- Основы биомеханики

Содержание
- 2. Использование современных физических методов в клинической ветеринарии позволяет усовершенствовать диагностику, профилактику и лечение сельскохозяйственных животных и
- 3. БИОМЕХАНИКА это раздел биофизики, изучающий механические свойства живых тканей, органов и организма в целом, а также
- 4. Движения живых существ интересовали человека с давних времен. Аристотель, Клавдий Гален, Леонардо да Винчи, заложили основы
- 5. Биомеханика – смежная наука. на «стыке» двух наук: биологии – науки о жизни; механики – науки
- 6. Виды движения: Поступательное движение – это такое движение твёрдого тела, при котором прямая, соединяющая две любые
- 7. Масса тела (m) – мера инертности тела при поступательном движении. Момент инерции тела (J ) –
- 8. Изменение скорости движения тел происходит под действием сил Сила – это физическая величина, характеризующая взаимодействие тел;
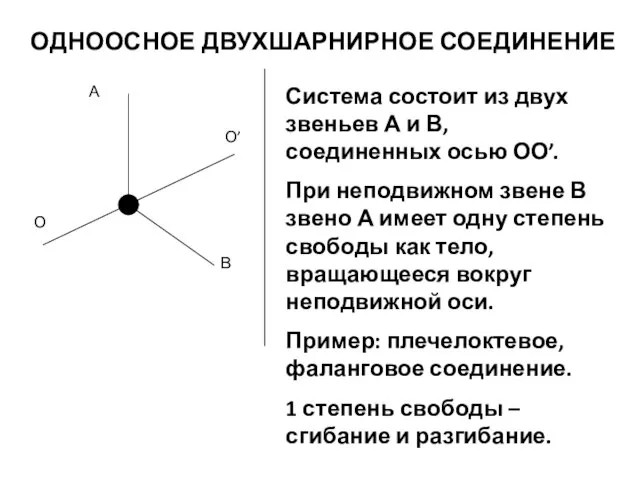
- 9. ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ О’ Система состоит из двух звеньев А и В, соединенных осью ОО’. При
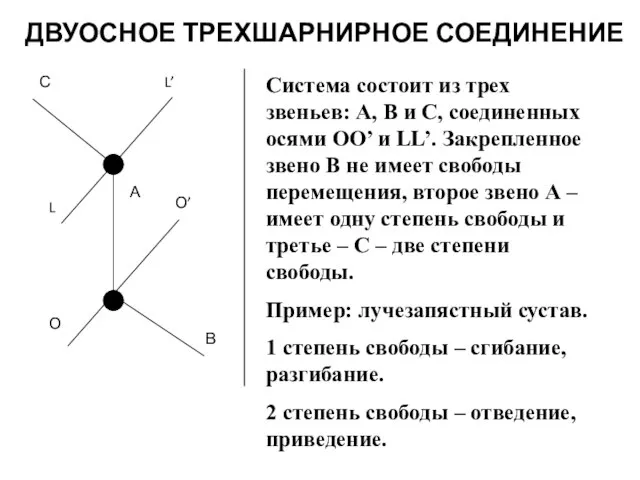
- 10. ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ Система состоит из трех звеньев: А, В и С, соединенных осями ОО’ и
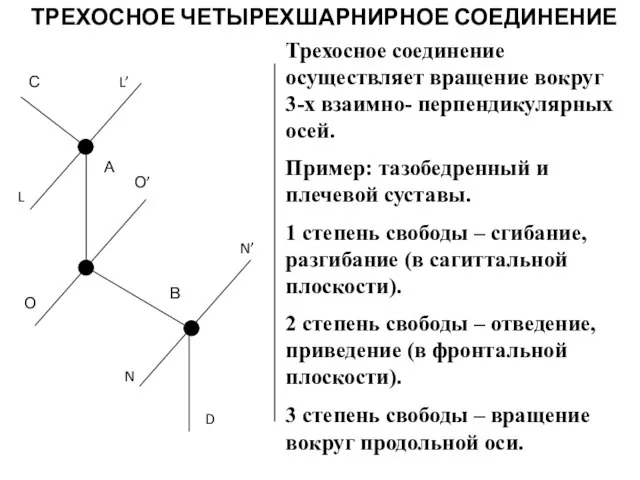
- 11. ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ L N’ Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных осей. Пример: тазобедренный
- 13. Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы, стремящиеся повернуть его вокруг этой
- 14. ВИДЫ РЫЧАГОВ Рычаг I рода Рычаг II рода Рычаг силы Рычаг скорости
