- Ievadlekcija Materiala punkta kinematika

Содержание
- 2. Fizikas kursa iedalījums Klasiskā mehānika Termodinamika un molekulārfizika Elektrība un magnētisms Optika Kvantu mehānika Atomfizika Kodolfizika
- 3. IEVADS FIZIKĀ Fizika pēta fundamentālas kustības formu – mehānisko un fizikālo matērijas kustību, mijiedarbības mehānismu starp
- 4. Kā tad attīstās jebkura zinātne? Pirmais jebkuru zināšanu solis ir novērojumi. Uzkrājot pietiekošu daudzumu novērojumu, kas
- 5. MEHĀNIKA. Mehāniku pieņemts dalīt trīs nodaļās: Mehānikā ar kustību saprot tikai materiālo ķermeņu vai ķermeņu daļu
- 6. Ķermeņus attiecībā pret kuriem tiek apskatīta kustība, sauc par atskaites sistēmu. Mūsu Zemi un ar to
- 7. Punkta stāvokli telpā nosaka trīs koordinātes, piemēram, punktam A ir koordinātes x0, y0, z0. Punkta A
- 8. x = x(t) y = y(t) z = z(t) parametriskais kustības pamatvienādojums, kur t ir parametrs.
- 9. Ātruma SI vienība ir 1 m/s. = (1.4) pret Δt, kad Δt tiecas uz nulli ,
- 10. Atvasinot kur lielumus = (1.5) vx; = = vy; = vz sauc par komponentēm vai ātruma
- 11. Kustības laikā var mainīties gan materiālā punkta ātruma modulis, gan arī virziens. Piemēram, laika momentā t
- 12. Paātrinājumu a, kas piemīt materiālam punktam dotajā laika momentā, dotajā trajektorijas punktā, sauc par momentāno paātrinājumu.
- 13. Momentānais paātrinājums ir rādiusvektora otrais atvasinājums pēc laika. Atvasinot pēc laika t no formulas 1.5 iegūsim
- 14. Kustības kinemātiskais vienādojums Kustības veidi: Vienmērīga kustība: v = const.; a = 0 Vienmērīgi paātrināta kustība:
- 15. Kustības vienādojums vienmērīgai un vienmērīgi paātrinātai kustībai Vienmērīga kustība: v = const.; aτ = 0 s
- 16. 1/26 uzdevums Ķermeņa noietā ceļa s atkarību no laika t izsaka vienādojums s = At –
- 18. Скачать презентацию
Fizikas kursa iedalījums
Klasiskā mehānika
Termodinamika un molekulārfizika
Elektrība un magnētisms
Optika
Kvantu mehānika
Atomfizika
Kodolfizika
Fizikas kursa iedalījums
Klasiskā mehānika
Termodinamika un molekulārfizika
Elektrība un magnētisms
Optika
Kvantu mehānika
Atomfizika
Kodolfizika
IEVADS FIZIKĀ
Fizika pēta fundamentālas kustības formu – mehānisko un fizikālo matērijas
IEVADS FIZIKĀ
Fizika pēta fundamentālas kustības formu – mehānisko un fizikālo matērijas
Kā tad attīstās jebkura zinātne?
Pirmais jebkuru zināšanu solis ir novērojumi.
Kā tad attīstās jebkura zinātne?
Pirmais jebkuru zināšanu solis ir novērojumi.
MEHĀNIKA.
Mehāniku pieņemts dalīt trīs nodaļās:
Mehānikā ar kustību saprot tikai materiālo ķermeņu
MEHĀNIKA.
Mehāniku pieņemts dalīt trīs nodaļās:
Mehānikā ar kustību saprot tikai materiālo ķermeņu
Ķermeņus attiecībā pret kuriem tiek apskatīta kustība, sauc par atskaites sistēmu.
Ķermeņus attiecībā pret kuriem tiek apskatīta kustība, sauc par atskaites sistēmu.
