- Поиск оптимального пути в 3D

Содержание
- 2. Введение Поиск пути (англ. Pathfinding) — термин в информатике и искусственном интеллекте, который означает определение компьютерной
- 3. На данный момент реализованы следующие функции: Поиск кратчайшего пути в одно-, дву-, трехмерных пространствах. Искусственный интеллект
- 4. Для поиска в пространствах с различной размерностью я разработал различные варианты их представления при помощи графов.
- 5. Пространство и способы и его представления: Модель двумерного пространства представляет собой систему вершин, имеющих по шесть
- 6. Модель трёхмерного представляет собой совокупность элементов имеющих по десять связей(см. рис 1.3). Т.е. к каждой вершине
- 7. Чем программа реализующая поиск в трёхмерном пространстве лучше других систем? Возможность решать более широкий спектр задач.
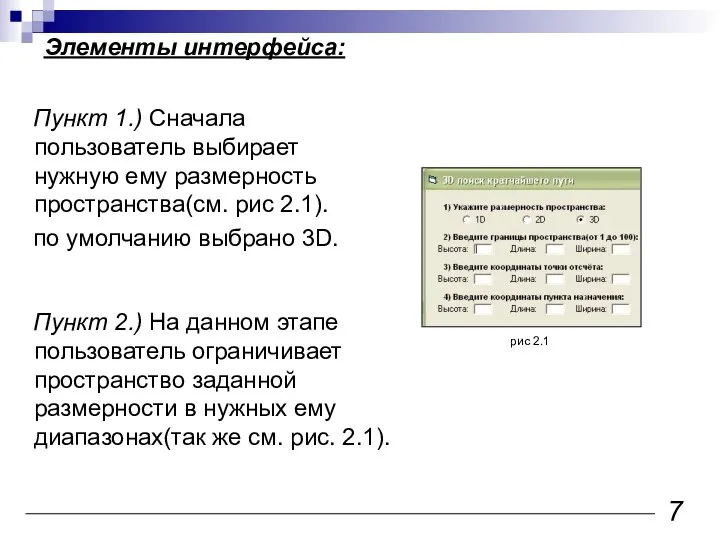
- 8. Пункт 1.) Сначала пользователь выбирает нужную ему размерность пространства(см. рис 2.1). по умолчанию выбрано 3D. рис
- 9. рис 2.2 рис 2.3 8 Пункты 3-4)Пользователь определяет в пространстве точки начала и пункта назначения(см. рис
- 10. Далее, по нажатии кнопки “рассчитать” программа определяет оптимальный путь(см. рис 2.4) (если он существует), и выводит
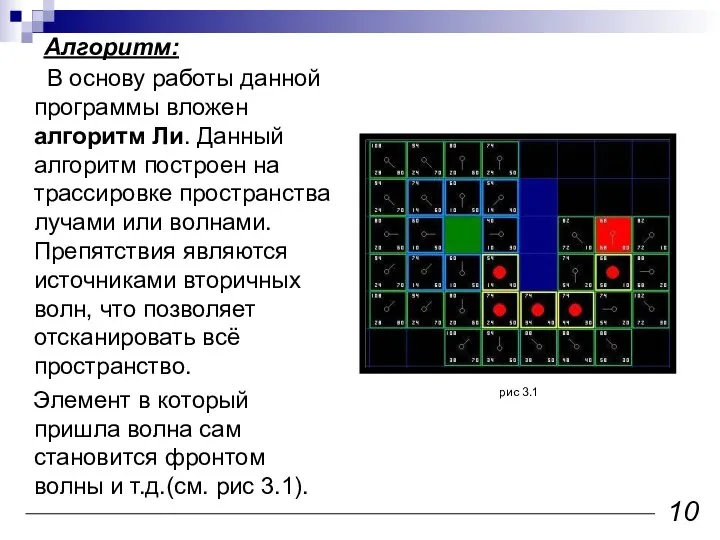
- 11. Алгоритм: В основу работы данной программы вложен алгоритм Ли. Данный алгоритм построен на трассировке пространства лучами
- 12. Если волна прошла все доступные вершины, но так и не достигла пункт назначения, значит, путь от
- 13. К отрицательным чертам данного метода следует отнести его низкую производительность и большой объем памяти требуемый для
- 14. рис 4.1 Сфера применения: 13 Сфера применения алгоритмов трассировки обширна, одна из них – автоматизированная трассировка
- 15. Сфера применения: Другая сфера применения – нахождение кратчайшего пути на оцифрованных картах местности(см. рис. 4.2-4.4.5). рис
- 16. Как видим у алгоритмов достаточно широкое применение и роль которую они начинают играть на рынке увеличивается
- 17. В программе планируются следующие дополнения: Исправление некоторых неполадок. Улучшение графического интерфейса. Введение наглядной системы трёхмерного рендеринга.
