- Методы системного анализа и синтеза: графы и сети Петри

Содержание
- 2. ГРАФ. ОПРЕДЕЛЕНИЕ Граф есть пара G = 〈V, А 〉, где V – множество вершин v,
- 3. Полный неориентированный граф Между любыми двумя вершинами есть связь Ориентированный взвешенный граф ОТНОШЕНИЯ И ГРАФЫ Ребрам
- 4. ОТНОШЕНИЯ И ГРАФЫ Наглядно представлять в виде графов можно различные отношения. Представление отношений с помощью графов
- 5. ПРИМЕРЫ ГРАФОВ Неориентированный граф с петлей Взвешенный мультиграф Между v1 и v5 две дуги с разным
- 6. ГРАФЫ ОТНОШЕНИЙ v1 ТИПЫ ОТНОШЕНИЙ Z = {+, −, 0} ВЗАИМНЫЕ v1 v2 + + v1
- 7. ПУТЬ В ГРАФЕ Путь – термин для ориентированного графа; Цепь – для неориентированного. Путем в графе
- 8. ПУТЬ В ГРАФЕ Путь называется: простым, если все вершины vi различны; замкнутым, если vi+1 = v1;
- 9. ПРИМЕРЫ ПУТЕЙ В ГРАФЕ Для графа постройте простой путь, замкнутый путь, полный путь, контур, полный контур.
- 10. ТУРНИРЫ Ориентированный граф DG = 〈 V, А 〉 называется турниром, если между любыми двумя вершинами
- 11. ХАРАКТЕРИСТИКИ ГРАФА: СВЯЗНОСТЬ Важным понятием в теории графов является понятие связности. Если для любых двух вершин
- 12. ПОКАЗАТЕЛЬ СВЯЗНОСТИ Пусть |Rmin | − минимальное число связей, необходимых для связности графа структуры. Если граф
- 13. ХАРАКТЕРИСТИКИ ГРАФА: МОЩНОСТЬ Мощностью графа называется количество дуг, связывающих две вершины. При этом дуги, имеющие встречное
