- Модели радиолокационных сигналов

Содержание
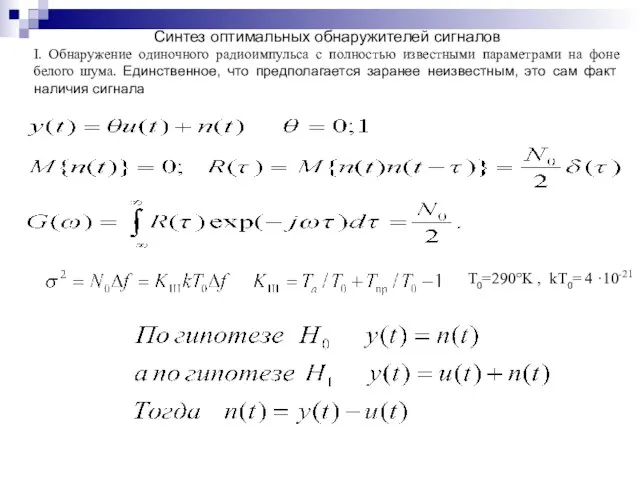
- 2. Синтез оптимальных обнаружителей сигналов I. Обнаружение одиночного радиоимпульса с полностью известными параметрами на фоне белого шума.
- 5. Корреляционная схема обнаружителя с интегратором Корреляционная схема обнаружителя с сумматором
- 6. В оптимальном приёмнике независимо от выбранного критерия должны выполняться следующие операции а) входное напряжение приёмника uвх(t)
- 7. Определим вероятности ошибочных решений (F и Дисперсия на выходе коррелятора или согласованного фильтра Следовательно, ФПРВ выходного
- 8. Для смеси сигнала с шумом Пороговый сигнал определяется как минимальное отношение сигнал-шум, при котором сигнал обнаруживается
- 9. Обнаружение сигнала со случайными параметрами Модель сигнала со случайными параметрами α1, … αn – случайные неизмеряемые
- 11. Т.к. I ′ >> I ″, то используя метод «стационарной фазы» получим
- 12. , где I0(2z/N0) – функция Бесселя первого рода, нулевого порядка
- 13. Характеристики обнаружения Zш – распределение шума, Zсш – распределение смеси сигнала и шума. Модуль вектора Z
- 14. Модуль Zсш будет распределен по закону Релея (Релея – Райса)
- 15. Характеристика обнаружения D(q2) по сравнению со случаем известной начальной фазы смещается вправо. Это связано с тем,
- 16. Обнаружение сигнала со случайной амплитудой и случайной начальной фазой U(t) = AU(t)cos(ω0t + ϕ), ϕ →
- 17. Структура обнаружителя аналогична варианту со случайной начальной фазой, Отличие в величине порога обнаружения: Дисперсия смеси сигнала
- 18. Обнаружение пачки когерентных радиоимпульсов Условие: шум некоррелирован, а сигнал когерентная пачка импульсов
- 19. Структура обнаружителя пачки с неизвестной начальной фазой имеет 2 канала. А обнаружитель сигнала со случайной начальной
- 20. Оптимальная фильтрация Критерии построения оптимального фильтра: Минимума среднеквадратичной ошибки фильтрации (СКО). Максимума отношения с/ш. Максимума апостериорной
- 21. Сигнал на выходе фильтра Мощность (дисперсия) на выходе фильтра
- 22. УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ Дальность действия РЛС в свободном пространстве Дальностью действия радиолокационной станции называется наибольшее
- 23. В условиях нестационарной помеховой обстановки зону обзора РТС (в частности, РЛС) удобно представить в виде ячеистой
- 24. На входе приемного устройства активной РЛС мощность сигнала >qckp, Sa – активная площадь антенны
- 25. Для РЛС с активным ответом Дальность действия запросчика и ответчика должны быть эквивалентными. При прямолинейном распространении
- 26. Дальность действия РЛС в условиях пассивных помех пространстве Pс=KSс, Pп=KSп , где Sс, Sп – эффективные
- 27. где kс, kп – соответственно коэффициенты передачи по мощности сигнала и помехи. μ= . kс=N; kп=Pш/Pп,
- 28. 1 – при действии пассивных помех; 2- при применении методов режекции пассивных помех (РФ).
