- Динамика. Динамика точки и механической системы

Содержание
- 2. Динамика точки
- 3. Динамика – это раздел ТМ, в котором изучаются законы движения материальных тел под действием сил. Сила
- 4. Инертность представляет собой свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных
- 5. Законы механики Галилея–Ньютона. 1. Закон инерции. Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения, пока
- 6. 2. Основной закон динамики. Ускорение материальной точки пропорционально приложенной силе и имеет одинаковое с ней направление.
- 7. 3. Закон равенства действия и противодействия. Силы взаимодействия двух материальных точек равны по величине и противоположны
- 8. 4. Закон независимости сил (Закон суперпозиции). Несколько одновременно действующих на точку сил сообщают точке такое ускорение,
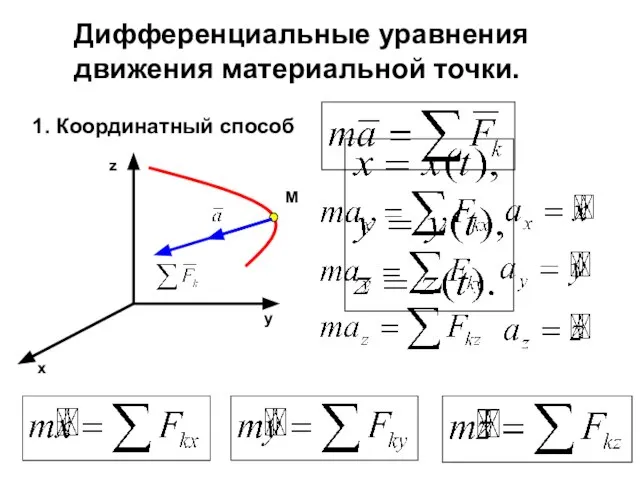
- 9. Дифференциальные уравнения движения материальной точки. 1. Координатный способ M x y z
- 10. 2. Векторный способ M x y z
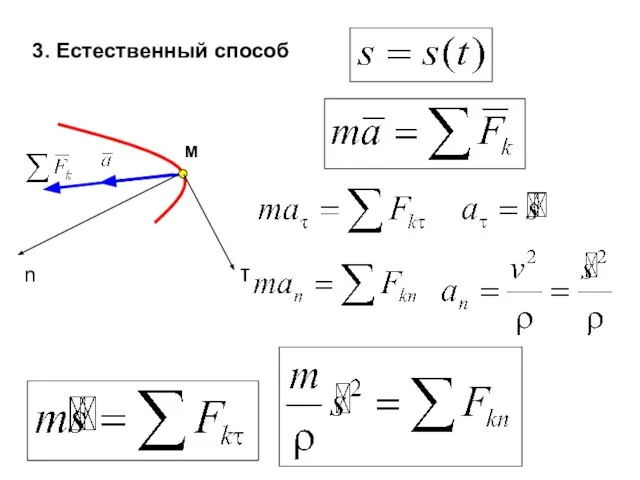
- 11. M τ n 3. Естественный способ
- 12. Задачи динамики точки. Первая задача динамики точки (прямая задача): по заданному закону движения определить силы, действующие
- 13. Вторая задача динамики точки (обратная задача): по заданным силам, действующим на точку, определить закон ее движения.
- 14. Динамика механической системы
- 15. 1. Введение в динамику механической системы Механическая система – совокупность абсолютно твердых тел или абсолютно твердых
- 16. Внешние силы действуют на систему со стороны других тел, не входящих в эту систему. Внутренние силы
- 17. Свойства внутренних сил в неизменяемой механической системе: 1) Главный вектор внутренних сил в системе равен нулю.
