- Проектирование и моделирование мехатронных и робототехнических систем

Содержание
- 2. Цели и задачи Постановка задачи разработки системы Разработка и создание 3D модели Моделирование модели в среде
- 3. Задачи разработки системы Возможность ограничения постоянного доступа к корму Контроль за размером порции Достаточное количество корма
- 4. Разработка алгоритма подачи корма
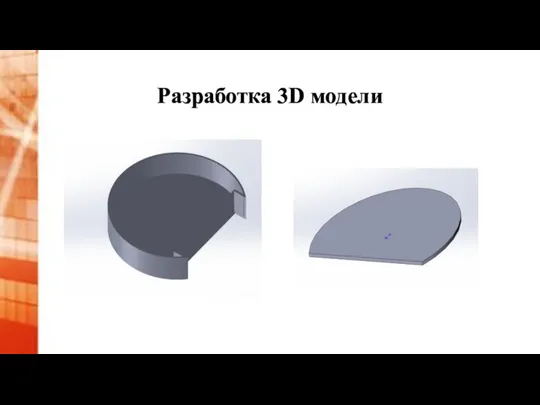
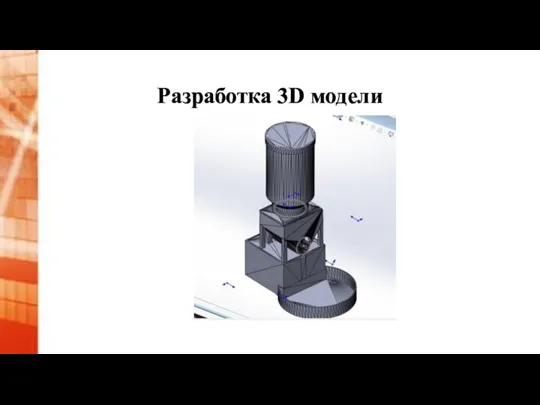
- 5. Разработка 3D модели Таким образом, необходимо создать 3D модель кормушки, состоящую из: Контейнера для хранения корма
- 6. Разработка 3D модели
- 7. Разработка 3D модели
- 8. Разработка 3D модели
- 9. Разработка 3D модели
- 10. Разработка 3D модели
- 11. ИМПОРТ 3D-МОДЕЛИ В MATLAB
- 12. ИМПОРТ 3D-МОДЕЛИ В MATLAB
- 13. УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB Добавление управляющего файла
- 14. УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB
- 16. Вывод графиков
- 17. Вывод графиков скорости координат
- 18. Вывод графика колебания угла поворота
- 19. Итоговая блок-схема
- 21. Скачать презентацию
Цели и задачи
Постановка задачи разработки системы
Разработка и создание 3D модели
Моделирование модели
Цели и задачи
Постановка задачи разработки системы
Разработка и создание 3D модели
Моделирование модели
Задачи разработки системы
Возможность ограничения постоянного доступа к корму
Контроль за размером порции
Достаточное
Задачи разработки системы
Возможность ограничения постоянного доступа к корму
Контроль за размером порции
Достаточное

Разработка алгоритма подачи корма
Разработка алгоритма подачи корма
Разработка 3D модели
Таким образом, необходимо создать 3D модель кормушки, состоящую из:
Контейнера
Разработка 3D модели
Таким образом, необходимо создать 3D модель кормушки, состоящую из:
Контейнера

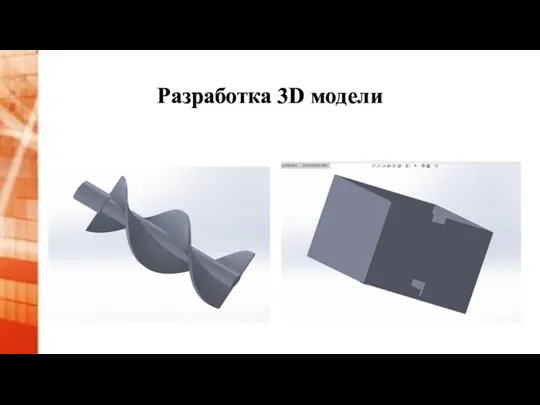
Разработка 3D модели
Разработка 3D модели

Разработка 3D модели
Разработка 3D модели
Разработка 3D модели
Разработка 3D модели
Разработка 3D модели
Разработка 3D модели
Разработка 3D модели
Разработка 3D модели