- 30. Классификация активных помех
- 32. Скачать презентацию
Синтез оптимальных обнаружителей сигналов
I. Обнаружение одиночного радиоимпульса с полностью известными параметрами
Синтез оптимальных обнаружителей сигналов
I. Обнаружение одиночного радиоимпульса с полностью известными параметрами



Корреляционная схема обнаружителя с интегратором
Корреляционная схема обнаружителя с сумматором
Корреляционная схема обнаружителя с интегратором
Корреляционная схема обнаружителя с сумматором
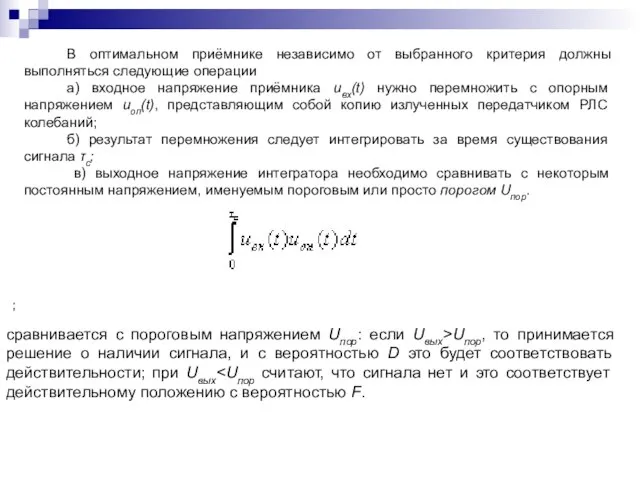
В оптимальном приёмнике независимо от выбранного критерия должны выполняться следующие операции
В оптимальном приёмнике независимо от выбранного критерия должны выполняться следующие операции
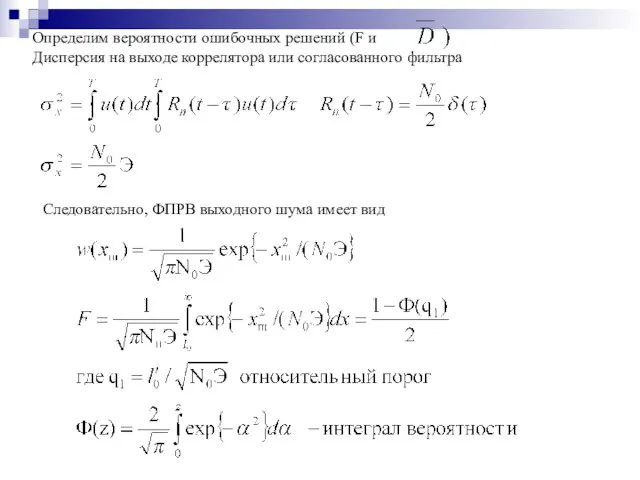
Определим вероятности ошибочных решений (F и