- 14. ХАРАКТЕРИСТИКИ ГРАФА: РАЗМЕРНОСТЬ Размерность графа определяется общим количеством вершин и дуг, существующих в графе. В одних
- 15. ПОНЯТИЯ СМЕЖНОСТИ И ИНЦИДЕНТНОСТИ Если две различные дуги графа инцидентны одной и той же вершине, то
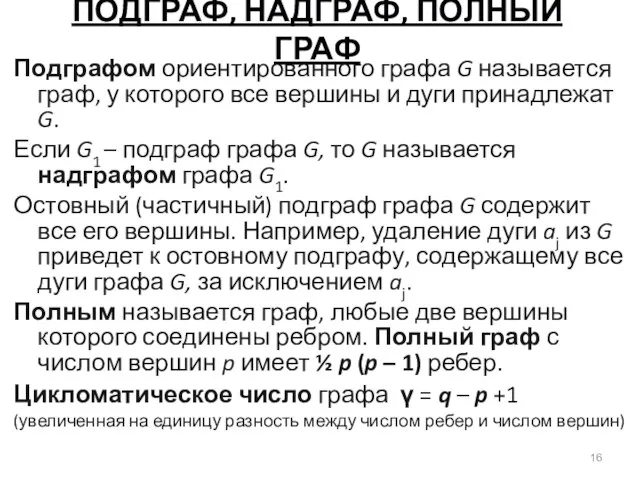
- 16. ПОДГРАФ, НАДГРАФ, ПОЛНЫЙ ГРАФ Подграфом ориентированного графа G называется граф, у которого все вершины и дуги
- 17. ДВУДОЛЬНЫЙ ГРАФ Двудольный граф – это граф G, множество вершин V которого можно разбить на два
- 18. ПРИМЕР ДВУДОЛЬНОГО ГРАФА. СЕТИ ПЕТРИ
- 19. СЕТИ ПЕТРИ. ВВЕДЕНИЕ Одним из инструментов моделирования дискретных процессов, протекающих в производственных системах (ПС), являются сети
- 20. СЕТИ ПЕТРИ. ВВЕДЕНИЕ Процесс функционирования ПС отображается как изменения маркировки сети Петри, представляющей данную ПС. Маркировка
- 21. ИСПОЛЬЗОВАНИЕ СЕТЕЙ ПЕТРИ Моделирование временными сетями Петри применяют для различных целей: изучение процессов, протекающих в ПС,
- 22. СЕТИ ПЕТРИ. ОСНОВНЫЕ ПОНЯТИЯ В любой сложной системе можно выделить две составляющих: Условия возникновения событий События
- 23. СЕТИ ПЕТРИ. РАЗМЕТКА СЕТИ Условие выполнено один раз: Pn Все условия в сети имеют кратность выполнения,
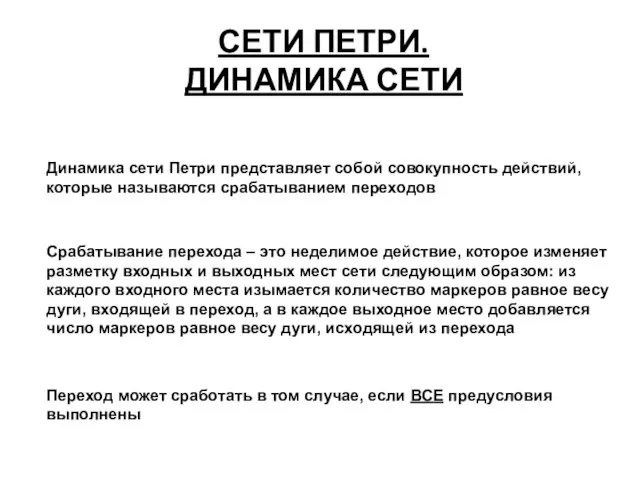
