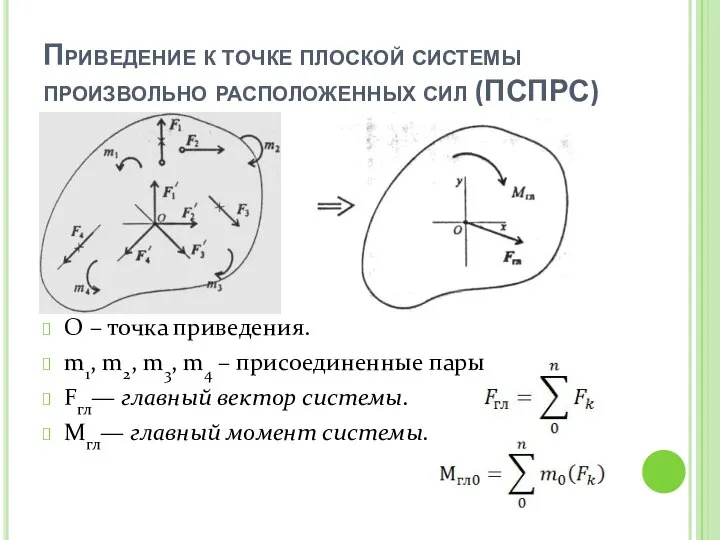
- 47. Приведение к точке плоской системы произвольно расположенных сил (ПСПРС) О – точка приведения. m1, m2, m3,
- 48. Fгл— главный вектор системы. Мгл— главный момент системы.
- 49. Условие равновесия произвольной плоской системы сил (ПСПРС) где А и В — разные точки приведения Для
- 50. Условие равновесия произвольной плоской системы сил (ПСПРС) Первая форма уравнений равновесия Вторая форма уравнений равновесия Третья
- 51. Тема 1.4. Балочные системы Лекция 5
- 52. Виды нагрузок Виды нагрузок по способу приложения сосредоточенные распределенные q — интенсивность нагрузки, кН/м; l —
- 53. Балка – конструктивная деталь в виде прямого бруса, закрепленная на опорах и изгибаемая приложенными к ней
- 54. Разновидности балочных систем Балка с жесткой заделкой (защемлением) Заделку заменяют двумя составляющими силы RAx и RAy
- 56. Скачать презентацию
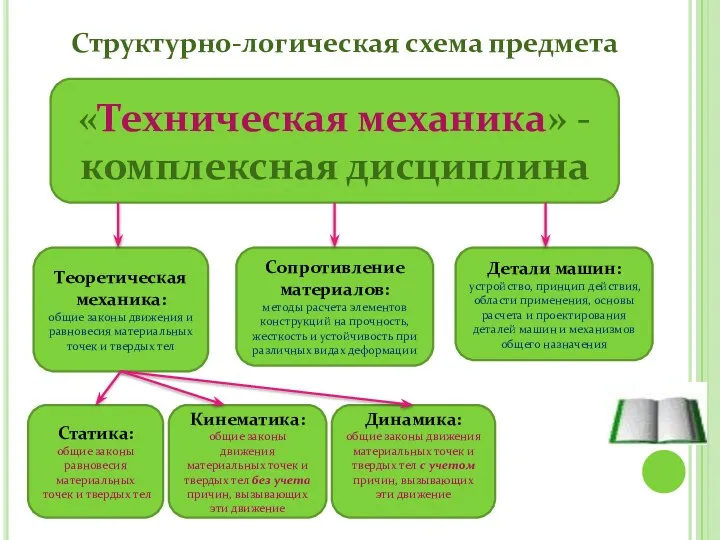
Структурно-логическая схема предмета
«Техническая механика» - комплексная дисциплина
Детали машин:
устройство, принцип действия, области
Структурно-логическая схема предмета
«Техническая механика» - комплексная дисциплина
Детали машин:
устройство, принцип действия, области
Основные понятия статики
Материальная точка – условно принятое тело, размерами которого можно
Основные понятия статики
Материальная точка – условно принятое тело, размерами которого можно
Механическое движение относительно
Покой и движение – понятия относительные!
Для описания
Механическое движение относительно
Покой и движение – понятия относительные!
Для описания
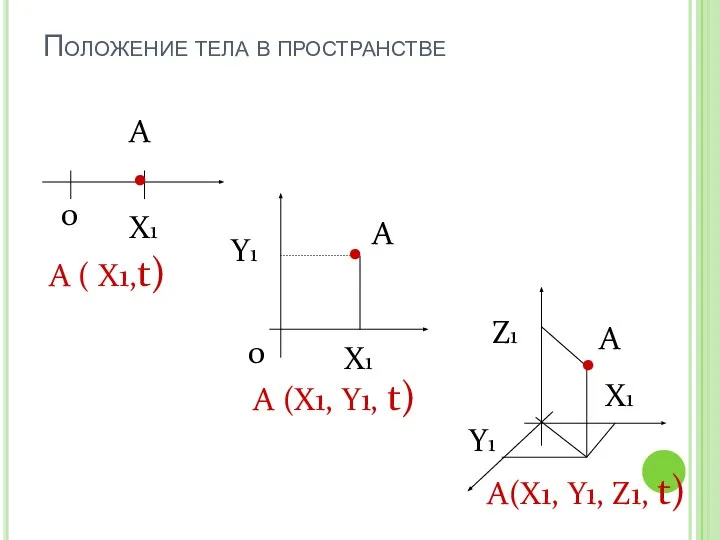
Положение тела в пространстве
Положение тела в пространстве
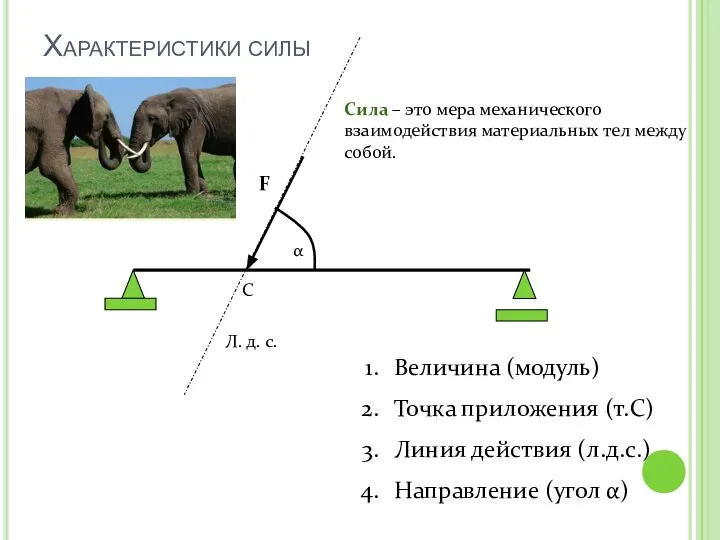
Характеристики силы
F
Л. д. с.
С
α
Величина (модуль)
Точка приложения (т.С)
Линия действия (л.д.с.)
Направление (угол α)
Сила
Характеристики силы
F
Л. д. с.
С
α
Величина (модуль)
Точка приложения (т.С)
Линия действия (л.д.с.)
