- Конструкция беспилотного летательного аппарата

Содержание
- 2. Первый квадрокоптер Г.А.Ботезата (1923)
- 4. Виды квадрокоптеров
- 5. Parrot AR.Drone 2.0
- 6. Квадрокоптер eXplay EXPLORERS INTRUDE
- 7. PL-2500
- 8. Виды беспилотников самолетного типа
- 9. Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK
- 10. БПАК Р-100
- 11. Украинский Р-100
- 12. БПЛА «Застава»
- 13. ZALA AERO 421-08М
- 14. Варианты использования дронов И много других сфер использования…
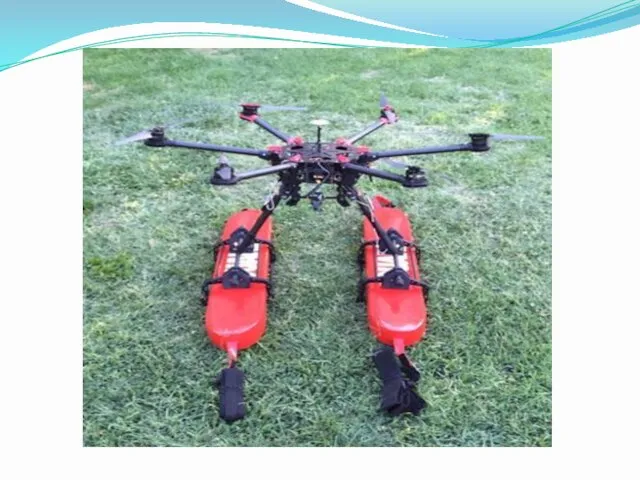
- 15. Спасательные работы
- 21. Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия между роботами. Разработан трехкилограммовый робот-разведчик
- 22. БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом преимуществ, таких как: надежность и
- 23. Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес каждого винтика), жесткой (чтобы выдерживать
- 24. Пульт дистанционного управления
- 25. DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми возможностями проведения продвинутых полетов и
- 26. DJI Phantom 3 Advanced
- 28. Скачать презентацию
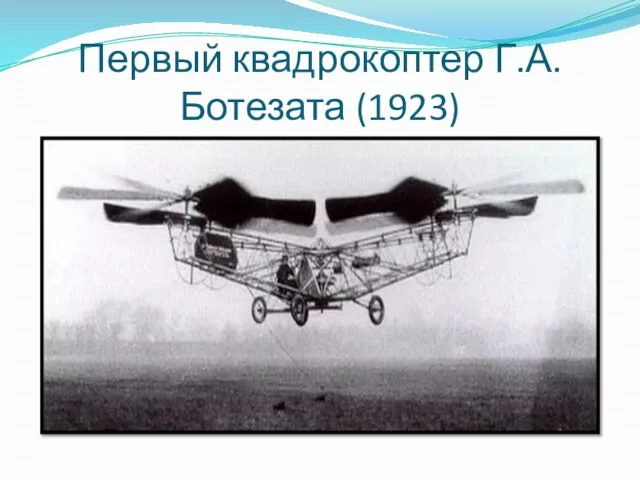
Первый квадрокоптер Г.А.Ботезата (1923)
Первый квадрокоптер Г.А.Ботезата (1923)


Виды квадрокоптеров
Виды квадрокоптеров

Parrot AR.Drone 2.0
Parrot AR.Drone 2.0

Квадрокоптер eXplay
EXPLORERS INTRUDE
Квадрокоптер eXplay
EXPLORERS INTRUDE
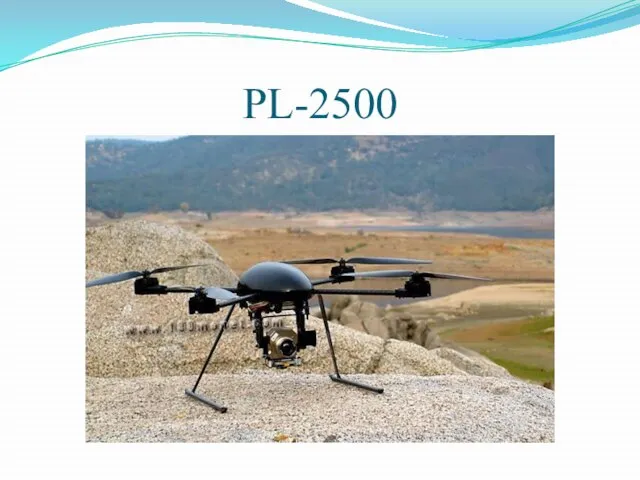
PL-2500
PL-2500

