- Предмет физики

Содержание
- 2. Основным методом исследования в физике является опыт. В результате обобщения опытных фактов устанавливаются физические законы в
- 3. Механика делится на 3 части: 1) кинематику - изучает движение тел, отвлекаясь от причин, его вызывающих
- 4. 2. Кинематика материальной точки 2.1 Понятия системы отсчета и материальной точки Ньютон считал пространство и время
- 5. Согласно специальной теории относительности пространство и время неразрывно связаны друг с другом и образуют единое 4-х
- 6. Для описания движения какого-либо тела необходимо указать по отношению к какому телу рассматривается его движение. Для
- 7. Описать движение тела – значит указать для каждого момента времени положение тела в пространстве и его
- 8. Для описания движения тел используют приближения. Часто можно пренебречь размерами тела. Тело, размерами которого в условиях
- 9. Всякое движение можно разложить на два основных вида движения – поступательное и вращательное. Поступательное движение -
- 10. При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той
- 11. Для описания движения вводят систему координат, которая связана с телами, образующими систему отсчета. В прямоугольной декартовой
- 12. 2.2 Перемещение и скорость материальной точки При своем движении материальная точка описывает некоторую линию, которая называется
- 13. Пусть частица движется вдоль некоторой траектории и за время t перемещается из точки 1 с радиус-вектором
- 14. Быстроту и направление движения частицы характеризует векторная величина – скорость. Направление скорости совпадает с направлением вектора
- 15. 2.3 Ускорение материальной точки При неравномерном движении скорость частицы может меняться как по величине, так и
- 16. Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим в (2.3.1) формулу для скорости получим
- 17. Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено по касательной к траектории и характеризует
- 18. С учетом выражений для тангенциального и нормального ускорений, вектор полного ускорения принимает окончательный вид Поскольку ,
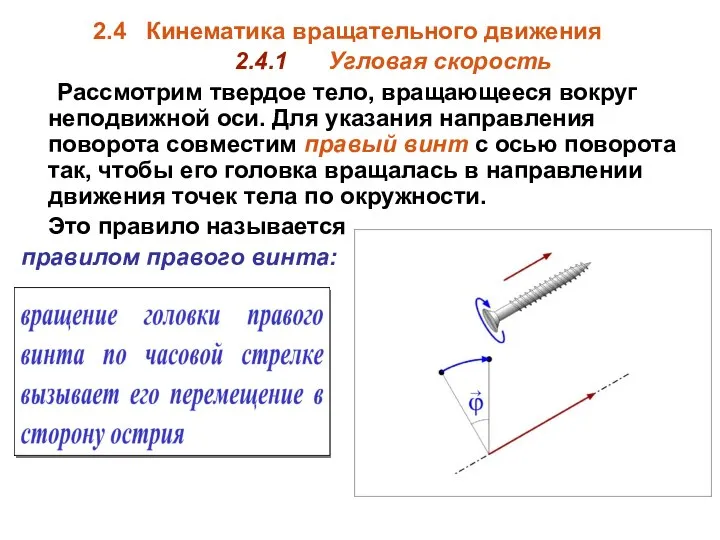
- 19. 2.4 Кинематика вращательного движения 2.4.1 Угловая скорость Рассмотрим твердое тело, вращающееся вокруг неподвижной оси. Для указания
- 20. Пусть некоторая точка тела движется по окружности радиуса R и за время Δ t поворачивается на
- 21. Угловой скоростью называется величина, равная первой производной угла поворота по времени (2.4.1) Угловая скорость направлена вдоль
- 22. Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать периодом и частотой вращения. Период вращения
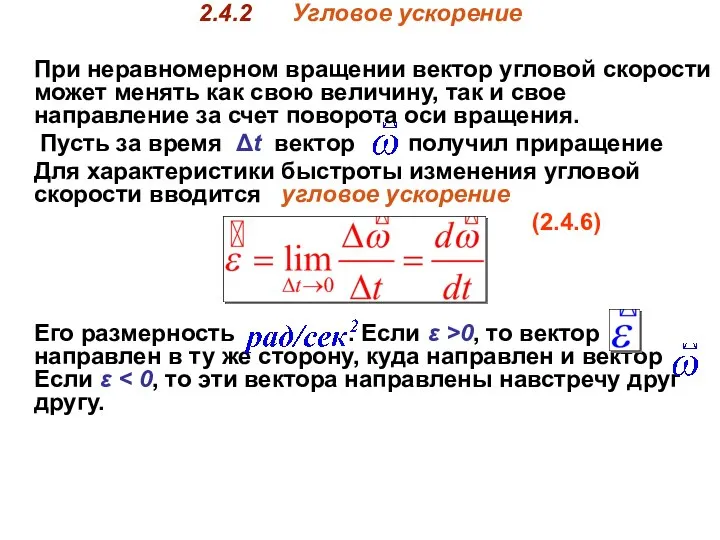
- 23. 2.4.2 Угловое ускорение При неравномерном вращении вектор угловой скорости может менять как свою величину, так и
- 24. 3. Динамика материальной точки В основе классической механики лежат три закона динамики, сформулированные Ньютоном в 1687
- 25. Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и формулируется следующим образом: всякое тело
