- Реактор

Содержание
- 2. Проблема На данный момент сфера автономных транспортных средств лишь развивается и спрос явно превышает предложения. Для
- 3. Проблема На данный момент созданием автономных роботов для доставки грузов занимается компания Яндекс. Данные роботы производятся
- 4. Идея Для решения поставленной задачи было решено разработать систему для патрулирования территории с системой мониторинга в
- 5. План Разработка системы геопозиционирования и построения маршрута. Создание первого прототипа робота. Доработка шасси с целью увеличения
- 6. Ресурсы 3D принтер FlyingBear Ghost 5 Контроллер Arduino Mega Контроллер Arduino Uno 9-осевой датчик положения GY-85
- 7. Команда Михаил Васильев Капитан команды, разработка геопортала и системы навигации. Владислав Горелов Проектирование и сборка робота.
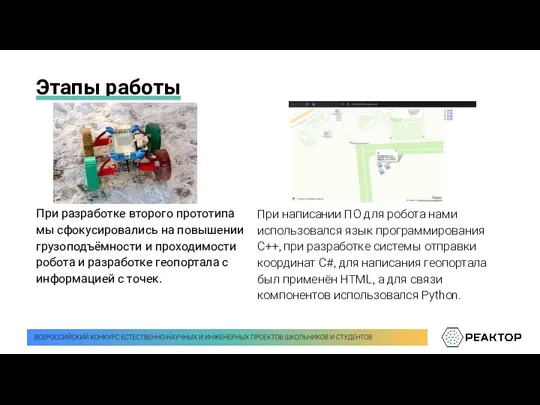
- 8. Этапы работы Главной задачей при разработке первой версии системы было создание рабочей системы отправки координат и
- 9. Этапы работы При написании ПО для робота нами использовался язык программирования C++, при разработке системы отправки
- 10. Результаты На данный момент существующий прототип робота способен передвигаться по пересечённой местности в практически любых погодных
- 11. Результаты Геопортал и система указания координат обладают необходимым минимумом функций для работы и предоставления информации о
- 12. Итоги В результате проделанной работы, был разработан рабочий прототип программно-аппаратного комплекса, в соответствии с поставленной целью
- 14. Скачать презентацию

Проблема
На данный момент сфера автономных транспортных средств лишь развивается и спрос
Проблема
На данный момент сфера автономных транспортных средств лишь развивается и спрос

Проблема
На данный момент созданием автономных роботов для доставки грузов занимается компания
Проблема
На данный момент созданием автономных роботов для доставки грузов занимается компания

Идея
Для решения поставленной задачи было решено разработать систему для патрулирования территории
Идея
Для решения поставленной задачи было решено разработать систему для патрулирования территории
План
Разработка системы геопозиционирования и построения маршрута. Создание первого прототипа робота.
Доработка шасси
План
Разработка системы геопозиционирования и построения маршрута. Создание первого прототипа робота.
Доработка шасси
Ресурсы
3D принтер FlyingBear Ghost 5
Контроллер Arduino Mega
Контроллер Arduino Uno
9-осевой датчик положения
Ресурсы
3D принтер FlyingBear Ghost 5
Контроллер Arduino Mega
Контроллер Arduino Uno
9-осевой датчик положения

Команда
Михаил Васильев
Капитан команды, разработка геопортала и системы навигации.
Владислав Горелов
Проектирование и сборка
Команда
Михаил Васильев
Капитан команды, разработка геопортала и системы навигации.
Владислав Горелов
Проектирование и сборка

Этапы работы
Главной задачей при разработке первой версии системы было создание рабочей
Этапы работы
Главной задачей при разработке первой версии системы было создание рабочей
Этапы работы
При написании ПО для робота нами использовался язык программирования C++,
Этапы работы
При написании ПО для робота нами использовался язык программирования C++,

Результаты
На данный момент существующий прототип робота способен передвигаться по пересечённой местности
Результаты
На данный момент существующий прототип робота способен передвигаться по пересечённой местности
Результаты
Геопортал и система указания координат обладают необходимым минимумом функций для работы
Результаты
Геопортал и система указания координат обладают необходимым минимумом функций для работы