Виды беспилотников
самолетного типа
Виды беспилотников
самолетного типа

Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK
Дальний высотный беспилотный разведчик NORTHROP RQ-4 GLOBAL HAWK

БПАК Р-100
БПАК Р-100

Украинский Р-100
Украинский Р-100

БПЛА «Застава»
БПЛА «Застава»

ZALA AERO 421-08М
ZALA AERO 421-08М
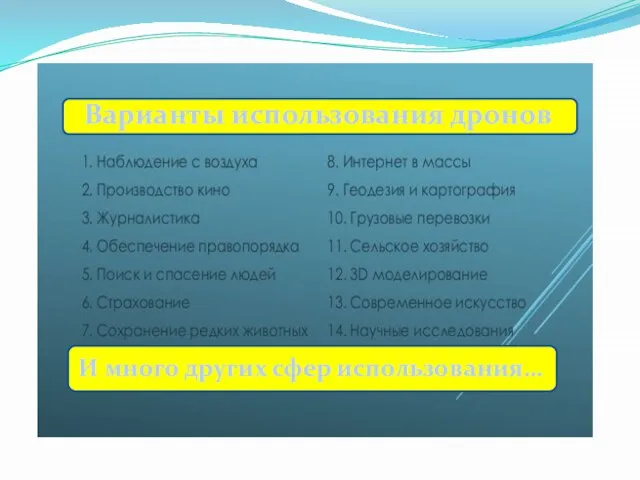
Варианты использования дронов
И много других сфер использования…
Варианты использования дронов
И много других сфер использования…

Спасательные работы
Спасательные работы




Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия
Энтузиасты нашли применение квадрокоптерам в аэрофотосъемке, использовали их при отладке взаимодействия
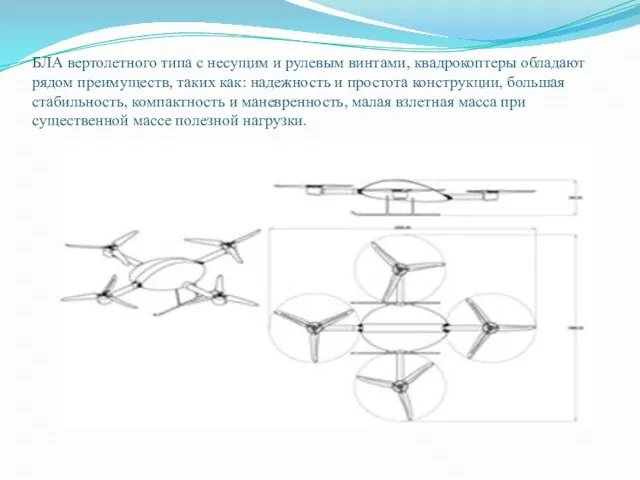
БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом
БЛА вертолетного типа с несущим и рулевым винтами, квадрокоптеры обладают рядом

Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес
Размещены все узлы на раме. Рама должна быть сбалансированной (значим вес

Пульт дистанционного управления
Пульт дистанционного управления

DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми
DJI Phantom 3 Advanced – это мощный квадрокоптер, который обладает всеми