- 26. Для количественного описания внешних воздействий вводится понятие силы. Сила – это векторная величина, выступающая мерой механического
- 27. Второй закон Ньютона, также как и первый закон, справедлив только в инерциальных системах отсчета. В классической
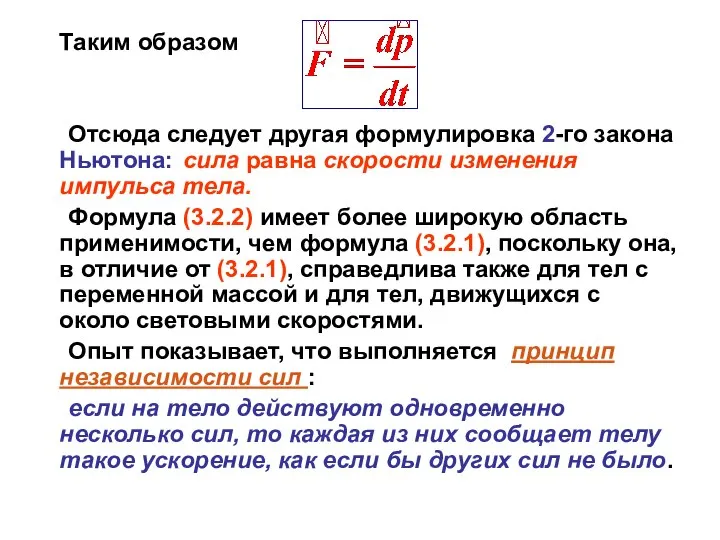
- 28. Таким образом Отсюда следует другая формулировка 2-го закона Ньютона: сила равна cкорости изменения импульса тела. Формула
- 29. Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе, которая массе 1 кг сообщает
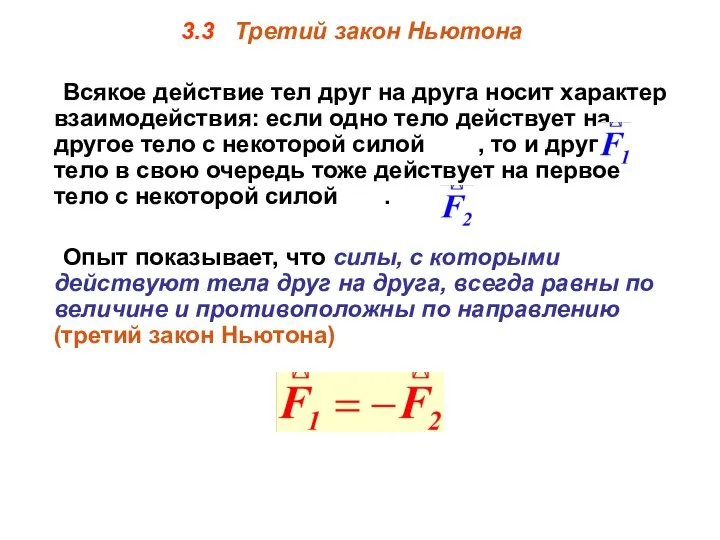
- 30. 3.3 Третий закон Ньютона Всякое действие тел друг на друга носит характер взаимодействия: если одно тело
- 31. 4. Динамика вращательного движения твердого тела Твердое тело – это система материальных точек, расстояния между которыми
- 32. Для системы материальных точек момент инерции равен сумме моментов инерции отдельных точек Если масса распределена непрерывно
- 33. Моменты инерции : 1) стержня длиной l (вокруг оси, проходящей через середину стержня) (4.1.3b) 2) шара
- 34. 4.2 Теорема Штейнера Найдем момент инерции тела относительно произвольной оси. Пусть ось С проходит через центр
- 35. Квадрат расстояния элементарной массы до оси С ′ равен Поэтому момент инерции тела относительно оси С
- 36. 4.3 Кинетическая энергия вращающегося тела Кинетическая энергия вращающегося тела равна сумме кинетических энергий его частей где
- 37. Если тело участвует в составном движении, то его кинетическая энергия складывается из энергии поступательного движения и
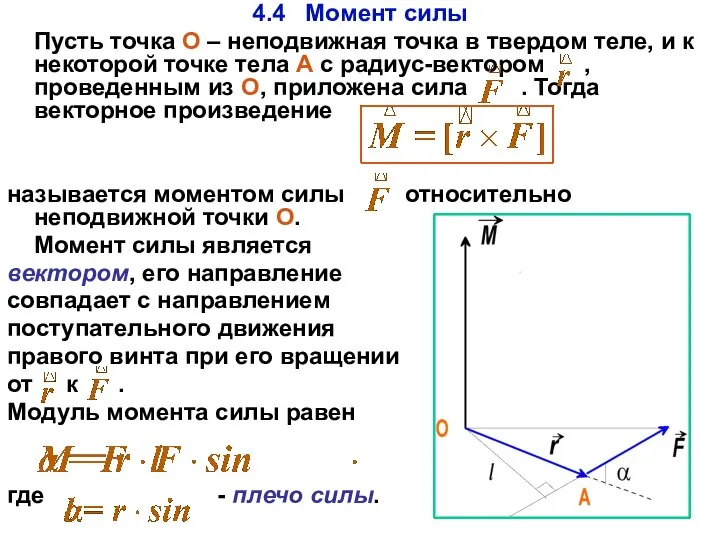
- 38. 4.4 Момент силы Пусть точка О – неподвижная точка в твердом теле, и к некоторой точке
- 39. 4.5 Момент импульса Моментом импульса материальной точки А относительно неподвижной точки О называется вектор, равный где
- 41. Скачать презентацию
Основным методом исследования в физике является опыт. В результате обобщения
Основным методом исследования в физике является опыт. В результате обобщения

Механика делится на 3 части:
1) кинематику - изучает движение тел, отвлекаясь
Механика делится на 3 части:
1) кинематику - изучает движение тел, отвлекаясь
2. Кинематика материальной точки
2.1 Понятия системы отсчета и материальной точки
Ньютон
2. Кинематика материальной точки
2.1 Понятия системы отсчета и материальной точки
Ньютон
Согласно специальной теории относительности пространство и время неразрывно связаны друг с
Согласно специальной теории относительности пространство и время неразрывно связаны друг с
Для описания движения какого-либо тела необходимо указать по отношению к какому
Для описания движения какого-либо тела необходимо указать по отношению к какому
Описать движение тела – значит указать для каждого момента времени положение
Описать движение тела – значит указать для каждого момента времени положение
Для описания движения тел используют приближения. Часто можно пренебречь размерами тела.