Дисперсия на выходе коррелятора или
Определим вероятности ошибочных решений (F и
Дисперсия на выходе коррелятора или
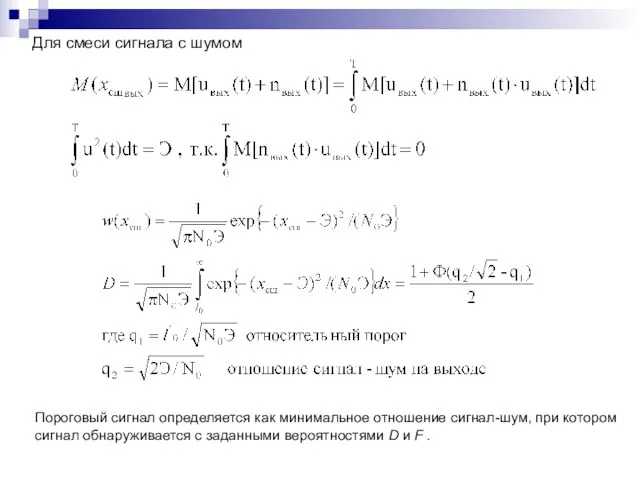
Для смеси сигнала с шумом
Пороговый сигнал определяется как минимальное отношение сигнал-шум,
Для смеси сигнала с шумом
Пороговый сигнал определяется как минимальное отношение сигнал-шум,
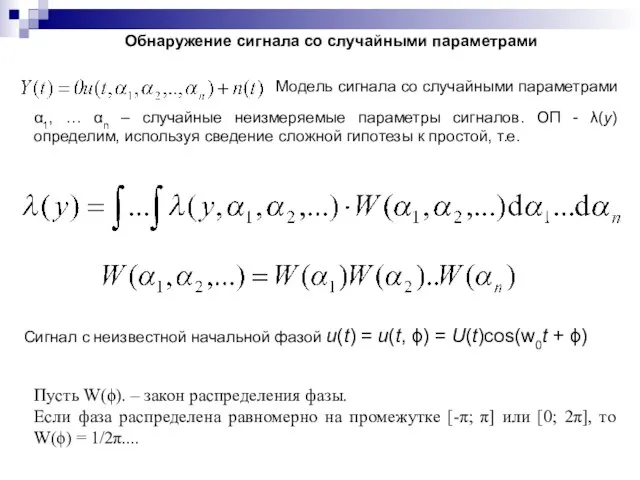
Обнаружение сигнала со случайными параметрами
Модель сигнала со случайными параметрами
α1, …
Обнаружение сигнала со случайными параметрами
Модель сигнала со случайными параметрами
α1, …
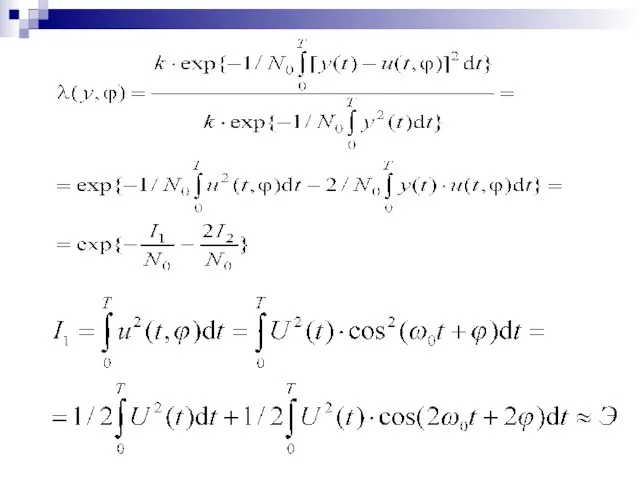

Т.к. I ′ >> I ″, то используя метод «стационарной фазы» получим
Т.к. I ′ >> I ″, то используя метод «стационарной фазы» получим
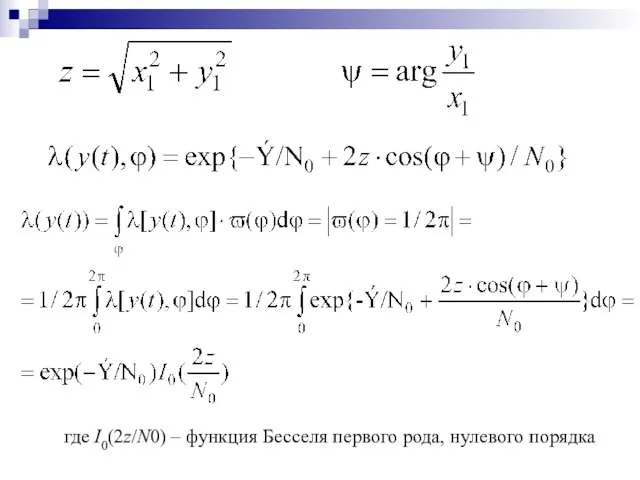
,