- 24. СЕТИ ПЕТРИ. ДИНАМИКА СЕТИ Динамика сети Петри представляет собой совокупность действий, которые называются срабатыванием переходов Переход
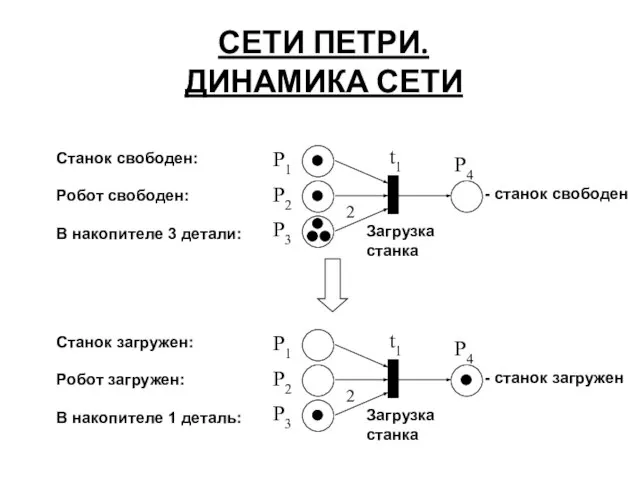
- 25. СЕТИ ПЕТРИ. ДИНАМИКА СЕТИ Станок свободен: t1 Робот свободен: В накопителе 3 детали: P1 P3 P2
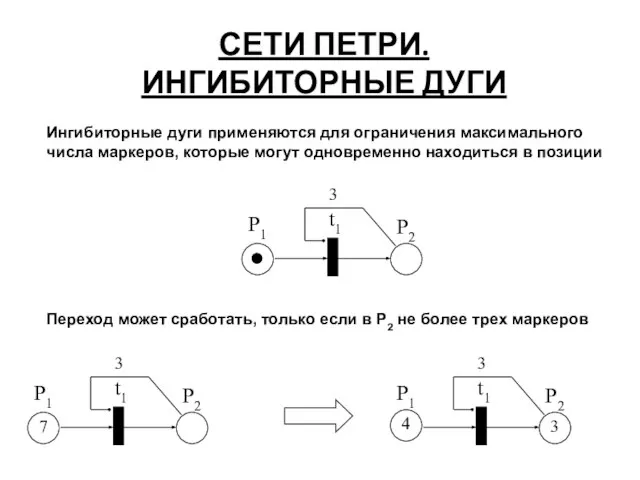
- 26. СЕТИ ПЕТРИ. ИНГИБИТОРНЫЕ ДУГИ t1 Переход может сработать, только если в P2 не более трех маркеров
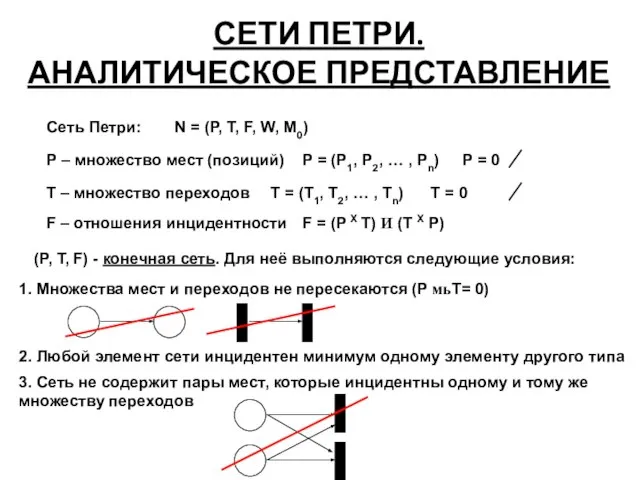
- 27. СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ Сеть Петри: N = (P, T, F, W, M0) 1. Множества мест
- 28. СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ Сеть Петри: N = (P, T, F, W, M0) W – кратности
- 29. СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ На основании отношений инцидентности построим матрицы дуг для данной сети: W (k,
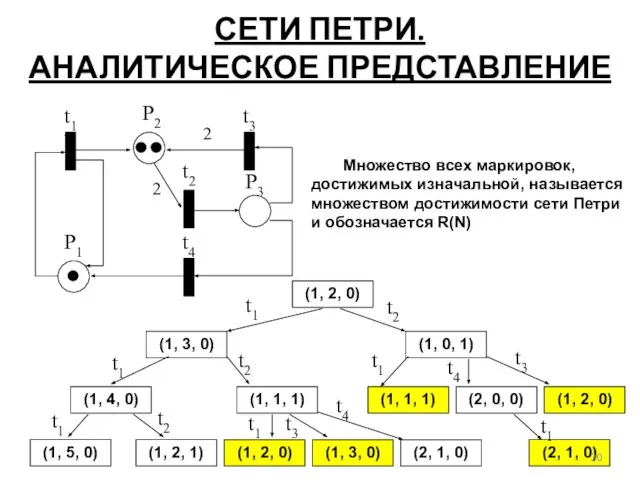
- 30. СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ Множество всех маркировок, достижимых изначальной, называется множеством достижимости сети Петри и обозначается
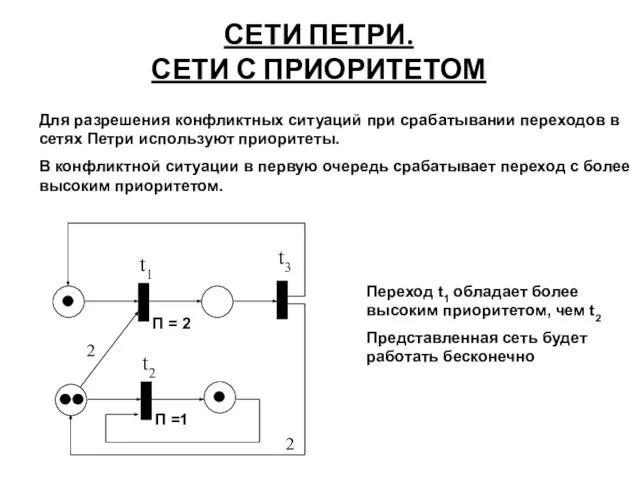
- 31. СЕТИ ПЕТРИ. СЕТИ С ПРИОРИТЕТОМ Переход t1 обладает более высоким приоритетом, чем t2 Представленная сеть будет
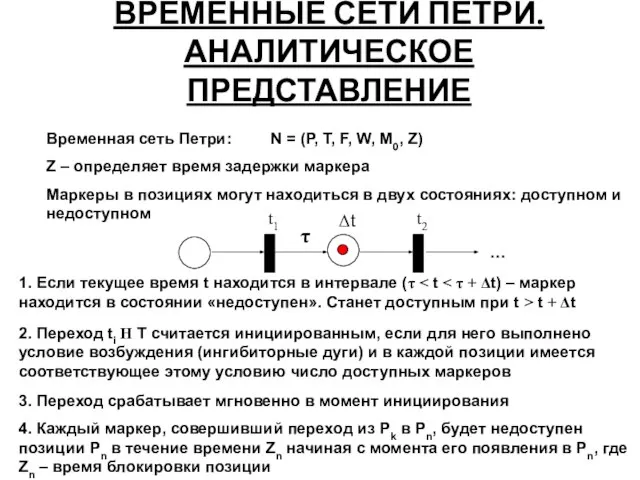
- 32. ВРЕМЕННЫЕ СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ Временная сеть Петри: N = (P, T, F, W, M0, Z)
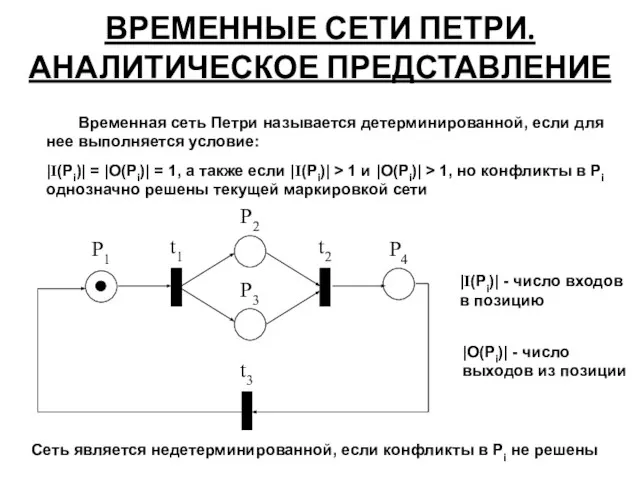