Для описания движения тел используют приближения. Часто можно пренебречь размерами тела.
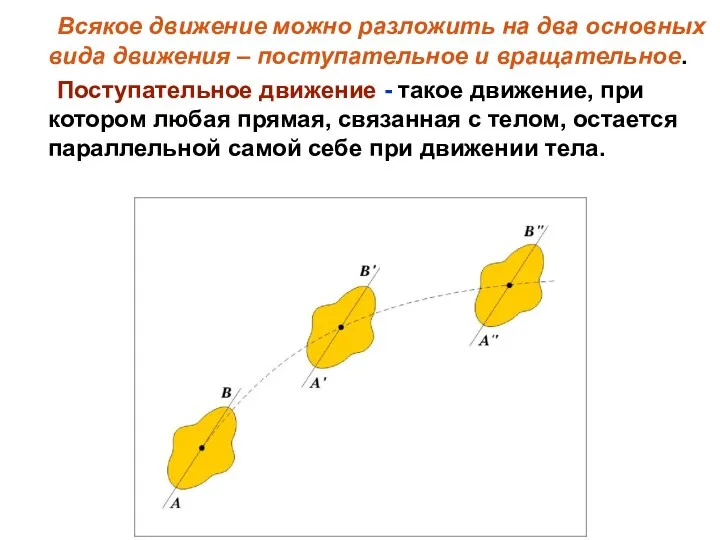
Всякое движение можно разложить на два основных вида движения – поступательное
Всякое движение можно разложить на два основных вида движения – поступательное
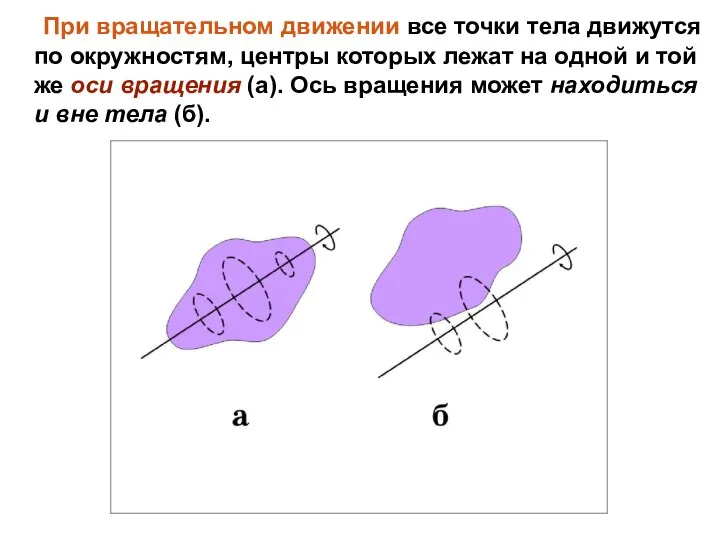
При вращательном движении все точки тела движутся по окружностям, центры которых
При вращательном движении все точки тела движутся по окружностям, центры которых
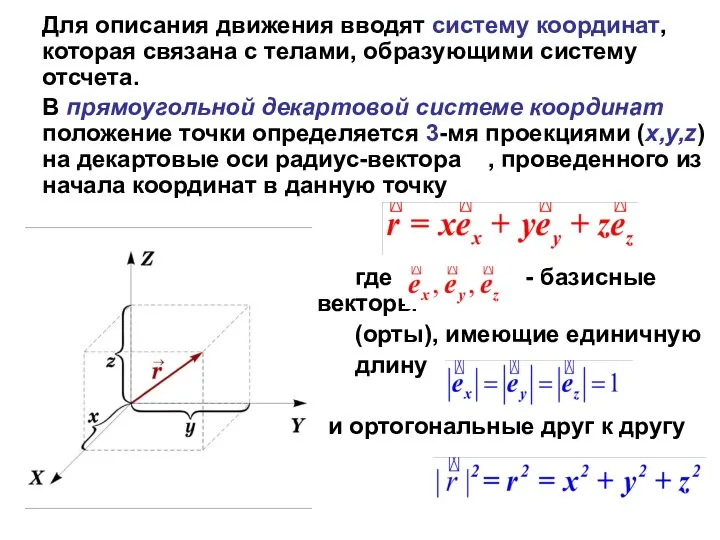
Для описания движения вводят систему координат, которая связана с телами, образующими
Для описания движения вводят систему координат, которая связана с телами, образующими
2.2 Перемещение и скорость материальной точки
При своем движении материальная точка описывает
2.2 Перемещение и скорость материальной точки
При своем движении материальная точка описывает

Пусть частица движется вдоль некоторой траектории и за время t перемещается
Пусть частица движется вдоль некоторой траектории и за время t перемещается
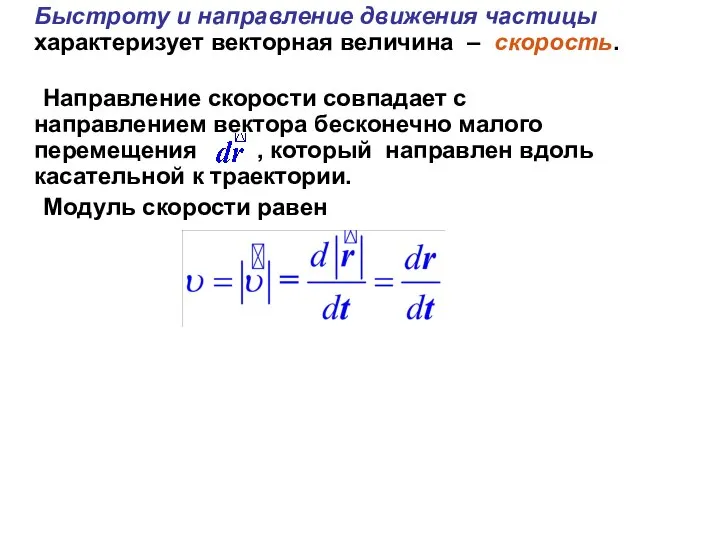
Быстроту и направление движения частицы характеризует векторная величина – скорость.
Направление скорости
Быстроту и направление движения частицы характеризует векторная величина – скорость.
Направление скорости
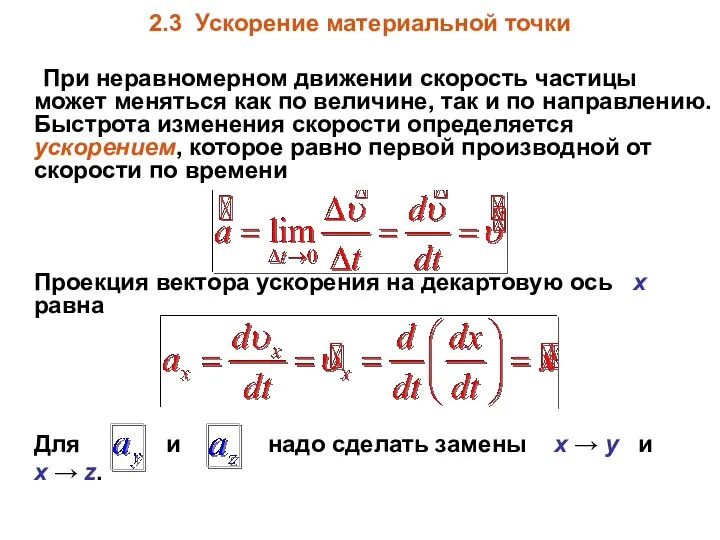
2.3 Ускорение материальной точки
При неравномерном движении скорость частицы может меняться как