где I0(2z/N0) – функция Бесселя первого рода, нулевого порядка
,
где I0(2z/N0) – функция Бесселя первого рода, нулевого порядка
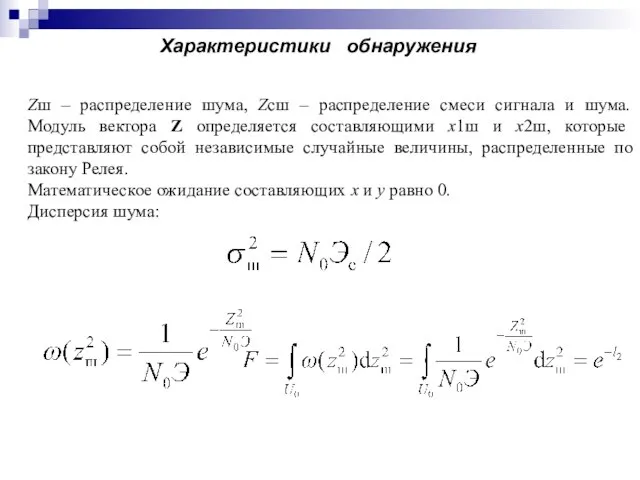
Характеристики обнаружения
Zш – распределение шума, Zсш – распределение смеси сигнала
Характеристики обнаружения
Zш – распределение шума, Zсш – распределение смеси сигнала
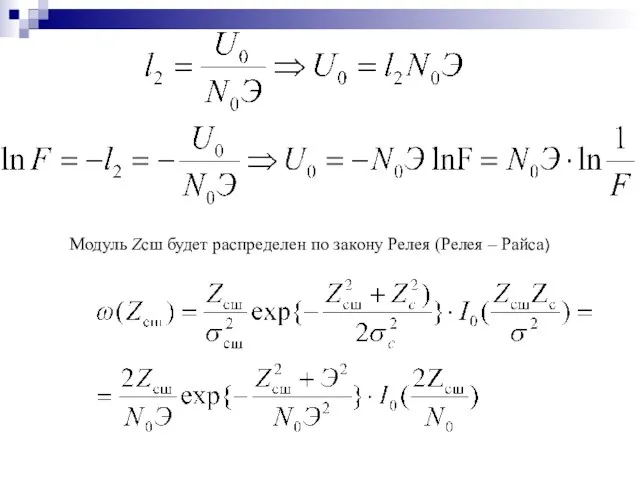
Модуль Zсш будет распределен по закону Релея (Релея – Райса)
Модуль Zсш будет распределен по закону Релея (Релея – Райса)

Характеристика обнаружения D(q2) по сравнению со случаем известной начальной фазы смещается
Характеристика обнаружения D(q2) по сравнению со случаем известной начальной фазы смещается
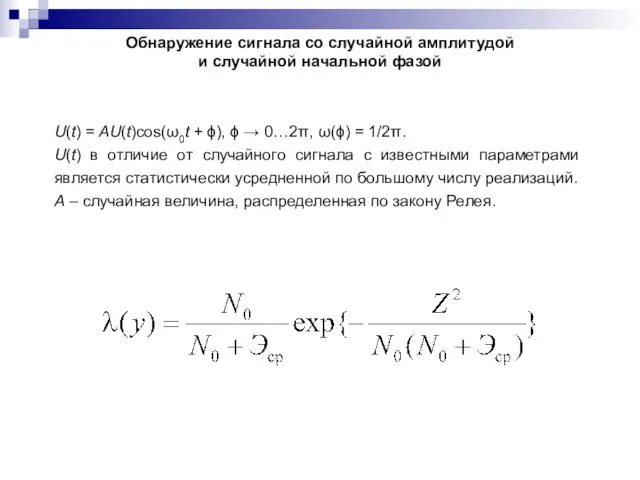
Обнаружение сигнала со случайной амплитудой
и случайной начальной фазой
U(t) = AU(t)cos(ω0t + ϕ), ϕ → 0…2π,
