- Момент силы относительно точки О

Содержание
- 2. Момент силы относительно точки. Сила, действующая на тело может не только его смещать, но и поворачивать
- 3. Моментом силы F относительно центра О называется величина, равная произведению силы на кратчайшее расстояние от точки
- 4. Пара сил Система двух равных по модулю, параллельных и противоположно направленных сил, приложенных к телу, называется
- 5. Момент пары сил Плечом пары сил называется кратчайшее расстояние между линиями действия сил, составляющих пару. Моментом
- 6. Свойства пары сил
- 7. Контрольные вопросы 1. Что такое сила? 2. Какие силы называются уравновешивающими? 3. Что называется равнодействующей силой?
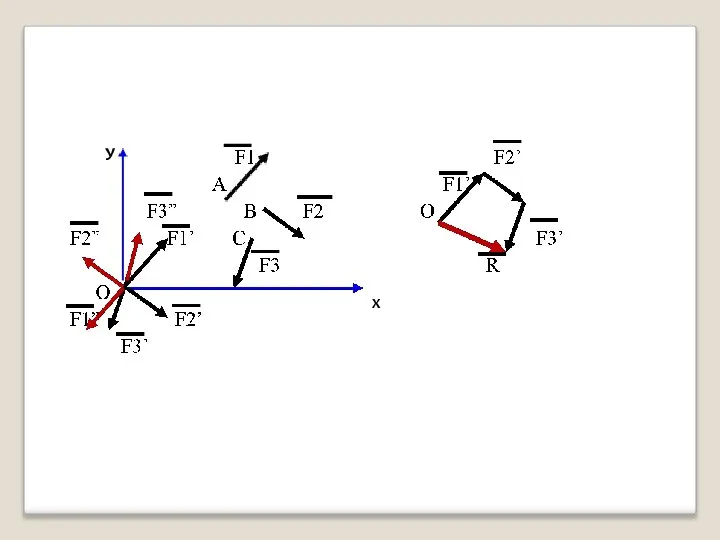
- 8. Плоская произвольная система сил На твердое тело действует произвольная система сил F1, F2, F3 (рис.1.17,а). Приложим
- 9. Х У
- 10. Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И система пар сил с моментами
- 11. В результате приведения всех сил к точке, определяем, что Произвольную плоскую систему сил можно заменить одной
- 12. Точка О – называется центром приведения. Вектор R – главный вектор не зависит от центра приведения.
- 14. Скачать презентацию
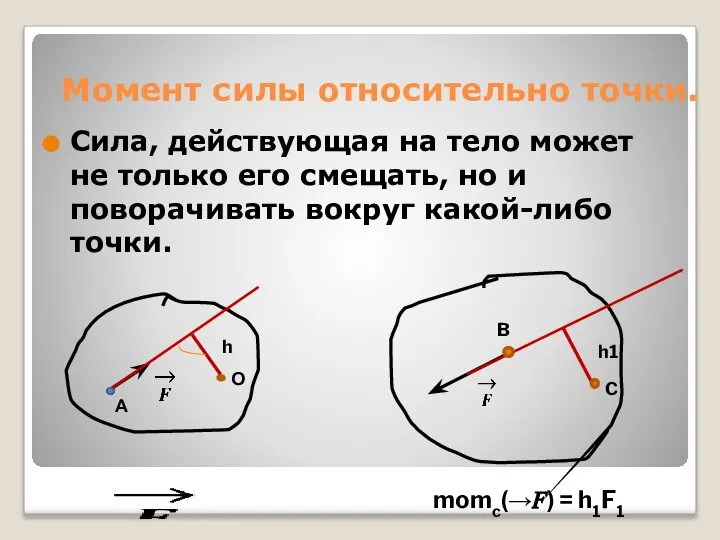
Момент силы относительно точки.
Сила, действующая на тело может не только
Момент силы относительно точки.
Сила, действующая на тело может не только
Моментом силы F относительно центра О называется величина, равная произведению силы
Моментом силы F относительно центра О называется величина, равная произведению силы
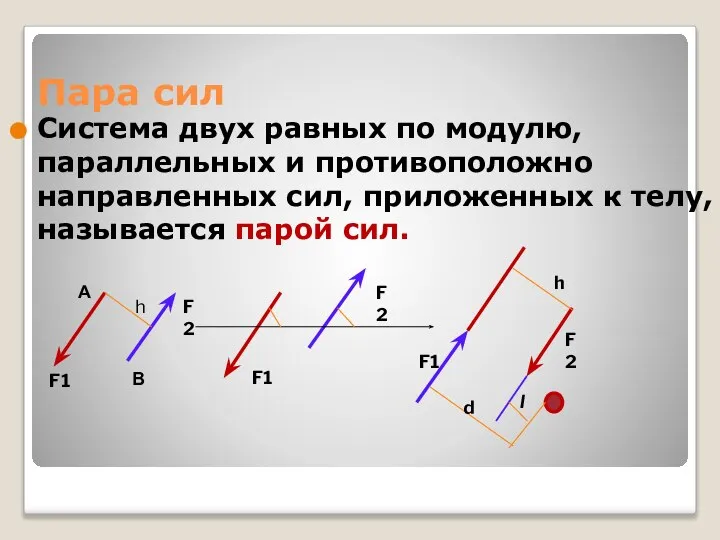
Пара сил
Система двух равных по модулю, параллельных и противоположно направленных сил,
Пара сил
Система двух равных по модулю, параллельных и противоположно направленных сил,