- 15. РЫЧАГ ПЕРВОГО РОД Рычаг первого рода- это рычаг, ось вращения которого расположена между точками приложения сил,
- 16. d1 d2 А В Ось вращения плечи сил Рычаг первого рода
- 17. А B Б dB dБ (А) точка опоры (ось вращения) (В) точка сопротивления (сила тяжести) (Б)
- 18. Рычаг второго рода это рычаг, ось вращения которого расположена по одну сторону от точек приложения сил,
- 19. d1-плечо силы F1 В d2- плечо силы F2 Рычаг второго рода Ось вращения А
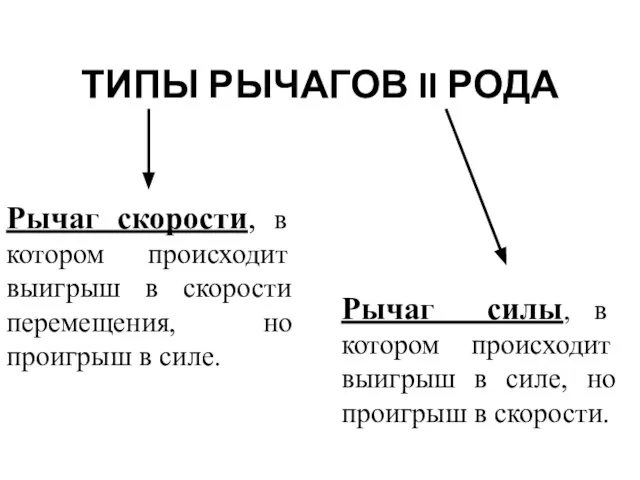
- 20. ТИПЫ РЫЧАГОВ II РОДА Рычаг скорости, в котором происходит выигрыш в скорости перемещения, но проигрыш в
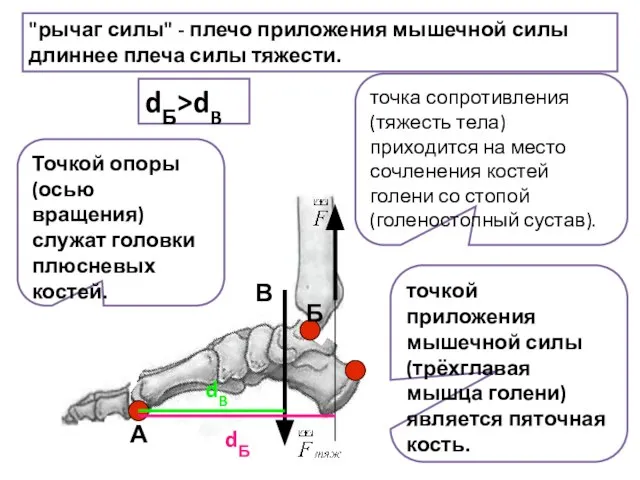
- 21. А В Б dБ dB "рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
- 22. Первый вид рычага второго рода - "рычаг силы" - имеет место в том случае, если плечо
- 24. Скачать презентацию
Использование современных физических методов в клинической ветеринарии позволяет усовершенствовать диагностику, профилактику
Использование современных физических методов в клинической ветеринарии позволяет усовершенствовать диагностику, профилактику
БИОМЕХАНИКА это раздел биофизики, изучающий механические свойства живых тканей, органов и
БИОМЕХАНИКА это раздел биофизики, изучающий механические свойства живых тканей, органов и
Движения живых существ интересовали человека с давних времен.
Аристотель, Клавдий Гален, Леонардо
Движения живых существ интересовали человека с давних времен.
Аристотель, Клавдий Гален, Леонардо
Биомеханика – смежная наука.
на «стыке» двух наук:
биологии – науки о жизни;
механики –
Биомеханика – смежная наука.
