- Электромеханические системы (электропривод). Механическая часть электропривода

Содержание
- 2. Литература Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство ЮУрГУ. 2006. -
- 3. РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
- 4. Кинематическая схема дает представление об идеальных кинематических связях между движущимися массами конкретной установки, не учитывается деформации
- 5. С помощью кинематической схемы необходимо составить расчетную схему механической части электропривода, в которой все моменты инерции,
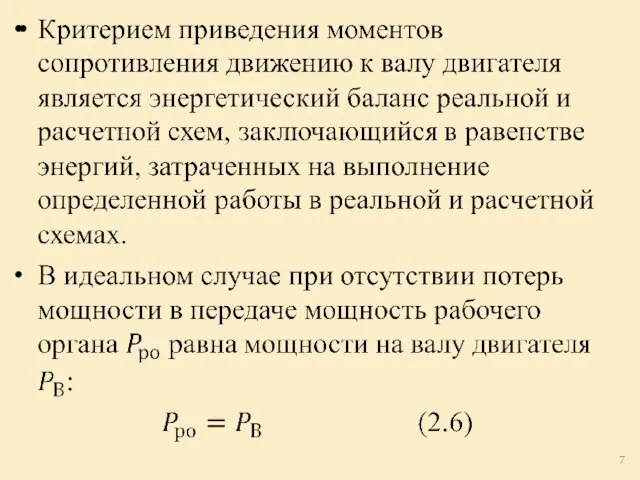
- 6. ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ К ВАЛУ ДВИГАТЕЛЯ
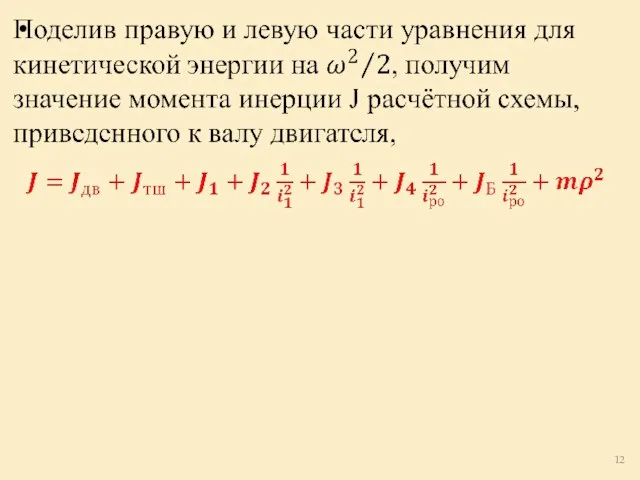
- 10. ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ К ВАЛУ ДВИГАТЕЛЯ
- 14. Радиус приведения ρ и приведенный момент инерции Jпр могут быть переменными величинами
- 15. Учет потерь в передачах. Метод КПД
- 17. Метод разделения потерь
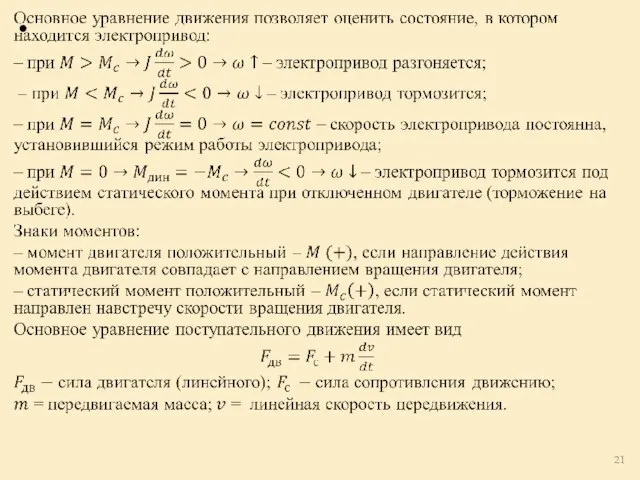
- 19. Уравнение движения электропривода
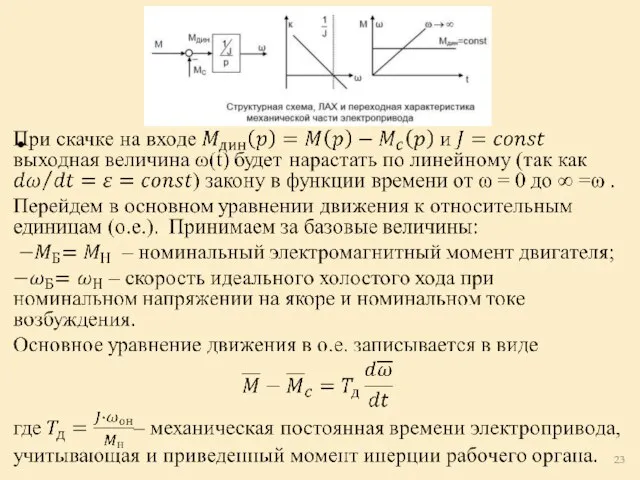
- 22. Механическая часть электропривода как объект управления
- 24. Переходные процессы механической части электропривода
- 27. Отсюда виден физический смысл ТД: «Механическая постоянная времени электропривода ТД есть время, в течение которого двигатель
- 28. Расчет угла поворота
- 30. ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
- 34. МЕХАНИЧЕСКАЯ ЧАСТЬ ЭЛЕКТРОПРИВОДА С УПРУГОЙ СВЯЗЬЮ