ИМПОРТ 3D-МОДЕЛИ В MATLAB
ИМПОРТ 3D-МОДЕЛИ В MATLAB

ИМПОРТ 3D-МОДЕЛИ В MATLAB
ИМПОРТ 3D-МОДЕЛИ В MATLAB

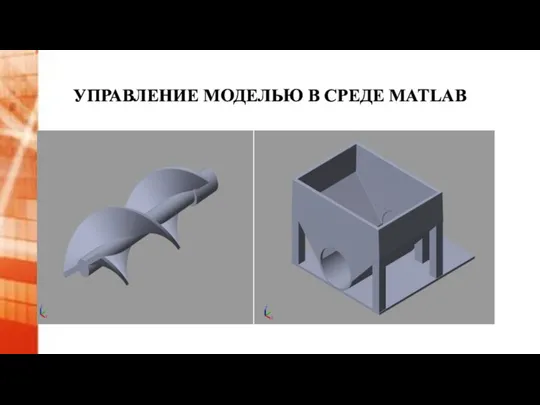
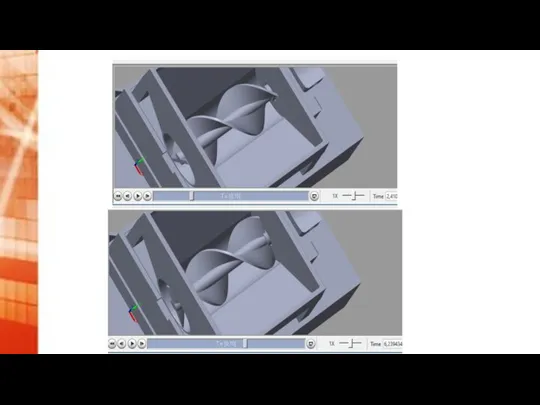
УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB
Добавление управляющего файла
УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB
Добавление управляющего файла
УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB
УПРАВЛЕНИЕ МОДЕЛЬЮ В СРЕДЕ MATLAB

Вывод графиков
Вывод графиков
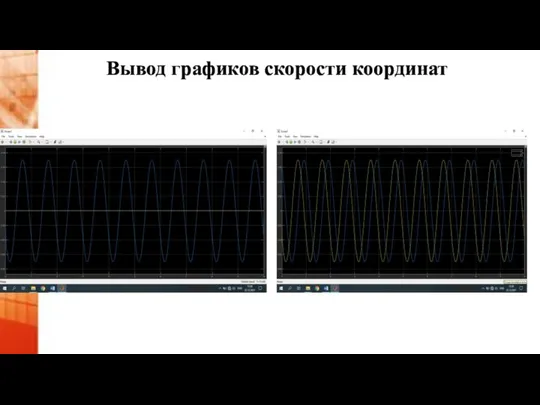
Вывод графиков скорости координат
Вывод графиков скорости координат

Вывод графика колебания угла поворота
Вывод графика колебания угла поворота

Итоговая блок-схема
Итоговая блок-схема
 Оформление страниц авторской книги
Оформление страниц авторской книги Получас
Получас диплом1
диплом1 Профилактика вредных привычек у школьников
Профилактика вредных привычек у школьников Рисование осенних листьев
Рисование осенних листьев Ремесло Научного Доклада
Ремесло Научного Доклада Презентация Microsoft PowerPoint
Презентация Microsoft PowerPoint ПР17
ПР17 23 февраля День Защитника Отечества
23 февраля День Защитника Отечества Электрообогрев зеркал
Электрообогрев зеркал Итоги приемной кампании 2021 года
Итоги приемной кампании 2021 года 20101203_Prishel_uvidel_pobedil
20101203_Prishel_uvidel_pobedil Права ребенка в семье : содержание и защита
Права ребенка в семье : содержание и защита Металлургическая промышленность Казахстана
Металлургическая промышленность Казахстана DVB-T2 - ресиверы, приставки для цифрового телевидения Perfeo
DVB-T2 - ресиверы, приставки для цифрового телевидения Perfeo Прокладка и монтаж кабелей
Прокладка и монтаж кабелей Сознательное и бессознательное в человеке
Сознательное и бессознательное в человеке Разбор пожаров, основные недостатки, выявленные при разборе действий работников при тушении пожаров и ликвидации ЧС
Разбор пожаров, основные недостатки, выявленные при разборе действий работников при тушении пожаров и ликвидации ЧС п.-4.7-Презентация-проекта-_1_
п.-4.7-Презентация-проекта-_1_ Современные технологии. Развитие технологий
Современные технологии. Развитие технологий Микропроцессорные АБ
Микропроцессорные АБ Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint Производство древесно-полимерного профиля
Производство древесно-полимерного профиля Контролінг. Організаційні основи формування та функціонування системи контролінгу на підприємстві
Контролінг. Організаційні основи формування та функціонування системи контролінгу на підприємстві Рождество Христово. События и традиции
Рождество Христово. События и традиции Мультиметр
Мультиметр кл наречия и спортsport_is_fun 16 апр - копия
кл наречия и спортsport_is_fun 16 апр - копия Кирильчук Микола Миколайович
Кирильчук Микола Миколайович