- Численное моделирование стержневых систем (лекция 1)

Содержание
- 2. Основная литература 1. MIDAS Family Programs. http://www.midasit.ru. 2. О. Зенкевич Метод конечных элементов в технике. М.:
- 3. Метод конечных элементов (МКЭ) — численный метод решения дифференциальных уравнений с частными производными, решения интегральных уравнений,
- 4. 1956 г. - Р. Клафф - опубликована первая работа, в которой была представлена современная концепция МКЭ;
- 5. 1960–1965 г.г. разработаны основные соотношения МКЭ на основе вариационных принципов – метод стало возможным использовать не
- 6. Метод конечных элементов основан на математическом представлении реальной сплошной конструкции ее дискретной моделью (конечные элементы объединяются
- 7. 1 – исходная конструкция и нагрузка на нее; 2 – оптимизация конструкции для создания модели –
- 8. В узлах на систему накладываются граничные условия (закрепления), прикладываются внешние силы, задаются свойства материала, ищется решение
- 9. Основное уравнение МКЭ для статических расчетов связывает эти два вектора (1.1) где {R} – вектор узловых
- 10. Уравнение (1.1) является частью полное уравнение движения для статических и динамических расчетов (1.2) где [M] –
- 11. Для перехода от узловых перемещений к перемещениям (напряжениям, деформациям) в любой точке рассматриваемой области применяют интерполяционные
- 12. Примеры интерполяционных функций для стержневых элементов. Линейный полином где r – локальная координата одномерного элемента Локальные
- 13. Квадратичный полином
- 14. Кубический полином
- 15. Отсюда следует важное правило МКЭ – для повышения точности расчета в большинстве случаев следует применять более
- 16. В общем виде элементы матрицы жесткости определяются по формуле , (1.4) где [B] – матрица дифференциальных
- 17. Поскольку в МКЭ интегрирование выполняется численно, то рабочая формула для расчета элементов матрицы жесткости имеет вид
- 18. ri
- 19. Перемещения в узлах конечных элементов определяются также соответствующими степенями свободы. В балочных стержневых КЭ в общем
- 21. Скачать презентацию
Основная литература
1. MIDAS Family Programs. http://www.midasit.ru.
2. О. Зенкевич Метод конечных элементов в технике.
1. MIDAS Family Programs. http://www.midasit.ru.
2. О. Зенкевич Метод конечных элементов в технике.

Метод конечных элементов (МКЭ) — численный метод
решения дифференциальных уравнений с частными
Метод конечных элементов (МКЭ) — численный метод
решения дифференциальных уравнений с частными
1956 г. - Р. Клафф
- опубликована первая работа, в которой была
1956 г. - Р. Клафф
- опубликована первая работа, в которой была

1960–1965 г.г.
разработаны основные соотношения МКЭ на основе вариационных принципов – метод
1960–1965 г.г.
разработаны основные соотношения МКЭ на основе вариационных принципов – метод
Метод конечных элементов основан на
математическом представлении реальной сплошной конструкции ее дискретной
Метод конечных элементов основан на
математическом представлении реальной сплошной конструкции ее дискретной

1 – исходная конструкция и нагрузка на нее;
2 – оптимизация конструкции
1 – исходная конструкция и нагрузка на нее;
2 – оптимизация конструкции

В узлах
на систему накладываются граничные условия (закрепления),
прикладываются внешние силы,
задаются
В узлах
на систему накладываются граничные условия (закрепления),
прикладываются внешние силы,
задаются
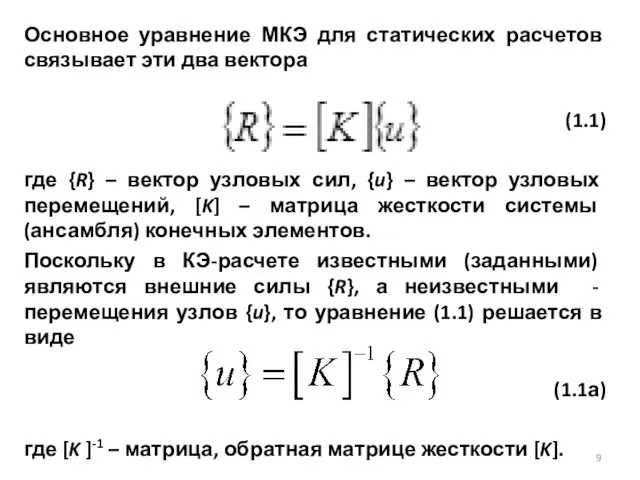
Основное уравнение МКЭ для статических расчетов связывает эти два вектора
(1.1)
где
Основное уравнение МКЭ для статических расчетов связывает эти два вектора
(1.1)
где