на «стыке» двух наук:
биологии – науки о жизни;
механики –
Виды движения:
Поступательное движение – это такое движение твёрдого тела, при котором
Виды движения: Поступательное движение – это такое движение твёрдого тела, при котором
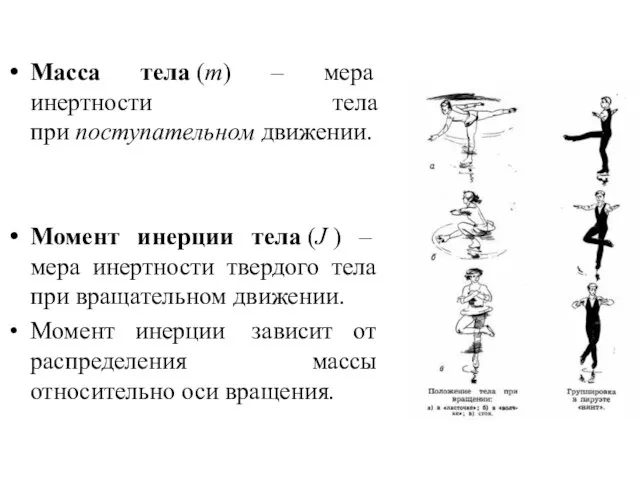
Масса тела (m) – мера инертности тела при поступательном движении.
Момент инерции тела (J ) –
Масса тела (m) – мера инертности тела при поступательном движении.
Момент инерции тела (J ) –
Изменение скорости движения тел происходит под действием сил
Сила – это физическая величина,
Изменение скорости движения тел происходит под действием сил
Сила – это физическая величина,
ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ
О’
Система состоит из двух звеньев А и В,
ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ
О’
Система состоит из двух звеньев А и В,
ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
Система состоит из трех звеньев: А, В и
ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
Система состоит из трех звеньев: А, В и
ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
L
N’
Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных
ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
L
N’
Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных

Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы,
Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы,
ВИДЫ РЫЧАГОВ
Рычаг I рода
Рычаг II рода
Рычаг силы
Рычаг скорости
ВИДЫ РЫЧАГОВ
Рычаг I рода
Рычаг II рода
Рычаг силы
Рычаг скорости
РЫЧАГ ПЕРВОГО РОД
Рычаг первого рода- это рычаг, ось вращения которого
РЫЧАГ ПЕРВОГО РОД
Рычаг первого рода- это рычаг, ось вращения которого
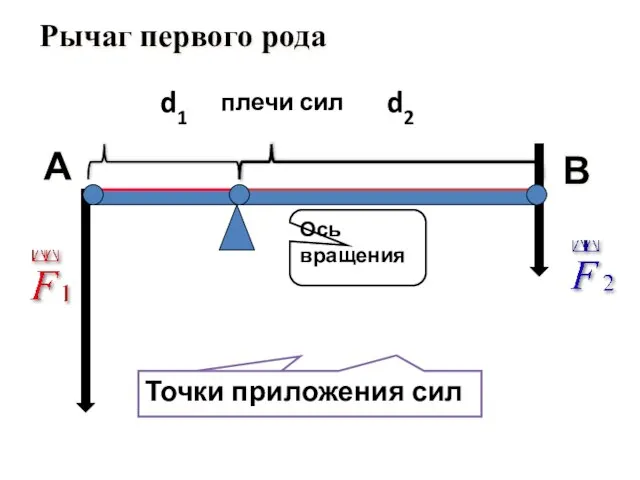
d1
d2
А
В
Ось вращения
плечи сил
Рычаг первого рода
d1
d2
А
В
Ось вращения
плечи сил
Рычаг первого рода
А
B
Б
dB
dБ
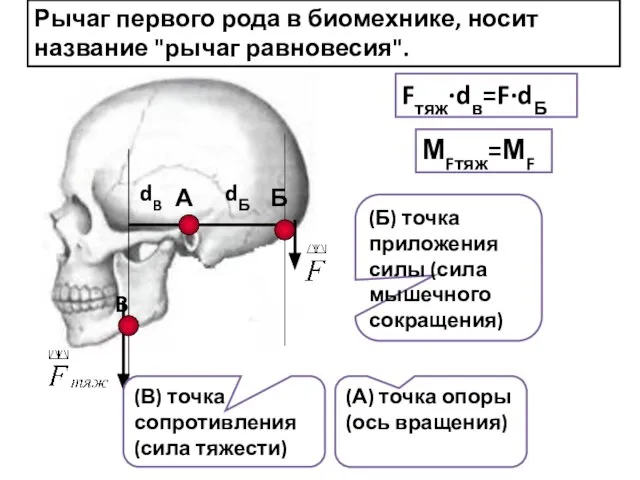
(А) точка опоры
(ось вращения)
(В) точка сопротивления (сила тяжести)
(Б) точка приложения силы
А
B
Б
dB
dБ
(А) точка опоры
(ось вращения)
