- Синтез кулачкового механизма

Содержание
- 2. Основные определения из теории кулачковых механизмов Профиль кулачкового механизма Закон движения ведомого звена кулачкового механизма зависит
- 3. Кулачковый механизм называется центральным, если ось движения толкателя проходит через центр вращения кулачка (e = 0)
- 4. При работе кулачкового механизма можно различить следующие фазы движения ведомого звена: - фаза удаления ведомого звена
- 5. Законы движения кулачковых механизмов Достоинством кулачкового механизма является простота обеспечения практически любого закона движения ведомого звена
- 6. Динамический синтез кулачкового механизма Пусть заданы максимально допустимый угол давления ϑдоп, фазовые углы φу, φд, φв,
- 9. Скачать презентацию
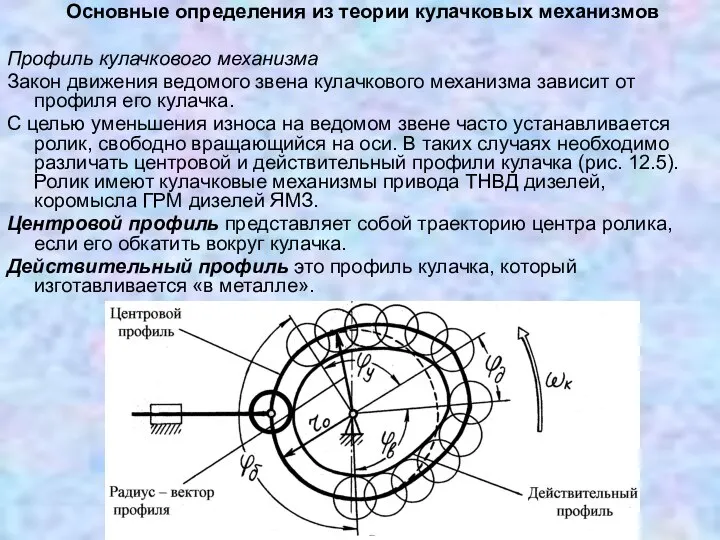
Основные определения из теории кулачковых механизмов
Профиль кулачкового механизма
Закон движения ведомого
Основные определения из теории кулачковых механизмов
Профиль кулачкового механизма
Закон движения ведомого
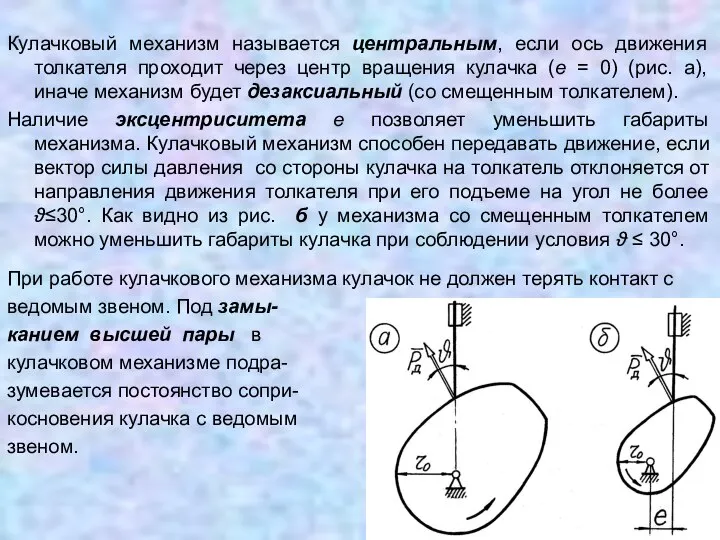
Кулачковый механизм называется центральным, если ось движения толкателя проходит через центр
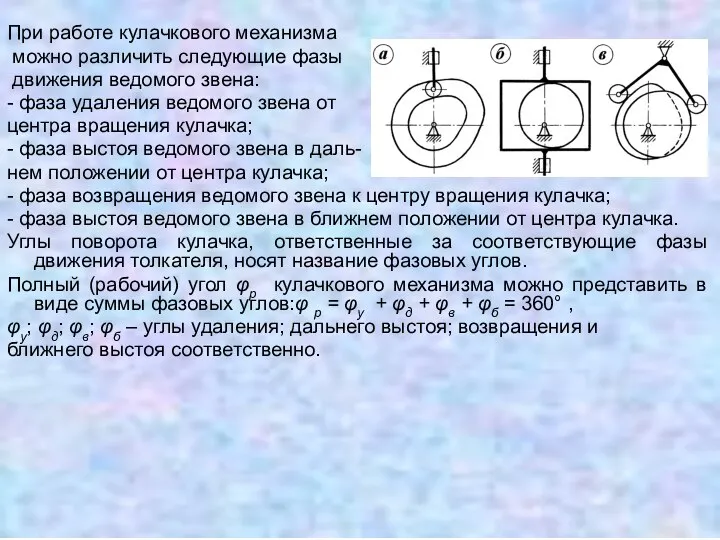
При работе кулачкового механизма
можно различить следующие фазы
движения ведомого
При работе кулачкового механизма
можно различить следующие фазы
движения ведомого
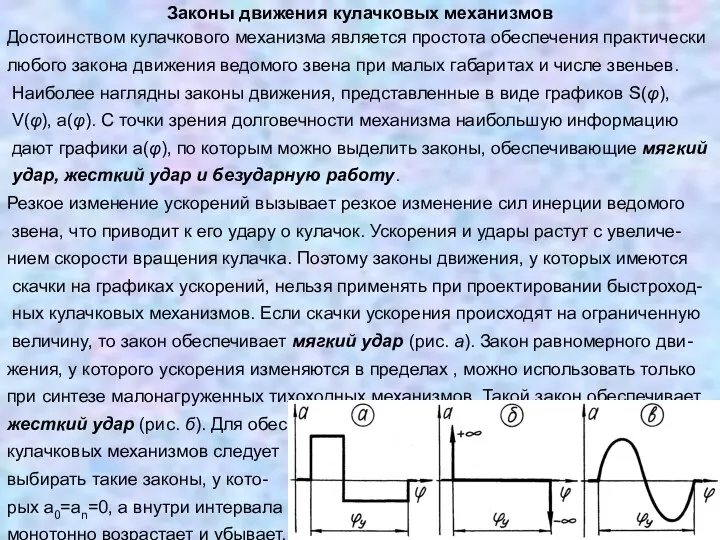
Законы движения кулачковых механизмов
Достоинством кулачкового механизма является простота обеспечения практически
любого закона
Законы движения кулачковых механизмов
Достоинством кулачкового механизма является простота обеспечения практически
любого закона
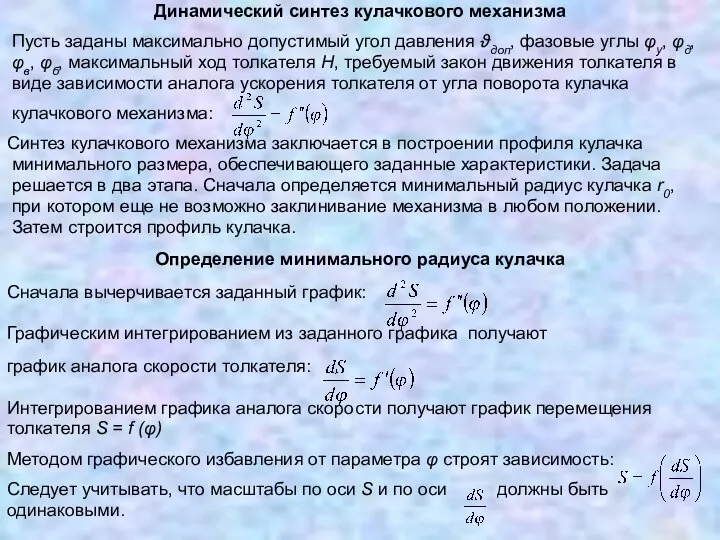
Динамический синтез кулачкового механизма
Пусть заданы максимально допустимый угол давления
Динамический синтез кулачкового механизма
Пусть заданы максимально допустимый угол давления

 Ievadlekcija Materiala punkta kinematika
Ievadlekcija Materiala punkta kinematika Спектроскоп. Устройство спектроскопа
Спектроскоп. Устройство спектроскопа Презентация по физике "Гидравлический пресс" - скачать бесплатно
Презентация по физике "Гидравлический пресс" - скачать бесплатно ЭСПРИ. Электронный справочник инженера