- 18. Системные требования: Процессор: 233 MHz Оперативная память: 64 Мб RAM Видеоадаптер и монитор: VGA (640 x
- 20. Скачать презентацию
Введение
Поиск пути (англ. Pathfinding) — термин в информатике и искусственном интеллекте, который
Введение
Поиск пути (англ. Pathfinding) — термин в информатике и искусственном интеллекте, который
На данный момент реализованы следующие функции:
Поиск кратчайшего пути
в одно-,
На данный момент реализованы следующие функции:
Поиск кратчайшего пути
в одно-,
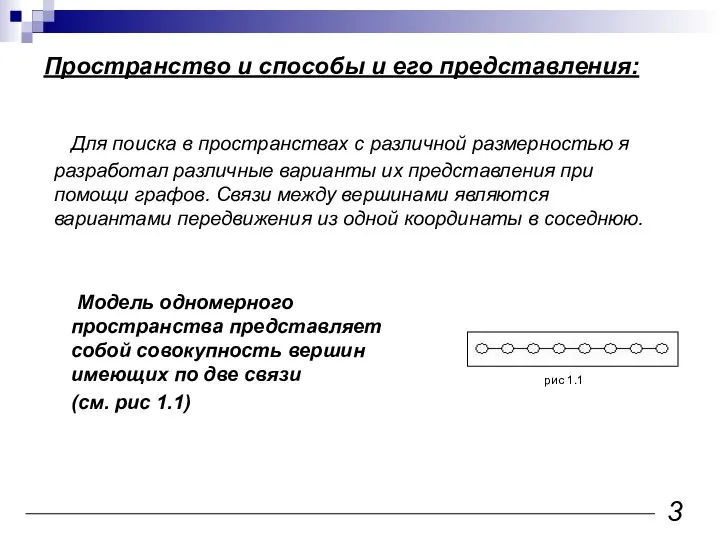
Для поиска в пространствах с различной размерностью я разработал различные варианты
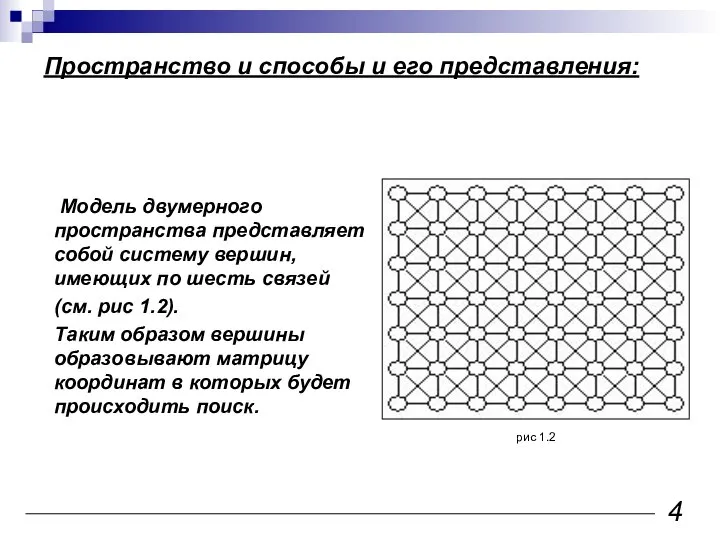
Пространство и способы и его представления:
Модель двумерного пространства представляет собой
Пространство и способы и его представления:
Модель двумерного пространства представляет собой
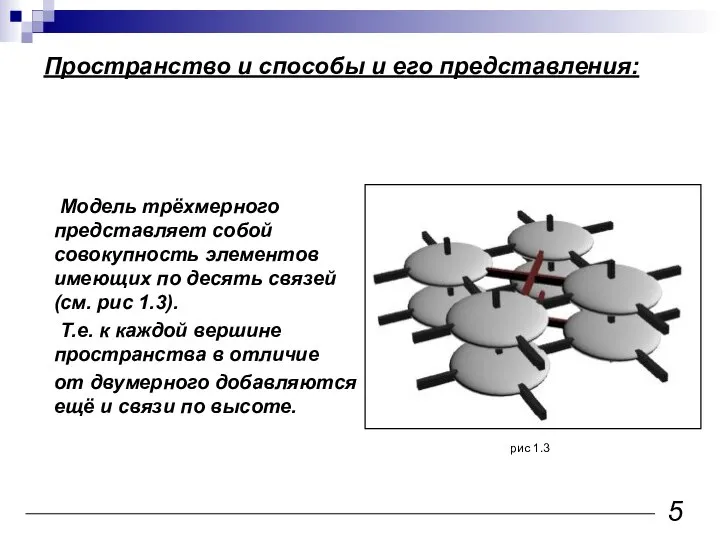
Модель трёхмерного представляет собой совокупность элементов имеющих по десять связей(см.
