- Микроподводные движители. Виды микро-движителей

Содержание
- 2. Движитель Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного
- 3. Виды микро-движителей Имитирующий гусеницу и червями (движитель – тело робота). «Рыбий хвост» (движитель – тело робота,
- 5. Плюсы использования движителей на основе бионических принципов являются экологически чистыми; обладают высокой эффективностью; имеют малый уровень
- 6. Материалы для движителей Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую
- 7. Материал движителей - электроактивные полимеры Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при приложении к ним
- 8. Преимущества электроактивных полимеров в качестве искусственных мышц: - движение контролируется электрически; - малый вес; - полностью
- 9. Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные ЭАП, внутри групп имеется более
- 10. К их достоинствам относятся: - большие деформации (20-380%); - умеренные механические напряжения (до нескольких МПа в
- 11. Рис.5 - Актюатор с 4-мя степенями свободы Рuc.4 - Принцип работы актюатора из диэлектрического эластомера
- 12. Микродвижитель «Осьминог» Принцип работы данного микродвижителя построен на подачи давления в пневматические контуры. Источником питания используется
- 13. «Осьминог 2»
- 14. Движитель «рыбий хвост» Микроробот Минога
- 15. Гребной винт Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей других
- 16. Разновидности винтов Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также известны как
- 18. Скачать презентацию
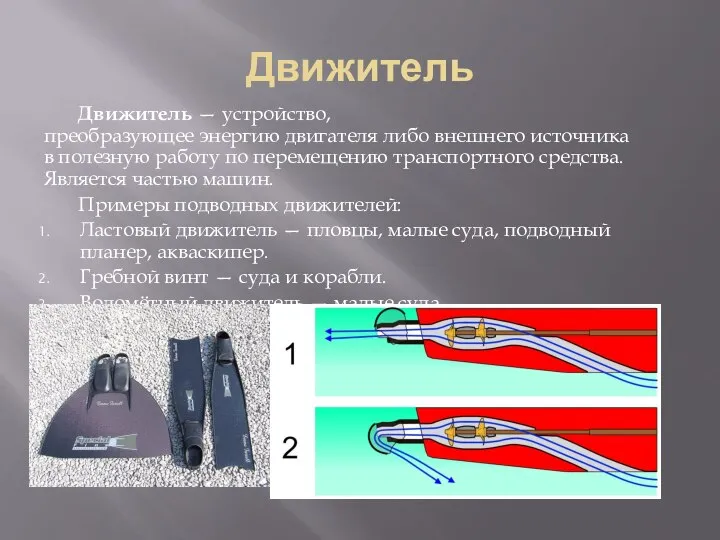
Движитель
Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного средства. Является частью
Движитель
Движитель — устройство, преобразующее энергию двигателя либо внешнего источника в полезную работу по перемещению транспортного средства. Является частью
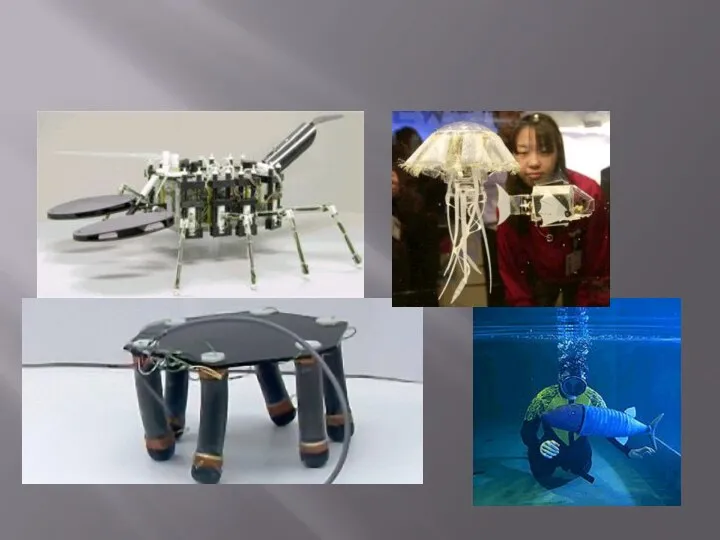
Виды микро-движителей
Имитирующий гусеницу и червями (движитель – тело робота).