- 18. 3) Сумма работ внутренних сил равна нулю на любом возможном перемещении. Неизменяемая механическая система – это
- 19. 2. Масса системы. Центр масс. Масса системы равна арифметической сумме масс всех точек или тел, образующих
- 20. 3. Момент инерции тела относительно оси. Радиус инерции. Моментом инерции тела (системы) относительно данной оси Oz
- 21. 4. Дифференциальные уравнения движения механической системы Полностью описывает движение механической системы. Следовательно, для всей системы будет:
- 22. При исследовании движения механических систем применяют общие теоремы динамики, устанавливающие связь между мерами движения и мерами
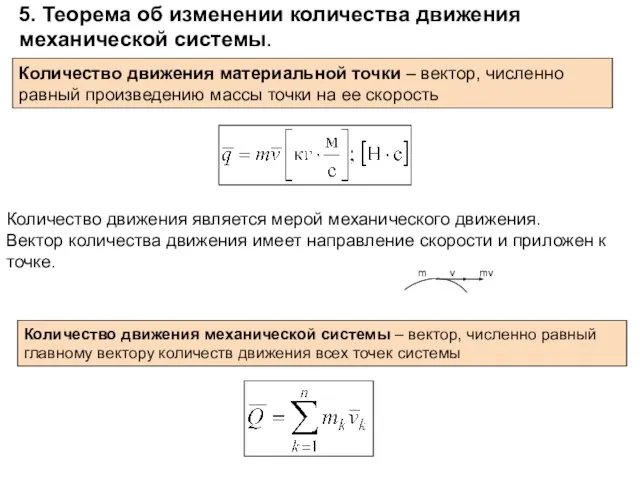
- 23. 5. Теорема об изменении количества движения механической системы. Количество движения материальной точки – вектор, численно равный
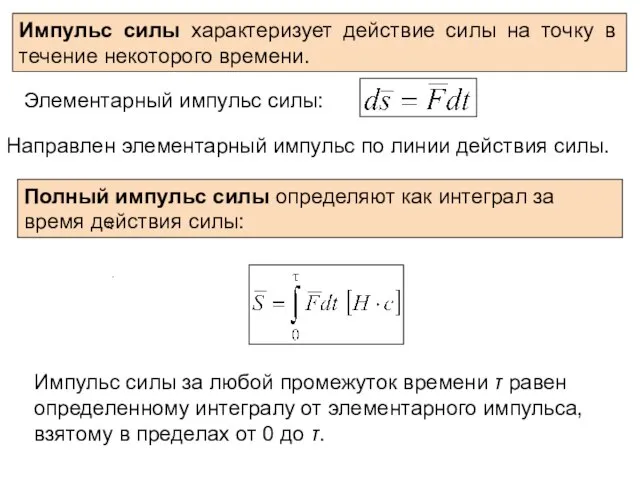
- 24. Импульс силы характеризует действие силы на точку в течение некоторого времени. Элементарный импульс силы: Направлен элементарный
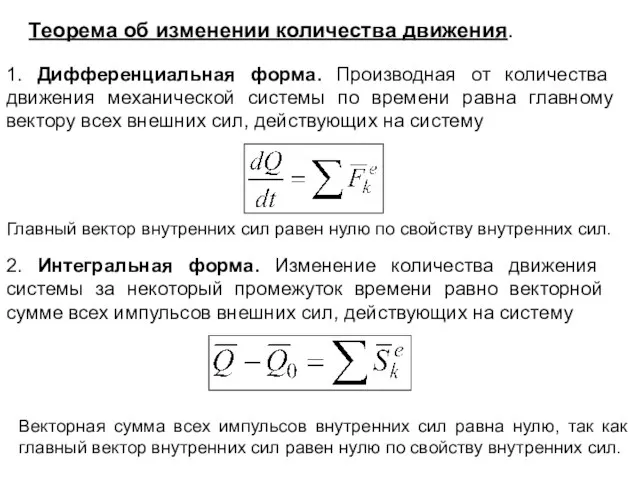
- 25. Теорема об изменении количества движения. 1. Дифференциальная форма. Производная от количества движения механической системы по времени
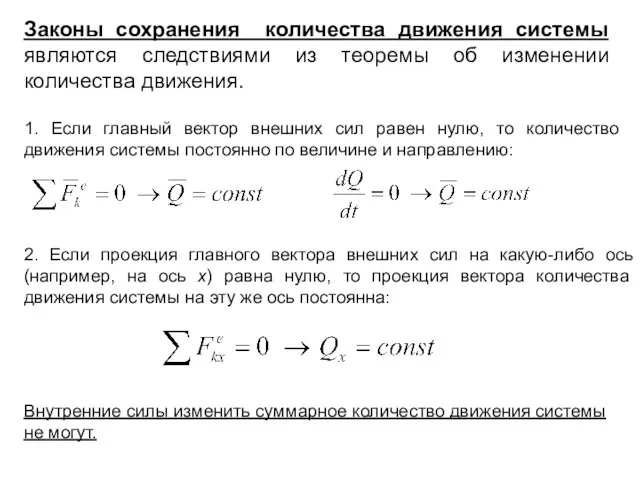
- 26. Законы сохранения количества движения системы являются следствиями из теоремы об изменении количества движения. 1. Если главный
- 27. Количество движения системы можно рассматривать как характеристику поступательного движения системы, а при сложном движении – как
- 28. 6. Дифференциальные уравнения поступательного движения. Если механическая система представляет собой твердое тело, то при поступательном движении
- 29. 7. Теорема об изменении момента количества движения механической системы. Моментом количества движения материальной точки массой m,
- 30. Кинетический момент системы, состоящей из n точек, относительно оси z равен геометрической сумме векторов моментов количества
- 31. Теорема об изменении кинетического момента. Производная по времени от кинетического момента механической системы относительно некоторого центра
- 32. Законы сохранения кинетического момента системы являются следствиями из теоремы об изменении кинетического момента: 1. Если главный
- 33. 8. Дифференциальное уравнение вращательного движения. Дифференциальное уравнение вращательного движения выводят из теоремы об изменении кинетического момента:
- 34. Кинетическая энергия материальной точки – скалярная положительная величина, равная половине произведения массы точки на квадрат ее
- 35. Кинетическая энергия твердого тела: 1) Поступательное движение – 2) Вращательное движение – 3) Плоское движение –
- 36. Работа силы. Работа характеризует действие силы на некотором перемещении точки ее положения (материальной точки или точки
- 37. Работа переменной силы, зависящей от перемещения – Работа силы тяжести – где H – величина вертикального
- 38. Работа постоянной силы, приложенной к вращающемуся телу Работа пары сил с моментом – Работа пары сил
- 40. Скачать презентацию

Динамика точки
Динамика точки
Динамика – это раздел ТМ, в котором изучаются законы движения материальных
Динамика – это раздел ТМ, в котором изучаются законы движения материальных
Инертность представляет собой свойство материальных тел быстрее или медленнее изменять скорость
Инертность представляет собой свойство материальных тел быстрее или медленнее изменять скорость
Законы механики Галилея–Ньютона.
