- Теория автоматического управления

Содержание
- 2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. 3-е, испр. – М.: Изд-во «Наука». Главная
- 3. Алгоритм управления Двигатель Авто Желаемая скорость дроссель угла (напряжение) Момент (сила) Реальная скорость Системы управления
- 4. Алгоритм управления Двигатель Авто Желаемая скорость дроссель угла (напряжение) Момент Реальная скорость + - Ветер, сила
- 5. Алгоритм управления Двигатель Авто Желаемая скорость дроссель угла (напряжение) Момент Реальная скорость + - Ветер, сила
- 6. Достоинства Почему замкнутая система малочувствительна к изменению параметров? Коэффициент передачи стал меньше единицы Пусть k1=10 Пусть
- 7. Пример: центробежный регулятор Уатта
- 8. Понятие системы управления. Сущность автоматического управления Система - совокупность элементов любой физической природы и процессы, наблюдаемые
- 9. Понятие системы управления. Сущность автоматического управления g – задающее воздействие (цель управления) u1, u2, …, um
- 10. Понятие системы управления. Сущность автоматического управления Объект управления (ОУ) – управляемая подсистема, на которую действуют управляющие
- 11. Понятие системы управления. Сущность автоматического управления Обобщенные координаты системы (xi, yi, ui и fi), в общем
- 12. Понятие автоматического регулирования Проблема автоматического регулирования – частный случай проблемы автоматического управления, ориентированная на замкнутые активные
- 13. Понятие автоматического регулирования Последовательность решения задачи регулирования: Выбор датчиков для измерения выходных переменных ОУ; 2. Выбор
- 14. Критерии качества регулирования Основным требованием, предъявляемым к САР, является обеспечение в допустимых пределах значений ошибок между
- 15. Основные принципы управления 1. Разомкнутое управление принцип наиболее прост в реализации; не требует КУ (обычно); качество
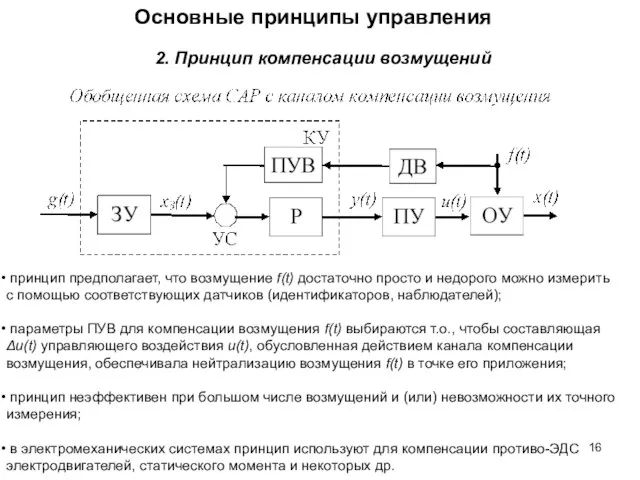
- 16. Основные принципы управления 2. Принцип компенсации возмущений принцип предполагает, что возмущение f(t) достаточно просто и недорого
- 17. Основные принципы управления 3. Принцип компенсации отклонений (принцип отрицательной обратной связи) принцип состоит в формировании управляющего
- 18. Основные принципы управления 3. Принцип компенсации отклонений (принцип отрицательной обратной связи) Отклонение регулируемой координаты – разность
- 19. Основные принципы управления 4. Принцип комбинированного управления принцип позволяет эффективно производить и компенсацию отклонений, и компенсацию
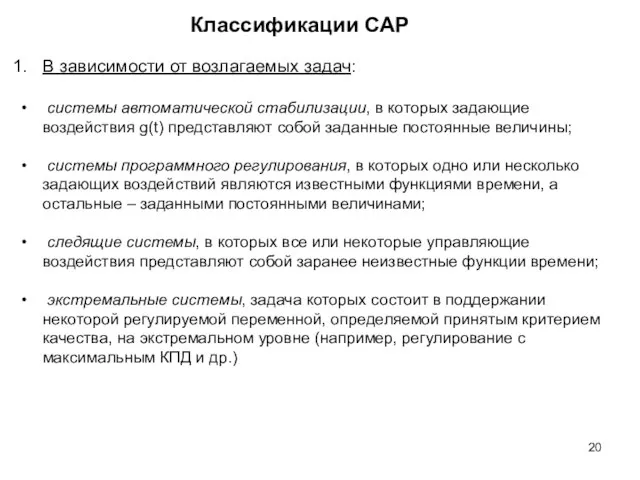
- 20. Классификации САР В зависимости от возлагаемых задач: системы автоматической стабилизации, в которых задающие воздействия g(t) представляют
- 21. 2. В зависимости от характера внутренних сигналов, передаваемых от одного элемента системы к другому: непрерывные –
- 22. импульсные, или системы с импульсной модуляцией сигнала, содержащие импульсные элементы (импульсные модуляторы и экстраполяторы) и осуществляющие
- 23. релейные, содержащие релейные элементы и осуществляющие квантование сигнала по уровню; релейно-импульсные, или кодово-импульсные, в которых происходит
- 25. Скачать презентацию

Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. 3-е, испр.
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Изд. 3-е, испр.

Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
(сила)
Реальная
скорость
Системы управления
Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
(сила)
Реальная
скорость
Системы управления

Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
Реальная
скорость
+
-
Ветер,
сила притяжения
Разомкнутая система (Open-loop Control)
Недостатки
Чувствительна к изменению параметров
Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
Реальная
скорость
+
-
Ветер,
сила притяжения
Разомкнутая система (Open-loop Control)
Недостатки
Чувствительна к изменению параметров

Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
Реальная
скорость
+
-
Ветер,
сила притяжения
Замкнутая система (Closed-loop Control)
Недостатки
Сложность
Дороговизна
Возможна потеря
Алгоритм
управления
Двигатель
Авто
Желаемая
скорость
дроссель
угла
(напряжение)
Момент
Реальная
скорость
+
-
Ветер,
сила притяжения
Замкнутая система (Closed-loop Control)
Недостатки
Сложность
Дороговизна
Возможна потеря

Достоинства
Почему замкнутая система малочувствительна к изменению параметров?
Коэффициент передачи стал меньше
Достоинства
Почему замкнутая система малочувствительна к изменению параметров?
Коэффициент передачи стал меньше
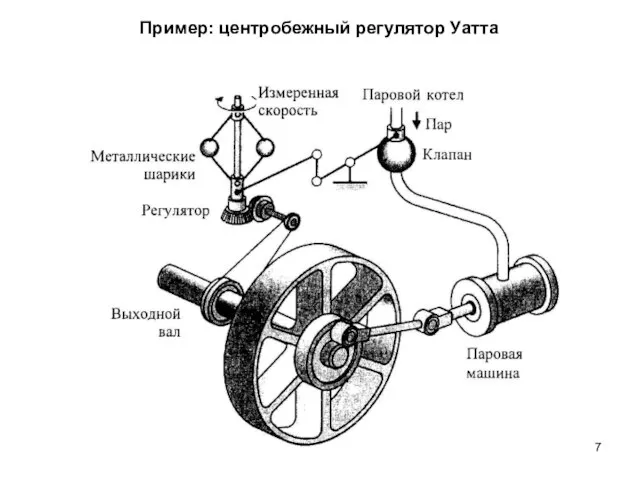
Пример: центробежный регулятор Уатта
Пример: центробежный регулятор Уатта
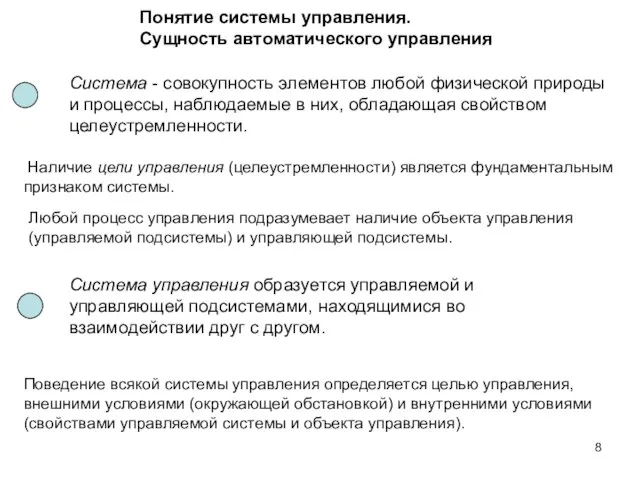
Понятие системы управления.
Сущность автоматического управления
Система - совокупность элементов любой физической
Понятие системы управления.
Сущность автоматического управления
Система - совокупность элементов любой физической