Обнаружение сигнала со случайной амплитудой
и случайной начальной фазой
U(t) = AU(t)cos(ω0t + ϕ), ϕ → 0…2π,
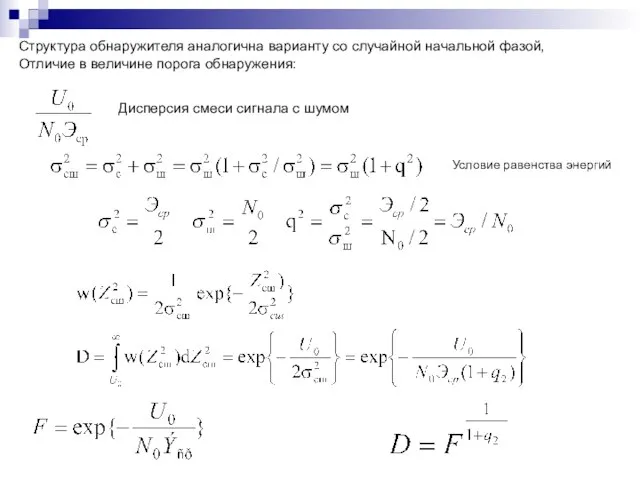
Структура обнаружителя аналогична варианту со случайной начальной фазой,
Отличие в величине порога
Структура обнаружителя аналогична варианту со случайной начальной фазой,
Отличие в величине порога
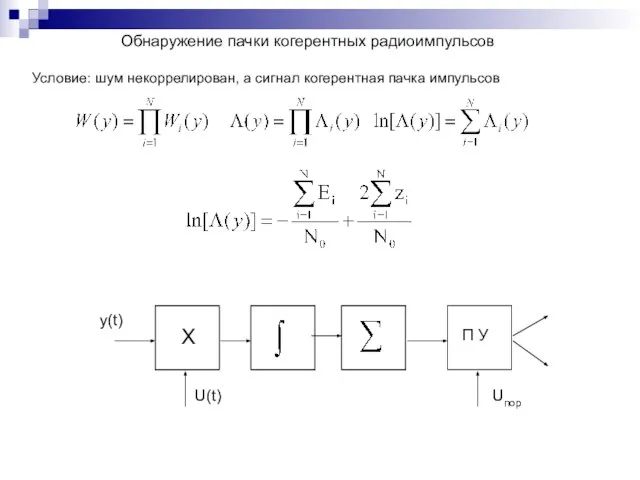
Обнаружение пачки когерентных радиоимпульсов
Условие: шум некоррелирован, а сигнал когерентная пачка импульсов
Обнаружение пачки когерентных радиоимпульсов
Условие: шум некоррелирован, а сигнал когерентная пачка импульсов
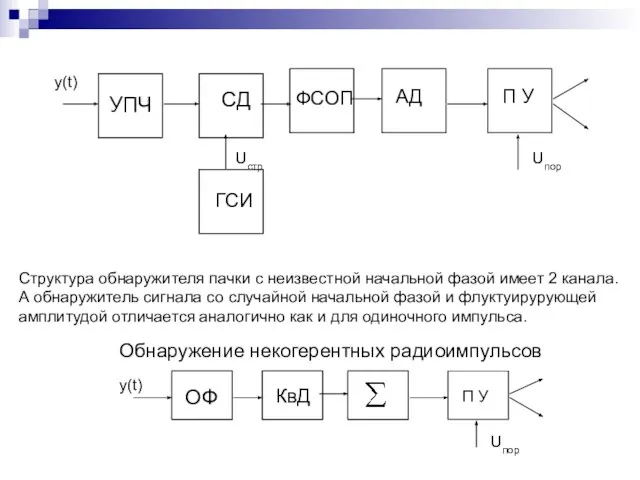
Структура обнаружителя пачки с неизвестной начальной фазой имеет 2 канала.
А обнаружитель
Структура обнаружителя пачки с неизвестной начальной фазой имеет 2 канала.