DJI Phantom 3 Advanced
DJI Phantom 3 Advanced
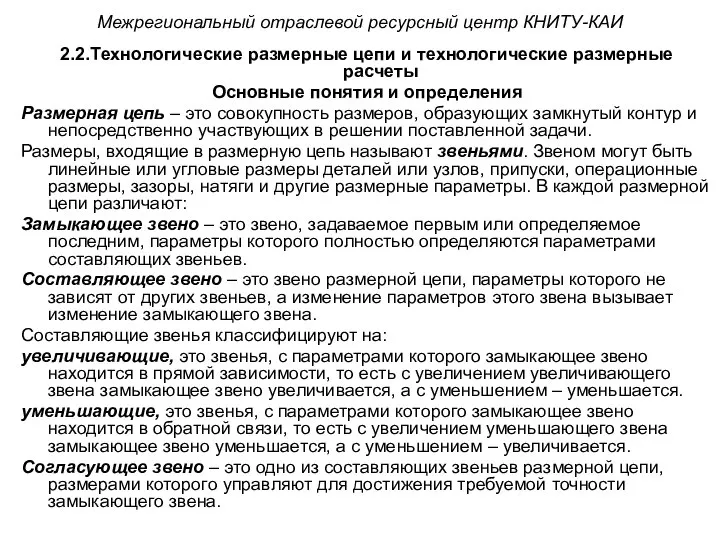 Технологические размерные расчеты. (Раздел 2.2)
Технологические размерные расчеты. (Раздел 2.2) Большой aдронный коллайдер (БАК)
Большой aдронный коллайдер (БАК) Циклы поршневых двигателей внутреннего сгорания
Циклы поршневых двигателей внутреннего сгорания Физика конденсированного состояния
Физика конденсированного состояния Презентация Тепловые двигатели и их применение.
Презентация Тепловые двигатели и их применение.  Пуск двигателя и начало движения
Пуск двигателя и начало движения Спектры. Качественные задачи - Презентация
Спектры. Качественные задачи - Презентация Дифракция света
Дифракция света Интерференция света
Интерференция света Електрика навколо нас.
Електрика навколо нас.  РАЗДЕЛ 2. Основы теплообмена. Тема № 11. Основные понятия и определения, теплопроводность. 11.1. ВИДЫ ТЕПЛООБМЕНА И ОСНОВНЫЕ ПОНЯТ
РАЗДЕЛ 2. Основы теплообмена. Тема № 11. Основные понятия и определения, теплопроводность. 11.1. ВИДЫ ТЕПЛООБМЕНА И ОСНОВНЫЕ ПОНЯТ Исследование зависимости скорости шарика от его радиуса при движении в вязкой жидкости
Исследование зависимости скорости шарика от его радиуса при движении в вязкой жидкости Основы теории оболочек. Общие сведения о тонких пластинах
Основы теории оболочек. Общие сведения о тонких пластинах Поверхностное натяжение. Термодинамика жидкостей
Поверхностное натяжение. Термодинамика жидкостей Сцинтиляційні детектори
Сцинтиляційні детектори Конденсатор филворд по физике
Конденсатор филворд по физике §8. Плоскопараллельное движение твердого тела (плоское)
§8. Плоскопараллельное движение твердого тела (плоское) Закон Архимеда. Действие жидкости и газа на погруженное в них тело. Билет 24
Закон Архимеда. Действие жидкости и газа на погруженное в них тело. Билет 24 Применение лазеров в оргтехнике
Применение лазеров в оргтехнике В мире звука МОУ «Средняя общеобразовательная школа №3» Выполнила ученица 9 «А» класса Лапкина Ирина. Балахна 2009 год
В мире звука МОУ «Средняя общеобразовательная школа №3» Выполнила ученица 9 «А» класса Лапкина Ирина. Балахна 2009 год Опиливание заготовок их сортового проката
Опиливание заготовок их сортового проката Атмосферное давление в живой природе
Атмосферное давление в живой природе Өлшеу қателігі. Құрал шкаласының және жүйелік қателерді есепке алу. Қос қателікті бағалау
Өлшеу қателігі. Құрал шкаласының және жүйелік қателерді есепке алу. Қос қателікті бағалау Акустична левітація
Акустична левітація Энергия электростатического поля. Плотность энергии
Энергия электростатического поля. Плотность энергии Конвекция и излучение
Конвекция и излучение Пушкин и физика
Пушкин и физика Физика и музыка
Физика и музыка