Понятие системы управления.
Сущность автоматического управления
g – задающее воздействие (цель управления)
u1,
Понятие системы управления.
Сущность автоматического управления
g – задающее воздействие (цель управления)
u1,

Понятие системы управления.
Сущность автоматического управления
Объект управления (ОУ) – управляемая подсистема,
Понятие системы управления.
Сущность автоматического управления
Объект управления (ОУ) – управляемая подсистема,

Понятие системы управления.
Сущность автоматического управления
Обобщенные координаты системы (xi, yi, ui
Понятие системы управления.
Сущность автоматического управления
Обобщенные координаты системы (xi, yi, ui

Понятие автоматического регулирования
Проблема автоматического регулирования – частный случай проблемы автоматического управления,
Понятие автоматического регулирования
Проблема автоматического регулирования – частный случай проблемы автоматического управления,
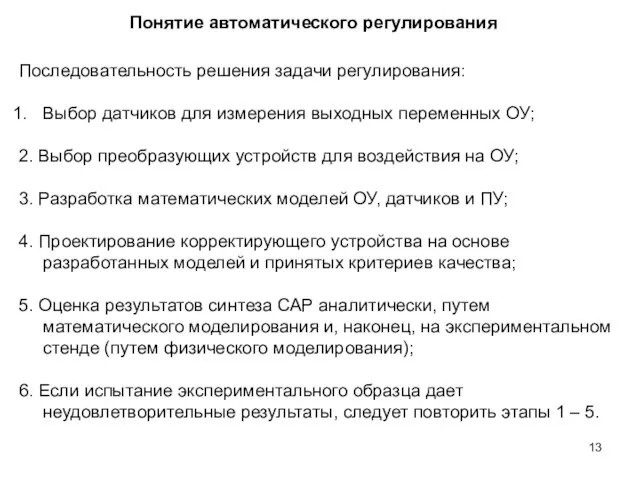
Понятие автоматического регулирования
Последовательность решения задачи регулирования:
Выбор датчиков для измерения выходных переменных
Понятие автоматического регулирования
Последовательность решения задачи регулирования:
Выбор датчиков для измерения выходных переменных

Критерии качества регулирования
Основным требованием, предъявляемым к САР, является обеспечение в
Критерии качества регулирования
Основным требованием, предъявляемым к САР, является обеспечение в
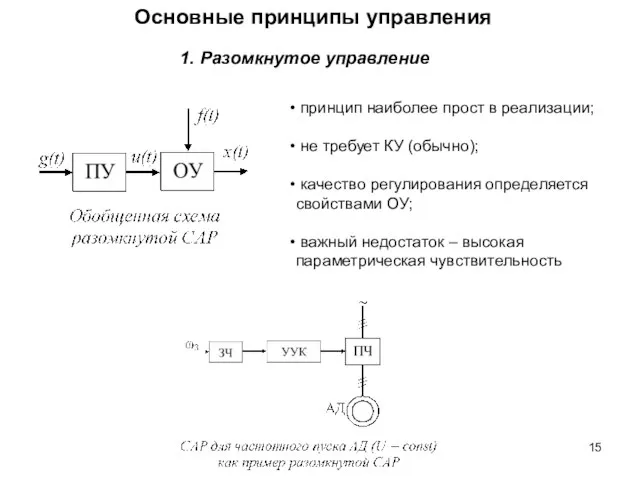
Основные принципы управления
1. Разомкнутое управление
принцип наиболее прост в
Основные принципы управления
1. Разомкнутое управление
принцип наиболее прост в
Основные принципы управления
2. Принцип компенсации возмущений
принцип предполагает, что
Основные принципы управления
2. Принцип компенсации возмущений
принцип предполагает, что

Основные принципы управления
3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)
Основные принципы управления
3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)

Основные принципы управления
3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)
Отклонение
Основные принципы управления
3. Принцип компенсации отклонений
(принцип отрицательной обратной связи)
Отклонение

Основные принципы управления
4. Принцип комбинированного управления
принцип позволяет эффективно производить
Основные принципы управления
4. Принцип комбинированного управления
принцип позволяет эффективно производить
Классификации САР
В зависимости от возлагаемых задач:
системы автоматической стабилизации, в
Классификации САР
В зависимости от возлагаемых задач:
системы автоматической стабилизации, в

2. В зависимости от характера внутренних сигналов, передаваемых от одного элемента
2. В зависимости от характера внутренних сигналов, передаваемых от одного элемента