Уравнение (1.1) является частью полное уравнение движения
для статических и динамических расчетов
(1.2)
где
для статических и динамических расчетов
(1.2)
где
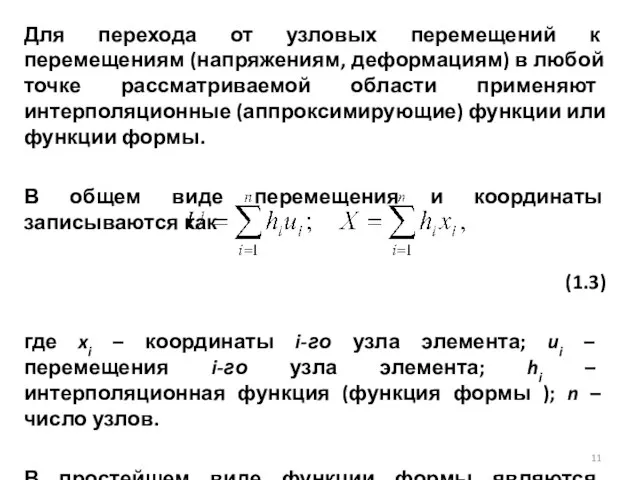
Для перехода от узловых перемещений к перемещениям (напряжениям, деформациям) в любой
Для перехода от узловых перемещений к перемещениям (напряжениям, деформациям) в любой

Примеры интерполяционных функций для стержневых элементов.
Линейный полином
где r – локальная координата
Примеры интерполяционных функций для стержневых элементов.
Линейный полином
где r – локальная координата

Квадратичный полином
Квадратичный полином

Кубический полином
Кубический полином
Отсюда следует важное правило МКЭ
– для повышения точности расчета в большинстве
Отсюда следует важное правило МКЭ
– для повышения точности расчета в большинстве
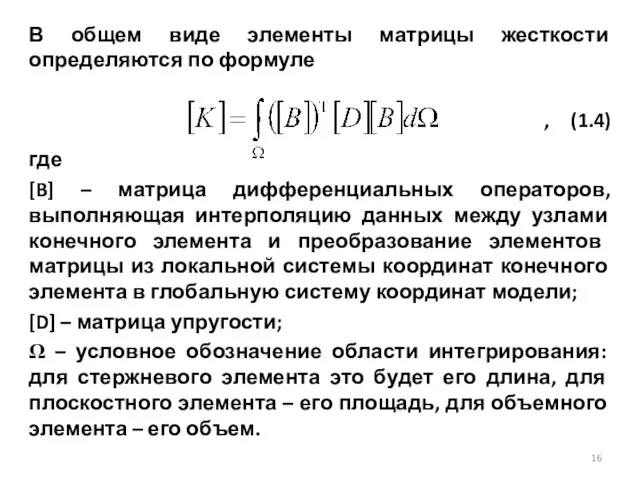
В общем виде элементы матрицы жесткости определяются по формуле
, (1.4)
где
[B]
В общем виде элементы матрицы жесткости определяются по формуле
, (1.4)
где
[B]

Поскольку в МКЭ интегрирование выполняется численно, то рабочая формула для расчета
Поскольку в МКЭ интегрирование выполняется численно, то рабочая формула для расчета

ri
ri

Перемещения в узлах конечных элементов определяются также соответствующими степенями свободы.
В балочных
Перемещения в узлах конечных элементов определяются также соответствующими степенями свободы.
В балочных
 Как уговорить родителей завести собаку
Как уговорить родителей завести собаку Ископаемые углеводороды. Подготовка и первичная переработка ископаемых углеводородов
Ископаемые углеводороды. Подготовка и первичная переработка ископаемых углеводородов День семьи любви и верности
День семьи любви и верности августа 2020 года (1)
августа 2020 года (1) Портфолио. Инертбаева Гульнара Сериковна
Портфолио. Инертбаева Гульнара Сериковна Асинхронный электропривод с векторным управлением
Асинхронный электропривод с векторным управлением Вязовская сельская библиотека
Вязовская сельская библиотека Литературное чтение
Литературное чтение Образ Александра Невского в культуре и искусстве
Образ Александра Невского в культуре и искусстве Prezentatsia-susarkina
Prezentatsia-susarkina OpCon - Control engineering for Bosch
OpCon - Control engineering for Bosch Лабораторная работа №1. Основы архитектуры компьютера. Персональный компьютер и его основные устройства
Лабораторная работа №1. Основы архитектуры компьютера. Персональный компьютер и его основные устройства Зерновые корма
Зерновые корма 20130223_25._psihologicheskaya_uravnoveshennost
20130223_25._psihologicheskaya_uravnoveshennost Дана - консультант по продуктовым характеристикам табачной компании JTI
Дана - консультант по продуктовым характеристикам табачной компании JTI Экскурсия на Мосфильм
Экскурсия на Мосфильм Is a suspension railway in Wuppertal, Germany
Is a suspension railway in Wuppertal, Germany նարեկ
նարեկ Замечания выявленные по службам в мае 2022 года при проведении КМО
Замечания выявленные по службам в мае 2022 года при проведении КМО Saas (1)
Saas (1) Культурно-религиозные традиции в международных отношениях
Культурно-религиозные традиции в международных отношениях Духовное просветительство Архиепископа Сильвестра - Святого новомученика и исповедника Российской Русской православной церкви
Духовное просветительство Архиепископа Сильвестра - Святого новомученика и исповедника Российской Русской православной церкви Respond & Achieve. Цифровая транкинговая система Hytera XPT
Respond & Achieve. Цифровая транкинговая система Hytera XPT Презентация защиты(8)
Презентация защиты(8) Виды складов материальных ценностей
Виды складов материальных ценностей Сравнение российских производителей видеоигр с зарубежными
Сравнение российских производителей видеоигр с зарубежными Партфолио. Смирнова Эвелина
Партфолио. Смирнова Эвелина Д.Биссет
Д.Биссет