Модель трёхмерного представляет собой совокупность элементов имеющих по десять связей(см.
Чем программа реализующая поиск в трёхмерном пространстве лучше других систем?
Возможность решать
Чем программа реализующая поиск в трёхмерном пространстве лучше других систем?
Возможность решать
Пункт 1.) Сначала пользователь выбирает нужную ему размерность пространства(см. рис
Пункт 1.) Сначала пользователь выбирает нужную ему размерность пространства(см. рис
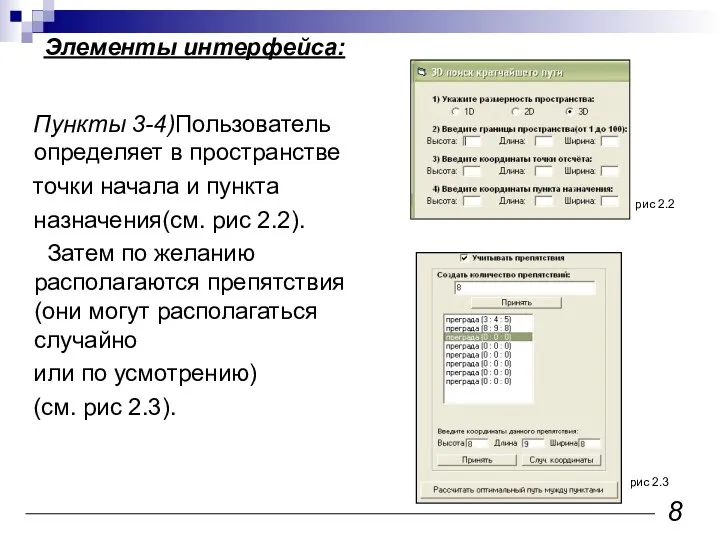
рис 2.2
рис 2.3
8
Пункты 3-4)Пользователь определяет в пространстве
рис 2.2
рис 2.3
8
Пункты 3-4)Пользователь определяет в пространстве
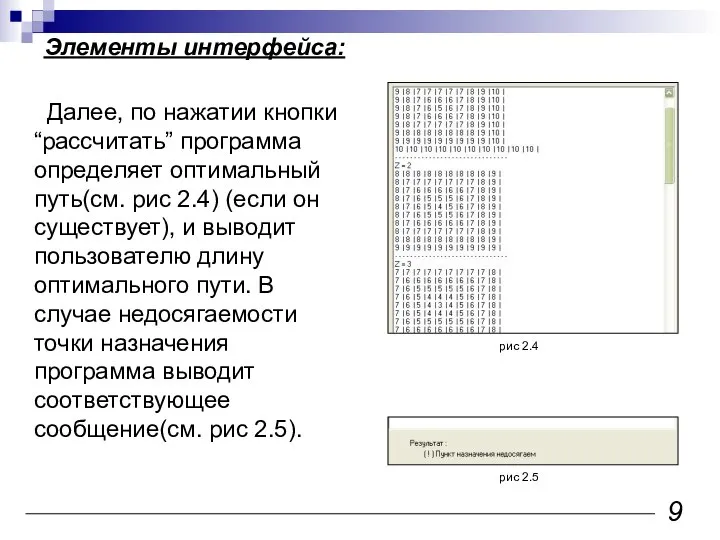
Далее, по нажатии кнопки “рассчитать” программа определяет оптимальный путь(см. рис
Далее, по нажатии кнопки “рассчитать” программа определяет оптимальный путь(см. рис
Алгоритм:
В основу работы данной программы вложен алгоритм Ли. Данный алгоритм