2.3 Ускорение материальной точки
При неравномерном движении скорость частицы может меняться как

Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим в
Выделим из ускорения нормальную и тангенциальную составляющие. Для этого подставим в
Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено по
Тангенциальное ускорение направлено вдоль единичного вектора , поэтому оно направлено по
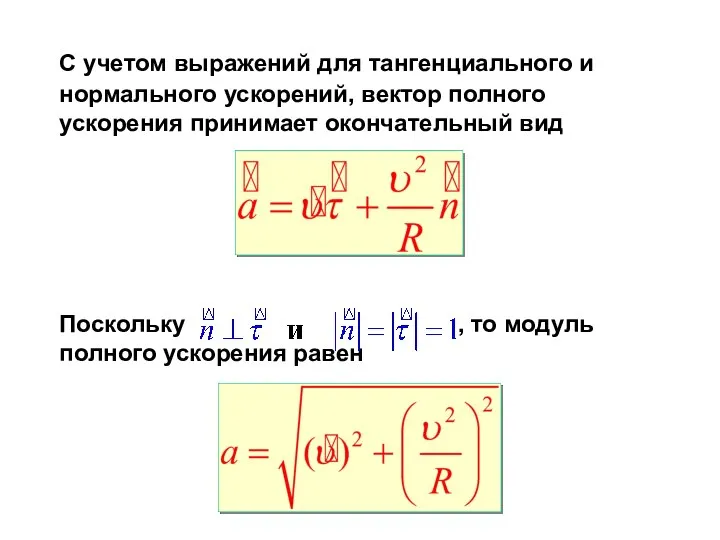
С учетом выражений для тангенциального и нормального ускорений, вектор полного ускорения
С учетом выражений для тангенциального и нормального ускорений, вектор полного ускорения
2.4 Кинематика вращательного движения
2.4.1 Угловая скорость
Рассмотрим твердое тело, вращающееся вокруг
2.4 Кинематика вращательного движения
2.4.1 Угловая скорость
Рассмотрим твердое тело, вращающееся вокруг
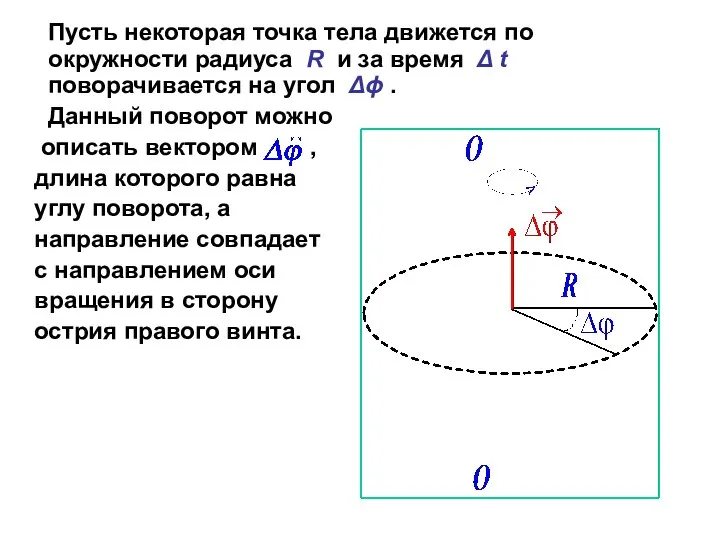
Пусть некоторая точка тела движется по окружности радиуса R и за
Пусть некоторая точка тела движется по окружности радиуса R и за
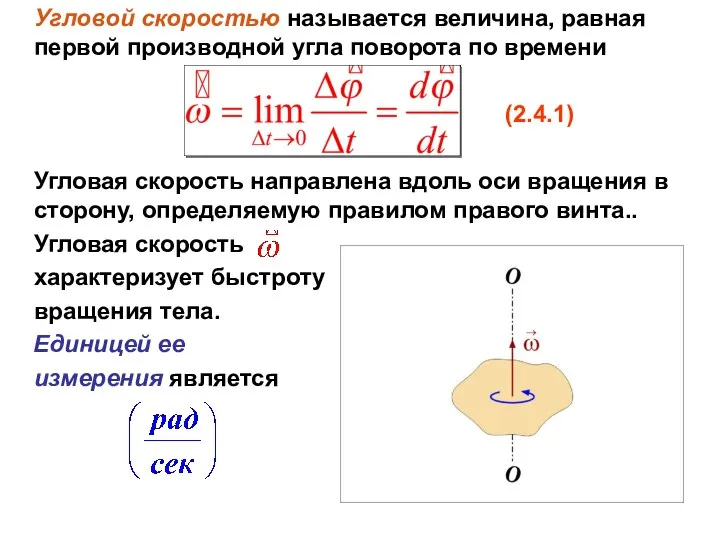
Угловой скоростью называется величина, равная первой производной угла поворота по времени
Угловой скоростью называется величина, равная первой производной угла поворота по времени
Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать периодом
Вращение с постоянной угловой скоростью называется равномерным. Его можно охарактеризовать периодом
2.4.2 Угловое ускорение
