- Электропривод и автоматизация оборудования лесного комплекса

Содержание
- 2. ЗАДАНИЕ № 1 Исходные данные задания: - тип производственной установки – поточно-транспортная система (ПТС); - подвид
- 3. Пример расчёта параметров и построение механической характеристики двигателя 5А200L4 МКР = mКР × MH = 2,8
- 4. 1.2 Построение механической характеристики выбранного ЭП (электродвигателя) Механическая характеристика двигателя – это зависимость частоты вращения ротора
- 5. Расчёт параметров и построение механической характеристики двигателя n n2 MН n1 MКР M, Н×м MП sКР
- 6. 1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным электроприводом с короткозамкнутым ротором (АД
- 7. Точки подачи груза Точка доставки груза Точка доставки груза ПУ № 1 СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
- 9. Скачать презентацию

ЗАДАНИЕ № 1
Исходные данные задания:
- тип производственной установки – поточно-транспортная система
ЗАДАНИЕ № 1
Исходные данные задания:
- тип производственной установки – поточно-транспортная система

Пример расчёта параметров и построение механической характеристики двигателя 5А200L4
МКР = mКР
Пример расчёта параметров и построение механической характеристики двигателя 5А200L4
МКР = mКР
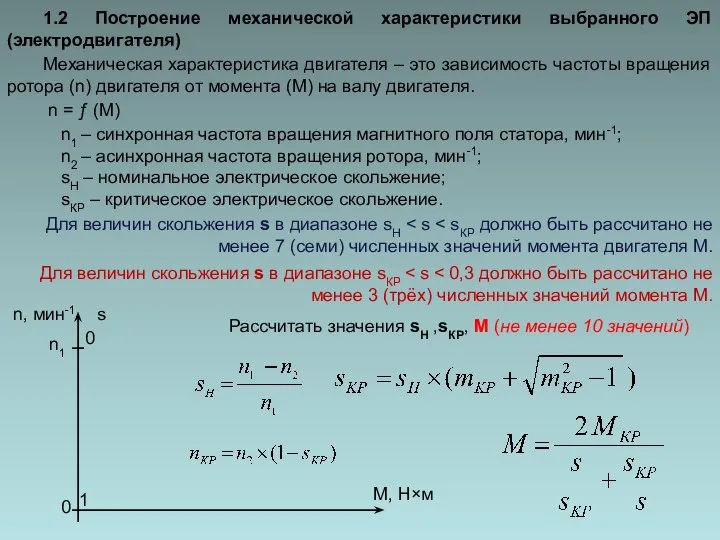
1.2 Построение механической характеристики выбранного ЭП (электродвигателя)
Механическая характеристика двигателя – это
1.2 Построение механической характеристики выбранного ЭП (электродвигателя)
Механическая характеристика двигателя – это

Расчёт параметров и построение механической характеристики двигателя
n
n2
MН
n1
MКР
M, Н×м
MП
sКР
sH
s
Для рабочего (двигательного) участка
Расчёт параметров и построение механической характеристики двигателя
n
n2
MН
n1
MКР
M, Н×м
MП
sКР
sH
s
Для рабочего (двигательного) участка
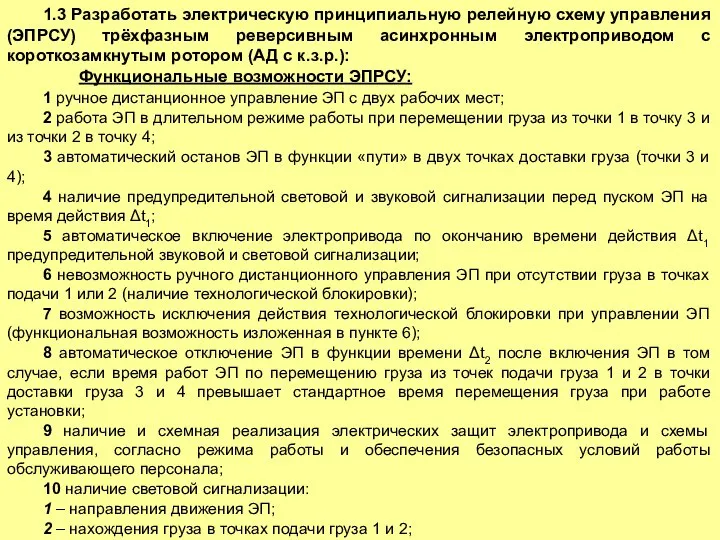
1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным
1.3 Разработать электрическую принципиальную релейную схему управления (ЭПРСУ) трёхфазным реверсивным асинхронным

Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
ПУ № 1
СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА
ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
3
4
1
2
ПУ № 2
Точки подачи груза
Точка
доставки
груза
Точка
доставки
груза
ПУ № 1
СТРУКТУРНО-КОНСТРУКТИВНАЯ СХЕМА
ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ
3
4
1
2
ПУ № 2
 Электричество в быту
Электричество в быту Смесительные и детекторные диоды
Смесительные и детекторные диоды Презентация Интеграционные процессы в рамках СНГ. Таможенный союз Белоруссии, России и Казахстана. Формирование Единого экономич
Презентация Интеграционные процессы в рамках СНГ. Таможенный союз Белоруссии, России и Казахстана. Формирование Единого экономич Идентификация минеральных вод с использованием импедансометрического «электронного языка»
Идентификация минеральных вод с использованием импедансометрического «электронного языка» Телемаркетинг Внедрение активных продаж и...
Телемаркетинг Внедрение активных продаж и...  Организация системы внеурочной, внешкольной деятельности по продвижению физической культуры и спорта
Организация системы внеурочной, внешкольной деятельности по продвижению физической культуры и спорта Le park Sofiivka a Ouman
Le park Sofiivka a Ouman Фестиваль исследовательских и творческих работ учащихся «Портфолио» «Дед Мороз шагает по планете» Выполнили: ученик
Фестиваль исследовательских и творческих работ учащихся «Портфолио» «Дед Мороз шагает по планете» Выполнили: ученик Презентация Документы по платежно-банковским операциям
Презентация Документы по платежно-банковским операциям Презентация "Культура античности.Эгейское искусство" - скачать презентации по МХК
Презентация "Культура античности.Эгейское искусство" - скачать презентации по МХК Интеллектуальные информационные системы. Искусственный интеллект
Интеллектуальные информационные системы. Искусственный интеллект Державна служба України (регіональний аспект)
Державна служба України (регіональний аспект) Тема 10. Коммуникации в системе управления фирмой
Тема 10. Коммуникации в системе управления фирмой  Биография Мартина Лютера
Биография Мартина Лютера Адаптация первоклассников
Адаптация первоклассников Место и роль закона в системе общего права
Место и роль закона в системе общего права Palabras en español
Palabras en español Справедливость как философская проблема Горбатов В.В. НИУ ВШЭ, 2012
Справедливость как философская проблема Горбатов В.В. НИУ ВШЭ, 2012 Вегетативная нервная система: Симпатическая и Парасимпатическая нервная система
Вегетативная нервная система: Симпатическая и Парасимпатическая нервная система Машины переменного тока. Синхронные машины (СМ). Параллельная работа СГ с сетью бесконечно большой мощности
Машины переменного тока. Синхронные машины (СМ). Параллельная работа СГ с сетью бесконечно большой мощности Презентация "Соответствие проектов команд критерию судейства SIFE" - скачать презентации по Экономике
Презентация "Соответствие проектов команд критерию судейства SIFE" - скачать презентации по Экономике Массивы в Паскале. Одномерные массивы. (9 класс)
Массивы в Паскале. Одномерные массивы. (9 класс) V- X Олимпийские игры
V- X Олимпийские игры Классифиция и виды обоев
Классифиция и виды обоев Спортивная семья
Спортивная семья Жұдырықшалы механизмдер
Жұдырықшалы механизмдер Аппаратная поддержка порядка операций обращения в память в системе на кристалле «Эльбрус-2S»
Аппаратная поддержка порядка операций обращения в память в системе на кристалле «Эльбрус-2S» Індивідуальне завдання
Індивідуальне завдання