- Транспортные задачи

Содержание
- 2. Классическая постановка задачи В некотором географическом регионе имеется фиксированное число пунктов производства и хранения некоторого однородного
- 3. Математическая постановка сij – стоимость перевозки от i-го поставщика к j-ому потребителю; хij – объём перевозки
- 4. Математическая модель задачи План , при котором функция F(X) принимает своё минимальное значение, называется оптимальным планом
- 5. Выбор критерия оптимальности Оценка экономической эффективности примерного плана может определятся по тому или иному критерию, положенному
- 6. Показатели оптимальности 1) Объем работы транспорта (критерий - расстояние в т/км). Минимум пробега удобен для оценки
- 7. Показатели оптимальности 2) Тарифная плата за перевозку груза (критерий - тарифы провозных плат). Позволяет получить схему
- 8. Показатели оптимальности 3) Эксплуатационные расходы на транспортировку грузов (критерий - себестоимость эксплуатационных расходов). Более верно отражает
- 9. Показатели оптимальности 4) Сроки доставки грузов (критерий - затраты времени). T – время доставки; lуч –
- 10. Показатели оптимальности 5) Приведенные затраты (с учетом эксплуатационных расходов, зависящих от размеров движения и капиталовложения в
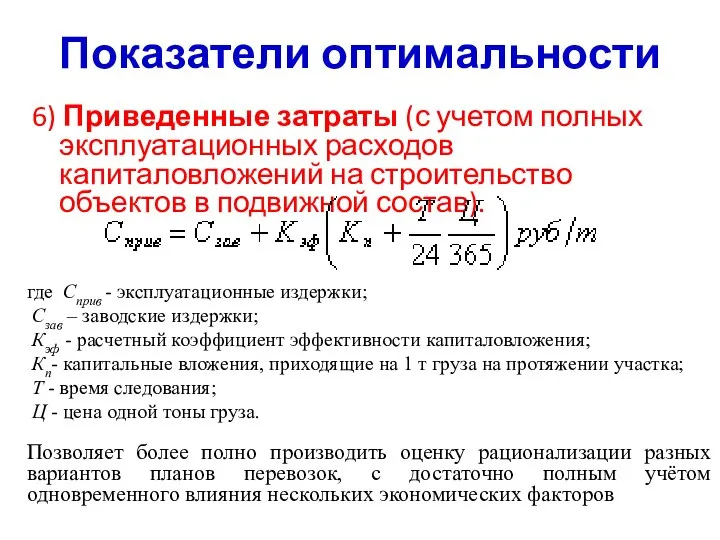
- 11. Показатели оптимальности 6) Приведенные затраты (с учетом полных эксплуатационных расходов капиталовложений на строительство объектов в подвижной
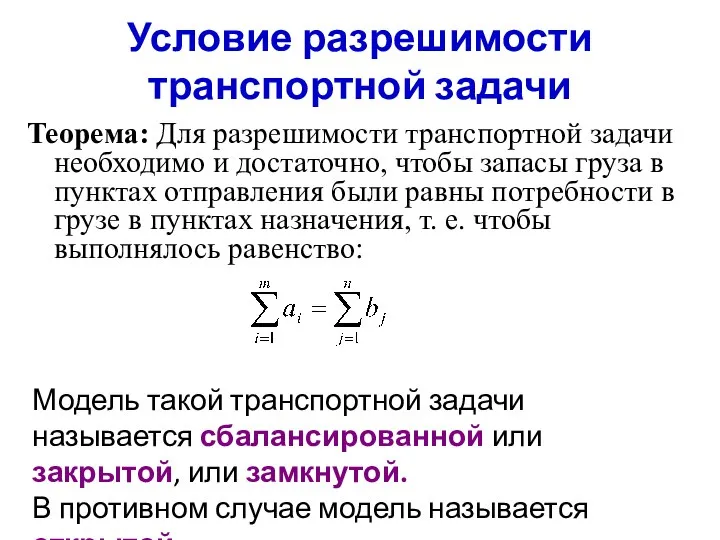
- 12. Условие разрешимости транспортной задачи Теорема: Для разрешимости транспортной задачи необходимо и достаточно, чтобы запасы груза в
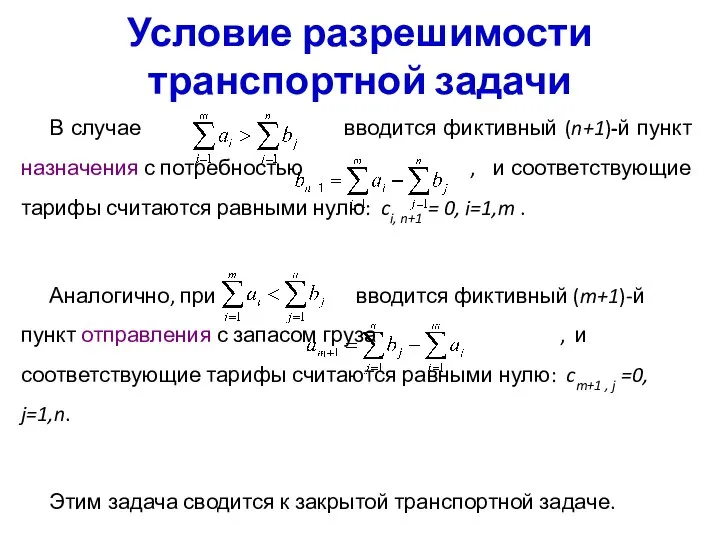
- 13. Условие разрешимости транспортной задачи В случае вводится фиктивный (n+1)-й пункт назначения с потребностью , и соответствующие