1. Закон инерции. Материальная точка сохраняет состояние покоя
Законы механики Галилея–Ньютона.
1. Закон инерции. Материальная точка сохраняет состояние покоя
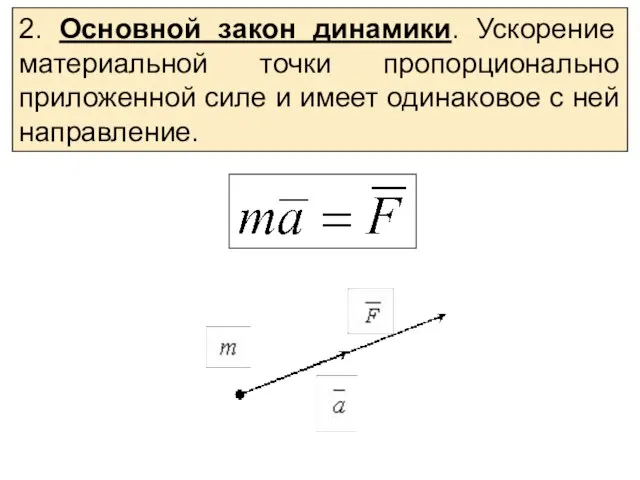
2. Основной закон динамики. Ускорение материальной точки пропорционально приложенной силе и
2. Основной закон динамики. Ускорение материальной точки пропорционально приложенной силе и
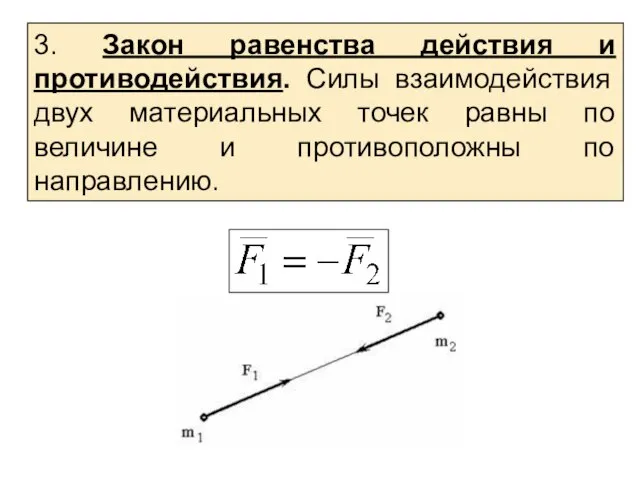
3. Закон равенства действия и противодействия. Силы взаимодействия двух материальных точек
3. Закон равенства действия и противодействия. Силы взаимодействия двух материальных точек
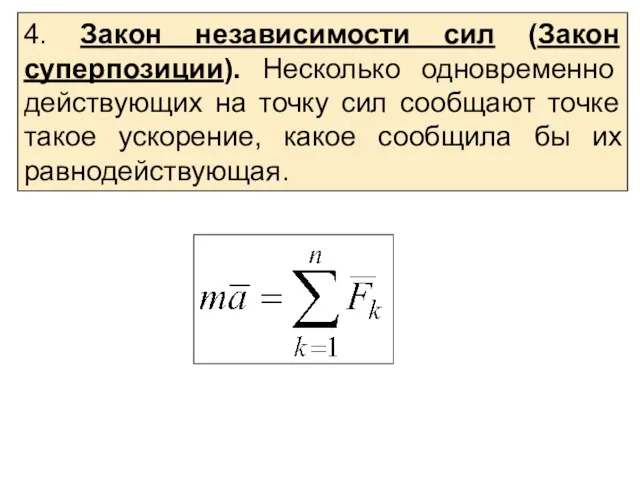
4. Закон независимости сил (Закон суперпозиции). Несколько одновременно действующих на точку
4. Закон независимости сил (Закон суперпозиции). Несколько одновременно действующих на точку
Дифференциальные уравнения
движения материальной точки.