При неравномерном вращении вектор угловой скорости может менять
2.4.2 Угловое ускорение
При неравномерном вращении вектор угловой скорости может менять

3. Динамика материальной точки
В основе классической механики лежат три закона динамики,
3. Динамика материальной точки
В основе классической механики лежат три закона динамики,
Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и
Итак, первый закон Ньютона (закон инерции) утверждает существование инерциальных систем и

Для количественного описания внешних воздействий вводится понятие силы.
Сила – это векторная
Для количественного описания внешних воздействий вводится понятие силы.
Сила – это векторная
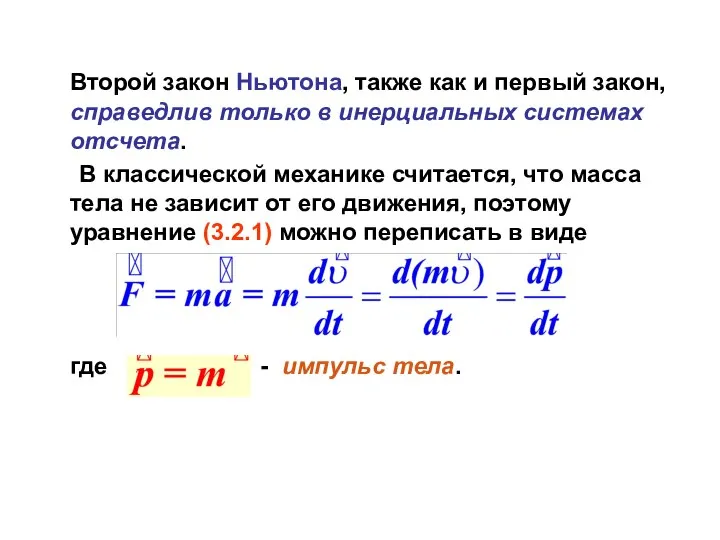
Второй закон Ньютона, также как и первый закон, справедлив только в
Второй закон Ньютона, также как и первый закон, справедлив только в
Таким образом
Отсюда следует другая формулировка 2-го закона Ньютона: сила равна
Таким образом
Отсюда следует другая формулировка 2-го закона Ньютона: сила равна
Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе,
Единицей измерения силы в системе СИ (метр-секунда-килограмм) является ньютон, равный силе,
3.3 Третий закон Ньютона
Всякое действие тел друг на друга носит характер
3.3 Третий закон Ньютона
Всякое действие тел друг на друга носит характер
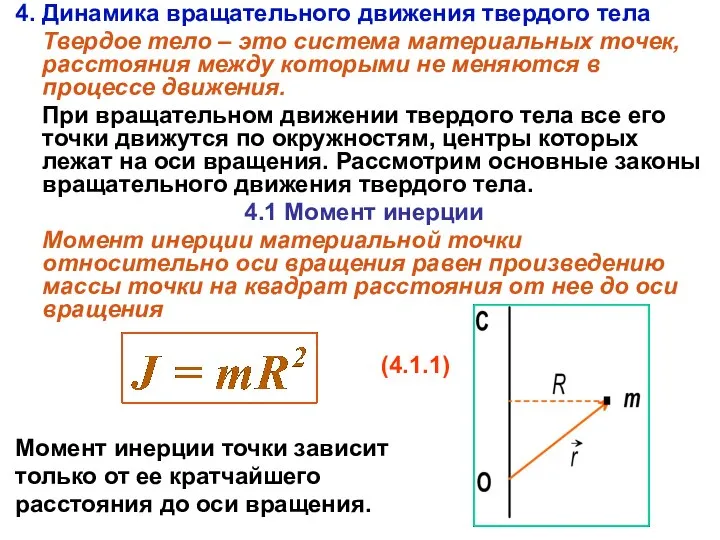
4. Динамика вращательного движения твердого тела
Твердое тело – это система материальных