Алгоритм:
В основу работы данной программы вложен алгоритм Ли. Данный алгоритм
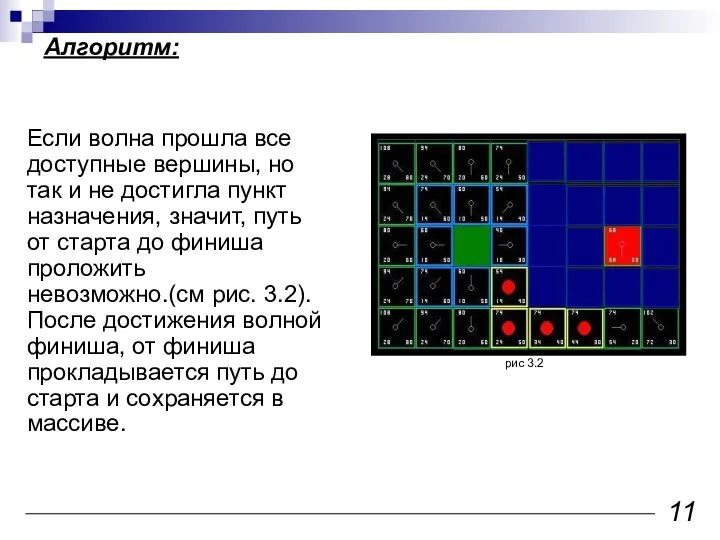
Если волна прошла все доступные вершины, но так и не
Если волна прошла все доступные вершины, но так и не
К отрицательным чертам данного метода следует отнести его низкую производительность и
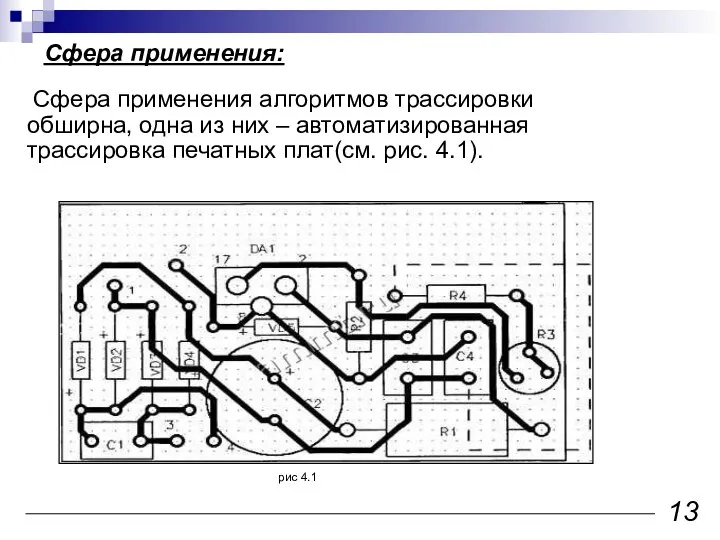
рис 4.1
Сфера применения:
13
Сфера применения алгоритмов трассировки обширна, одна
рис 4.1
Сфера применения:
13
Сфера применения алгоритмов трассировки обширна, одна

Сфера применения:
Другая сфера применения – нахождение кратчайшего пути на оцифрованных
Сфера применения:
Другая сфера применения – нахождение кратчайшего пути на оцифрованных
Как видим у алгоритмов достаточно широкое применение и роль которую
Как видим у алгоритмов достаточно широкое применение и роль которую
В программе планируются следующие дополнения:
Исправление некоторых неполадок.