Направление (угол α)
Сила
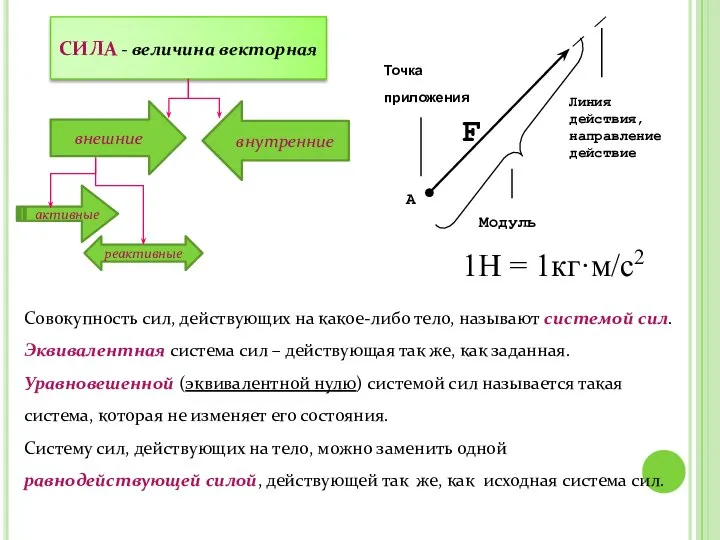
1Н = 1кг·м/с2
СИЛА - величина векторная
внешние
внутренние
активные
реактивные
Совокупность сил, действующих на какое-либо тело,
1Н = 1кг·м/с2
СИЛА - величина векторная
внешние
внутренние
активные
реактивные
Совокупность сил, действующих на какое-либо тело,
Аксиомы статики
Как мы уже знаем, статика изучает условия, при которых тело
Аксиомы статики
Как мы уже знаем, статика изучает условия, при которых тело
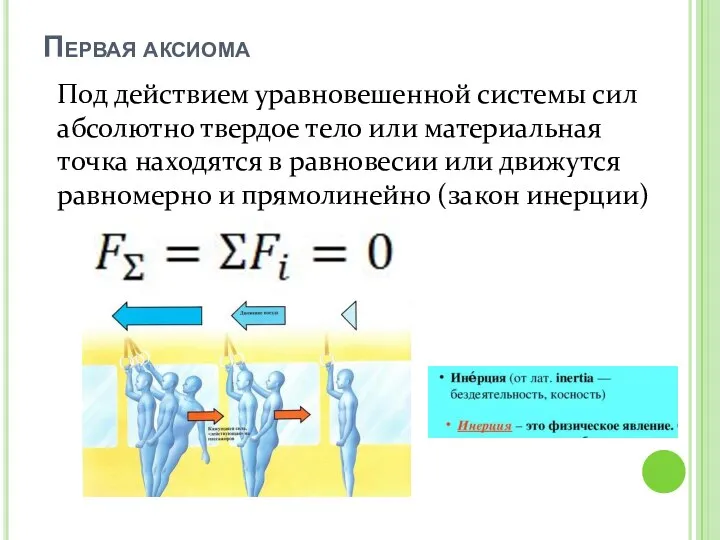
Первая аксиома
Под действием уравновешенной системы сил абсолютно твердое тело или материальная
Первая аксиома
Под действием уравновешенной системы сил абсолютно твердое тело или материальная
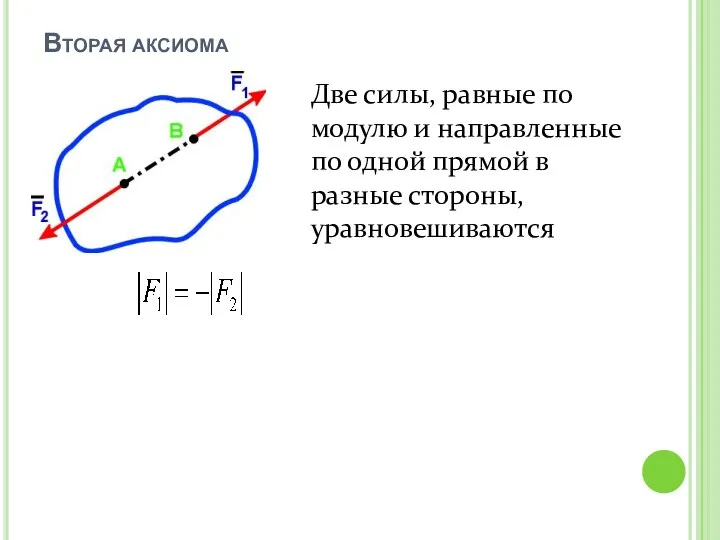
Вторая аксиома
Две силы, равные по модулю и направленные по одной прямой
Вторая аксиома
Две силы, равные по модулю и направленные по одной прямой
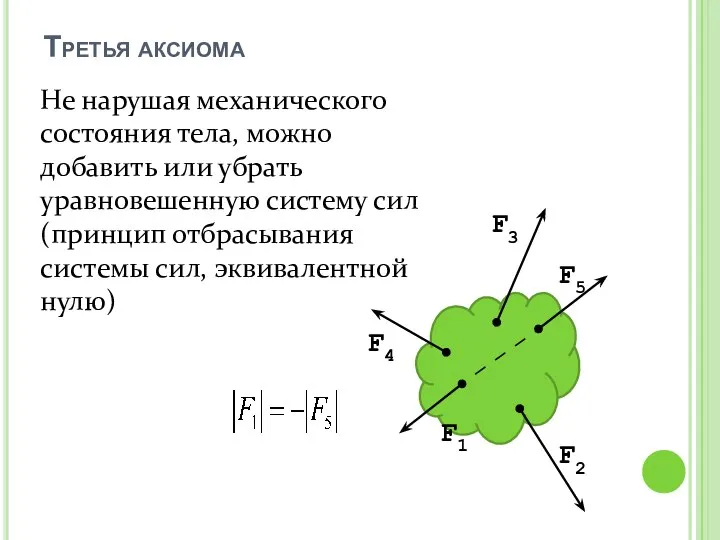
Третья аксиома
Не нарушая механического состояния тела, можно добавить или убрать уравновешенную
Третья аксиома
Не нарушая механического состояния тела, можно добавить или убрать уравновешенную
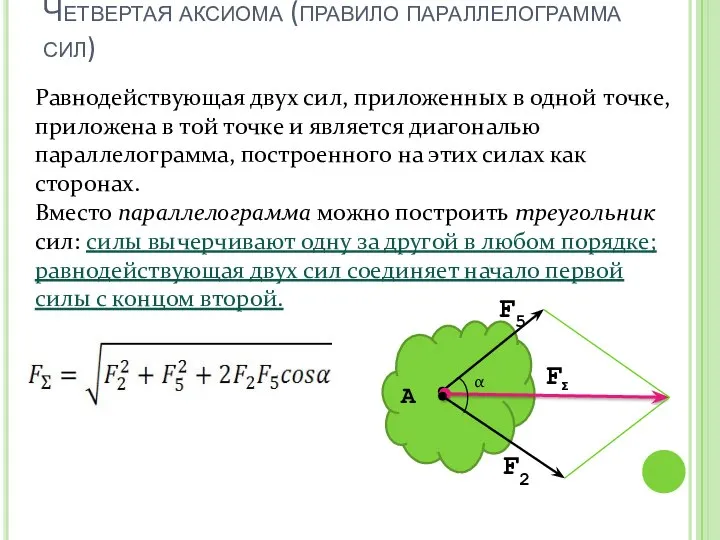
Четвертая аксиома (правило параллелограмма сил)
Равнодействующая двух сил, приложенных в одной точке,
Четвертая аксиома (правило параллелограмма сил)
Равнодействующая двух сил, приложенных в одной точке,
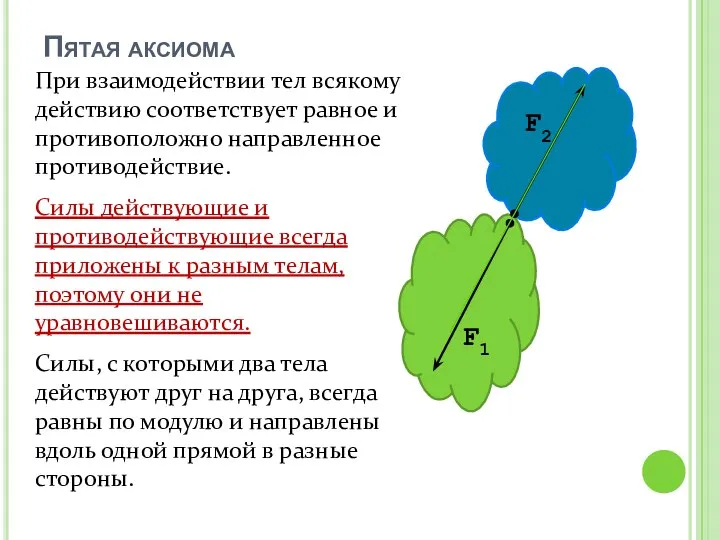
Пятая аксиома
При взаимодействии тел всякому действию соответствует равное и противоположно направленное