4. Динамика вращательного движения твердого тела
Твердое тело – это система материальных
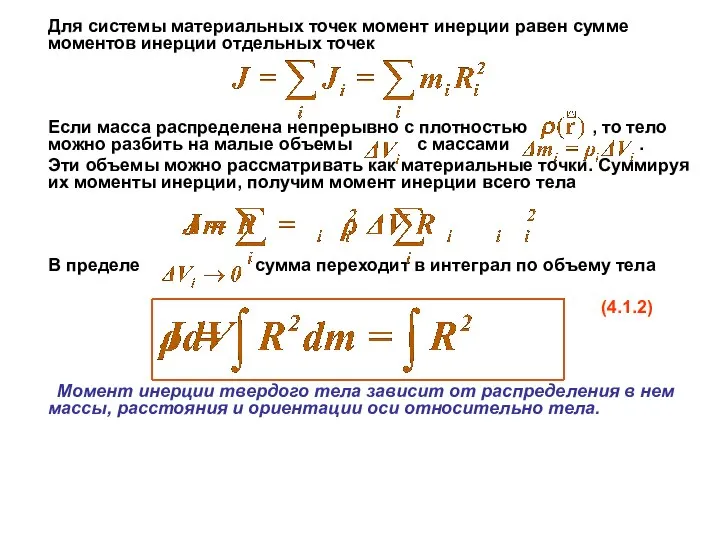
Для системы материальных точек момент инерции равен сумме моментов инерции отдельных
Для системы материальных точек момент инерции равен сумме моментов инерции отдельных
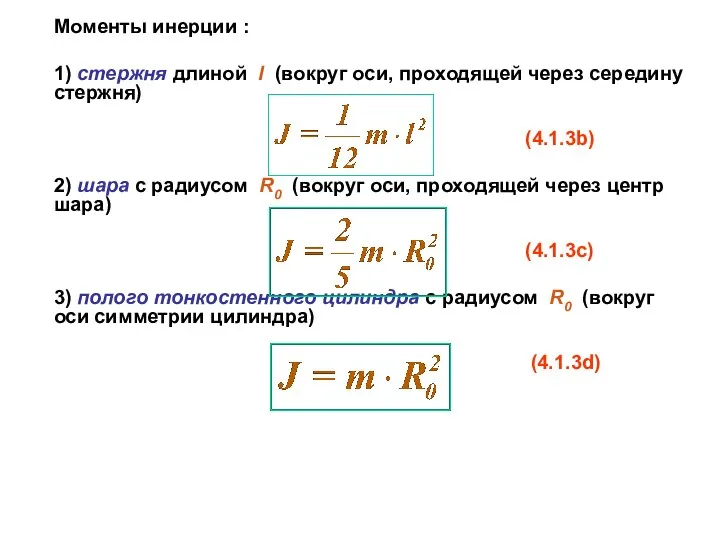
Моменты инерции :
1) стержня длиной l (вокруг оси, проходящей через середину
Моменты инерции :
1) стержня длиной l (вокруг оси, проходящей через середину
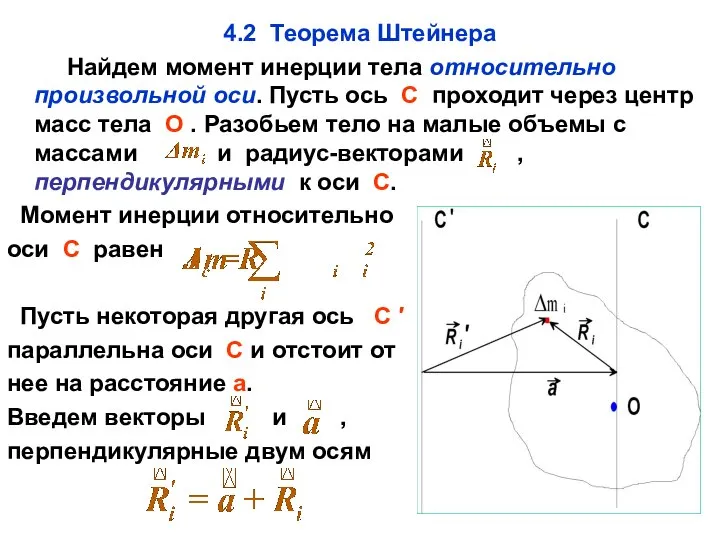
4.2 Теорема Штейнера
Найдем момент инерции тела относительно произвольной оси. Пусть
4.2 Теорема Штейнера
Найдем момент инерции тела относительно произвольной оси. Пусть
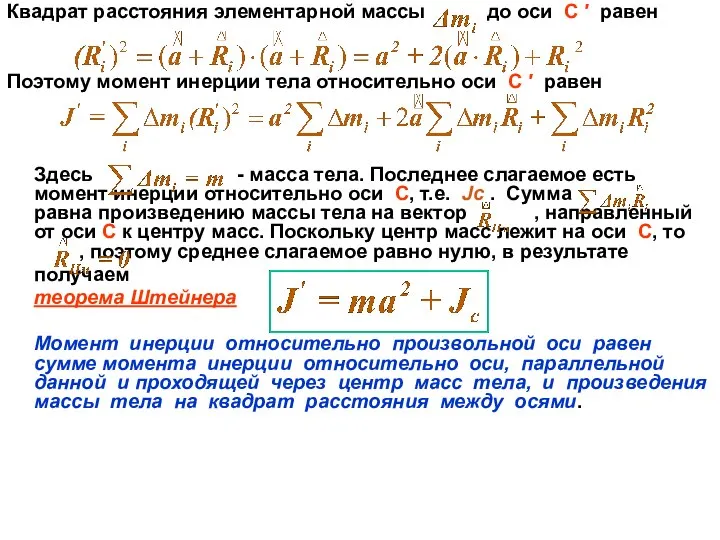
Квадрат расстояния элементарной массы до оси С ′ равен
Поэтому момент инерции
Квадрат расстояния элементарной массы до оси С ′ равен
Поэтому момент инерции
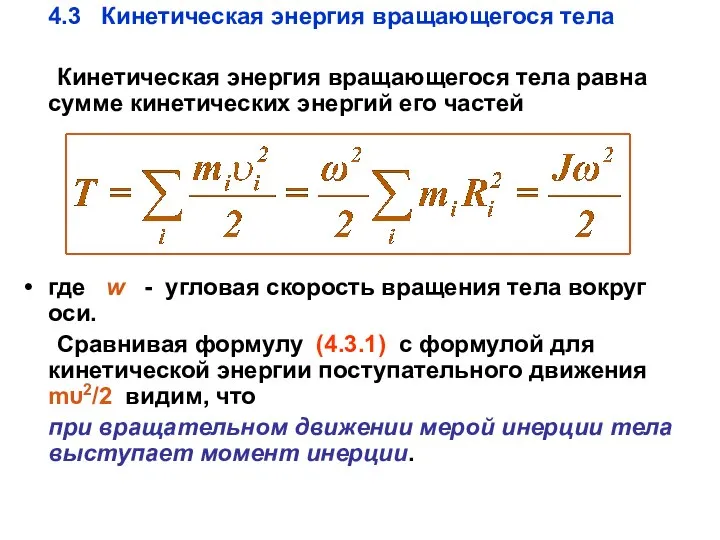
4.3 Кинетическая энергия вращающегося тела
Кинетическая энергия вращающегося тела равна сумме кинетических
4.3 Кинетическая энергия вращающегося тела
Кинетическая энергия вращающегося тела равна сумме кинетических
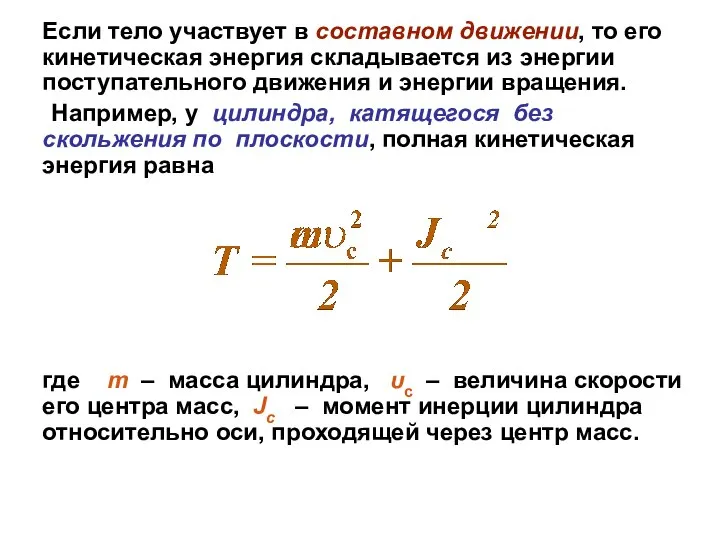
Если тело участвует в составном движении, то его кинетическая энергия складывается
Если тело участвует в составном движении, то его кинетическая энергия складывается
4.4 Момент силы
Пусть точка О – неподвижная точка в твердом теле,