(В) точка сопротивления (сила тяжести)
(Б) точка приложения силы
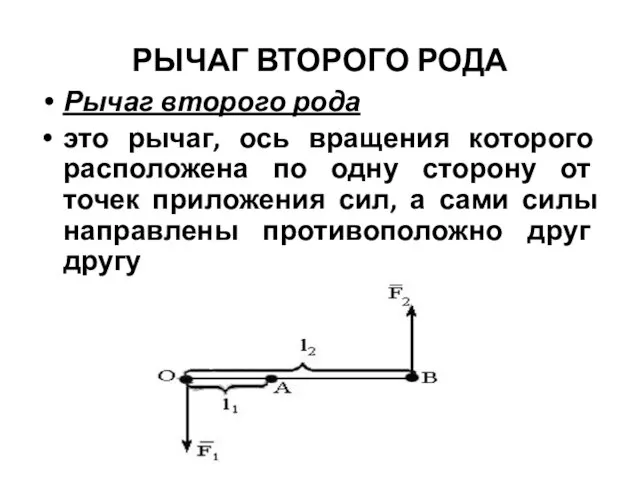
Рычаг второго рода
это рычаг, ось вращения которого расположена по одну сторону
Рычаг второго рода
это рычаг, ось вращения которого расположена по одну сторону
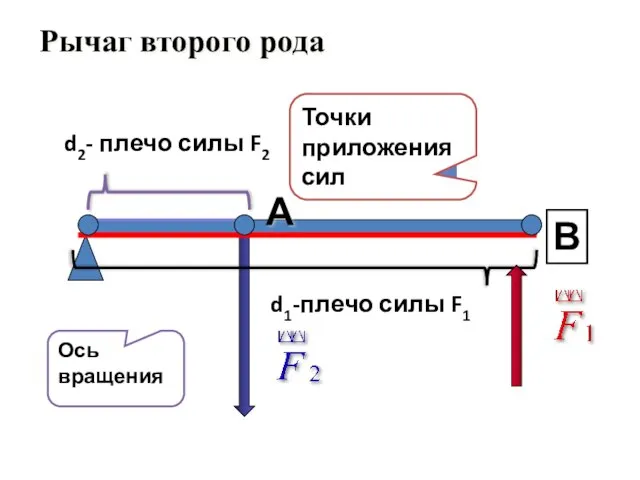
d1-плечо силы F1
В
d2- плечо силы F2
Рычаг второго рода
Ось вращения
А
d1-плечо силы F1
В
d2- плечо силы F2
Рычаг второго рода
Ось вращения
А
ТИПЫ РЫЧАГОВ II РОДА
Рычаг скорости, в котором происходит выигрыш в скорости
ТИПЫ РЫЧАГОВ II РОДА
Рычаг скорости, в котором происходит выигрыш в скорости
А
В
Б
dБ
dB
"рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
Точкой
А
В
Б
dБ
dB
"рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
Точкой
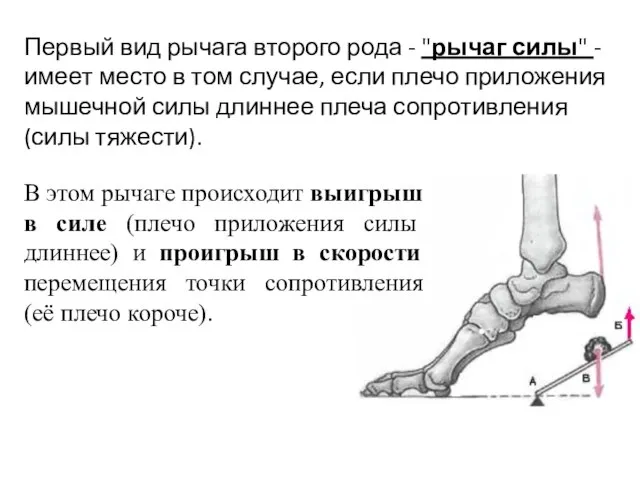
Первый вид рычага второго рода - "рычаг силы" - имеет место
Первый вид рычага второго рода - "рычаг силы" - имеет место
 Условия содержания животных в неволе
Условия содержания животных в неволе Презентация на тему "Вітаміни" - скачать бесплатно презентации по Биологии
Презентация на тему "Вітаміни" - скачать бесплатно презентации по Биологии Подцарство Простейшие
Подцарство Простейшие Кладовая здоровья Подготовили Игнатьева Г.Н., Чернушина Н. Ю., учителя начальных классов МОУ СОШ с УИОП № 47 города
Кладовая здоровья Подготовили Игнатьева Г.Н., Чернушина Н. Ю., учителя начальных классов МОУ СОШ с УИОП № 47 города  Государственное бюджетное образовательное учреждение средняя общеобразовательная школа № 589 Санкт - Петербурга Урок по теме:
Государственное бюджетное образовательное учреждение средняя общеобразовательная школа № 589 Санкт - Петербурга Урок по теме:  Презентация на тему "Цветок" - скачать бесплатно презентации по Биологии__
Презентация на тему "Цветок" - скачать бесплатно презентации по Биологии__ Основы учения об эволюции. Эволюционная теория Ч. Дарвина
Основы учения об эволюции. Эволюционная теория Ч. Дарвина Презентация на тему "Вода-основа жизни" - скачать презентации по Биологии