Пятая аксиома
При взаимодействии тел всякому действию соответствует равное и противоположно направленное
Следствие из второй и третьей аксиом
Силу, действующую на твердое тело, можно
Следствие из второй и третьей аксиом
Силу, действующую на твердое тело, можно
Самостоятельная работа обучающихся —
подготовка электронной презентации на тему «Великие ученые-механики»
Самостоятельная работа обучающихся —
подготовка электронной презентации на тему «Великие ученые-механики»
Тема 1.2. Плоская система сходящихся сил (ПССС)
Лекция 2
Тема 1.2. Плоская система сходящихся сил (ПССС)
Лекция 2
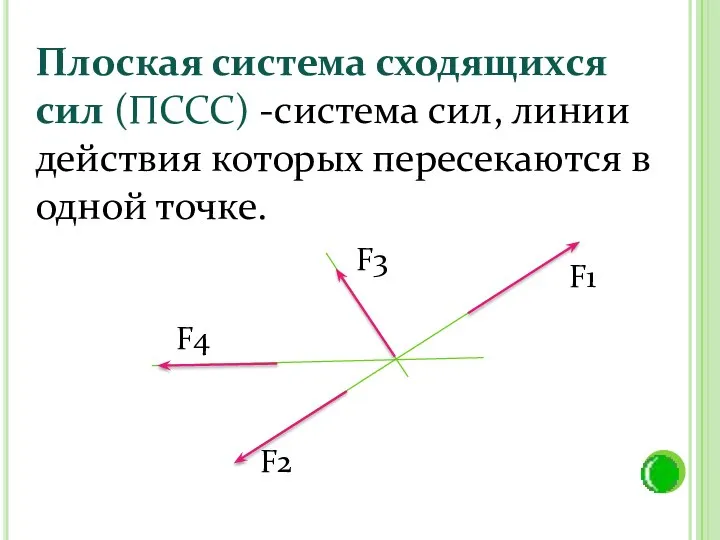
Плоская система сходящихся сил (ПССС) -система сил, линии
действия которых пересекаются
Плоская система сходящихся сил (ПССС) -система сил, линии
действия которых пересекаются
F1
F4
F3
F2
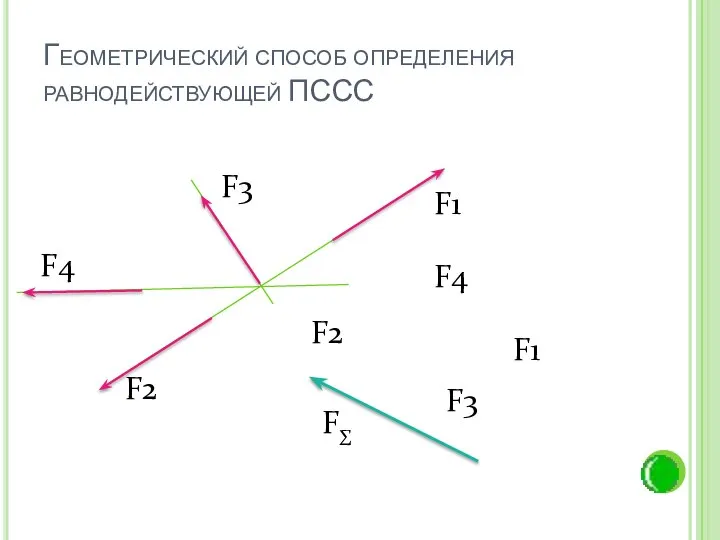
Геометрический способ определения равнодействующей ПССС
F3
F4
F1
F2
FΣ
F1
F4
F3
F2
Геометрический способ определения равнодействующей ПССС
F3
F4
F1
F2
FΣ
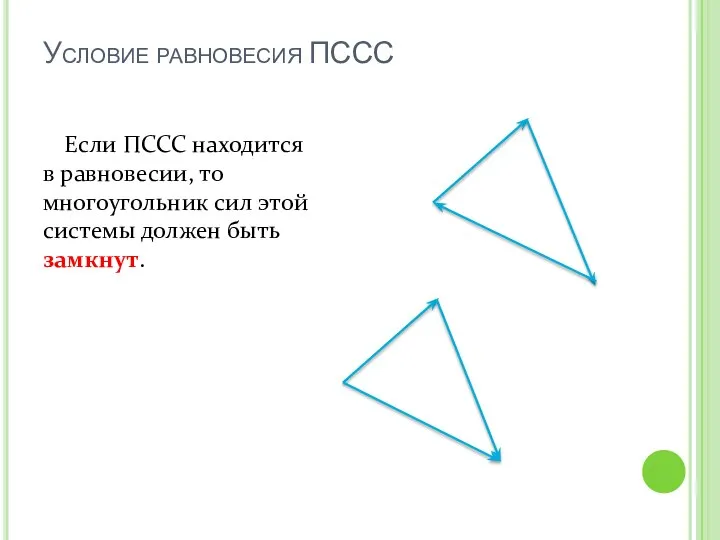
Если ПССС находится в равновесии, то многоугольник сил этой системы должен
Если ПССС находится в равновесии, то многоугольник сил этой системы должен
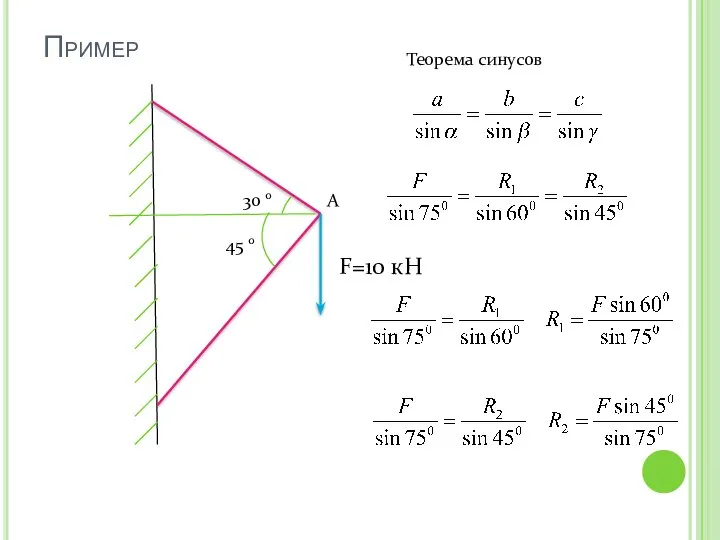
Пример
F=10 кН
30 0
45 0
А
Теорема синусов
Пример
F=10 кН
30 0
45 0
А
Теорема синусов
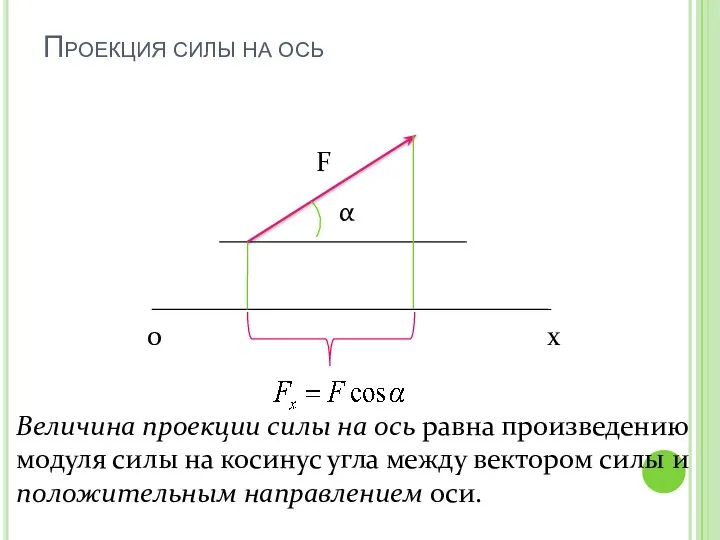
Проекция силы на ось
α
F
0
x
Величина проекции силы на ось равна произведению
модуля
Проекция силы на ось