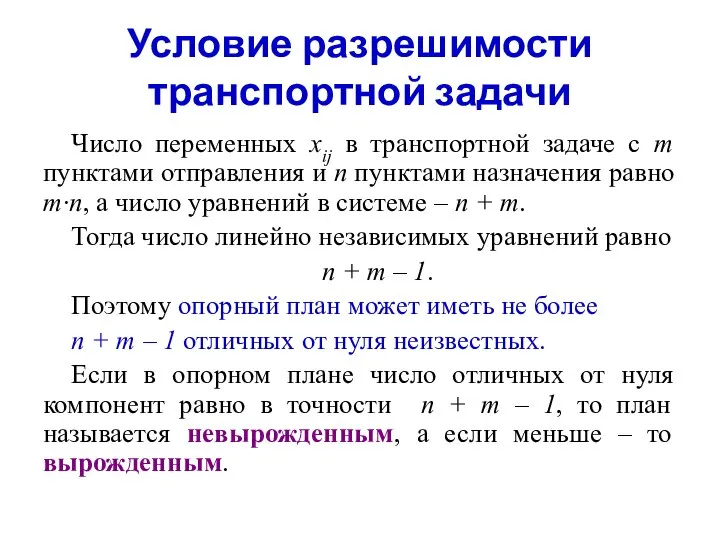
- 14. Условие разрешимости транспортной задачи Число переменных xij в транспортной задаче с m пунктами отправления и n
- 15. Общий алгоритм аналитического решения транспортной задачи методом потенциалов Находим первоначальный допустимый план (методы северо-западного угла, минимального
- 16. Нахождение первоначального допустимого плана 1. Метод северо-западного угла. При нахождении опорного плана на каждом шаге рассматривают
- 17. Нахождение первоначального допустимого плана 2. Метод наименьшей стоимости. Из всей таблицы стоимостей выбирают наименьшую и в
- 18. Нахождение первоначального допустимого плана 3. Метод двойного предпочтения. В каждом столбце отмечают знаком «√» клетку с
- 19. Нахождение первоначального допустимого плана 4. Метод аппроксимации Фогеля. При определении опорного плана данным методом на каждой
- 20. Построенный первоначальный план транспортной задачи как задачи линейного программирования можно было бы довести до оптимального с
- 21. Метод потенциалов – нахождение оптимального плана Составим двойственную задачу u1, u2,…,um, v1, v2,…, vn – двойственные
- 22. Метод потенциалов Теорема (критерий оптимальности) Для того чтобы допустимый план перевозок в транспортной задаче был оптимальным,
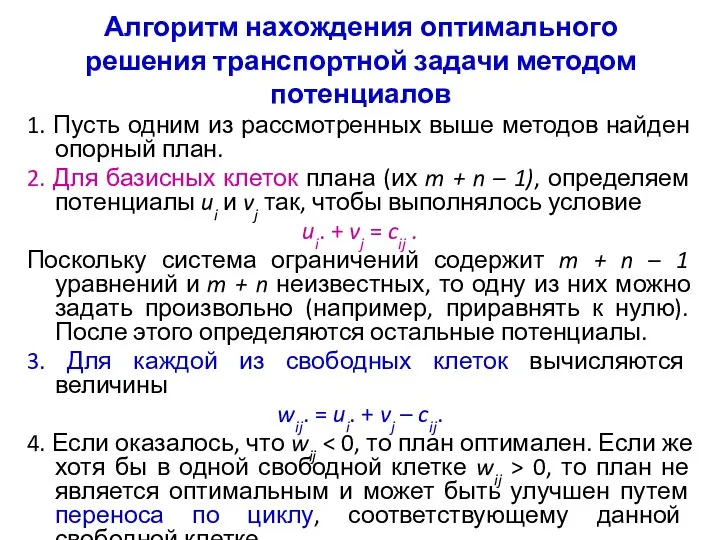
- 23. Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов 1. Пусть одним из рассмотренных выше методов найден
- 24. Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов Циклом в таблице условий транспортной задачи, называется ломаная
- 26. Скачать презентацию

Классическая постановка задачи
В некотором географическом регионе имеется фиксированное число пунктов производства