Момент пары сил
Плечом пары сил называется кратчайшее расстояние между линиями действия
Момент пары сил
Плечом пары сил называется кратчайшее расстояние между линиями действия

Свойства пары сил
Свойства пары сил

Контрольные вопросы
1. Что такое сила?
2. Какие силы называются уравновешивающими?
3. Что называется
Контрольные вопросы
1. Что такое сила?
2. Какие силы называются уравновешивающими?
3. Что называется
Плоская произвольная система сил
На твердое тело действует произвольная система сил F1,
Плоская произвольная система сил
На твердое тело действует произвольная система сил F1,
Х
У
Х
У

Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И
Теперь на тело действует система сходящихся сил F1’, F2’, F3’. И
В результате приведения всех сил к точке, определяем, что Произвольную плоскую
В результате приведения всех сил к точке, определяем, что Произвольную плоскую
Точка О – называется центром приведения.
Вектор R – главный вектор не
Точка О – называется центром приведения.
Вектор R – главный вектор не
 Числовые выражения
Числовые выражения Математический штурм
Математический штурм Презентация по математике "Перестановка слагаемых" - скачать бесплатно
Презентация по математике "Перестановка слагаемых" - скачать бесплатно Аксиомы стереомотрии
Аксиомы стереомотрии Случаи сложения и вычитания, основанные на знании нумерации чиселм
Случаи сложения и вычитания, основанные на знании нумерации чиселм Интегральное исчисление
Интегральное исчисление Достроить недостающие проекции отрезка АВ. (задача 13)
Достроить недостающие проекции отрезка АВ. (задача 13) Аттестационная работа. Методическая разработка образовательного практикума Поэзия праздника, предмет - математика, 5 класс
Аттестационная работа. Методическая разработка образовательного практикума Поэзия праздника, предмет - математика, 5 класс Презентация по математике "Занимательные математические задачи. Математические ребусы" - скачать
Презентация по математике "Занимательные математические задачи. Математические ребусы" - скачать  Бетта-функция Эйлера
Бетта-функция Эйлера Аттестационная работа. Организация проектной деятельности на уроках математики в основной школе
Аттестационная работа. Организация проектной деятельности на уроках математики в основной школе Нумерация от 1 до 100
Нумерация от 1 до 100 Функции и их свойства
Функции и их свойства Симметрия в природе
Симметрия в природе Волшебная страна - Геометрия. Занятие 3
Волшебная страна - Геометрия. Занятие 3 Письменный приём умножения
Письменный приём умножения Математическая обработка результатов исследований
Математическая обработка результатов исследований Решение текстовых задач
Решение текстовых задач Решение задач с величинами: цена, количество, стоимость
Решение задач с величинами: цена, количество, стоимость Презентация по математике "Числа Фибоначчи" - скачать
Презентация по математике "Числа Фибоначчи" - скачать  Умножение одночлена на многочлен
Умножение одночлена на многочлен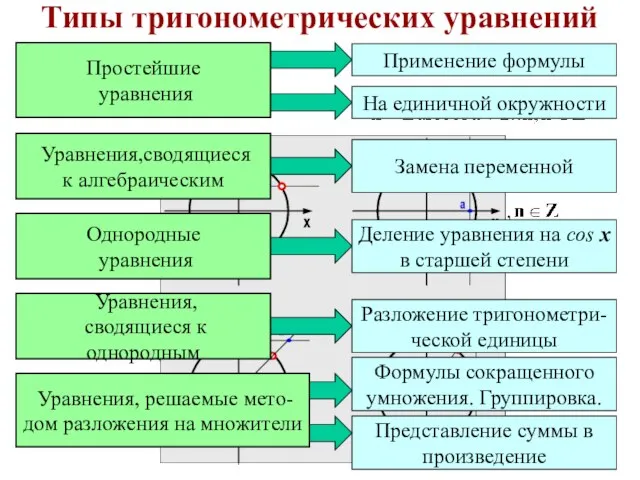 Типы тригонометрических уравнений
Типы тригонометрических уравнений Применение дифференциала для приближенных вычислений. (Лекция 2)
Применение дифференциала для приближенных вычислений. (Лекция 2) Корреляционный анализ
Корреляционный анализ Классы интегрируемых функций. Интегрирование иррациональных выражений
Классы интегрируемых функций. Интегрирование иррациональных выражений Презентация по математике "Задания тестового характера на заполнение пропусков" - скачать
Презентация по математике "Задания тестового характера на заполнение пропусков" - скачать  Решение задач по теореме Пифагора
Решение задач по теореме Пифагора Числовая окружность в координатной плоскости
Числовая окружность в координатной плоскости