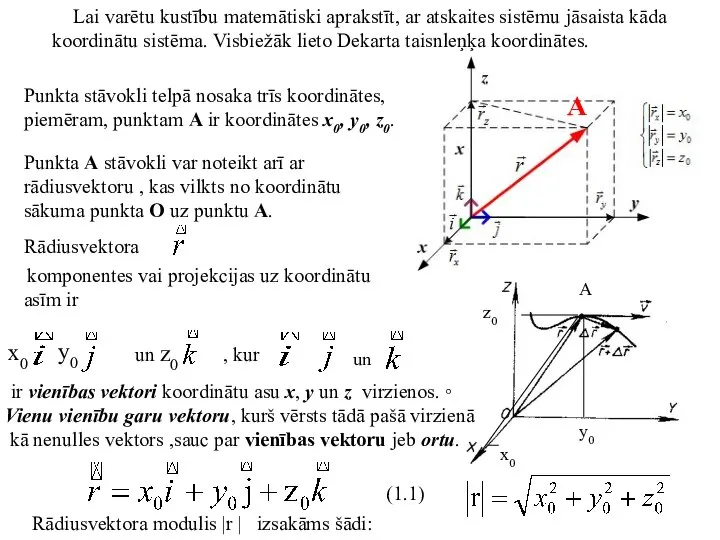
Punkta stāvokli telpā nosaka trīs koordinātes, piemēram, punktam A ir koordinātes
Punkta stāvokli telpā nosaka trīs koordinātes, piemēram, punktam A ir koordinātes
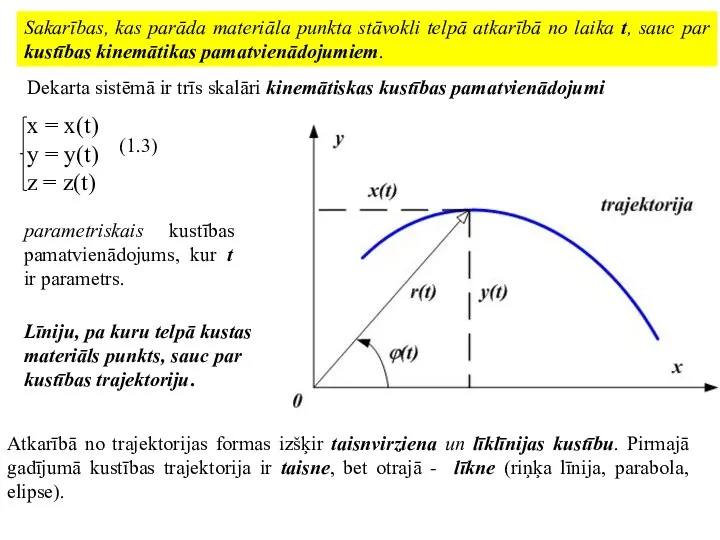
x = x(t)
y = y(t)
z = z(t)
parametriskais kustības pamatvienādojums, kur t
x = x(t)
y = y(t)
z = z(t)
parametriskais kustības pamatvienādojums, kur t
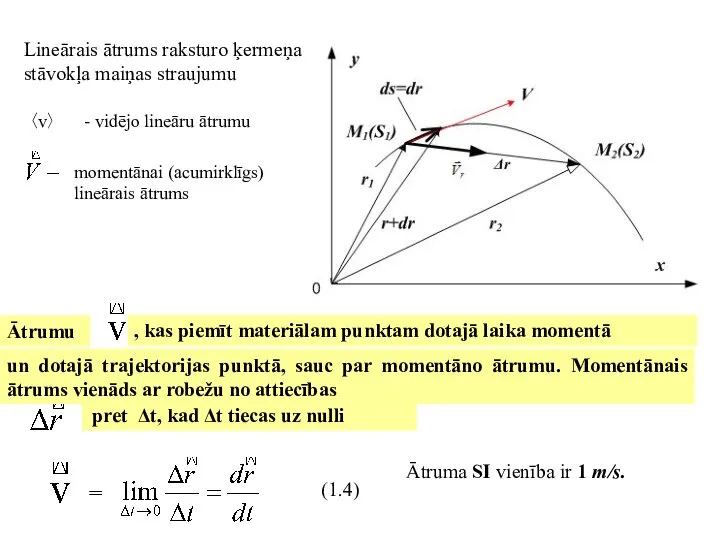
Ātruma SI vienība ir 1 m/s.
=
(1.4)
pret Δt, kad Δt
Ātruma SI vienība ir 1 m/s.