Классическая постановка задачи
В некотором географическом регионе имеется фиксированное число пунктов производства
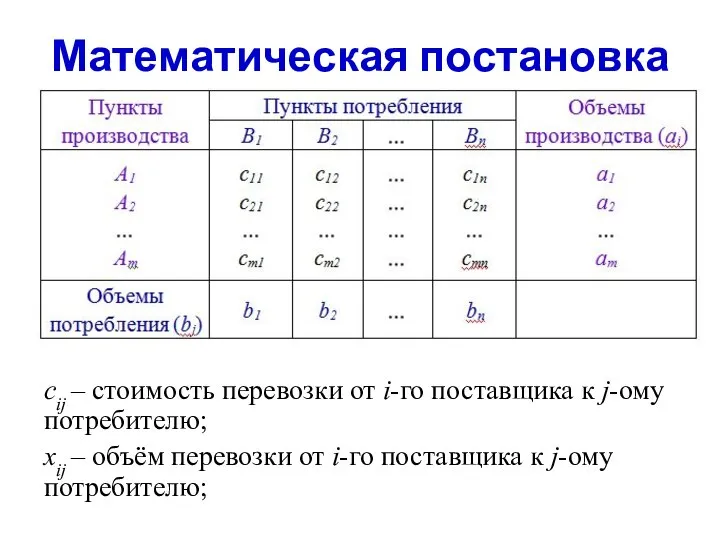
Математическая постановка
сij – стоимость перевозки от i-го поставщика к j-ому потребителю;
хij
Математическая постановка
сij – стоимость перевозки от i-го поставщика к j-ому потребителю;
хij
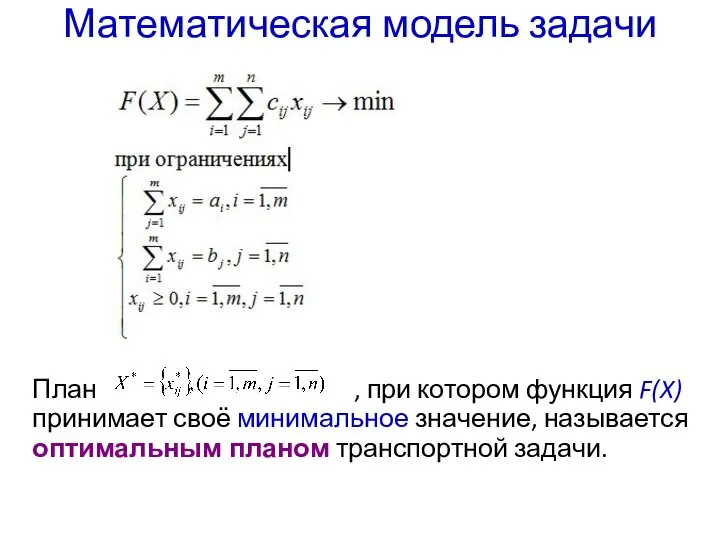
Математическая модель задачи
План , при котором функция F(X) принимает своё минимальное
Математическая модель задачи
План , при котором функция F(X) принимает своё минимальное
Выбор критерия оптимальности
Оценка экономической эффективности примерного плана может определятся по тому или иному
Выбор критерия оптимальности
Оценка экономической эффективности примерного плана может определятся по тому или иному
Показатели оптимальности
1) Объем работы транспорта
(критерий - расстояние в т/км).
Минимум
Показатели оптимальности
1) Объем работы транспорта
(критерий - расстояние в т/км).
Минимум
Показатели оптимальности
2) Тарифная плата за перевозку груза (критерий - тарифы провозных
Показатели оптимальности
2) Тарифная плата за перевозку груза (критерий - тарифы провозных
Показатели оптимальности
3) Эксплуатационные расходы на транспортировку грузов
(критерий - себестоимость эксплуатационных
Показатели оптимальности
3) Эксплуатационные расходы на транспортировку грузов
(критерий - себестоимость эксплуатационных
Показатели оптимальности
4) Сроки доставки грузов
(критерий - затраты времени).
T – время
Показатели оптимальности
4) Сроки доставки грузов
(критерий - затраты времени).
T – время
Показатели оптимальности
5) Приведенные затраты (с учетом эксплуатационных расходов, зависящих от размеров
Показатели оптимальности