- 33. ВРЕМЕННЫЕ СЕТИ ПЕТРИ. АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ Временная сеть Петри называется детерминированной, если для нее выполняется условие: |I(Pi)|
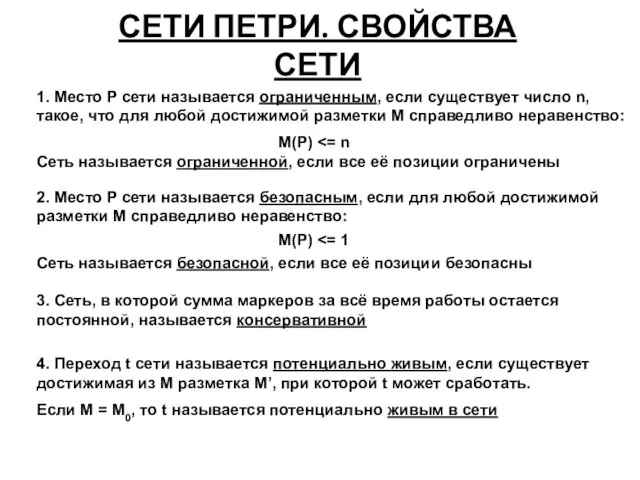
- 34. СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ 1. Место P сети называется ограниченным, если существует число n, такое, что
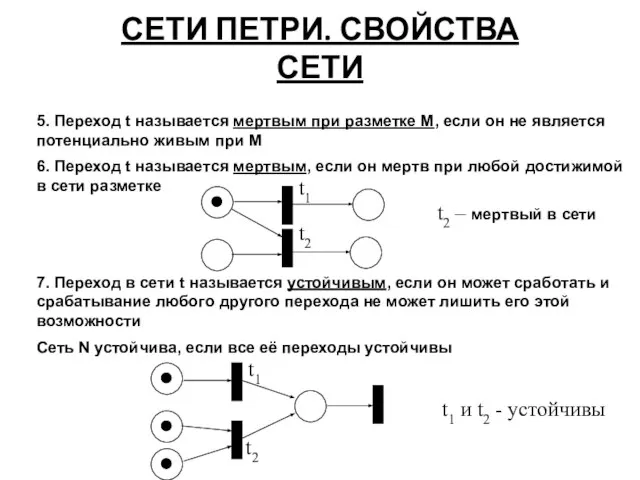
- 35. СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ 5. Переход t называется мертвым при разметке M, если он не является
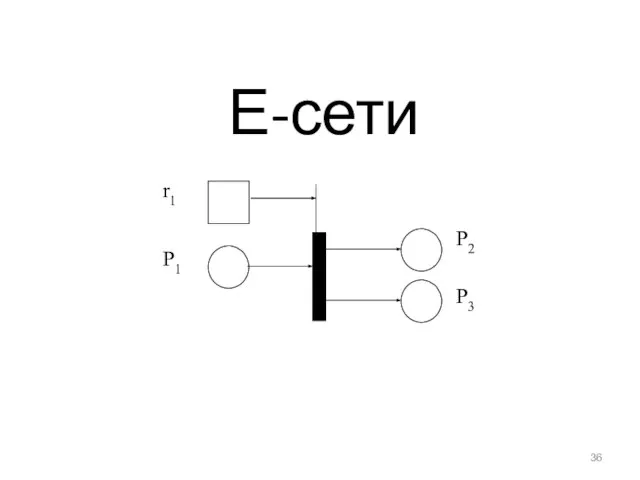
- 36. Е-сети
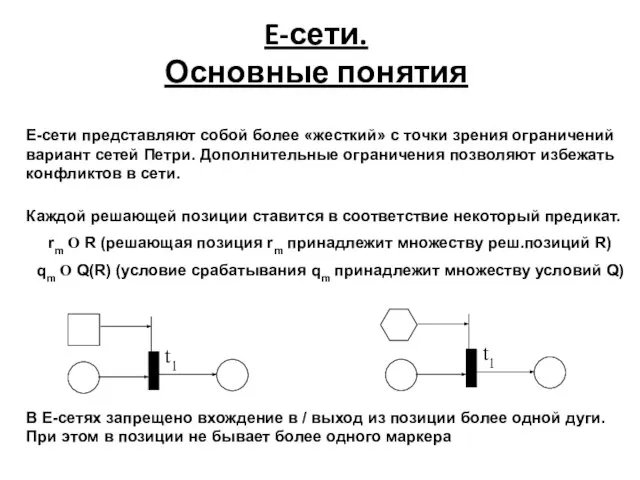
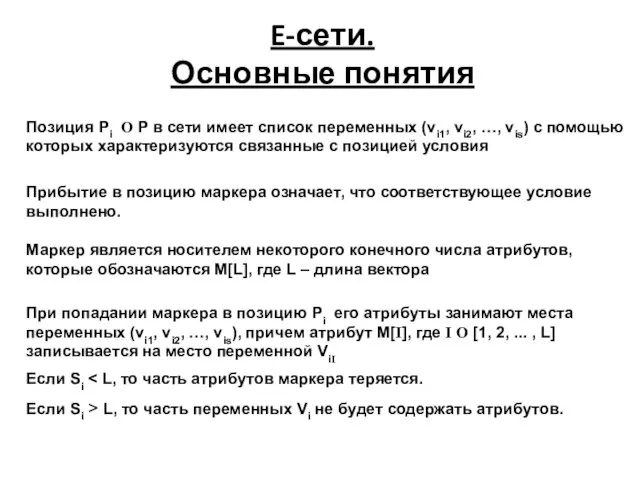
- 37. E-сети. Основные понятия Е-сети представляют собой более «жесткий» с точки зрения ограничений вариант сетей Петри. Дополнительные
- 38. E-сети. Основные понятия Прибытие в позицию маркера означает, что соответствующее условие выполнено. При попадании маркера в
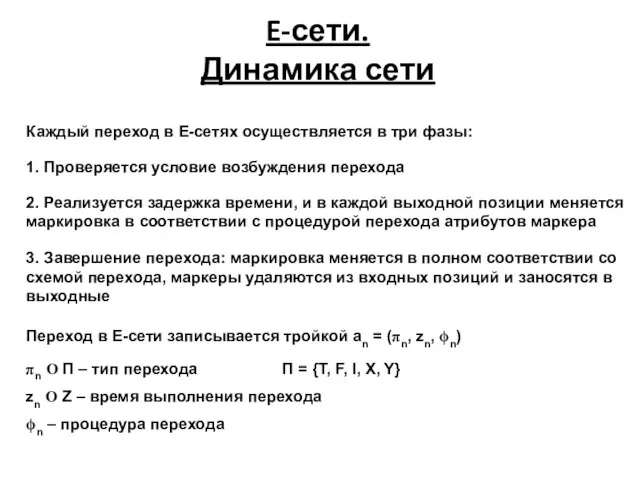
- 39. E-сети. Динамика сети 1. Проверяется условие возбуждения перехода 2. Реализуется задержка времени, и в каждой выходной
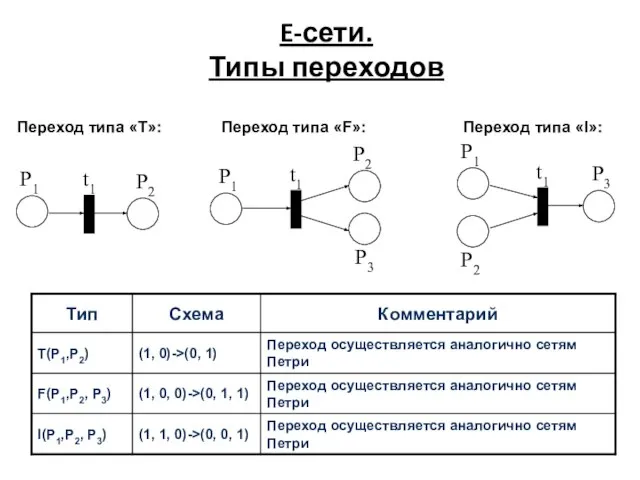
- 40. E-сети. Типы переходов Переход типа «T»: t1 P1 P2 t1 P1 P2 P3 t1 P2 P3
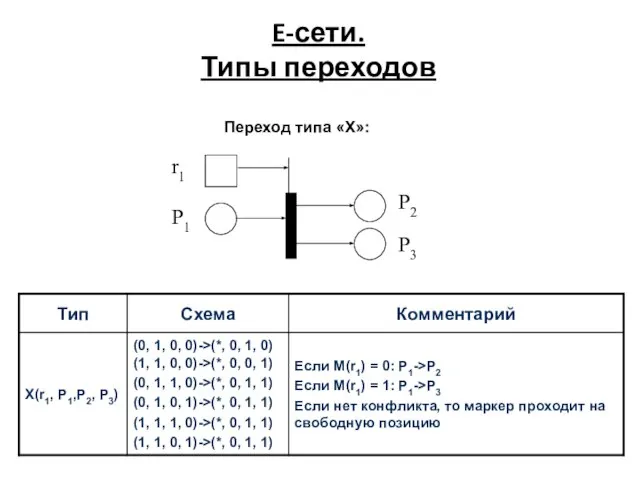
- 41. E-сети. Типы переходов r1 P2 P3 P1 Переход типа «X»:
- 42. E-сети. Типы переходов r1 P2 P3 P1 Переход типа «Y»:
- 44. Скачать презентацию
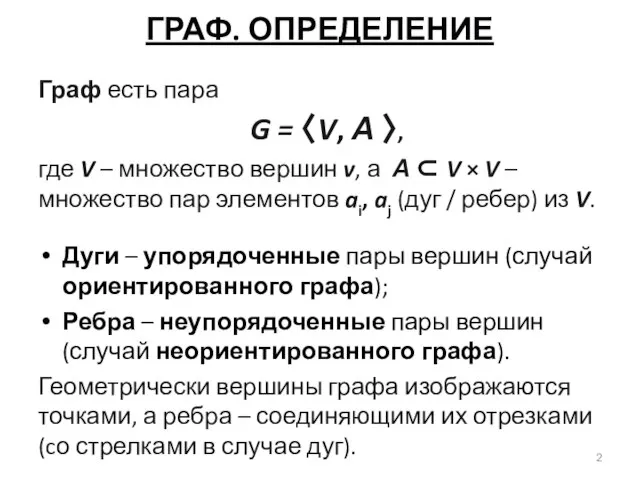
ГРАФ. ОПРЕДЕЛЕНИЕ
Граф есть пара
G = 〈V, А 〉,
где
ГРАФ. ОПРЕДЕЛЕНИЕ
Граф есть пара
G = 〈V, А 〉,
где
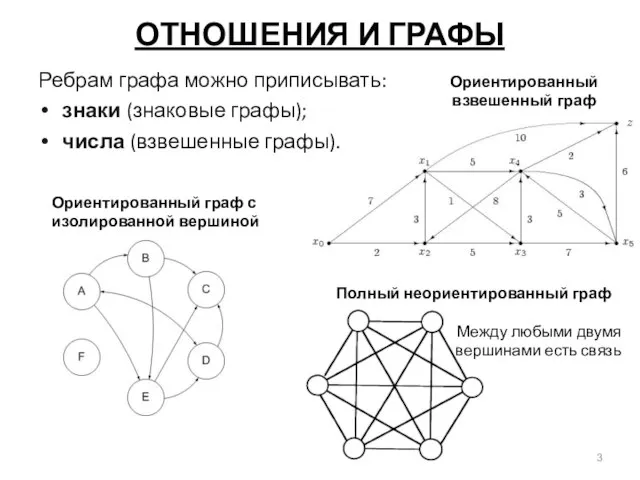
Полный неориентированный граф
Между любыми двумя
вершинами есть связь
Ориентированный взвешенный граф
ОТНОШЕНИЯ
Полный неориентированный граф
Между любыми двумя
вершинами есть связь
Ориентированный взвешенный граф
ОТНОШЕНИЯ
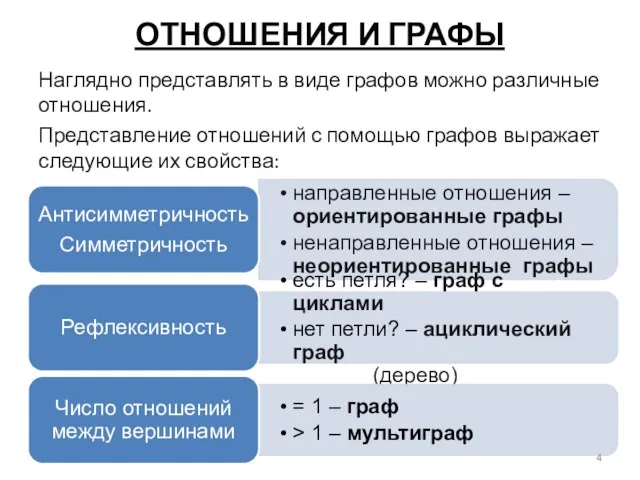
ОТНОШЕНИЯ И ГРАФЫ
Наглядно представлять в виде графов можно различные отношения.
Представление отношений
ОТНОШЕНИЯ И ГРАФЫ
Наглядно представлять в виде графов можно различные отношения.
Представление отношений
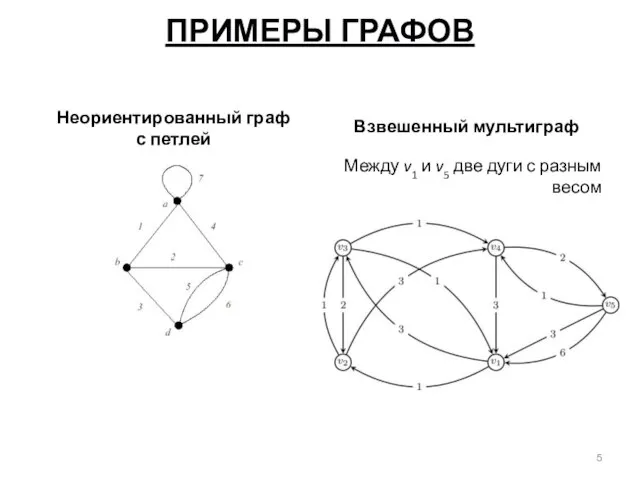
ПРИМЕРЫ ГРАФОВ
Неориентированный граф
с петлей
Взвешенный мультиграф
Между v1 и v5 две дуги
ПРИМЕРЫ ГРАФОВ
Неориентированный граф
с петлей
Взвешенный мультиграф
Между v1 и v5 две дуги
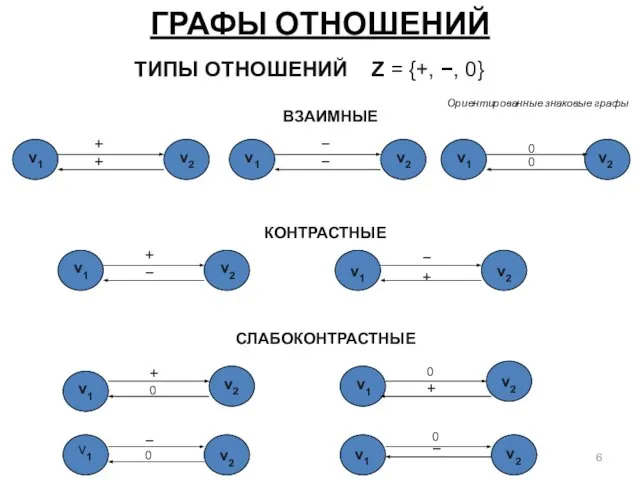
ГРАФЫ ОТНОШЕНИЙ
v1
ТИПЫ ОТНОШЕНИЙ Z = {+, −, 0}
ВЗАИМНЫЕ
v1
v2
+
+
v1
v2
−
−
СЛАБОКОНТРАСТНЫЕ
0
0
v1
v2
v1
v2
+
−
v2
−
+
КОНТРАСТНЫЕ
v2
v2
ГРАФЫ ОТНОШЕНИЙ
v1
ТИПЫ ОТНОШЕНИЙ Z = {+, −, 0}
ВЗАИМНЫЕ
v1
v2
+
+
v1
v2
−
−
СЛАБОКОНТРАСТНЫЕ
0
0
v1
v2
v1
v2
+
−
v2
−
+
КОНТРАСТНЫЕ
v2
v2
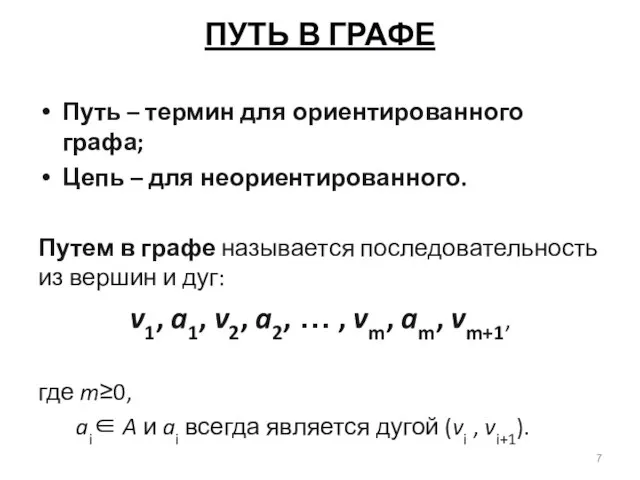
ПУТЬ В ГРАФЕ
Путь – термин для ориентированного графа;
Цепь – для неориентированного.