1. Координатный способ
M
x
y
z
Дифференциальные уравнения
движения материальной точки.
1. Координатный способ
M
x
y
z

2. Векторный способ
M
x
y
z
2. Векторный способ
M
x
y
z
M
τ
n
3. Естественный способ
M
τ
n
3. Естественный способ
Задачи динамики точки.
Первая задача динамики точки (прямая задача): по заданному
Задачи динамики точки.
Первая задача динамики точки (прямая задача): по заданному
Вторая задача динамики точки (обратная задача): по заданным силам, действующим на
Вторая задача динамики точки (обратная задача): по заданным силам, действующим на

Динамика
механической системы
Динамика
механической системы
1. Введение в динамику механической системы
Механическая система – совокупность абсолютно твердых
1. Введение в динамику механической системы
Механическая система – совокупность абсолютно твердых
Внешние силы
действуют на систему со стороны других тел, не входящих
Внешние силы
действуют на систему со стороны других тел, не входящих
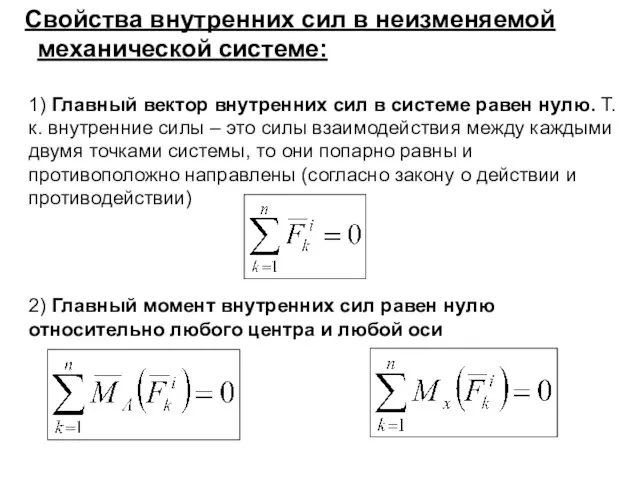
Свойства внутренних сил в неизменяемой механической системе:
1) Главный вектор внутренних сил
Свойства внутренних сил в неизменяемой механической системе:
1) Главный вектор внутренних сил
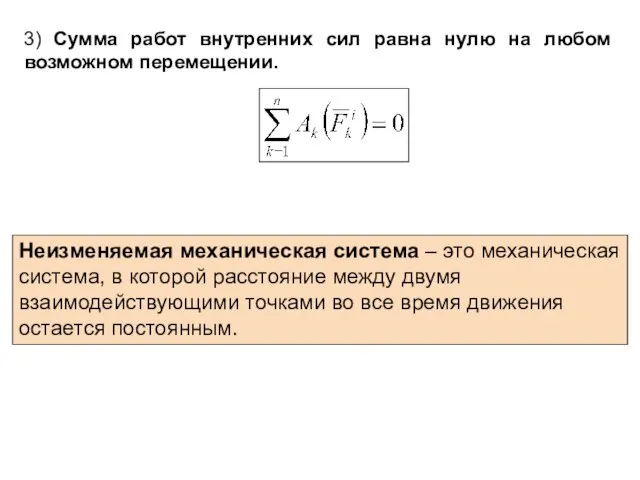
3) Сумма работ внутренних сил равна нулю на любом возможном перемещении.
Неизменяемая
3) Сумма работ внутренних сил равна нулю на любом возможном перемещении.
Неизменяемая
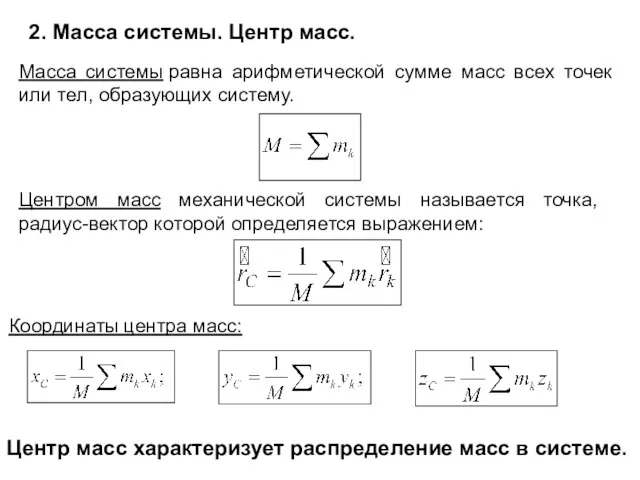
2. Масса системы. Центр масс.
Масса системы равна арифметической сумме масс всех точек
2. Масса системы. Центр масс.
Масса системы равна арифметической сумме масс всех точек

3. Момент инерции тела относительно оси. Радиус инерции.