5) Приведенные затраты (с учетом эксплуатационных расходов, зависящих от размеров
Показатели оптимальности
6) Приведенные затраты (с учетом полных эксплуатационных расходов капиталовложений на
Показатели оптимальности
6) Приведенные затраты (с учетом полных эксплуатационных расходов капиталовложений на
Условие разрешимости транспортной задачи
Теорема: Для разрешимости транспортной задачи необходимо и достаточно,
Условие разрешимости транспортной задачи
Теорема: Для разрешимости транспортной задачи необходимо и достаточно,
Условие разрешимости транспортной задачи
В случае вводится фиктивный (n+1)-й пункт назначения с
Условие разрешимости транспортной задачи
В случае вводится фиктивный (n+1)-й пункт назначения с
Условие разрешимости транспортной задачи
Число переменных xij в транспортной задаче с m
Условие разрешимости транспортной задачи
Число переменных xij в транспортной задаче с m
Общий алгоритм аналитического решения транспортной задачи
методом потенциалов
Находим первоначальный допустимый план
Общий алгоритм аналитического решения транспортной задачи
методом потенциалов
Находим первоначальный допустимый план
Нахождение первоначального допустимого плана
1. Метод северо-западного угла.
При нахождении опорного плана
Нахождение первоначального допустимого плана
1. Метод северо-западного угла.
При нахождении опорного плана
Нахождение первоначального допустимого плана
2. Метод наименьшей стоимости.
Из всей таблицы стоимостей
Нахождение первоначального допустимого плана
2. Метод наименьшей стоимости.
Из всей таблицы стоимостей
Нахождение первоначального допустимого плана
3. Метод двойного предпочтения.
В каждом столбце отмечают
Нахождение первоначального допустимого плана
3. Метод двойного предпочтения.