Презентация на тему "Вода-основа жизни" - скачать презентации по Биологии Ферментативные свойства микроорганизмов
Ферментативные свойства микроорганизмов Кровь и её общая характеристика. Группы крови и резус-фактор. Интересные факты о крови
Кровь и её общая характеристика. Группы крови и резус-фактор. Интересные факты о крови Правила ухода за комнатными растениями
Правила ухода за комнатными растениями Обитатели тайги
Обитатели тайги Времена года
Времена года Половое размножение
Половое размножение Немембранные и двумембранные органоиды
Немембранные и двумембранные органоиды Окружающий мир 2 класс. Строение тела человека
Окружающий мир 2 класс. Строение тела человека …Е121…Е123..Е216…Е217…Е240… Пищевые добавки- полезные, вкусные и запрещённые Московских Анастасия 9 А класс МОУ СОШ № 27 города Бело
…Е121…Е123..Е216…Е217…Е240… Пищевые добавки- полезные, вкусные и запрещённые Московских Анастасия 9 А класс МОУ СОШ № 27 города Бело Кислотно-основное состояние
Кислотно-основное состояние МЫШЦЫ. РАБОТА МЫШЦ. Подготовила учитель биологии и химии – Протопопова Оксана Евгеньевна
МЫШЦЫ. РАБОТА МЫШЦ. Подготовила учитель биологии и химии – Протопопова Оксана Евгеньевна Сходство и различия клеток растений грибов и животных
Сходство и различия клеток растений грибов и животных Одноклеточные паразиты
Одноклеточные паразиты УРОК-ПРЕЗЕНТАЦИЯ по биологии «ФАКТОРЫ СРЕДЫ И ИХ ВЛИЯНИЕ НА БИОЦЕНОЗЫ»
УРОК-ПРЕЗЕНТАЦИЯ по биологии «ФАКТОРЫ СРЕДЫ И ИХ ВЛИЯНИЕ НА БИОЦЕНОЗЫ» Презентация урока «Работа сердца»
Презентация урока «Работа сердца» Медузи. Ознайомитися з будовою і різноманітністю медуз
Медузи. Ознайомитися з будовою і різноманітністю медуз Биоразнообразие. Biodiversity
Биоразнообразие. Biodiversity Статистические закономерности модификационной изменчивости Урок биологии В 10 классе Учитель : Мииккулайнен М.Н.
Статистические закономерности модификационной изменчивости Урок биологии В 10 классе Учитель : Мииккулайнен М.Н. Основные направления эволюции
Основные направления эволюции Томаты
Томаты