ЭСПРИ. Электронный справочник инженера ХИМИЯ Гладышева Ирина Владимировна к.х.н., доцент
ХИМИЯ Гладышева Ирина Владимировна к.х.н., доцент  Звук. Джерела звуків
Звук. Джерела звуків Презентация Магнитное поле Земли
Презентация Магнитное поле Земли  Термодинамические возможности получения меди с применением программного комплекса АСТРА-4
Термодинамические возможности получения меди с применением программного комплекса АСТРА-4 Расчет участка контактной сети однофазного переменного тока. Специальная часть: монтаж устройств освещения объектов
Расчет участка контактной сети однофазного переменного тока. Специальная часть: монтаж устройств освещения объектов Физика. Что изучает физика? Урок физики в 7 классе .
Физика. Что изучает физика? Урок физики в 7 классе . Равновесие абсолютно твёрдых тел
Равновесие абсолютно твёрдых тел Магнитное поле
Магнитное поле Гидродинамика Солнца. (Лекция 6)
Гидродинамика Солнца. (Лекция 6) Звуковые волны. Распространение звука. Скорость звука
Звуковые волны. Распространение звука. Скорость звука Проект по физике на тему:
Проект по физике на тему: Электрическое сопротивление проводников
Электрическое сопротивление проводников Сила тертя Сили в механіці
Сила тертя Сили в механіці  Плоское движение тела
Плоское движение тела Истечение жидкости через отверстия
Истечение жидкости через отверстия Климатическая камера
Климатическая камера Кинематический и динамический анализ механизмов
Кинематический и динамический анализ механизмов Термоэлекричество
Термоэлекричество Световые кольца. Лазер
Световые кольца. Лазер Исследование полей «Токов смещения»
Исследование полей «Токов смещения» Биомеханика двигательных действий: составные движения в биокинематических цепях
Биомеханика двигательных действий: составные движения в биокинематических цепях Сканирующий атомно-силовой микроскоп
Сканирующий атомно-силовой микроскоп Организация технического обслуживания автомобилей с разработкой технологии проведения технического обслуживания автомобиля ГАЗ
Организация технического обслуживания автомобилей с разработкой технологии проведения технического обслуживания автомобиля ГАЗ Кинематика Относительность движения
Кинематика Относительность движения