«Рыбий хвост» (движитель
Виды микро-движителей
Имитирующий гусеницу и червями (движитель – тело робота).
«Рыбий хвост» (движитель
Плюсы использования движителей на основе бионических принципов
являются экологически чистыми;
обладают высокой эффективностью;
Плюсы использования движителей на основе бионических принципов
являются экологически чистыми;
обладают высокой эффективностью;
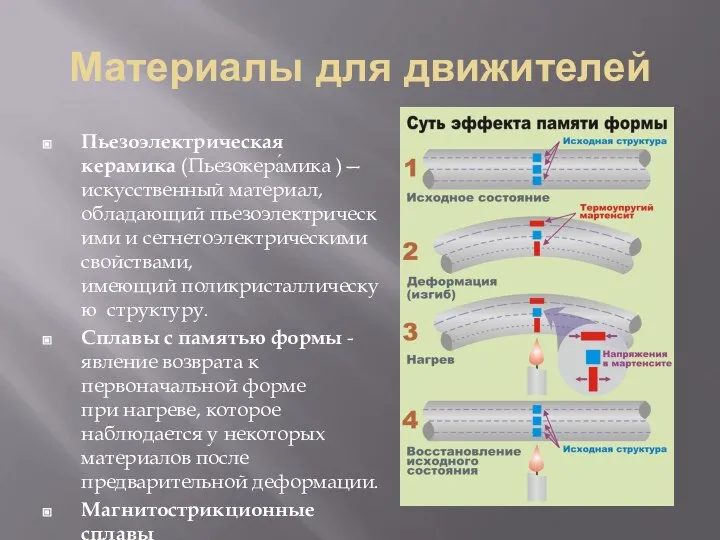
Материалы для движителей
Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую структуру.
Материалы для движителей
Пьезоэлектрическая керамика (Пьезокера́мика )— искусственный материал, обладающий пьезоэлектрическими и сегнетоэлектрическими свойствами, имеющий поликристаллическую структуру.
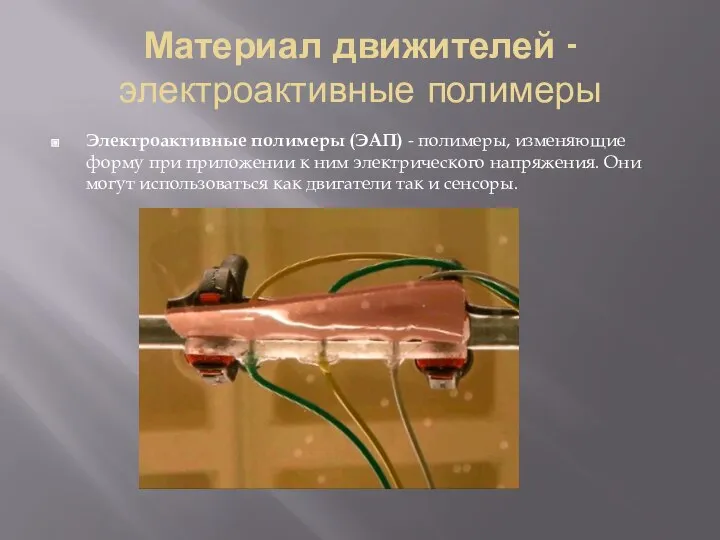
Материал движителей - электроактивные полимеры
Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при
Материал движителей - электроактивные полимеры
Электроактивные полимеры (ЭАП) - полимеры, изменяющие форму при
Преимущества электроактивных полимеров в качестве искусственных мышц:
- движение контролируется электрически;
- малый
Преимущества электроактивных полимеров в качестве искусственных мышц:
- движение контролируется электрически; - малый
Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные
Электроактивные полимеры подразделяются на 2 большие группы: ионные ЭАП и электронные
К их достоинствам относятся:
- большие деформации (20-380%);
- умеренные механические напряжения (до
К их достоинствам относятся:
- большие деформации (20-380%);
- умеренные механические напряжения (до

Рис.5 - Актюатор с 4-мя степенями свободы
Рuc.4 - Принцип работы актюатора
Рис.5 - Актюатор с 4-мя степенями свободы
Рuc.4 - Принцип работы актюатора
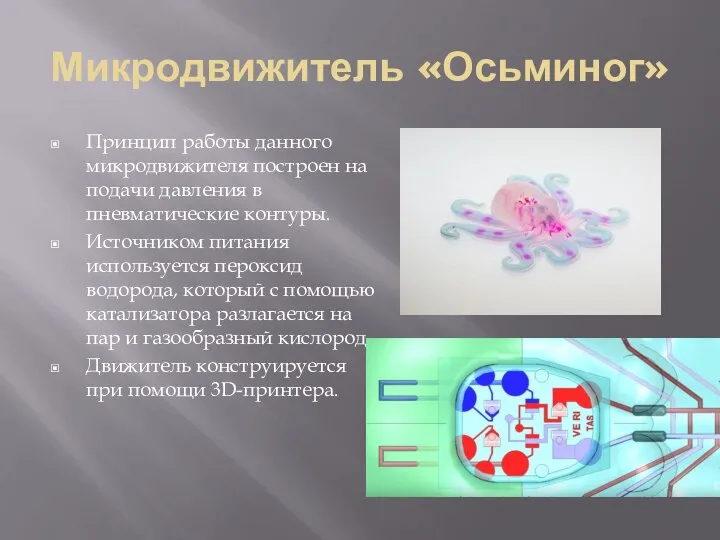
Микродвижитель «Осьминог»