α
F
0
x
Величина проекции силы на ось равна произведению
модуля
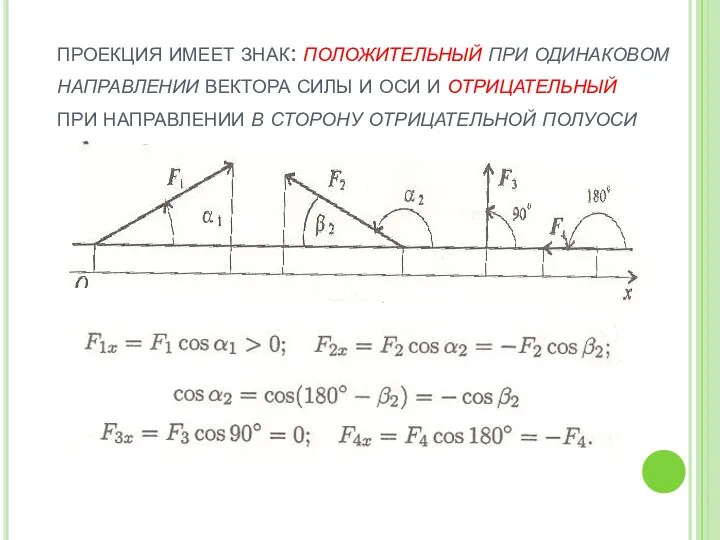
проекция имеет знак: положительный при одинаковом направлении вектора силы и оси
проекция имеет знак: положительный при одинаковом направлении вектора силы и оси
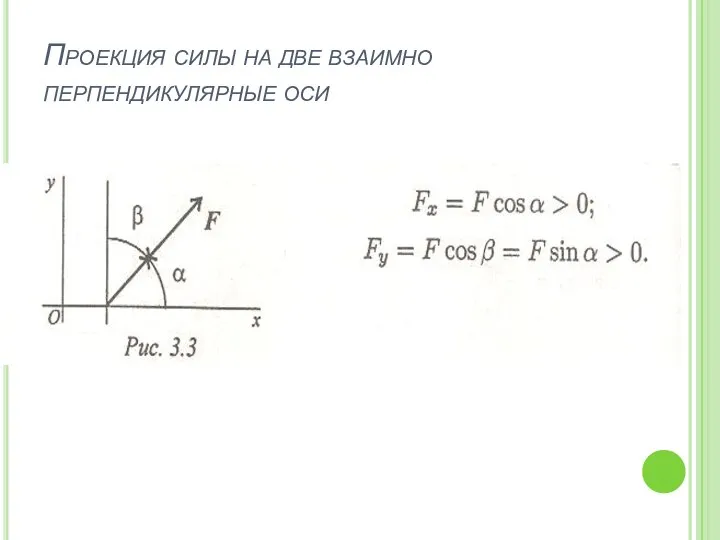
Проекция силы на две взаимно
перпендикулярные оси
Проекция силы на две взаимно
перпендикулярные оси
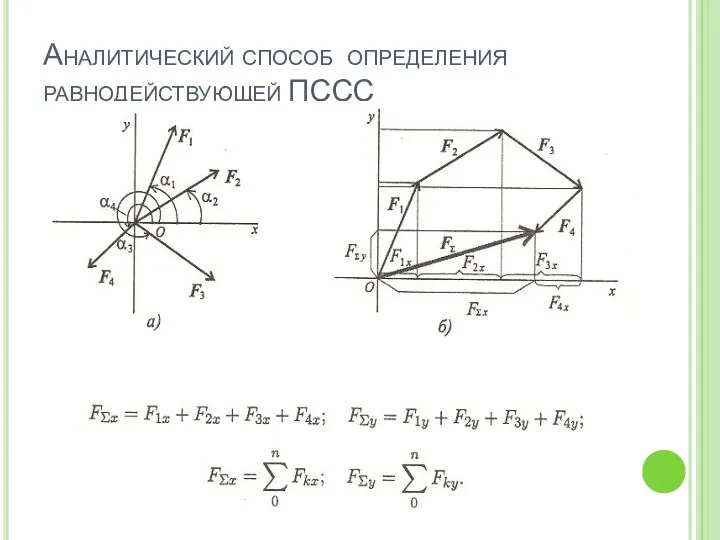
Аналитический способ определения равнодействующей ПССС
Аналитический способ определения равнодействующей ПССС
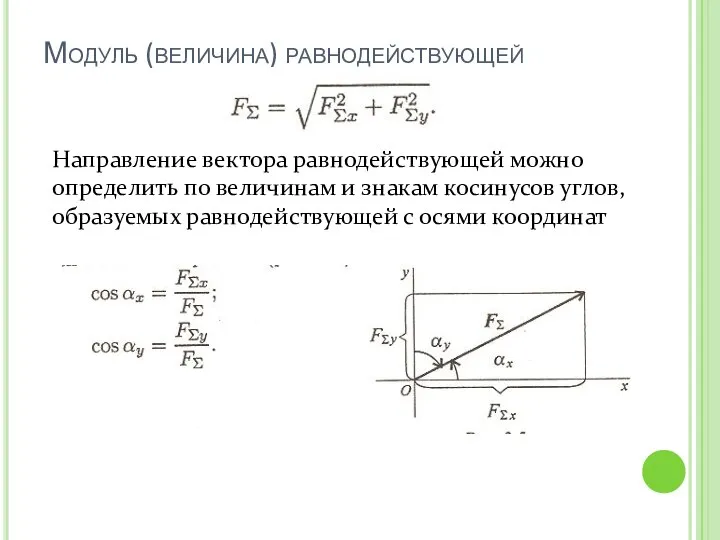
Модуль (величина) равнодействующей
Направление вектора равнодействующей можно определить по величинам и знакам
Модуль (величина) равнодействующей
Направление вектора равнодействующей можно определить по величинам и знакам
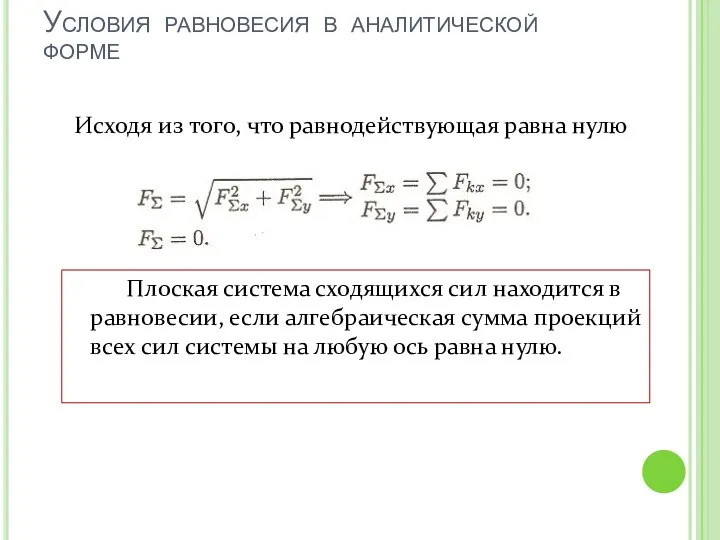
Условия равновесия в аналитической форме
Плоская система сходящихся сил находится в равновесии,
Условия равновесия в аналитической форме
Плоская система сходящихся сил находится в равновесии,
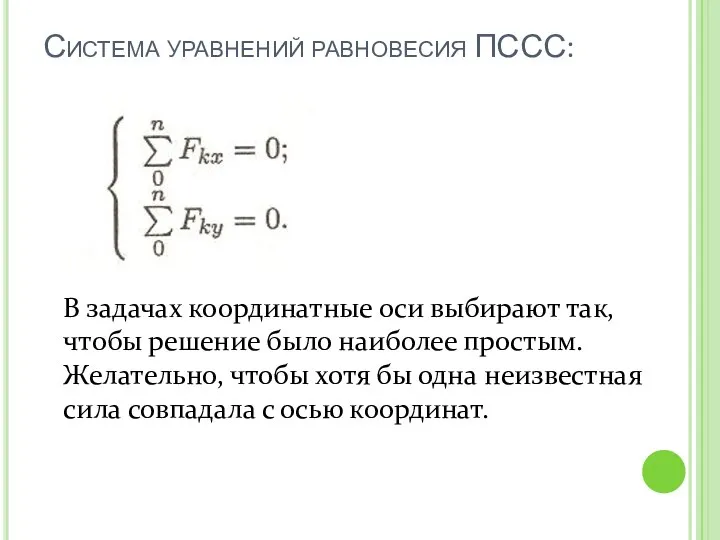
Система уравнений равновесия ПССС:
В задачах координатные оси выбирают так, чтобы решение
Система уравнений равновесия ПССС:
В задачах координатные оси выбирают так, чтобы решение

Пример 1. Определить величины и знаки проекций
Пример 2. Определить величину
Пример 1. Определить величины и знаки проекций
Пример 2. Определить величину
Самостоятельная работа обучающихся —