Улучшение графического интерфейса.
Введение наглядной
В программе планируются следующие дополнения:
Исправление некоторых неполадок.
Улучшение графического интерфейса.
Введение наглядной
Системные требования:
Процессор: 233 MHz
Оперативная память: 64 Мб RAM
Видеоадаптер и монитор: VGA (640 x
Системные требования:
Процессор: 233 MHz
Оперативная память: 64 Мб RAM
Видеоадаптер и монитор: VGA (640 x
 Викторина. Олимпийские знатоки
Викторина. Олимпийские знатоки Осциллографы. Методы и средства измерения параметров электрических цепей
Осциллографы. Методы и средства измерения параметров электрических цепей МОИ ЛЮБИМЫЙ ВИД СПОРТА ЛЫЖНЫЙ
МОИ ЛЮБИМЫЙ ВИД СПОРТА ЛЫЖНЫЙ Декоративно-прикладное искусство. Украинский народный костюм
Декоративно-прикладное искусство. Украинский народный костюм Материально-техническое обеспечение
Материально-техническое обеспечение Запись прошивки на USB флешку
Запись прошивки на USB флешку Графическая работа по системам компьютерной графики
Графическая работа по системам компьютерной графики Из истории развития чертежа
Из истории развития чертежа Изменение спектров
Изменение спектров Национальный проект «Жилье и городская среда»
Национальный проект «Жилье и городская среда» Религии Океании и Австралии
Религии Океании и Австралии Гражданское право
Гражданское право Растровые алгоритмы и характеристики растра
Растровые алгоритмы и характеристики растра Многопартийность в стране
Многопартийность в стране Қылмыстық сот ісін жүргізу саласындағы халықаралық ынтымақтастық
Қылмыстық сот ісін жүргізу саласындағы халықаралық ынтымақтастық Презентация "Начало русского портрета" - скачать презентации по МХК
Презентация "Начало русского портрета" - скачать презентации по МХК Федеральные государственные образовательные стандарты общего образования: цели и содержание
Федеральные государственные образовательные стандарты общего образования: цели и содержание рак толстой кишки
рак толстой кишки Работа аниматором. Дипломная работа
Работа аниматором. Дипломная работа Культура 20 века
Культура 20 века Адресная арифметика. «Структурные» типы данных
Адресная арифметика. «Структурные» типы данных Глобальные проблемы человечества. Международный терроризм
Глобальные проблемы человечества. Международный терроризм ABC АНАЛИЗ ПРИМЕР ПРОГРАММА ДЛЯ ABC АНАЛИЗА
ABC АНАЛИЗ ПРИМЕР ПРОГРАММА ДЛЯ ABC АНАЛИЗА  Строки в C#
Строки в C# Обыкновенное чудо – люди России
Обыкновенное чудо – люди России Презентация Екатерина 2
Презентация Екатерина 2 Действие во время цунами, наводнения.
Действие во время цунами, наводнения. Т6(риски).ppt
Т6(риски).ppt