Принцип работы данного микродвижителя построен на подачи давления в пневматические
Микродвижитель «Осьминог»
Принцип работы данного микродвижителя построен на подачи давления в пневматические
«Осьминог 2»
«Осьминог 2»
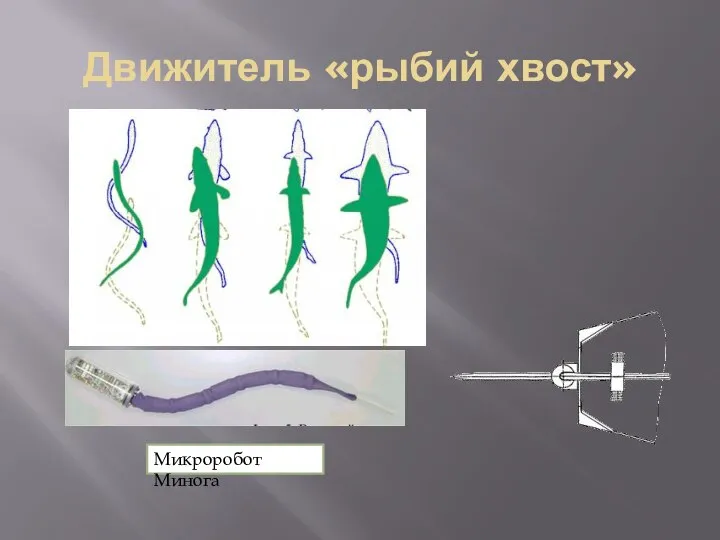
Движитель «рыбий хвост»
Микроробот Минога
Движитель «рыбий хвост»
Микроробот Минога
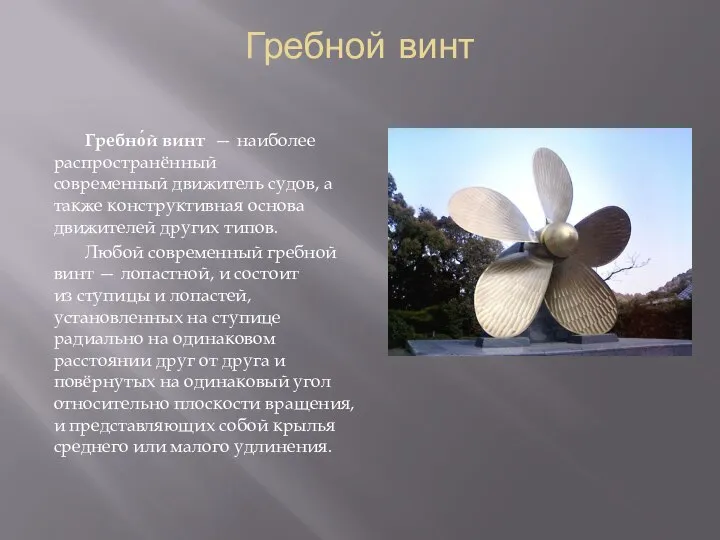
Гребной винт
Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей
Гребной винт
Гребно́й винт — наиболее распространённый современный движитель судов, а также конструктивная основа движителей

Разновидности винтов
Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также
Разновидности винтов
Винты с кольцевым крылом вращаются в открытом полом цилиндре (такие винты также
 Физика в маслёнке Выполнила: Васнева Анастасия Сергеевна Ученица 9 «В» класса ГОУ СОШ № 1338 САО Наставник и руководител
Физика в маслёнке Выполнила: Васнева Анастасия Сергеевна Ученица 9 «В» класса ГОУ СОШ № 1338 САО Наставник и руководител Квантовые свойства света Силина Н. А. – МОУ СОШ №2 П. Редкино
Квантовые свойства света Силина Н. А. – МОУ СОШ №2 П. Редкино Основные понятия о взаимозаменяемости и точности в машиностроении
Основные понятия о взаимозаменяемости и точности в машиностроении Сообщающиеся сосуды
Сообщающиеся сосуды Нанопорошки металлов и их применение в технологии керамических материалов
Нанопорошки металлов и их применение в технологии керамических материалов Диод Шоттки
Диод Шоттки Закон всемирного тяготения
Закон всемирного тяготения Электрическое поле. Напряженность электрического поля. Линии напряженности электрического поля
Электрическое поле. Напряженность электрического поля. Линии напряженности электрического поля Взаимодействие тел. Второй закон Ньютона