выполнение расчетно-графической работы по теме «Плоская система
Самостоятельная работа обучающихся —
выполнение расчетно-графической работы по теме «Плоская система
Тема 1.3. Пара сил и момент силы относительно точки
Лекция 3
Тема 1.3. Пара сил и момент силы относительно точки
Лекция 3
Пара сил -
система двух сил, равных по модулю, параллельных и направленных
Пара сил -
система двух сил, равных по модулю, параллельных и направленных
M(F;F/ ) = F∙а; М > 0
Момент пары сил численно равен
M(F;F/ ) = F∙а; М > 0
Момент пары сил численно равен
Свойства пар
(без доказательств):
Пару сил можно перемещать в плоскости ее действия.
Эквивалентность
Свойства пар
(без доказательств):
Пару сил можно перемещать в плоскости ее действия.
Эквивалентность
Свойства пар
(без доказательств):
Сложение пар сил. Систему пар сил можно заменить
Свойства пар
(без доказательств):
Сложение пар сил. Систему пар сил можно заменить
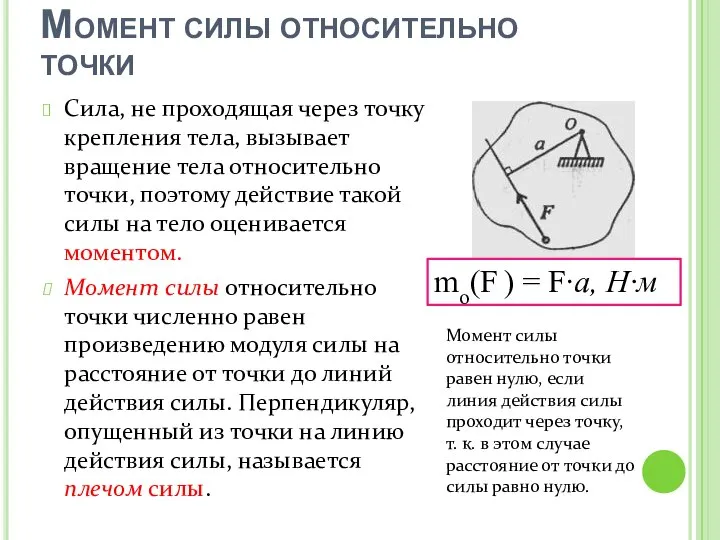
Момент силы относительно точки
Сила, не проходящая через точку крепления тела, вызывает
Момент силы относительно точки
Сила, не проходящая через точку крепления тела, вызывает
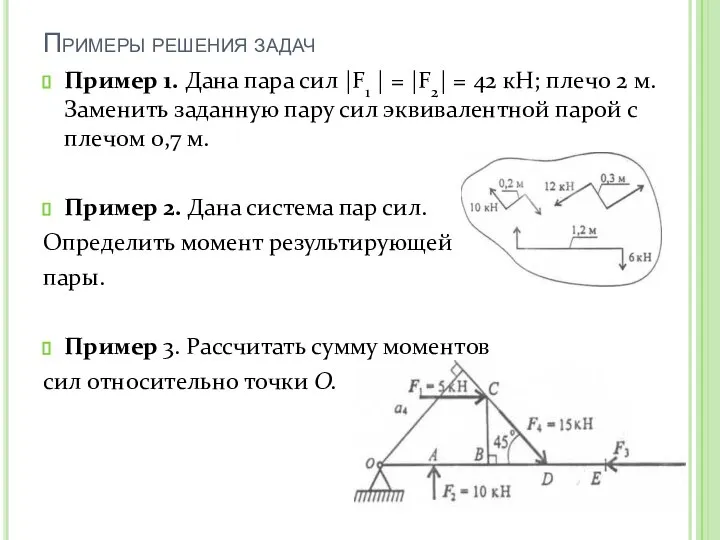
Примеры решения задач
Пример 1. Дана пара сил |F1 | = |F2|
Примеры решения задач
Пример 1. Дана пара сил |F1 | = |F2|
Самостоятельная работа обучающихся —
решение задач по теме «Пара сил и
Самостоятельная работа обучающихся —
решение задач по теме «Пара сил и
Основные понятия:
Свободное тело - тело, перемещение которого ничем не ограничено.