Моментом инерции тела (системы) относительно
3. Момент инерции тела относительно оси. Радиус инерции.
Моментом инерции тела (системы) относительно
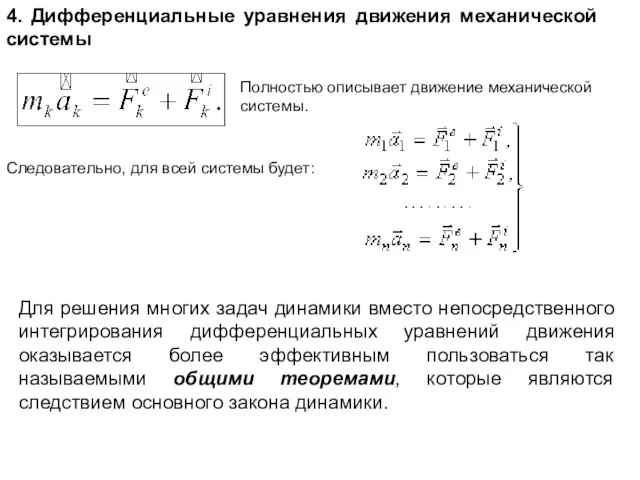
4. Дифференциальные уравнения движения механической системы
Полностью описывает движение механической системы.
Следовательно,
4. Дифференциальные уравнения движения механической системы
Полностью описывает движение механической системы.
Следовательно,

При исследовании движения механических систем применяют общие теоремы динамики, устанавливающие связь
При исследовании движения механических систем применяют общие теоремы динамики, устанавливающие связь
5. Теорема об изменении количества движения
механической системы.
Количество движения материальной точки
5. Теорема об изменении количества движения
механической системы.
Количество движения материальной точки
Импульс силы характеризует действие силы на точку в течение некоторого времени.
Элементарный
Импульс силы характеризует действие силы на точку в течение некоторого времени.
Элементарный
Теорема об изменении количества движения.
1. Дифференциальная форма. Производная от количества движения
Теорема об изменении количества движения.
1. Дифференциальная форма. Производная от количества движения
Законы сохранения количества движения системы являются следствиями из теоремы об изменении
Законы сохранения количества движения системы являются следствиями из теоремы об изменении
Количество движения системы можно рассматривать как характеристику поступательного движения системы, а
Количество движения системы можно рассматривать как характеристику поступательного движения системы, а

6. Дифференциальные уравнения поступательного движения.
Если механическая система представляет собой твердое тело,
6. Дифференциальные уравнения поступательного движения.
Если механическая система представляет собой твердое тело,
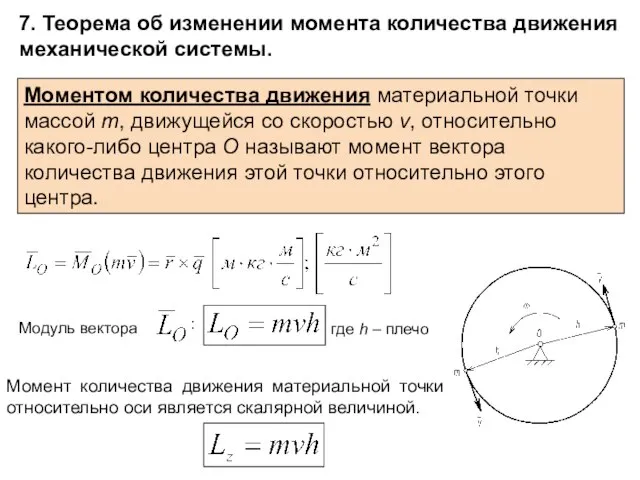
7. Теорема об изменении момента количества движения механической системы.
Моментом количества движения
7. Теорема об изменении момента количества движения механической системы.