А обнаружитель

Оптимальная фильтрация
Критерии построения оптимального фильтра:
Минимума среднеквадратичной ошибки фильтрации (СКО).
Максимума отношения с/ш.
Максимума
Оптимальная фильтрация
Критерии построения оптимального фильтра:
Минимума среднеквадратичной ошибки фильтрации (СКО).
Максимума отношения с/ш.
Максимума
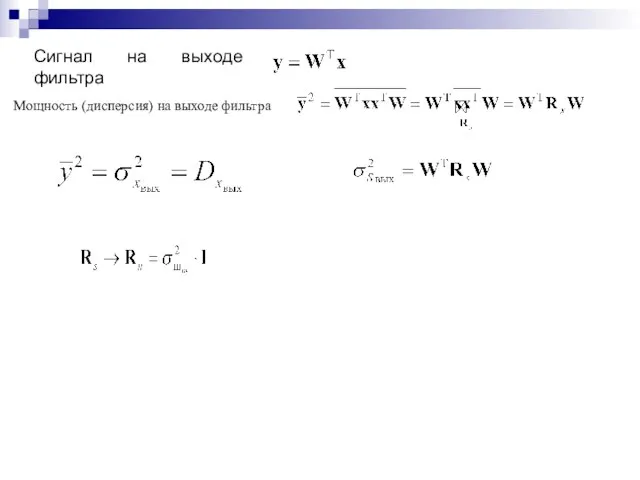
Сигнал на выходе фильтра
Мощность (дисперсия) на выходе фильтра
Сигнал на выходе фильтра
Мощность (дисперсия) на выходе фильтра
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
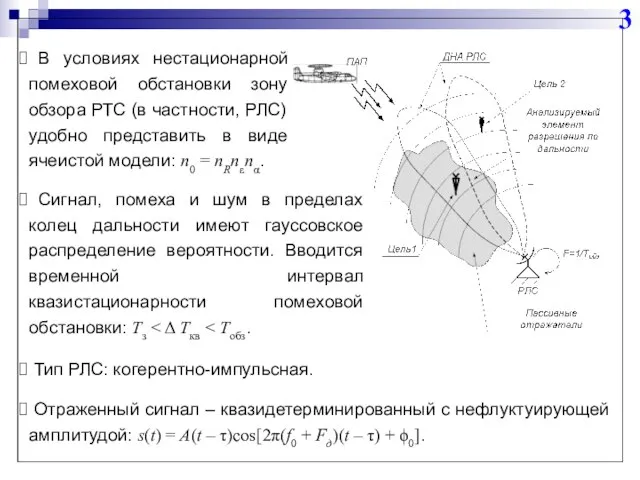
В условиях нестационарной помеховой обстановки зону обзора РТС (в частности,
В условиях нестационарной помеховой обстановки зону обзора РТС (в частности,

На входе приемного устройства активной РЛС мощность сигнала
>qckp,
Sa – активная площадь
На входе приемного устройства активной РЛС мощность сигнала