- 38. Величину 1/С, обратную жесткости, называют податливостью. Физически податливость определяет деформацию элемента под воздействием упругого момента, а
- 39. ПРИВЕДЕНИЕ УПРУГОСТИ К ВАЛУ ДВИГАТЕЛЯ
- 42. ПРИВЕДЕНИЕ МНОГОМАССОВОЙ УПРУГОЙ СИСТЕМЫ К ДВУХМАССОВОЙ
- 43. Рассмотрим упругую систему с одним упругим элементом – схему электропривода вентилятора При наличии упругих элементов не
- 45. Обычно многомассовую систему приводят к наиболее податливому звену (С2), при этом вращающиеся массы с малыми моментами
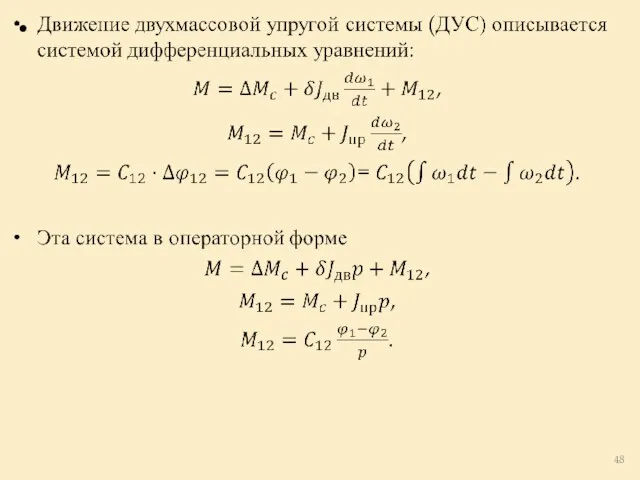
- 47. УРАВНЕНИЯ ДВИЖЕНИЯ И СТРУКТУРНАЯ СХЕМА ДВУХМАССОВОЙ УПРУГОЙ СИСТЕМЫ
- 53. Амплитудно-частотная характеристика
- 54. Переходной процесс в двухмассовой системе
- 55. К чему приводят гибкие связи?
- 56. Вязкое трение
- 59. Переходные процессы в двухмассовой упругой системе с зазором
- 60. Динамические колебательные процессы в среднем не влияют на длительность переходных процессов, но отрицательно сказываются на условия
- 62. Скачать презентацию
Литература
Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство
Литература
Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство
РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
Кинематическая схема дает представление об идеальных кинематических связях между движущимися массами
Кинематическая схема дает представление об идеальных кинематических связях между движущимися массами
С помощью кинематической схемы необходимо составить расчетную схему механической части электропривода,
С помощью кинематической схемы необходимо составить расчетную схему механической части электропривода,

ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ К ВАЛУ ДВИГАТЕЛЯ
ПРИВЕДЕНИЕ МОМЕНТОВ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ К ВАЛУ ДВИГАТЕЛЯ


ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ К ВАЛУ ДВИГАТЕЛЯ
ПРИВЕДЕНИЕ МОМЕНТОВ ИНЕРЦИИ К ВАЛУ ДВИГАТЕЛЯ



Радиус приведения ρ и приведенный момент инерции Jпр могут быть переменными
Радиус приведения ρ и приведенный момент инерции Jпр могут быть переменными
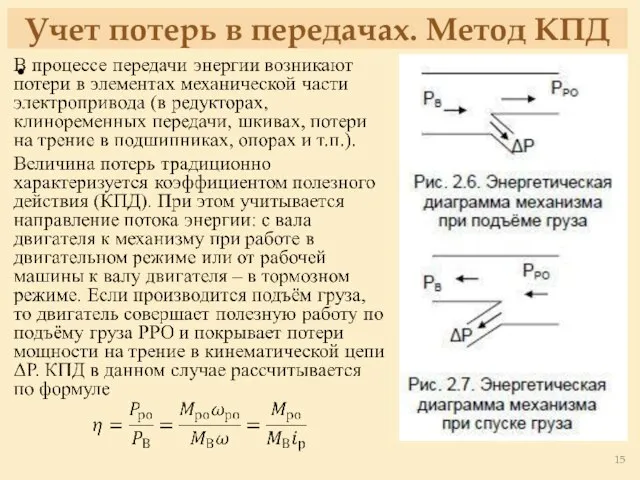
Учет потерь в передачах. Метод КПД
Учет потерь в передачах. Метод КПД

Метод разделения потерь
Метод разделения потерь


Уравнение движения электропривода
Уравнение движения электропривода


Механическая часть электропривода как объект управления
Механическая часть электропривода как объект управления
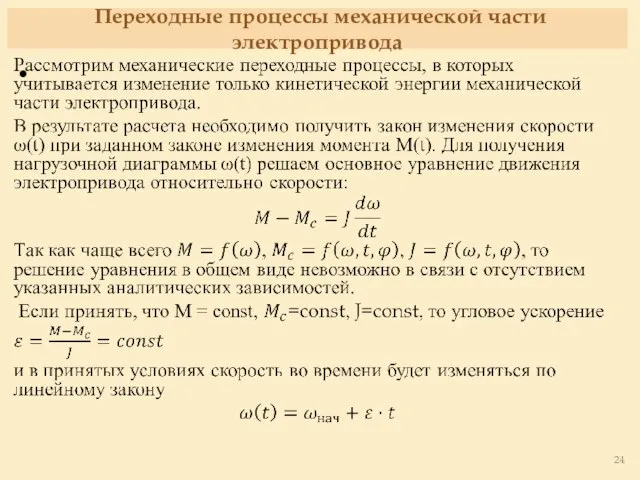
Переходные процессы механической части электропривода
Переходные процессы механической части электропривода


Отсюда виден физический смысл ТД:
«Механическая постоянная времени электропривода ТД есть время,
Отсюда виден физический смысл ТД:
«Механическая постоянная времени электропривода ТД есть время,
Расчет угла поворота
Расчет угла поворота


ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА
ОПТИМАЛЬНОЕ ПЕРЕДАТОЧНОЕ ЧИСЛО РЕДУКТОРА


МЕХАНИЧЕСКАЯ ЧАСТЬ ЭЛЕКТРОПРИВОДА С УПРУГОЙ СВЯЗЬЮ
МЕХАНИЧЕСКАЯ ЧАСТЬ ЭЛЕКТРОПРИВОДА С УПРУГОЙ СВЯЗЬЮ


Величину 1/С, обратную жесткости, называют податливостью. Физически податливость определяет деформацию элемента
Величину 1/С, обратную жесткости, называют податливостью. Физически податливость определяет деформацию элемента
ПРИВЕДЕНИЕ УПРУГОСТИ К ВАЛУ ДВИГАТЕЛЯ
ПРИВЕДЕНИЕ УПРУГОСТИ К ВАЛУ ДВИГАТЕЛЯ


ПРИВЕДЕНИЕ МНОГОМАССОВОЙ УПРУГОЙ СИСТЕМЫ К ДВУХМАССОВОЙ
ПРИВЕДЕНИЕ МНОГОМАССОВОЙ УПРУГОЙ СИСТЕМЫ К ДВУХМАССОВОЙ

Рассмотрим упругую систему с одним упругим элементом – схему электропривода вентилятора
При
Рассмотрим упругую систему с одним упругим элементом – схему электропривода вентилятора
При

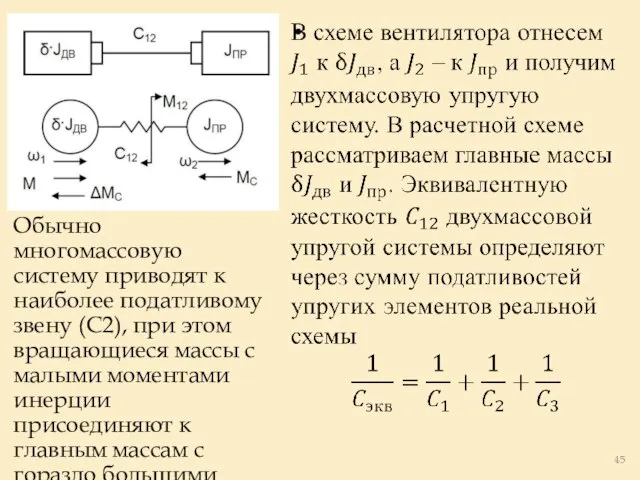
Обычно многомассовую систему приводят к наиболее податливому звену (С2), при этом
Обычно многомассовую систему приводят к наиболее податливому звену (С2), при этом