Моментом количества движения
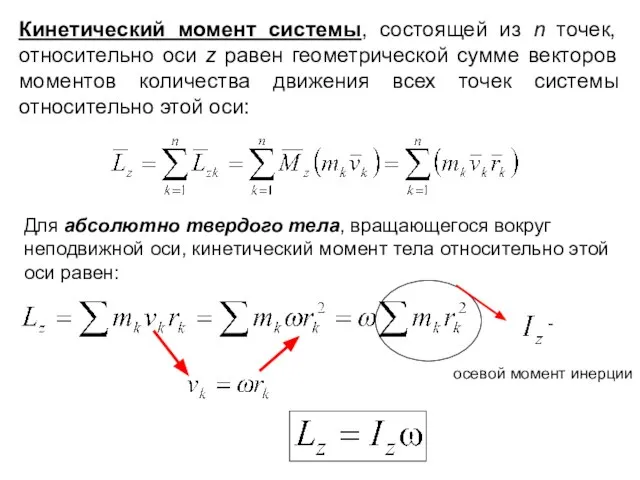
Кинетический момент системы, состоящей из n точек, относительно оси z равен
Кинетический момент системы, состоящей из n точек, относительно оси z равен
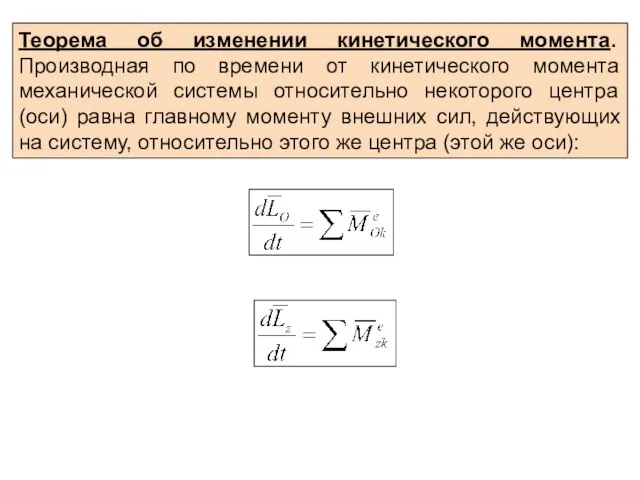
Теорема об изменении кинетического момента. Производная по времени от кинетического момента
Теорема об изменении кинетического момента. Производная по времени от кинетического момента
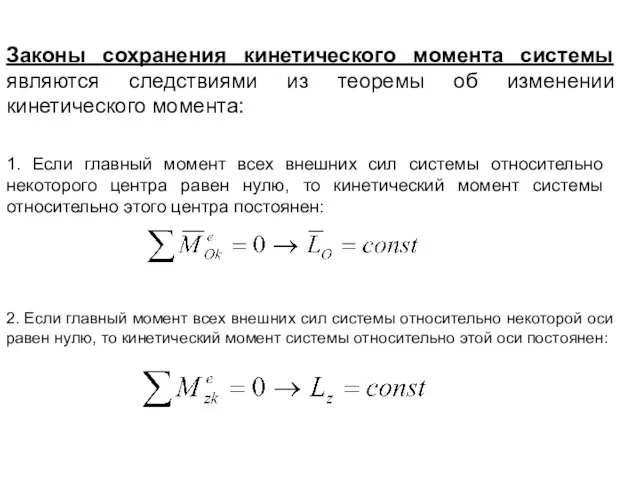
Законы сохранения кинетического момента системы являются следствиями из теоремы об изменении
Законы сохранения кинетического момента системы являются следствиями из теоремы об изменении
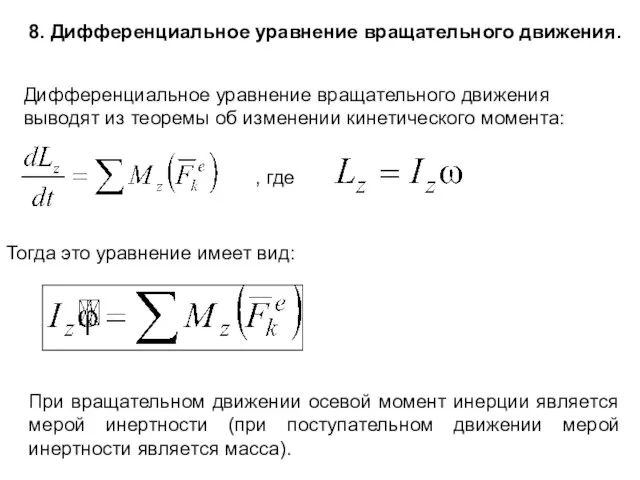
8. Дифференциальное уравнение вращательного движения.
Дифференциальное уравнение вращательного движения выводят из
8. Дифференциальное уравнение вращательного движения.