=
(1.4)
pret Δt, kad Δt
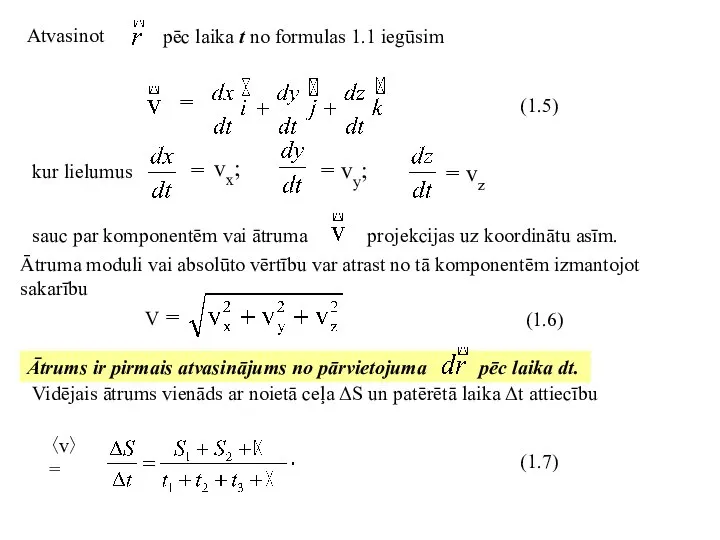
Atvasinot
kur lielumus
=
(1.5)
vx;
=
= vy;
= vz
sauc
Atvasinot
kur lielumus
=
(1.5)
vx;
=
= vy;
= vz
sauc
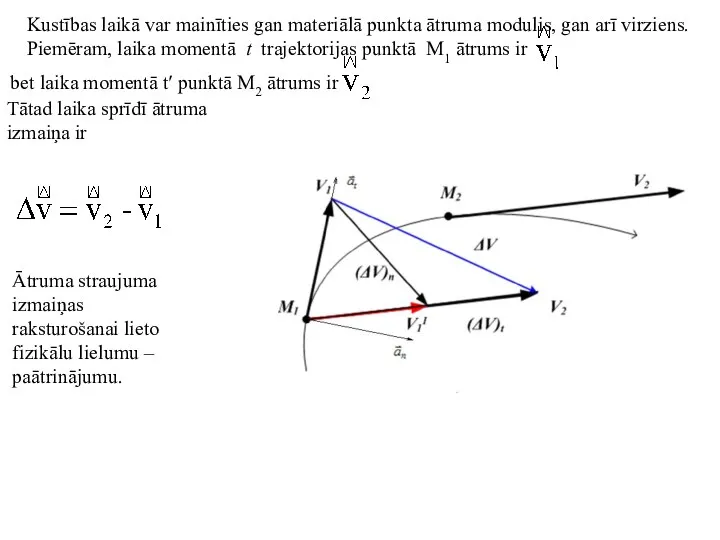
Kustības laikā var mainīties gan materiālā punkta ātruma modulis, gan arī
Kustības laikā var mainīties gan materiālā punkta ātruma modulis, gan arī
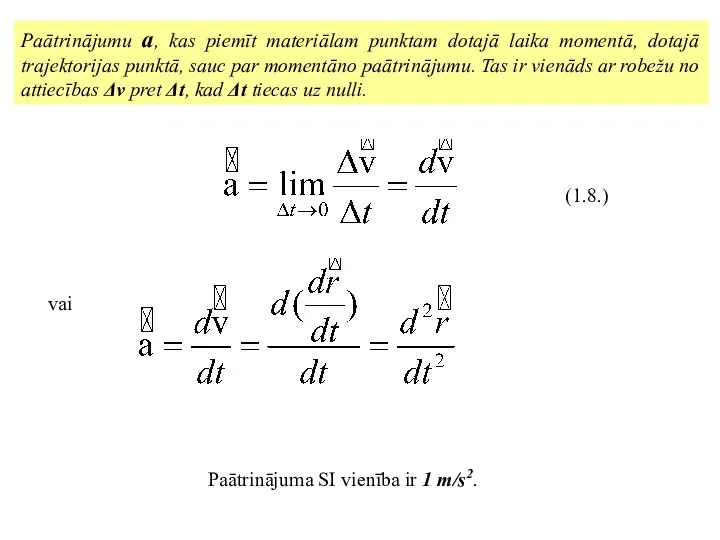
Paātrinājumu a, kas piemīt materiālam punktam dotajā laika momentā, dotajā trajektorijas
Paātrinājumu a, kas piemīt materiālam punktam dotajā laika momentā, dotajā trajektorijas
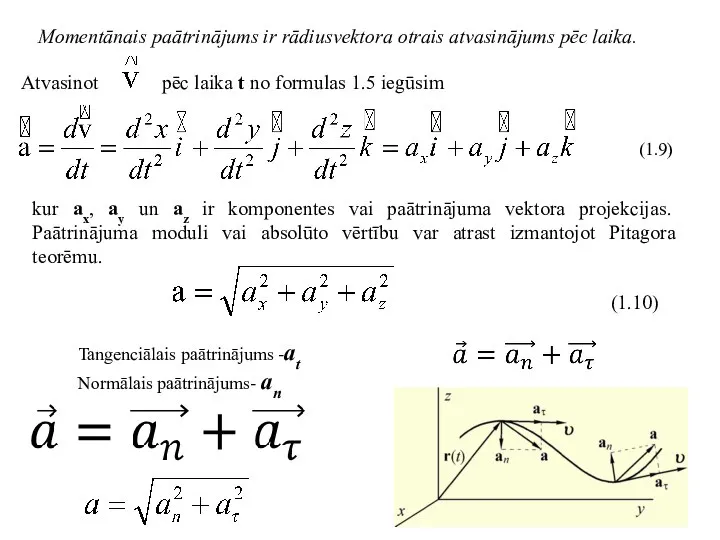
Momentānais paātrinājums ir rādiusvektora otrais atvasinājums pēc laika.