В каждом столбце отмечают
Нахождение первоначального допустимого плана
4. Метод аппроксимации Фогеля.
При определении опорного плана
Нахождение первоначального допустимого плана
4. Метод аппроксимации Фогеля.
При определении опорного плана
Построенный первоначальный план транспортной задачи как задачи линейного программирования можно было
Построенный первоначальный план транспортной задачи как задачи линейного программирования можно было
Метод потенциалов – нахождение оптимального плана
Составим двойственную задачу
u1, u2,…,um, v1, v2,…,
Метод потенциалов – нахождение оптимального плана
Составим двойственную задачу
u1, u2,…,um, v1, v2,…,
Метод потенциалов
Теорема (критерий оптимальности)
Для того чтобы допустимый план перевозок в транспортной задаче
Метод потенциалов
Теорема (критерий оптимальности)
Для того чтобы допустимый план перевозок в транспортной задаче
Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов
1. Пусть одним из
Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов
1. Пусть одним из

Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов
Циклом в таблице условий
Алгоритм нахождения оптимального решения транспортной задачи методом потенциалов
Циклом в таблице условий
 Қаратөбе аудандық ішкі саясат бөлімі
Қаратөбе аудандық ішкі саясат бөлімі Разработка проекта благоустройства территории вблизи учебного корпуса № 15
Разработка проекта благоустройства территории вблизи учебного корпуса № 15 У КОГО ЖИВУТ ВЕСНУШКИ ? Работу выполнил: ученик 3-в класса ГОУ РМЭ «Лицей Бауманский» Исаев Никита Руководитель: Старикова Т.А.
У КОГО ЖИВУТ ВЕСНУШКИ ? Работу выполнил: ученик 3-в класса ГОУ РМЭ «Лицей Бауманский» Исаев Никита Руководитель: Старикова Т.А. Конфискация имущества в сфере экономических преступлений. Отечественный и зарубежный опыт
Конфискация имущества в сфере экономических преступлений. Отечественный и зарубежный опыт Презентация на тему "Коронарное кровообращение и его регуляция" - скачать презентации по Медицине
Презентация на тему "Коронарное кровообращение и его регуляция" - скачать презентации по Медицине Аграрный календарь. Обычаи и обряды. Праздничность. Игра Часть 4
Аграрный календарь. Обычаи и обряды. Праздничность. Игра Часть 4 Архитектура Древнего Рима
Архитектура Древнего Рима  Основное представление об игре «баскетбол»
Основное представление об игре «баскетбол» Клуб спортивных единоборств «Невский»
Клуб спортивных единоборств «Невский» Очереди
Очереди RCS Component location
RCS Component location Шейпинг (ритмическая гимнастика)
Шейпинг (ритмическая гимнастика) Монтаж кабельных линий
Монтаж кабельных линий Организация как объект управления
Организация как объект управления National clothes and patterns of China
National clothes and patterns of China Презентация мастер-группы
Презентация мастер-группы НАРУШЕНИЯ УРОВНЯ АКТГ
НАРУШЕНИЯ УРОВНЯ АКТГ Презентация "Один день из жизни лагеря «Радуга» " - скачать презентации по МХК
Презентация "Один день из жизни лагеря «Радуга» " - скачать презентации по МХК Развал Югославии
Развал Югославии Чарльз Дарвин
Чарльз Дарвин Степень заполнения примесных уровней
Степень заполнения примесных уровней Примеры расчета потенциала по известным полям
Примеры расчета потенциала по известным полям Развитие личности и её жизненный путь
Развитие личности и её жизненный путь Joyeux Noël et le Nouvel An en France
Joyeux Noël et le Nouvel An en France Нормативно - правовое и инструктивно - методическое обеспечение преподавания предмета «Математика» в 2014-2015 уч. году
Нормативно - правовое и инструктивно - методическое обеспечение преподавания предмета «Математика» в 2014-2015 уч. году משפחה-שלי
משפחה-שלי Идеология исламского фундаментализма
Идеология исламского фундаментализма Классификация религий
Классификация религий