Взаимодействие тел. Второй закон Ньютона Опасность лазерного излучения
Опасность лазерного излучения Нагревание воздуха и его температура
Нагревание воздуха и его температура Електричне коло та його складові (9 клас)
Електричне коло та його складові (9 клас) Движение тела по окружности с постоянной по модулю скоростью
Движение тела по окружности с постоянной по модулю скоростью Геометрическая оптика. Радуга
Геометрическая оптика. Радуга Динамика в физике. Динамика в спорте. Динамика в карате
Динамика в физике. Динамика в спорте. Динамика в карате Обратимые и необратимые процессы. Энтропия. Второй закон термодинамики
Обратимые и необратимые процессы. Энтропия. Второй закон термодинамики Электромагнетизм
Электромагнетизм Эффект Доплера в аккустике
Эффект Доплера в аккустике Ламинарное и турбулентное движения газа и жидкости
Ламинарное и турбулентное движения газа и жидкости Система мониторинга водного баланса Балтийского моря
Система мониторинга водного баланса Балтийского моря Тепловые двигатели
Тепловые двигатели Презентация Виды сил 7 класс
Презентация Виды сил 7 класс Конденсаторы. Электрическая емкость
Конденсаторы. Электрическая емкость Проектирование электроснабжения нефтяного месторождения «Небит-Даг»
Проектирование электроснабжения нефтяного месторождения «Небит-Даг» Festkörperphysik. Material design
Festkörperphysik. Material design Презентация по физике "Насыщенный пар. Влажность воздуха" - скачать
Презентация по физике "Насыщенный пар. Влажность воздуха" - скачать  Применение лазерных технологий («лазерный пинцет») для исследования динамики наномашин
Применение лазерных технологий («лазерный пинцет») для исследования динамики наномашин Естественная электрохимическая активность
Естественная электрохимическая активность