Atvasinot pēc laika t
Momentānais paātrinājums ir rādiusvektora otrais atvasinājums pēc laika.
Atvasinot pēc laika t
Kustības kinemātiskais vienādojums
Kustības veidi:
Vienmērīga kustība: v = const.; a = 0
Vienmērīgi
Kustības kinemātiskais vienādojums
Kustības veidi:
Vienmērīga kustība: v = const.; a = 0
Vienmērīgi
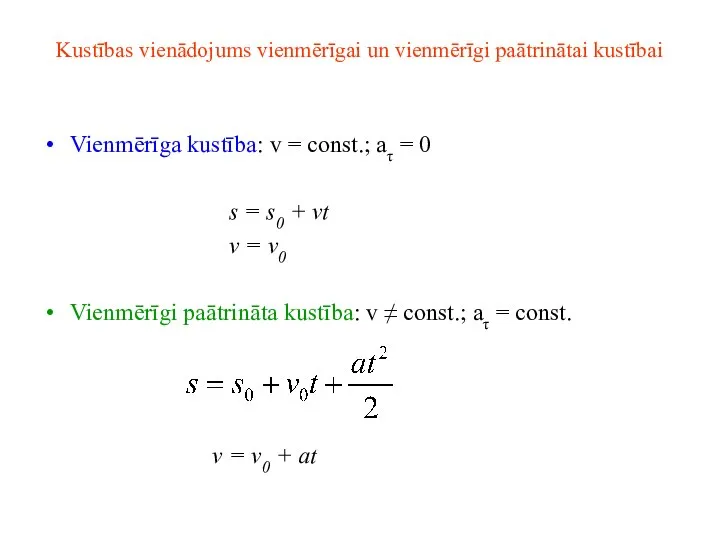
Kustības vienādojums vienmērīgai un vienmērīgi paātrinātai kustībai
Vienmērīga kustība: v = const.;
Kustības vienādojums vienmērīgai un vienmērīgi paātrinātai kustībai
Vienmērīga kustība: v = const.;
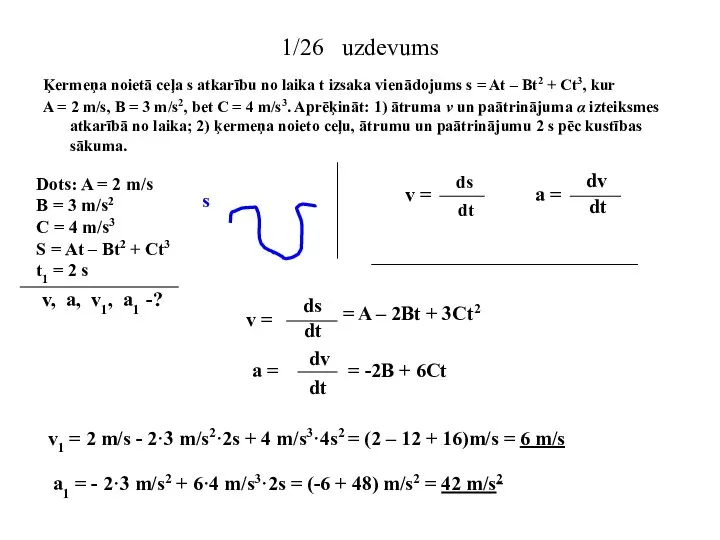
1/26 uzdevums
Ķermeņa noietā ceļa s atkarību no laika t izsaka vienādojums
1/26 uzdevums
Ķermeņa noietā ceļa s atkarību no laika t izsaka vienādojums
 Работа силы тяжести
Работа силы тяжести Элементы кинетической теории газов. (Лекция 2)
Элементы кинетической теории газов. (Лекция 2) Презентация Харитоненко Александра «Альтернативные виды энергии»
Презентация Харитоненко Александра «Альтернативные виды энергии»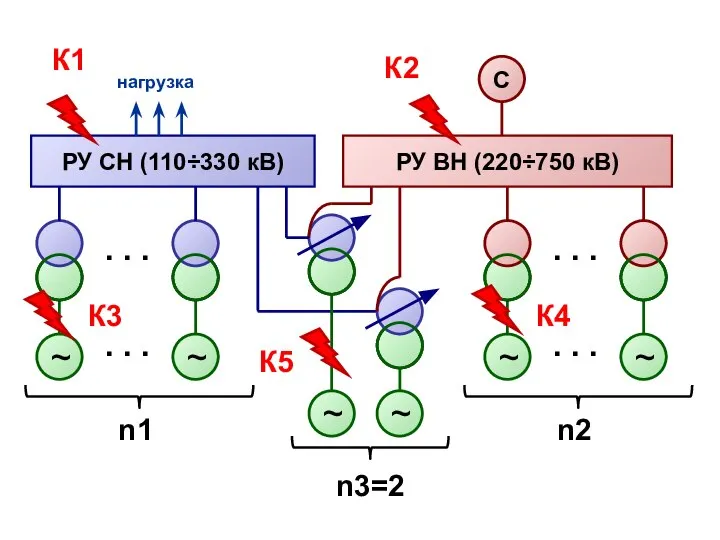 Расчёт ТКЗ схемы замещения
Расчёт ТКЗ схемы замещения Напряжения. Связь внутренних усилий и напряжений
Напряжения. Связь внутренних усилий и напряжений Тензор магнитной восприимчивости. Закон изменения момента импульса
Тензор магнитной восприимчивости. Закон изменения момента импульса Левитация проводящего кольца в переменном магнитном поле
Левитация проводящего кольца в переменном магнитном поле Переменный ток
Переменный ток Петрофизика и геофизические исследования скважин (ГИС)
Петрофизика и геофизические исследования скважин (ГИС) Закони Кеплера
Закони Кеплера Уравнение Ландау-Лифшица. Тензор магнитной проницаемости и восприимчивости
Уравнение Ландау-Лифшица. Тензор магнитной проницаемости и восприимчивости Атомные электростанции (АЭС)
Атомные электростанции (АЭС) Техническое обслуживание велосипеда
Техническое обслуживание велосипеда Сообщающиеся сосуды Урок в 7 классе Разработан учителем высшей категории МОУ «Уйская СОШ» Татарниковой Л.П. 2007 г.