Дифференциальное уравнение вращательного движения выводят из
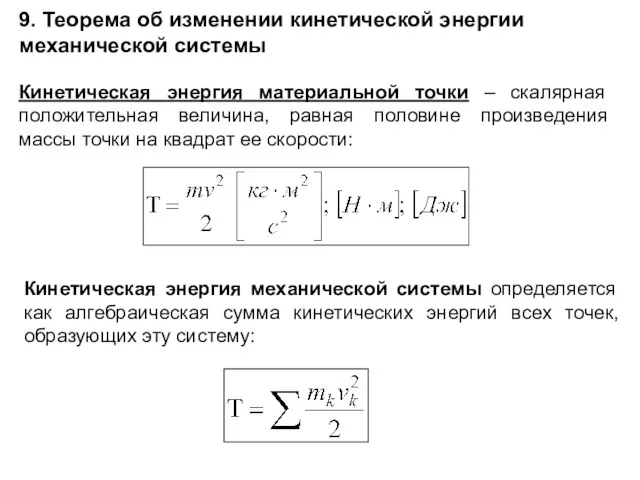
Кинетическая энергия материальной точки – скалярная положительная величина, равная половине произведения
Кинетическая энергия материальной точки – скалярная положительная величина, равная половине произведения
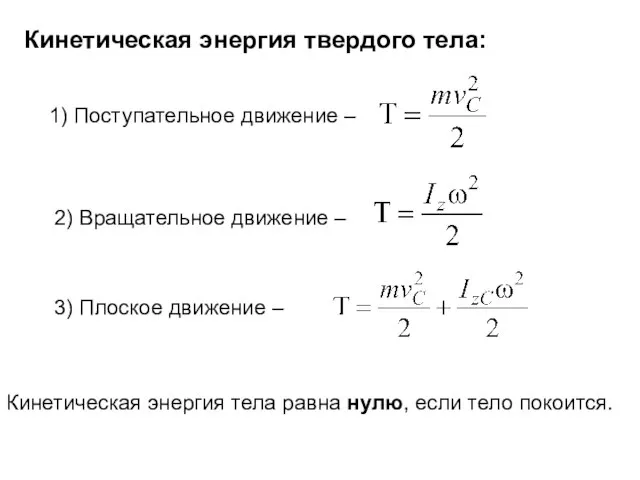
Кинетическая энергия твердого тела:
1) Поступательное движение –
2) Вращательное движение –
Кинетическая энергия твердого тела:
1) Поступательное движение –
2) Вращательное движение –
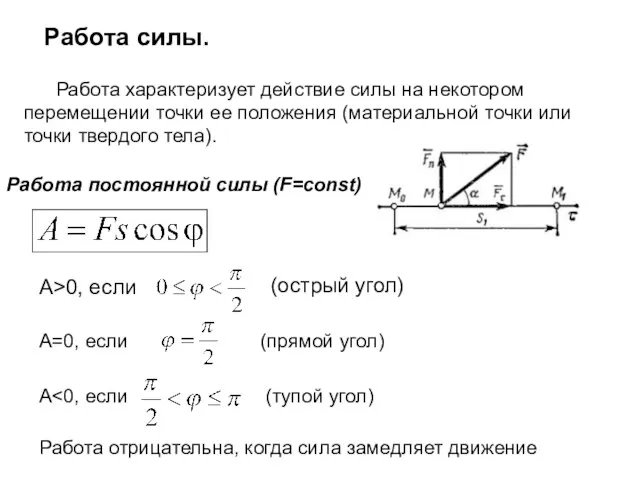
Работа силы.
Работа характеризует действие силы на некотором перемещении точки ее
Работа силы.
Работа характеризует действие силы на некотором перемещении точки ее
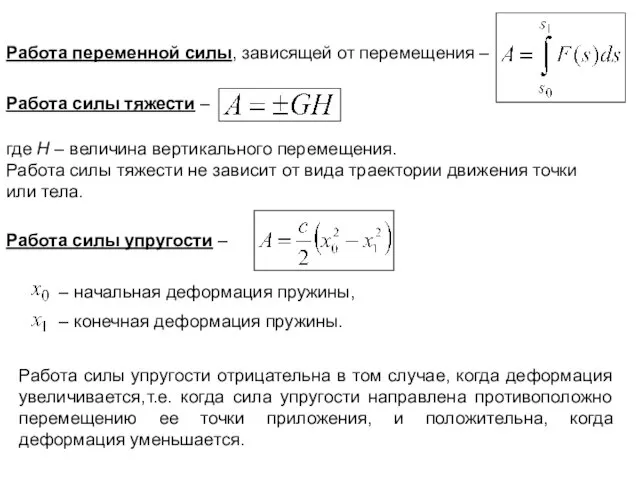
Работа переменной силы, зависящей от перемещения –
Работа силы тяжести –
Работа переменной силы, зависящей от перемещения –
Работа силы тяжести –
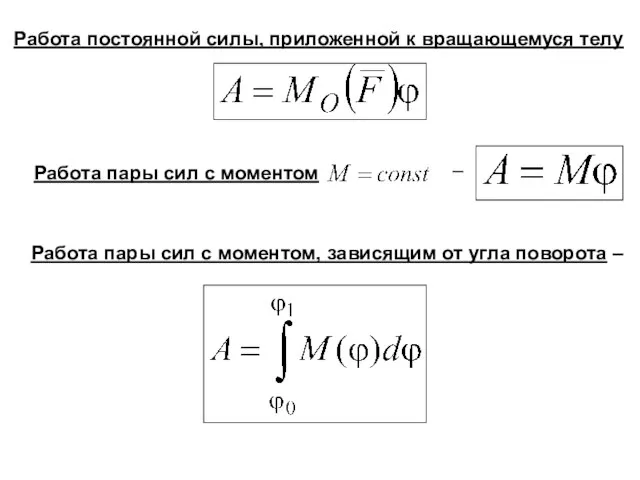
Работа постоянной силы, приложенной к вращающемуся телу
Работа пары сил с
Работа постоянной силы, приложенной к вращающемуся телу
Работа пары сил с
 Методы наблюдения и регистрации элементарных частиц
Методы наблюдения и регистрации элементарных частиц Нормативные документы. «Защита от шума». «Проектирование звукоизоляции ограждающих конструкций жилых и общественных зданий»
Нормативные документы. «Защита от шума». «Проектирование звукоизоляции ограждающих конструкций жилых и общественных зданий» Материалтану саласындағы нанотехнологиялар
Материалтану саласындағы нанотехнологиялар Структура и спектрально-люминесцентные характеристики керамики Y2O3:Er
Структура и спектрально-люминесцентные характеристики керамики Y2O3:Er Радиовысотомеры
Радиовысотомеры Свет как электромагнитная волна
Свет как электромагнитная волна Динамика вращательного движения. (Лекция 5)
Динамика вращательного движения. (Лекция 5) Презентация по физике "Начало атомной физики" - скачать _
Презентация по физике "Начало атомной физики" - скачать _ Теплотехника. Основы технической термодинамики
Теплотехника. Основы технической термодинамики Шкала электромагнитных волн
Шкала электромагнитных волн Сызықты емес элементтер бар электр тізбектері және оларды есептеу әдістері.Таралған параметрлі тізбек жайындағы ұғымдар