Несвободное тело
Основные понятия:
Свободное тело - тело, перемещение которого ничем не ограничено.
Несвободное тело

Виды связей:
Идеально гладкая поверхность
R
R
R
А
А
А
Виды связей:
Идеально гладкая поверхность
R
R
R
А
А
А
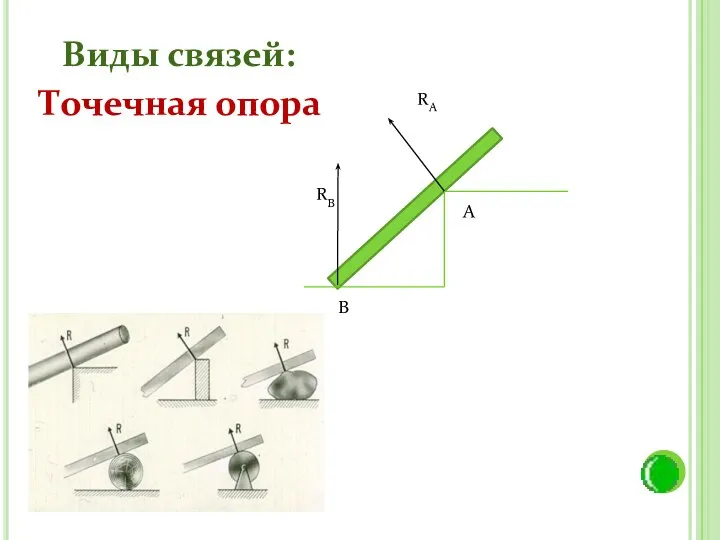
Виды связей:
Точечная опора
RВ
RА
А
В
Виды связей:
Точечная опора
RВ
RА
А
В
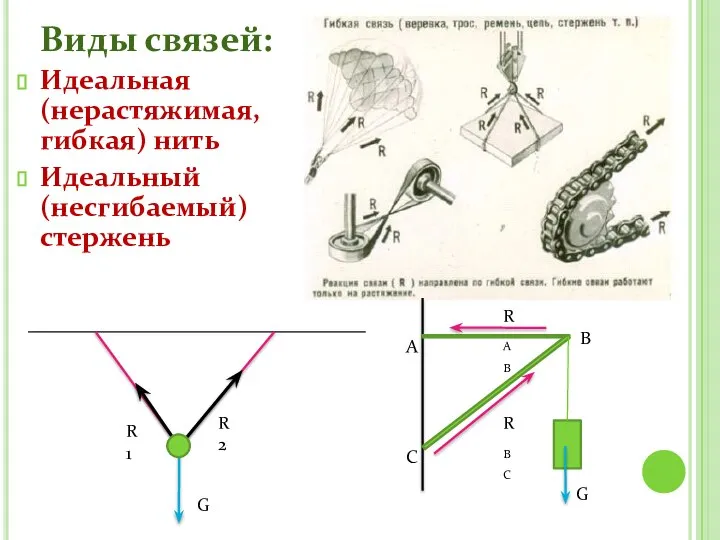
Виды связей:
Идеальная (нерастяжимая, гибкая) нить
Идеальный (несгибаемый) стержень
G
Виды связей:
Идеальная (нерастяжимая, гибкая) нить
Идеальный (несгибаемый) стержень
G
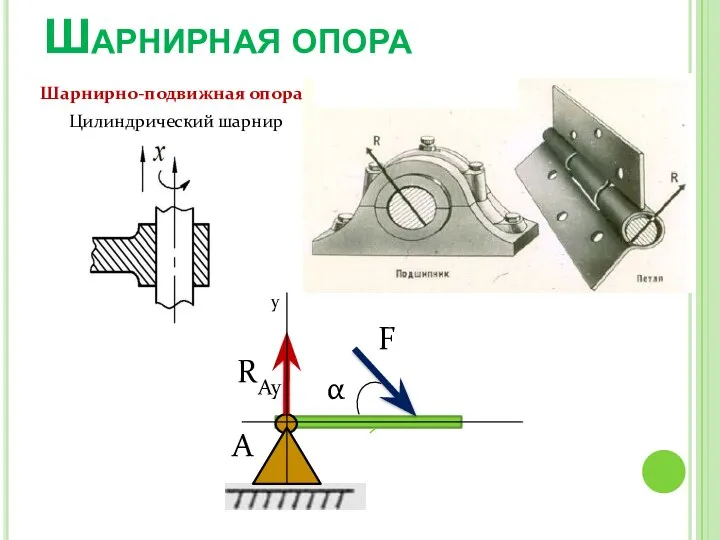
Шарнирная опора
Цилиндрический шарнир
Шарнирно-подвижная опора
Шарнирная опора
Цилиндрический шарнир
Шарнирно-подвижная опора
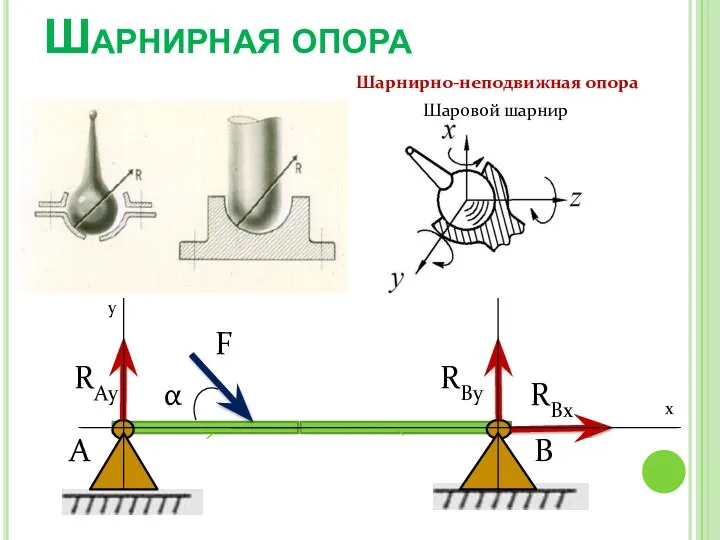
Шарнирная опора
Шаровой шарнир
Шарнирно-неподвижная опора
Шарнирная опора
Шаровой шарнир
Шарнирно-неподвижная опора
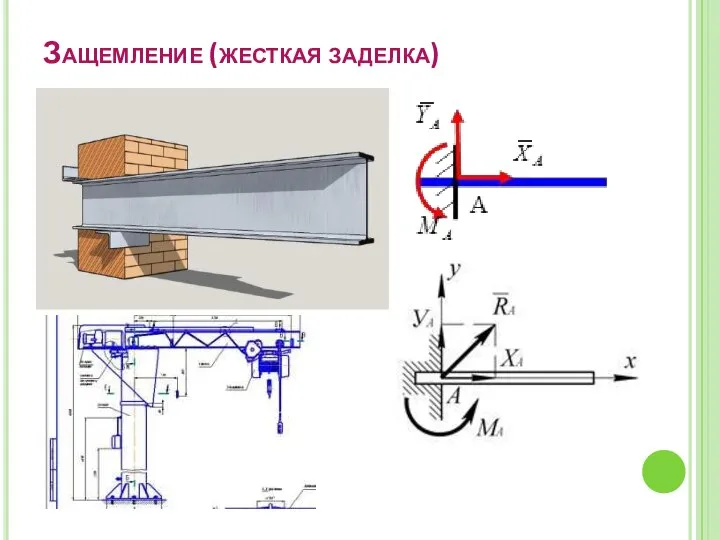
Защемление (жесткая заделка)
Защемление (жесткая заделка)
Тема 1.4. Плоская система произвольно расположенных сил (ПСПРС)
Лекция 4
Тема 1.4. Плоская система произвольно расположенных сил (ПСПРС)
Лекция 4
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее
Приведение к точке плоской системы произвольно расположенных сил (ПСПРС)
О – точка
Приведение к точке плоской системы произвольно расположенных сил (ПСПРС)
О – точка
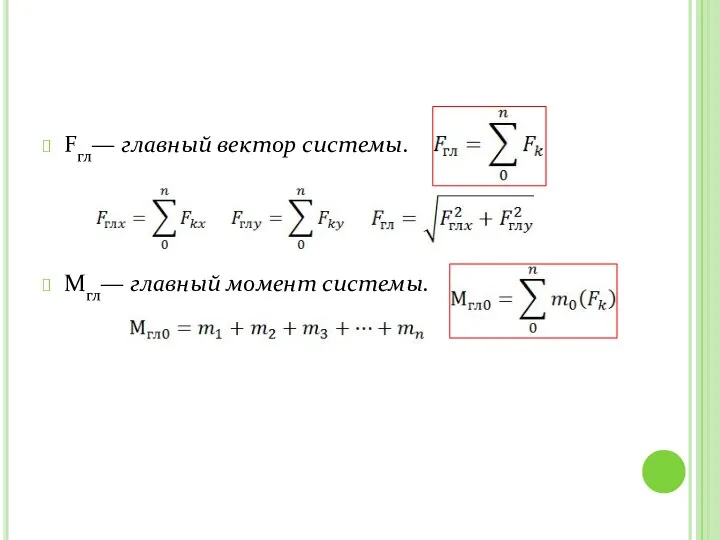
Fгл— главный вектор системы.
Мгл— главный момент системы.
Fгл— главный вектор системы.
Мгл— главный момент системы.
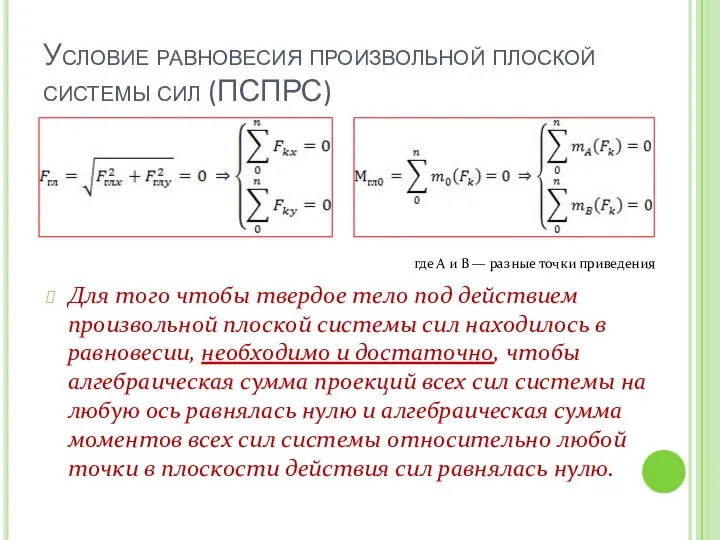
Условие равновесия произвольной плоской системы сил (ПСПРС)
где А и В
Условие равновесия произвольной плоской системы сил (ПСПРС)
где А и В
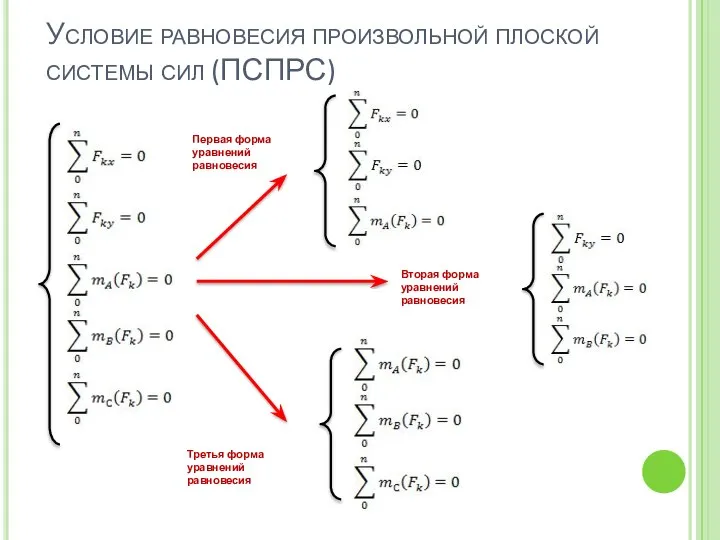
Условие равновесия произвольной плоской системы сил (ПСПРС)
Первая форма уравнений равновесия
Вторая форма