Путем
ПУТЬ В ГРАФЕ
Путь – термин для ориентированного графа;
Цепь – для неориентированного.
Путем
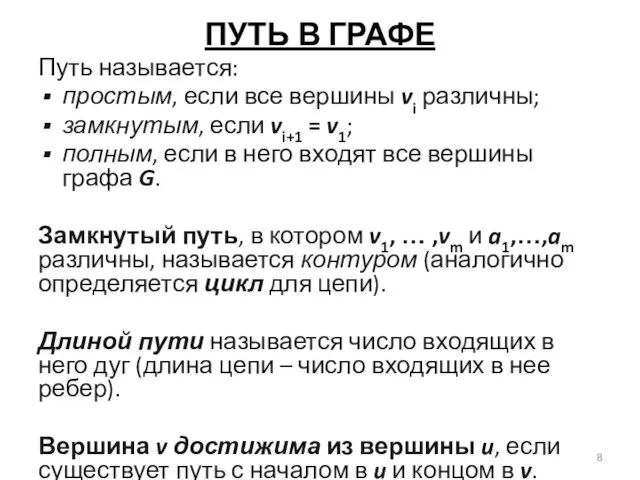
ПУТЬ В ГРАФЕ
Путь называется:
простым, если все вершины vi различны;
замкнутым, если vi+1
ПУТЬ В ГРАФЕ
Путь называется:
простым, если все вершины vi различны;
замкнутым, если vi+1
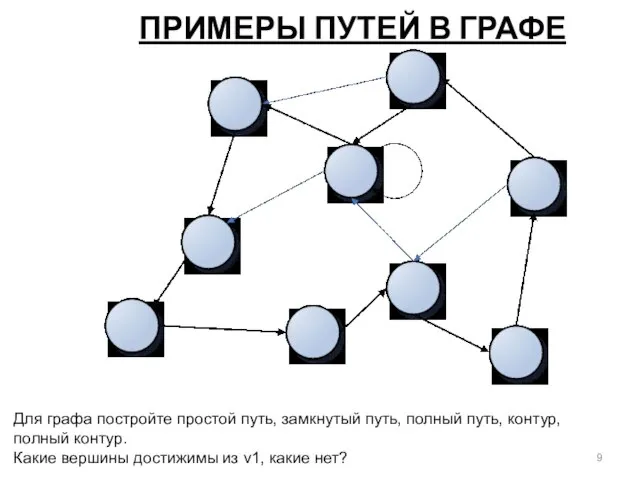
ПРИМЕРЫ ПУТЕЙ В ГРАФЕ
Для графа постройте простой путь, замкнутый путь, полный
ПРИМЕРЫ ПУТЕЙ В ГРАФЕ
Для графа постройте простой путь, замкнутый путь, полный
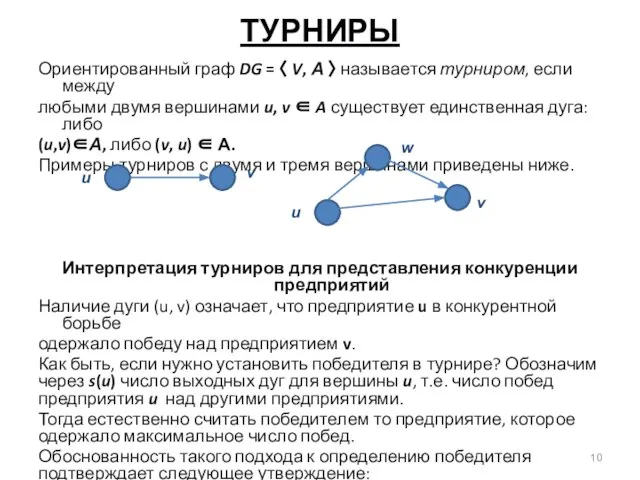
ТУРНИРЫ
Ориентированный граф DG = 〈 V, А 〉 называется турниром, если
ТУРНИРЫ
Ориентированный граф DG = 〈 V, А 〉 называется турниром, если
ХАРАКТЕРИСТИКИ ГРАФА: СВЯЗНОСТЬ
Важным понятием в теории графов является понятие связности.
Если
ХАРАКТЕРИСТИКИ ГРАФА: СВЯЗНОСТЬ
Важным понятием в теории графов является понятие связности.
Если

ПОКАЗАТЕЛЬ СВЯЗНОСТИ
Пусть |Rmin | − минимальное число связей, необходимых для связности
ПОКАЗАТЕЛЬ СВЯЗНОСТИ
Пусть |Rmin | − минимальное число связей, необходимых для связности
ХАРАКТЕРИСТИКИ ГРАФА: МОЩНОСТЬ
Мощностью графа называется количество дуг, связывающих две вершины.
При
ХАРАКТЕРИСТИКИ ГРАФА: МОЩНОСТЬ
Мощностью графа называется количество дуг, связывающих две вершины.