импульсные, или системы с импульсной модуляцией сигнала, содержащие импульсные элементы
импульсные, или системы с импульсной модуляцией сигнала, содержащие импульсные элементы

релейные, содержащие релейные элементы и осуществляющие квантование сигнала по уровню;
релейные, содержащие релейные элементы и осуществляющие квантование сигнала по уровню;
 Теоретические основы индукционного каротажа
Теоретические основы индукционного каротажа Презентация выполнена учителем физики МОУ СОШ №4 города Урюпинска Волгоградской области Рожковой Светланой Николаевной
Презентация выполнена учителем физики МОУ СОШ №4 города Урюпинска Волгоградской области Рожковой Светланой Николаевной Колебательный контур
Колебательный контур Червячные передачи
Червячные передачи Второе начало термодинамики. Циклы. (Лекция 10)
Второе начало термодинамики. Циклы. (Лекция 10) Виды спектров
Виды спектров Классификация и основные виды антенн. Антенно-фидерные устройства и распространение радиоволн
Классификация и основные виды антенн. Антенно-фидерные устройства и распространение радиоволн Презентация по физике "Механические волны" - скачать
Презентация по физике "Механические волны" - скачать  Сейсмическая разведка
Сейсмическая разведка Динамометр. Механический динамометр
Динамометр. Механический динамометр Электростатическое поле в веществе
Электростатическое поле в веществе электродинамика Лекция 11
электродинамика Лекция 11  Принципы полета. Часть 2-2 СВЕРХЗВУК
Принципы полета. Часть 2-2 СВЕРХЗВУК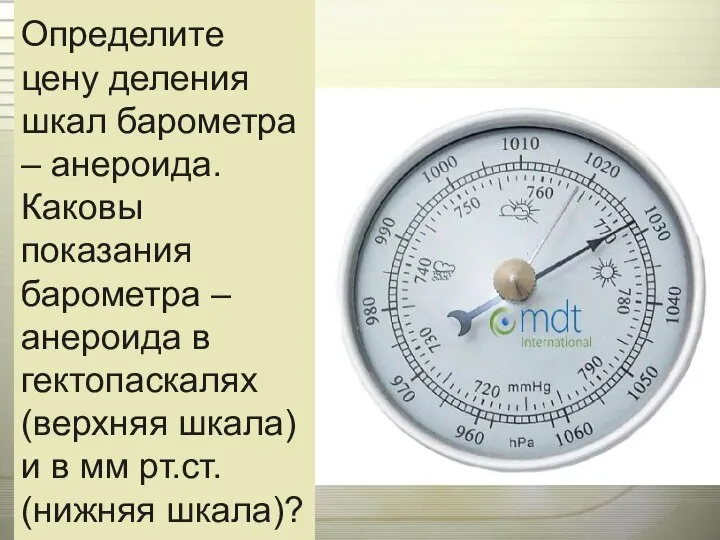 Устройство и принцип действия приборов для измерения давления
Устройство и принцип действия приборов для измерения давления Электрический ток в различных средах. Электролитическая диссоциация. Электролиз
Электрический ток в различных средах. Электролитическая диссоциация. Электролиз Линзы Построения изображений в линзах
Линзы Построения изображений в линзах Характеристики эллиптической траектории
Характеристики эллиптической траектории Энергия топлива. Теплота сгорания топлива
Энергия топлива. Теплота сгорания топлива Гирлянда
Гирлянда А.В. Бурдаков. Физика плазмы
А.В. Бурдаков. Физика плазмы Законы Кирхгофа
Законы Кирхгофа ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)
ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2) Презентация по физике Удельная теплота плавления
Презентация по физике Удельная теплота плавления  Региональный чемпионат «Молодые профессионалы Москвы» по стандартам JuniorSkills
Региональный чемпионат «Молодые профессионалы Москвы» по стандартам JuniorSkills Штарк Йоханнес (15.04.1874 - 21.06.1957)
Штарк Йоханнес (15.04.1874 - 21.06.1957) Факторы, влияющие на скорость испарения
Факторы, влияющие на скорость испарения Презентацию готовили: Цыбенко Наташа и Ксенофонтова Юля
Презентацию готовили: Цыбенко Наташа и Ксенофонтова Юля  Название курса: Физика 10 класс. Название темы урока: Законы Ньютона.
Название курса: Физика 10 класс. Название темы урока: Законы Ньютона.