- ТПР. Метод однофакторной оптимизации. (Занятие 4)

Содержание
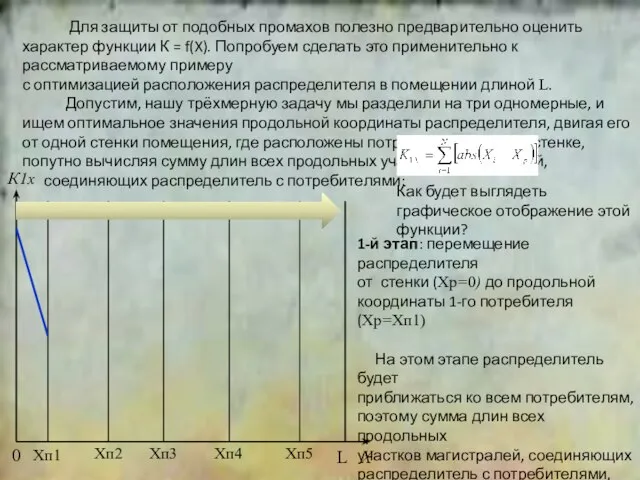
- 2. 2 Для защиты от подобных промахов полезно предварительно оценить характер функции К = f(X). Попробуем сделать
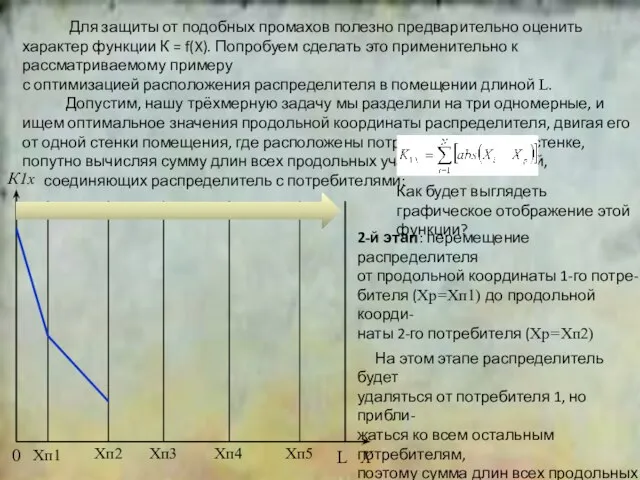
- 3. 2 Для защиты от подобных промахов полезно предварительно оценить характер функции К = f(X). Попробуем сделать
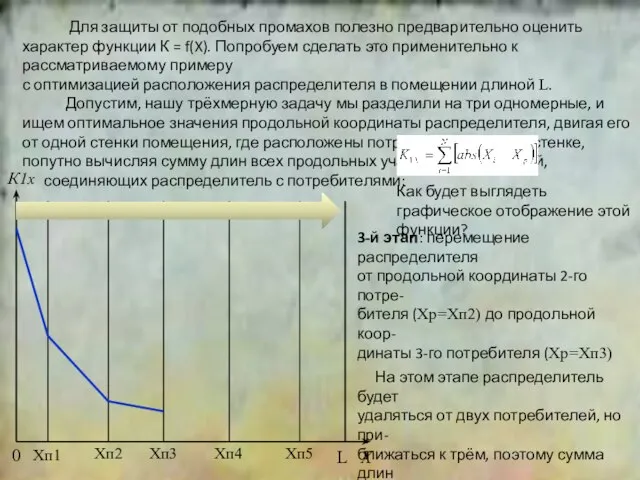
- 4. 2 Для защиты от подобных промахов полезно предварительно оценить характер функции К = f(X). Попробуем сделать
- 5. 2 Для защиты от подобных промахов полезно предварительно оценить характер функции К = f(X). Попробуем сделать
- 6. 2 Для защиты от подобных промахов полезно предварительно оценить характер функции К = f(X). Попробуем сделать
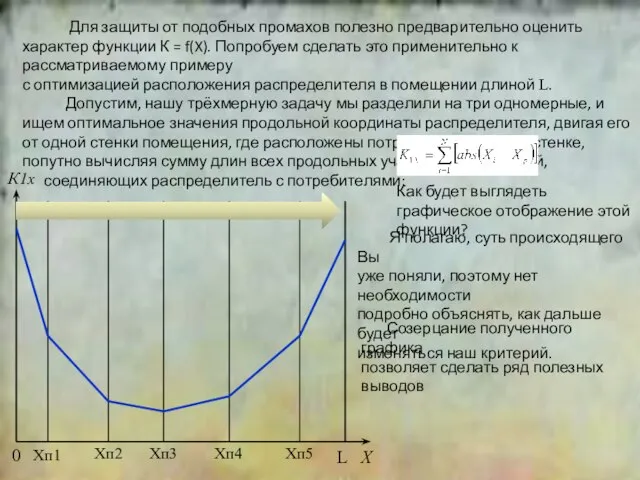
- 7. 2 ВЫВОД 1: Зависимость суммы длин продольных участков магистралей от продольной координаты распределителя является кусочно-линейной функцией,
- 8. 2 Разобравшись с однопараметрическим прогнозированием, двигаемся дальше
- 9. 2 5. МНОГОПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ ОБЪЕКТ ОПТИМИЗАЦИИ . . . . . . . Хn Х1 Х2
- 10. 2 Папуасы Новой Гвинеи, культуру и быт которых исследовал русский этнограф, антрополог, биолог и путешественник Николай
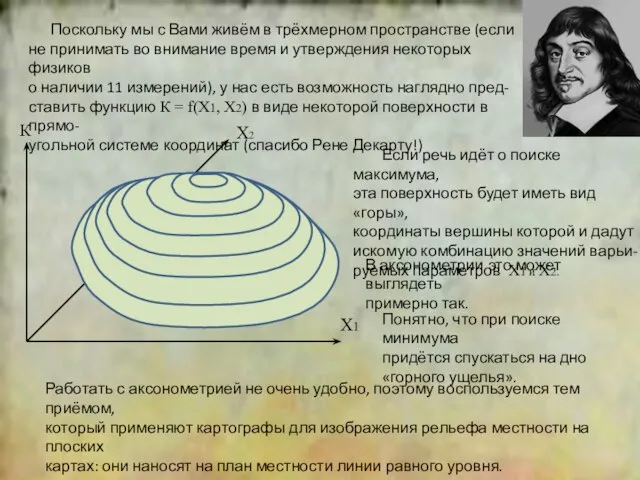
- 11. 2 Поскольку мы с Вами живём в трёхмерном пространстве (если не принимать во внимание время и
- 13. Скачать презентацию
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции

2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции
2
Для защиты от подобных промахов полезно предварительно оценить характер функции

2
ВЫВОД 1:
Зависимость суммы длин продольных участков магистралей от продольной координаты
распределителя является
2
ВЫВОД 1:
Зависимость суммы длин продольных участков магистралей от продольной координаты
распределителя является

2
Разобравшись с однопараметрическим прогнозированием, двигаемся дальше
2
Разобравшись с однопараметрическим прогнозированием, двигаемся дальше

2
5. МНОГОПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ
ОБЪЕКТ
ОПТИМИЗАЦИИ
. . . . . . .
Хn
Х1
Х2
К
Кmax
Кmin
или
{Х1*, Х2*, .
2
5. МНОГОПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ
ОБЪЕКТ
ОПТИМИЗАЦИИ
. . . . . . .
Хn
Х1
Х2
К
Кmax
Кmin
или
{Х1*, Х2*, .

2
Папуасы Новой Гвинеи, культуру и быт которых исследовал русский этнограф, антрополог,
2
Папуасы Новой Гвинеи, культуру и быт которых исследовал русский этнограф, антрополог,
2
Поскольку мы с Вами живём в трёхмерном пространстве (если
не
2
Поскольку мы с Вами живём в трёхмерном пространстве (если
не
 Стивен Р. Кови. 7 навыков высокоэффективных людей
Стивен Р. Кови. 7 навыков высокоэффективных людей Анализ типичных ошибок кандидатов на вакантные должности при прохождении интервью в кадровом агентстве
Анализ типичных ошибок кандидатов на вакантные должности при прохождении интервью в кадровом агентстве Стратегический подход к управлению персоналом
Стратегический подход к управлению персоналом Управление конфликтами в компании
Управление конфликтами в компании Стратегия управления персоналом: понятие, связь с кадровой политикой
Стратегия управления персоналом: понятие, связь с кадровой политикой Классификация инновации
Классификация инновации Механизм технологии распределенного реестра при логистических операциях отслеживания
Механизм технологии распределенного реестра при логистических операциях отслеживания Повышение эффективности управления человеческими ресурсами в рамках складского комплекса
Повышение эффективности управления человеческими ресурсами в рамках складского комплекса Этикет в деловом диалоге по телефону
Этикет в деловом диалоге по телефону O introducere în SCRUM
O introducere în SCRUM Механизация погрузочно-разгрузочных работ. Комплексная механизация
Механизация погрузочно-разгрузочных работ. Комплексная механизация Методология менеджмента
Методология менеджмента Управление образовательной организацией. Структура управления
Управление образовательной организацией. Структура управления Проверка рекомендаций и послужного списка
Проверка рекомендаций и послужного списка Стратегический менеджмент. Оценка и выбор лучших стратегий. Выполнение стратегий
Стратегический менеджмент. Оценка и выбор лучших стратегий. Выполнение стратегий POLYCASE 2019. Чемпионат по решению реальной производственной задачи
POLYCASE 2019. Чемпионат по решению реальной производственной задачи Приглашаем на работу
Приглашаем на работу Организация и контроль использования времени
Организация и контроль использования времени 1С:ERP Управление предприятием 2. Поддержка 54-ФЗ в интеграции с Яндекс.Кассой
1С:ERP Управление предприятием 2. Поддержка 54-ФЗ в интеграции с Яндекс.Кассой Презентация плана на 2021 год Оф. Панина
Презентация плана на 2021 год Оф. Панина Financial management function PART A
Financial management function PART A Мои первые 100 дней на должности руководителя
Мои первые 100 дней на должности руководителя Теория принятия управленческих решений. Лекция 1
Теория принятия управленческих решений. Лекция 1 Вебинар: Пошаговый план автоматизации склада
Вебинар: Пошаговый план автоматизации склада Личная эффективность. Успешный человек, лидер
Личная эффективность. Успешный человек, лидер Организация, как объект исследования и проектирования
Организация, как объект исследования и проектирования Деловые коммуникации. Методика и тактика проведения деловой беседы и совещания
Деловые коммуникации. Методика и тактика проведения деловой беседы и совещания Профессия риэлтор
Профессия риэлтор