При
ХАРАКТЕРИСТИКИ ГРАФА: РАЗМЕРНОСТЬ
Размерность графа определяется общим
количеством вершин и дуг, существующих
ХАРАКТЕРИСТИКИ ГРАФА: РАЗМЕРНОСТЬ
Размерность графа определяется общим
количеством вершин и дуг, существующих

ПОНЯТИЯ СМЕЖНОСТИ И ИНЦИДЕНТНОСТИ
Если две различные дуги графа инцидентны одной и
ПОНЯТИЯ СМЕЖНОСТИ И ИНЦИДЕНТНОСТИ
Если две различные дуги графа инцидентны одной и
ПОДГРАФ, НАДГРАФ, ПОЛНЫЙ ГРАФ
Подграфом ориентированного графа G называется граф, у которого
ПОДГРАФ, НАДГРАФ, ПОЛНЫЙ ГРАФ
Подграфом ориентированного графа G называется граф, у которого
ДВУДОЛЬНЫЙ ГРАФ
Двудольный граф – это граф G, множество вершин V которого
ДВУДОЛЬНЫЙ ГРАФ
Двудольный граф – это граф G, множество вершин V которого
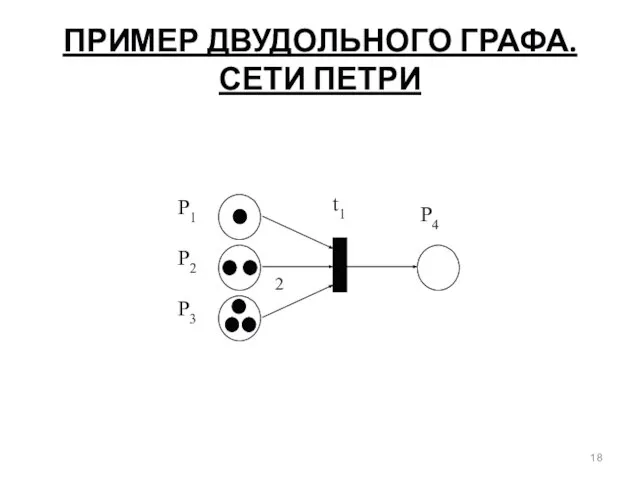
ПРИМЕР ДВУДОЛЬНОГО ГРАФА.
СЕТИ ПЕТРИ
ПРИМЕР ДВУДОЛЬНОГО ГРАФА.
СЕТИ ПЕТРИ
СЕТИ ПЕТРИ. ВВЕДЕНИЕ
Одним из инструментов моделирования дискретных процессов, протекающих в производственных
СЕТИ ПЕТРИ. ВВЕДЕНИЕ
Одним из инструментов моделирования дискретных процессов, протекающих в производственных
СЕТИ ПЕТРИ. ВВЕДЕНИЕ
Процесс функционирования ПС отображается как изменения маркировки сети Петри,
СЕТИ ПЕТРИ. ВВЕДЕНИЕ
Процесс функционирования ПС отображается как изменения маркировки сети Петри,
ИСПОЛЬЗОВАНИЕ СЕТЕЙ ПЕТРИ
Моделирование временными сетями Петри применяют для различных целей:
изучение процессов,
ИСПОЛЬЗОВАНИЕ СЕТЕЙ ПЕТРИ
Моделирование временными сетями Петри применяют для различных целей:
изучение процессов,
СЕТИ ПЕТРИ.
ОСНОВНЫЕ ПОНЯТИЯ
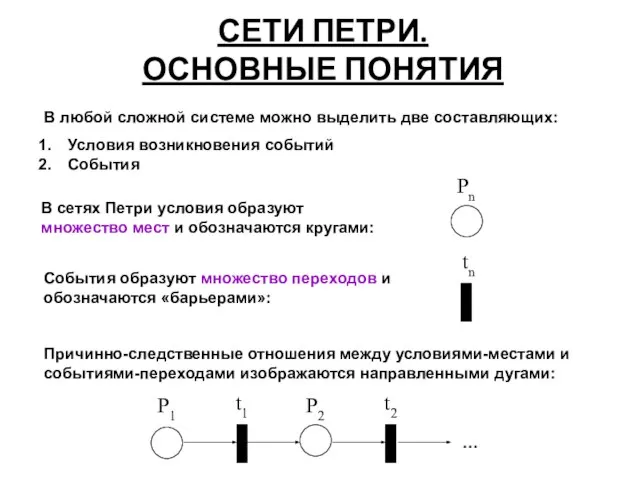
В любой сложной системе можно выделить две
СЕТИ ПЕТРИ.
ОСНОВНЫЕ ПОНЯТИЯ
В любой сложной системе можно выделить две
СЕТИ ПЕТРИ.
РАЗМЕТКА СЕТИ
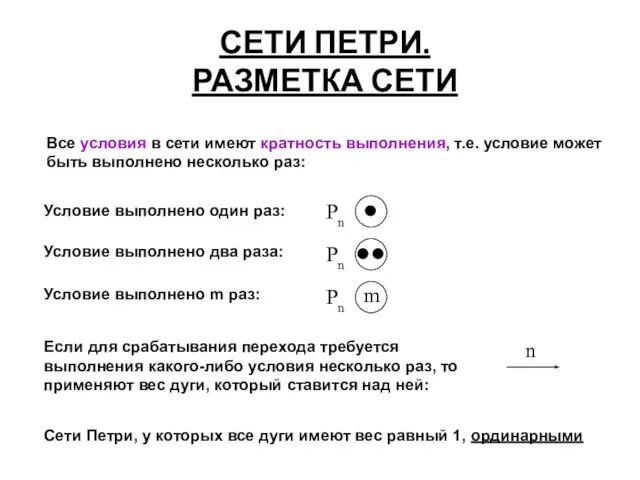
Условие выполнено один раз:
Pn
Все условия в сети
СЕТИ ПЕТРИ.
РАЗМЕТКА СЕТИ
Условие выполнено один раз:
Pn
Все условия в сети
СЕТИ ПЕТРИ.
ДИНАМИКА СЕТИ
Динамика сети Петри представляет собой совокупность действий,
СЕТИ ПЕТРИ.
ДИНАМИКА СЕТИ
Динамика сети Петри представляет собой совокупность действий,
СЕТИ ПЕТРИ.
ДИНАМИКА СЕТИ
Станок свободен:
t1
Робот свободен:
В накопителе 3 детали:
P1
P3
P2
Загрузка станка
2
P4
-
СЕТИ ПЕТРИ.
ДИНАМИКА СЕТИ
Станок свободен:
t1
Робот свободен:
В накопителе 3 детали:
P1
P3
P2
Загрузка станка
2
P4
-
СЕТИ ПЕТРИ.
ИНГИБИТОРНЫЕ ДУГИ
t1
Переход может сработать, только если в P2
СЕТИ ПЕТРИ.