Сызықты емес элементтер бар электр тізбектері және оларды есептеу әдістері.Таралған параметрлі тізбек жайындағы ұғымдар Назначение, устройство, принцип действия кривошипно-шатунного механизма (КШМ). Тема 2.1.2
Назначение, устройство, принцип действия кривошипно-шатунного механизма (КШМ). Тема 2.1.2 Молекулярная физика
Молекулярная физика Открытие магнитного поля. Параметры, характеризующие магнитное поле. Магнитная проницаемость среды
Открытие магнитного поля. Параметры, характеризующие магнитное поле. Магнитная проницаемость среды Пьезоэлектрический преобразователь с оптическим управлением
Пьезоэлектрический преобразователь с оптическим управлением Презентация по физике "Реактивное движение физика" - скачать
Презентация по физике "Реактивное движение физика" - скачать 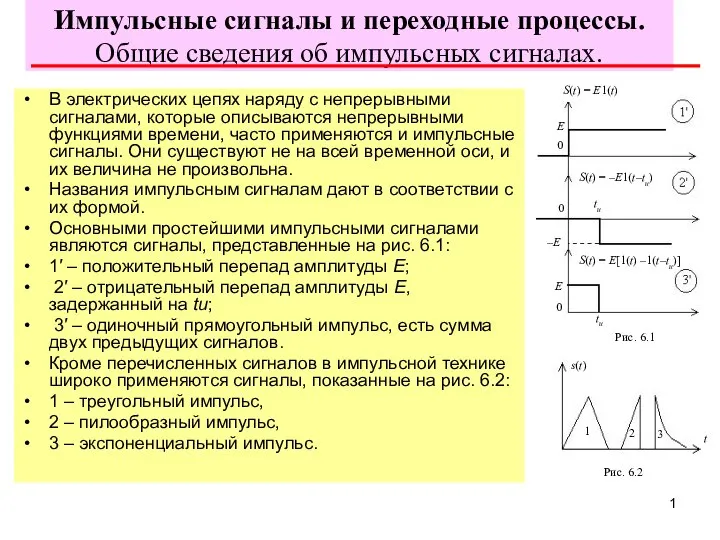 Импульсные сигналы и переходные процессы. Общие сведения об импульсных сигналах
Импульсные сигналы и переходные процессы. Общие сведения об импульсных сигналах Формула. Набор символов, написанный по специальным правилам и используемый для расчетов
Формула. Набор символов, написанный по специальным правилам и используемый для расчетов Уравнения электромеханической и механической характеристик асинхронного двигателя и их анализ
Уравнения электромеханической и механической характеристик асинхронного двигателя и их анализ Презентация по физике "«Вольтметр»" - скачать
Презентация по физике "«Вольтметр»" - скачать  Законы Ньютона в литературе
Законы Ньютона в литературе Тиск як зовнішній параметр термодинамічної системи
Тиск як зовнішній параметр термодинамічної системи Термодинамика
Термодинамика Прибор для измерения давления - манометр
Прибор для измерения давления - манометр Кто создал радио? Гульельмо Маркони или Александр Степанович Попов.
Кто создал радио? Гульельмо Маркони или Александр Степанович Попов.  Магистерская диссертация. Технология работы над диссертацией «Электротехнические комплексы и системы»
Магистерская диссертация. Технология работы над диссертацией «Электротехнические комплексы и системы» Электромагнитное поле. (Лекция 6)
Электромагнитное поле. (Лекция 6) Электрооборудование автомобиля. Аккумуляторная батарея
Электрооборудование автомобиля. Аккумуляторная батарея