Условие равновесия произвольной плоской системы сил (ПСПРС)
Первая форма уравнений равновесия
Вторая форма
Тема 1.4. Балочные системы
Лекция 5
Тема 1.4. Балочные системы
Лекция 5
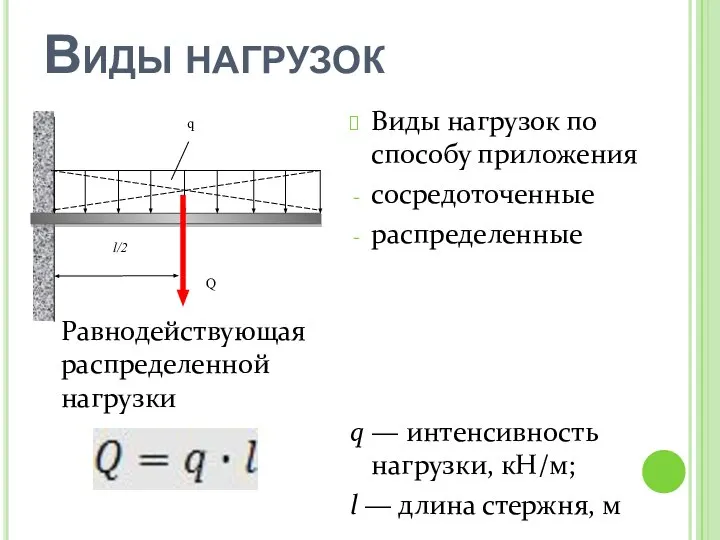
Виды нагрузок
Виды нагрузок по способу приложения
сосредоточенные
распределенные
q — интенсивность нагрузки, кН/м;
Виды нагрузок
Виды нагрузок по способу приложения
сосредоточенные
распределенные
q — интенсивность нагрузки, кН/м;

Балка – конструктивная деталь в виде прямого бруса, закрепленная на опорах
Балка – конструктивная деталь в виде прямого бруса, закрепленная на опорах
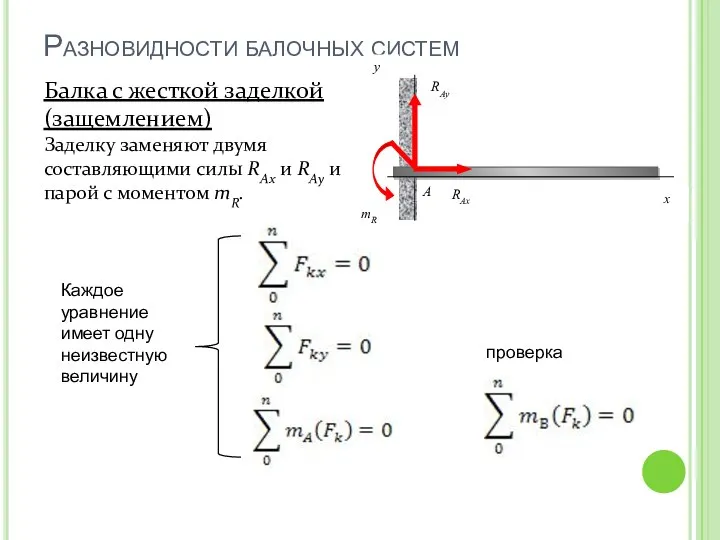
Разновидности балочных систем
Балка с жесткой заделкой (защемлением)
Заделку заменяют двумя составляющими силы
Разновидности балочных систем
Балка с жесткой заделкой (защемлением)
Заделку заменяют двумя составляющими силы
 Температура и тепловое равновесие. Абсолютная температура
Температура и тепловое равновесие. Абсолютная температура Опыты
Опыты Кристалдану үдерісі
Кристалдану үдерісі Инфракрасное и ультрафиолетовое излучения
Инфракрасное и ультрафиолетовое излучения Продолжение молекулярной физики
Продолжение молекулярной физики Эксплуатация топливной системы главных двигателей судна проекта 428 - 2 ОТ - 2100
Эксплуатация топливной системы главных двигателей судна проекта 428 - 2 ОТ - 2100 Постоянный и переменный электрический ток. Электрические свойства биологических тканей
Постоянный и переменный электрический ток. Электрические свойства биологических тканей Найважливіші відкриття Ніколи Тесли
Найважливіші відкриття Ніколи Тесли Тиск газів і рідин
Тиск газів і рідин Почему в морской воде плавать легче, чем в пресной?
Почему в морской воде плавать легче, чем в пресной? Физико-технические основы электроэнергетики. Лекция 11
Физико-технические основы электроэнергетики. Лекция 11 Эллиптическое движение