Итоги
В результате проделанной работы, был разработан рабочий прототип программно-аппаратного комплекса, в
Итоги
В результате проделанной работы, был разработан рабочий прототип программно-аппаратного комплекса, в
 Гигиеническое проектирование территорий завода
Гигиеническое проектирование территорий завода Предлагаем выполнение CAD/CAM /CAE работ в системе CATIA v5
Предлагаем выполнение CAD/CAM /CAE работ в системе CATIA v5 Аттестационная работа. Методическая разработка по проектной и исследовательской деятельности колледже легкой промышленности
Аттестационная работа. Методическая разработка по проектной и исследовательской деятельности колледже легкой промышленности Благоверный князь Глеб Белозерский
Благоверный князь Глеб Белозерский Рождественские хроники
Рождественские хроники Шаршаудың биологиялық маңызы
Шаршаудың биологиялық маңызы Отчет по производственной преддипломной практики По специальности 21.05.01 Земельно-имущественные отношения
Отчет по производственной преддипломной практики По специальности 21.05.01 Земельно-имущественные отношения Технологии скрепления книжных блоков
Технологии скрепления книжных блоков Использование художественного образа в проектировании арт-объекта
Использование художественного образа в проектировании арт-объекта Практические работы по художественному оформлению сцены
Практические работы по художественному оформлению сцены Собрание с родителями будущих первоклассников
Собрание с родителями будущих первоклассников Игра – тренажер Части суток