ИНГИБИТОРНЫЕ ДУГИ
t1
Переход может сработать, только если в P2
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Сеть Петри: N = (P, T, F,
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Сеть Петри: N = (P, T, F,

СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Сеть Петри: N = (P, T, F,
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Сеть Петри: N = (P, T, F,

СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
На основании отношений инцидентности построим матрицы дуг
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
На основании отношений инцидентности построим матрицы дуг
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Множество всех маркировок, достижимых изначальной, называется множеством
СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Множество всех маркировок, достижимых изначальной, называется множеством
СЕТИ ПЕТРИ.
СЕТИ С ПРИОРИТЕТОМ
Переход t1 обладает более высоким приоритетом,
СЕТИ ПЕТРИ.
СЕТИ С ПРИОРИТЕТОМ
Переход t1 обладает более высоким приоритетом,
ВРЕМЕННЫЕ СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Временная сеть Петри: N = (P,
ВРЕМЕННЫЕ СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Временная сеть Петри: N = (P,
ВРЕМЕННЫЕ СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Временная сеть Петри называется детерминированной, если
ВРЕМЕННЫЕ СЕТИ ПЕТРИ.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
Временная сеть Петри называется детерминированной, если
СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ
1. Место P сети называется ограниченным, если
СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ
1. Место P сети называется ограниченным, если
СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ
5. Переход t называется мертвым при разметке
СЕТИ ПЕТРИ. СВОЙСТВА СЕТИ
5. Переход t называется мертвым при разметке
Е-сети
Е-сети
E-сети.
Основные понятия
Е-сети представляют собой более «жесткий» с точки зрения
E-сети.
Основные понятия
Е-сети представляют собой более «жесткий» с точки зрения
E-сети.
Основные понятия
Прибытие в позицию маркера означает, что соответствующее условие
E-сети.
Основные понятия
Прибытие в позицию маркера означает, что соответствующее условие
E-сети.
Динамика сети
1. Проверяется условие возбуждения перехода
2. Реализуется задержка времени,
E-сети.
Динамика сети
1. Проверяется условие возбуждения перехода
2. Реализуется задержка времени,
E-сети.
Типы переходов
Переход типа «T»:
t1
P1
P2
t1
P1
P2
P3
t1
P2
P3
P1
Переход типа «F»:
Переход типа «I»:
E-сети.
Типы переходов
Переход типа «T»:
t1
P1
P2
t1
P1
P2
P3
t1
P2
P3
P1
Переход типа «F»:
Переход типа «I»:
E-сети.
Типы переходов
r1
P2
P3
P1
Переход типа «X»:
E-сети.
Типы переходов
r1
P2
P3
P1
Переход типа «X»:

E-сети.
Типы переходов
r1
P2
P3
P1
Переход типа «Y»:
E-сети.
Типы переходов
r1
P2
P3
P1
Переход типа «Y»:
 Что такое OpenGL?
Что такое OpenGL? Презентация по информатике Компьютерные вирусы
Презентация по информатике Компьютерные вирусы  Язык программирования JAVA. Функции
Язык программирования JAVA. Функции Презентация "Архитектура компьютера" - скачать презентации по Информатике
Презентация "Архитектура компьютера" - скачать презентации по Информатике Различные типы компьютеров. Мобильные устройства
Различные типы компьютеров. Мобильные устройства Базовый курс SQL. Хранимые процедуры
Базовый курс SQL. Хранимые процедуры Работа с ПЛК cерий BX и BC
Работа с ПЛК cерий BX и BC Электронные таблицы (ЭТ) на примере MS Excel
Электронные таблицы (ЭТ) на примере MS Excel Программное обеспечение Программное обеспечение компьютера
Программное обеспечение Программное обеспечение компьютера Архитектура ЭВМ и систем: цели и задачи курса
Архитектура ЭВМ и систем: цели и задачи курса Цифровые проекты по английскому языку. Советы и рекомендации
Цифровые проекты по английскому языку. Советы и рекомендации Обработка текстовой информации
Обработка текстовой информации Геоинформационные технологии в системах территориального управления
Геоинформационные технологии в системах территориального управления Кафедра автоматизированных и вычислительных систем ВГТУ Информация для учителей и родителей (выпуск 2014 года)
Кафедра автоматизированных и вычислительных систем ВГТУ Информация для учителей и родителей (выпуск 2014 года) Аттестационная работа. Формирование ИКТ-компетентности младших школьников через применение технологий дистанционного обучения
Аттестационная работа. Формирование ИКТ-компетентности младших школьников через применение технологий дистанционного обучения Форма и элементы управления Семейство UserForm
Форма и элементы управления Семейство UserForm А.Н. Силаенков Информационные системы и технологии Лекция Основные составляющие информационных процессов и условия их реализаци
А.Н. Силаенков Информационные системы и технологии Лекция Основные составляющие информационных процессов и условия их реализаци Проект и основные этапы его разработки Информатика 10 класс по Макаровой Н.В.
Проект и основные этапы его разработки Информатика 10 класс по Макаровой Н.В. Общение в Интернете
Общение в Интернете МОБИЛЬНЫЙ ТЕЛЕФОН- ВРЕД ИЛИ ПОЛЬЗА!? Над проектом работала : ученица 11 «П» класса МОУ «Бичурга-Баишевская СО
МОБИЛЬНЫЙ ТЕЛЕФОН- ВРЕД ИЛИ ПОЛЬЗА!? Над проектом работала : ученица 11 «П» класса МОУ «Бичурга-Баишевская СО Актуальность и значимость копирайтинга в современном мире
Актуальность и значимость копирайтинга в современном мире Компьютерные вирусы. Классификации компьютерных вирусов, методы распространения, профилактики, заражения.
Компьютерные вирусы. Классификации компьютерных вирусов, методы распространения, профилактики, заражения. Анализ программ для сканирования
Анализ программ для сканирования Разработка Web-приложений на React
Разработка Web-приложений на React Ford analytics. Update
Ford analytics. Update Работа на цель. Проведение конкурсов в сети, обеспечивающих достижение конкретных целей
Работа на цель. Проведение конкурсов в сети, обеспечивающих достижение конкретных целей Переводчик будущего: нейросеть vs человек
Переводчик будущего: нейросеть vs человек Формализация понятия алгоритма
Формализация понятия алгоритма