Эллиптическое движение Механическая техника
Механическая техника Измерение радиусов кривизны сферических поверхностей на сферометре, с помощью автоколлимационных микроскопа и зрительной трубы
Измерение радиусов кривизны сферических поверхностей на сферометре, с помощью автоколлимационных микроскопа и зрительной трубы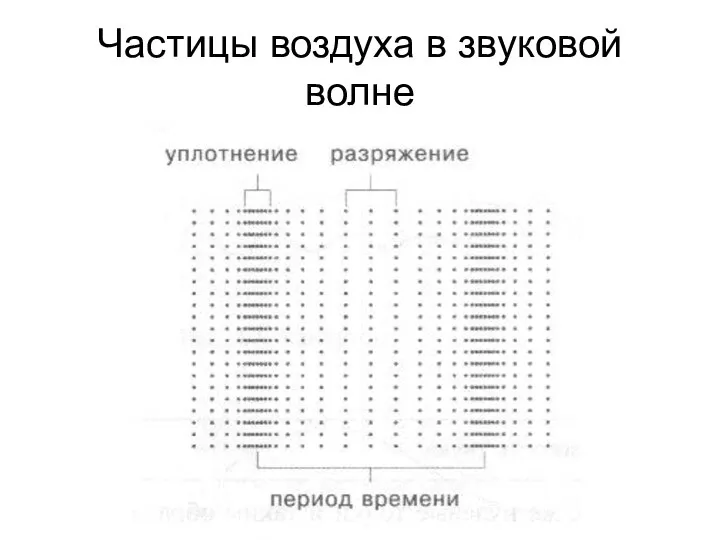 Частицы воздуха в звуковой волне
Частицы воздуха в звуковой волне  Взаимодействие тел. Масса тела. Единицы массы
Взаимодействие тел. Масса тела. Единицы массы Қанның тамырлар бойымен қозғалысының гемодинамикалық заңдылықтары. Қанның реологиялық қасиеттері
Қанның тамырлар бойымен қозғалысының гемодинамикалық заңдылықтары. Қанның реологиялық қасиеттері Возникновение атомистической гипотезы строения вещества и ее экспериментальные доказательства. Идеальный газ
Возникновение атомистической гипотезы строения вещества и ее экспериментальные доказательства. Идеальный газ Парообразование и конденсация
Парообразование и конденсация Линзы. Построение изображений, даваемых линзой
Линзы. Построение изображений, даваемых линзой Механічна енергія. Види енергії
Механічна енергія. Види енергії Методы и средства измерения полосы пропускания и дисперсии оптических волокон
Методы и средства измерения полосы пропускания и дисперсии оптических волокон Согласование волноводов. Неподвижные соединения. Вращающееся соединение
Согласование волноводов. Неподвижные соединения. Вращающееся соединение Элементы гидродинамики и теплопереноса в гелии
Элементы гидродинамики и теплопереноса в гелии Основные свойства синергетических систем
Основные свойства синергетических систем Датчика изгиба (Роборука)
Датчика изгиба (Роборука) Законы постоянного тока
Законы постоянного тока Силы в природе. Гравитационные силы
Силы в природе. Гравитационные силы