4.4 Момент силы
Пусть точка О – неподвижная точка в твердом теле,
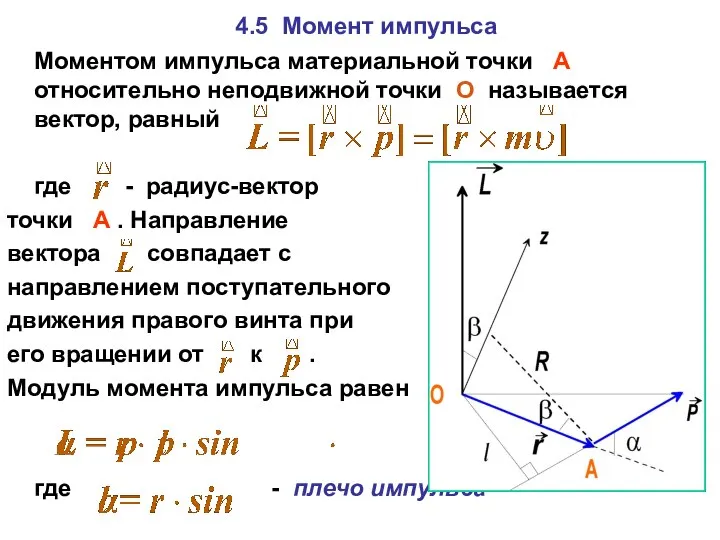
4.5 Момент импульса
Моментом импульса материальной точки А относительно неподвижной точки О
4.5 Момент импульса
Моментом импульса материальной точки А относительно неподвижной точки О
 Электричество и магнетизм
Электричество и магнетизм Исследовательский проект «Завтрак с физикой» Автор: учащийся 10 «А» класса МОУ сош №3
Исследовательский проект «Завтрак с физикой» Автор: учащийся 10 «А» класса МОУ сош №3  Лекция 1. Кинематика
Лекция 1. Кинематика Проект по физике «Лабораторные работы по физике за курс 7-9 класса»
Проект по физике «Лабораторные работы по физике за курс 7-9 класса»  Детали механизмов и машин. Червячная передача
Детали механизмов и машин. Червячная передача Агрегатные состояния веществ
Агрегатные состояния веществ Теоретическая механика
Теоретическая механика Магнитное поле. Вектор магнитной индукции
Магнитное поле. Вектор магнитной индукции Закон Кулона. Единица электрического заряда
Закон Кулона. Единица электрического заряда Применение радиоактивных изотопов в археологии
Применение радиоактивных изотопов в археологии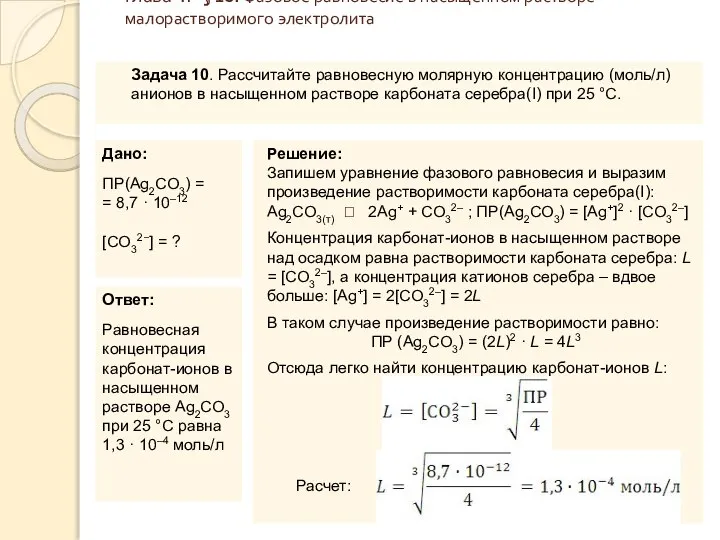 Фазовое равновесие в насыщенном растворе малорастворимого электролита. (Глава 4. Задача 10)
Фазовое равновесие в насыщенном растворе малорастворимого электролита. (Глава 4. Задача 10) Атомное ядро
Атомное ядро Баллистика и аэродинамика