Игра – тренажер Части суток Система обработки почвы под овощные культуры
Система обработки почвы под овощные культуры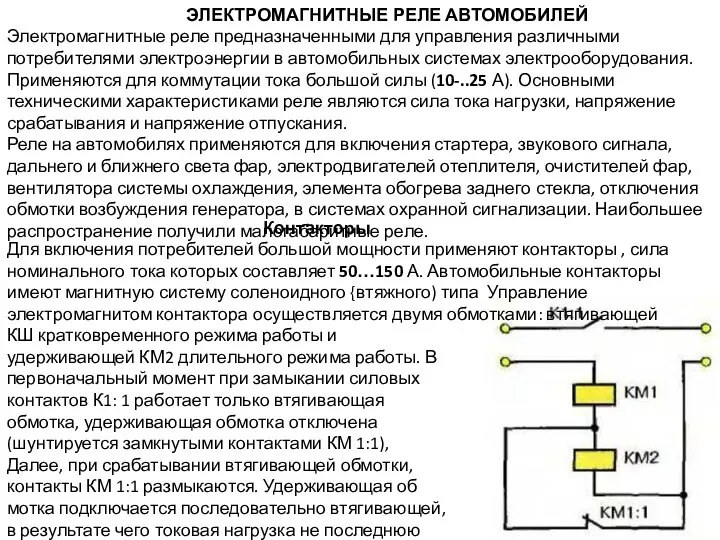 Электромагнитные реле автомобилей
Электромагнитные реле автомобилей Понятие об информационных системах и АИС
Понятие об информационных системах и АИС Книга памяти. Шаблон проекта
Книга памяти. Шаблон проекта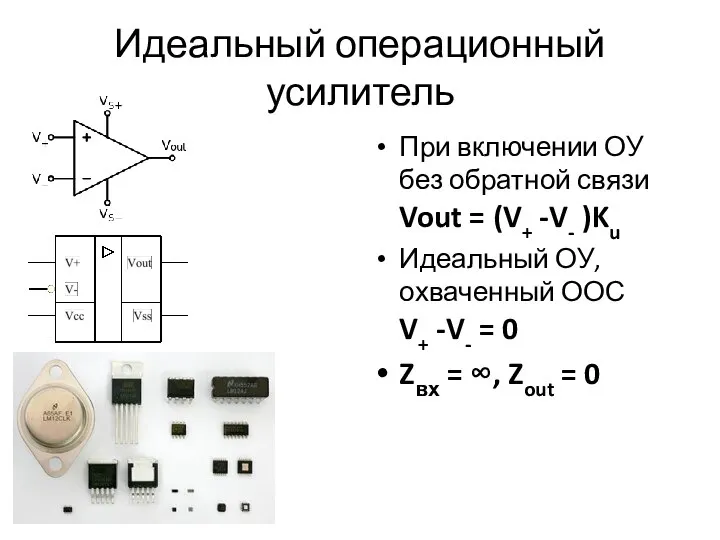 Идеальный операционный усилитель
Идеальный операционный усилитель 20130324_moya_sportivnaya_semya
20130324_moya_sportivnaya_semya Портфолио педагога - Цуров Сергей Андреевич
Портфолио педагога - Цуров Сергей Андреевич Пр. р. 4_Инструментальные средства_Афанасьев Андрей
Пр. р. 4_Инструментальные средства_Афанасьев Андрей information about railway transport
information about railway transport Теоретический чертёж корпуса судна
Теоретический чертёж корпуса судна Единственная в России фабрика кухня Halal
Единственная в России фабрика кухня Halal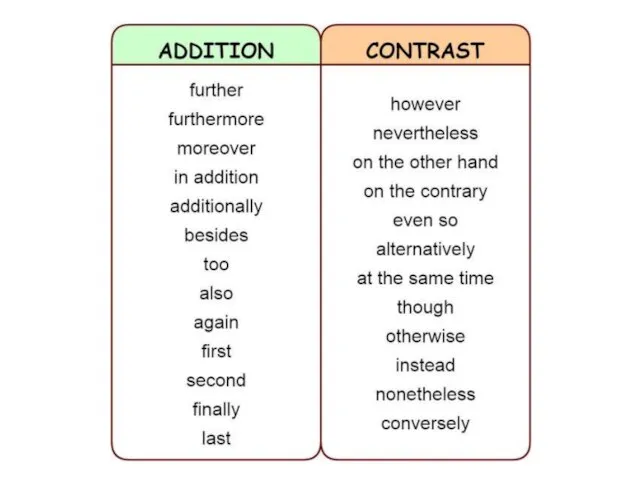 Linking Words Rule
Linking Words Rule Information and communication technologies
Information and communication technologies Презентация. Как развивалась жизнь на Земле
Презентация. Как развивалась жизнь на Земле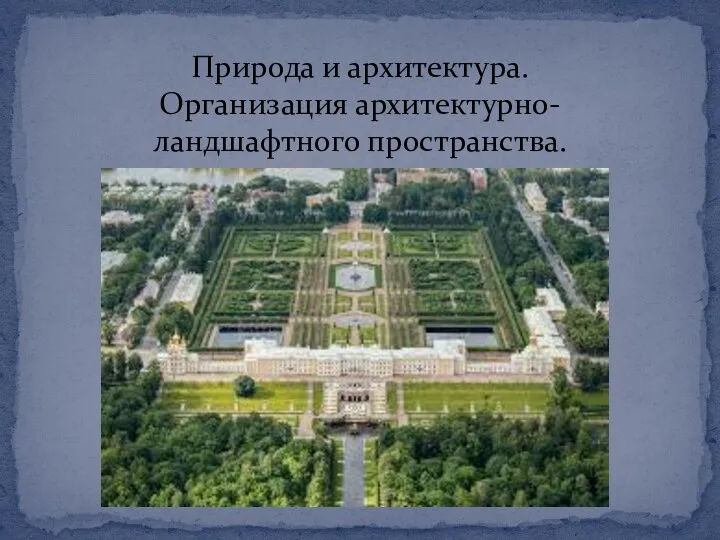 Природа и архитектура. Организация архитектурно-ландшафтного пространства
Природа и архитектура. Организация архитектурно-ландшафтного пространства Технологический процесс изготовления кровати на примере ООО Первая мебельная фабрика
Технологический процесс изготовления кровати на примере ООО Первая мебельная фабрика