УРАВНЕНИЯ ДВИЖЕНИЯ И СТРУКТУРНАЯ СХЕМА ДВУХМАССОВОЙ УПРУГОЙ
СИСТЕМЫ
УРАВНЕНИЯ ДВИЖЕНИЯ И СТРУКТУРНАЯ СХЕМА ДВУХМАССОВОЙ УПРУГОЙ
СИСТЕМЫ




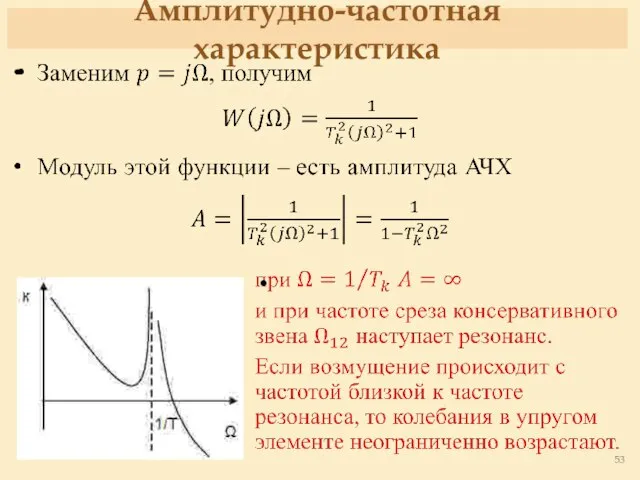
Амплитудно-частотная характеристика
Амплитудно-частотная характеристика

Переходной процесс в двухмассовой системе
Переходной процесс в двухмассовой системе
К чему приводят гибкие связи?
К чему приводят гибкие связи?
Вязкое трение
Вязкое трение


Переходные процессы в двухмассовой
упругой системе с зазором
Переходные процессы в двухмассовой
упругой системе с зазором

Динамические колебательные процессы в среднем не влияют на длительность переходных процессов,
Динамические колебательные процессы в среднем не влияют на длительность переходных процессов,
 Раздельные пункты. Системы регулирования и обеспечения безопасности движения поездов
Раздельные пункты. Системы регулирования и обеспечения безопасности движения поездов Сафонова. Правила набора и оформления текста
Сафонова. Правила набора и оформления текста Ethernet Controller Selector
Ethernet Controller Selector Действие физических факторов на организм человека
Действие физических факторов на организм человека Obrazets_1
Obrazets_1 Строительное производство
Строительное производство Цифровое эфирное телевидение в Республике Башкортостан
Цифровое эфирное телевидение в Республике Башкортостан Лицом к лицу Задание, другой формат
Лицом к лицу Задание, другой формат Углеводы
Углеводы Исследование использования промышленных отходов для производства полимербетона в рамках развития зеленого строительства
Исследование использования промышленных отходов для производства полимербетона в рамках развития зеленого строительства По лесным тропинкам
По лесным тропинкам Dostoprimechatelnosti
Dostoprimechatelnosti Мытье головы
Мытье головы Путешествие в прошлое кресла
Путешествие в прошлое кресла Разработка и планирование системы технической диагностики состояния вводов силовых трансформаторов мощностью 40 МВ*А
Разработка и планирование системы технической диагностики состояния вводов силовых трансформаторов мощностью 40 МВ*А Самопроверка № 226
Самопроверка № 226 20140119_zhizn_i_tvorchestvo_gogolya
20140119_zhizn_i_tvorchestvo_gogolya БАННЕР2
БАННЕР2 Бабушкин В.А._28.09.2021
Бабушкин В.А._28.09.2021 Оборудование для проведения деловых мероприятий
Оборудование для проведения деловых мероприятий 20130419_test
20130419_test Портфолио. Виряскин Григорий Николаевич
Портфолио. Виряскин Григорий Николаевич Chrysomeliformia
Chrysomeliformia Детский проект кошки
Детский проект кошки Интерактивная игра И в шутку и всерьёз. 2 класс
Интерактивная игра И в шутку и всерьёз. 2 класс Алюминий и сплавы алюминия
Алюминий и сплавы алюминия Триаж система
Триаж система Электрические шлифовальные машины
Электрические шлифовальные машины