Баллистика и аэродинамика Работа по перемещению заряда в электростатическом поле. Теорема о циркуляции вектора
Работа по перемещению заряда в электростатическом поле. Теорема о циркуляции вектора Великие открытия М. В. Ломоносова в физике. МБОУ СОШ №1
Великие открытия М. В. Ломоносова в физике. МБОУ СОШ №1 На чем основано воздухоплавание
На чем основано воздухоплавание Internal combustion engine
Internal combustion engine Робототехника
Робототехника Презентация по физике "Електричне коло" - скачать
Презентация по физике "Електричне коло" - скачать  Опыт Эрнеста Резерфорда 1871 - 1937
Опыт Эрнеста Резерфорда 1871 - 1937 Импульс материальной точки. Другая формулировка второго закона Ньютона. Реактивное движение
Импульс материальной точки. Другая формулировка второго закона Ньютона. Реактивное движение Хроматография - физический метод разделения
Хроматография - физический метод разделения Презентация по физике Силы в природе
Презентация по физике Силы в природе  Агрегатные состояния вещества. 7 класс
Агрегатные состояния вещества. 7 класс Реальная жидкость. Вязкость
Реальная жидкость. Вязкость  Ультрафиолетового излучения
Ультрафиолетового излучения Презентация по физике "Видимое излучение" - скачать
Презентация по физике "Видимое излучение" - скачать  Основные понятия и определения современных систем управления движением судов
Основные понятия и определения современных систем управления движением судов