Сообщающиеся сосуды Урок в 7 классе Разработан учителем высшей категории МОУ «Уйская СОШ» Татарниковой Л.П. 2007 г. Оптические иллюзии
Оптические иллюзии Диэлектрические материалы
Диэлектрические материалы Эффективность использования противотурбулентной присадки на участке трубопровода «Ярославль-Москва»
Эффективность использования противотурбулентной присадки на участке трубопровода «Ярославль-Москва» Детали механизмов и машин. Подшипники скольжения
Детали механизмов и машин. Подшипники скольжения Сдвиг. Кручение. (Лекция 10)
Сдвиг. Кручение. (Лекция 10) Антенны. Линейные излучающие системы. Электрические параметры симметричных и несимметричных вибраторов. (Лекция 14. Модуль 2.2)
Антенны. Линейные излучающие системы. Электрические параметры симметричных и несимметричных вибраторов. (Лекция 14. Модуль 2.2) Аттестационная работа. Методическя разработка по физике: Замена человека на производстве роботизированный манипулятор
Аттестационная работа. Методическя разработка по физике: Замена человека на производстве роботизированный манипулятор Қатты диэлектриктің жылулық және ионизациялық тесілуі
Қатты диэлектриктің жылулық және ионизациялық тесілуі История возникновения нанотехнологий и науки о наноматериалах
История возникновения нанотехнологий и науки о наноматериалах Демонстрационный вариант контрольных измерительных материалов единого государственного экзамена 2010 года по физике
Демонстрационный вариант контрольных измерительных материалов единого государственного экзамена 2010 года по физике Общая характеристика АФУ телекоммуникационных систем
Общая характеристика АФУ телекоммуникационных систем Электромагнитные колебания. Открытый банк заданий
Электромагнитные колебания. Открытый банк заданий Uzsildīšanas shēmas un to aprēķins
Uzsildīšanas shēmas un to aprēķins Никель-кадмиевые аккумуляторные батареи
Никель-кадмиевые аккумуляторные батареи