>qckp,
Sa – активная площадь
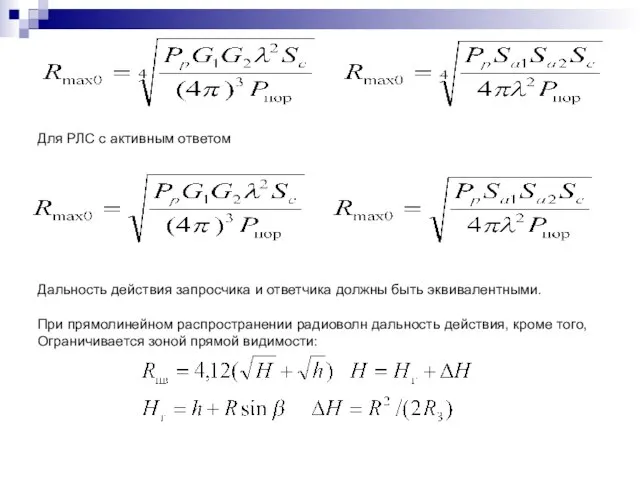
Для РЛС с активным ответом
Дальность действия запросчика и ответчика должны быть
Для РЛС с активным ответом
Дальность действия запросчика и ответчика должны быть
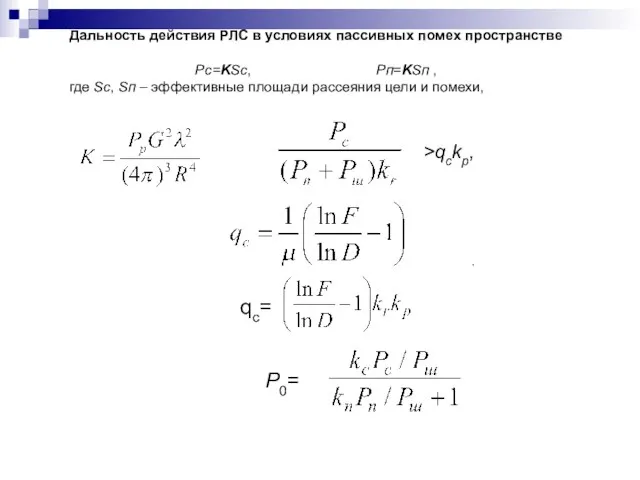
Дальность действия РЛС в условиях пассивных помех пространстве
Pс=KSс, Pп=KSп ,
где Sс,
Дальность действия РЛС в условиях пассивных помех пространстве
Pс=KSс, Pп=KSп ,
где Sс,
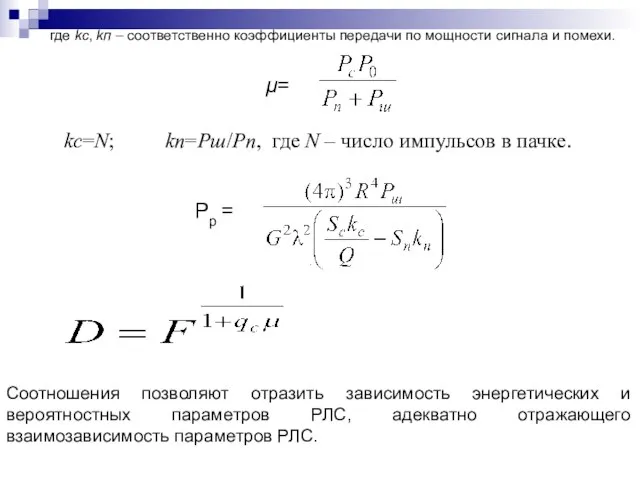
где kс, kп – соответственно коэффициенты передачи по мощности сигнала и
где kс, kп – соответственно коэффициенты передачи по мощности сигнала и

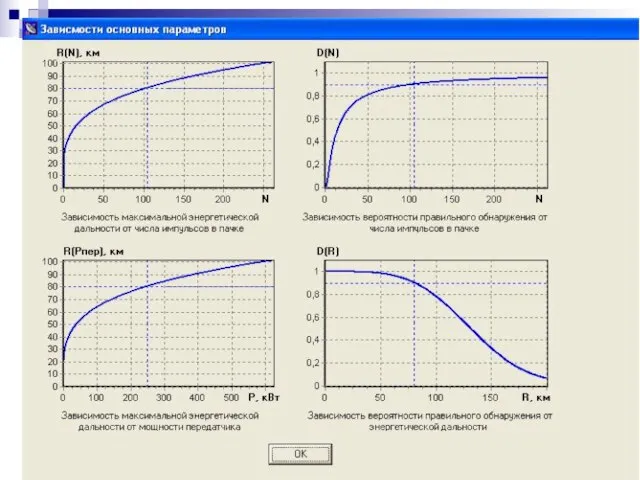
1 – при действии пассивных помех;
2- при применении методов режекции пассивных
1 – при действии пассивных помех;
2- при применении методов режекции пассивных
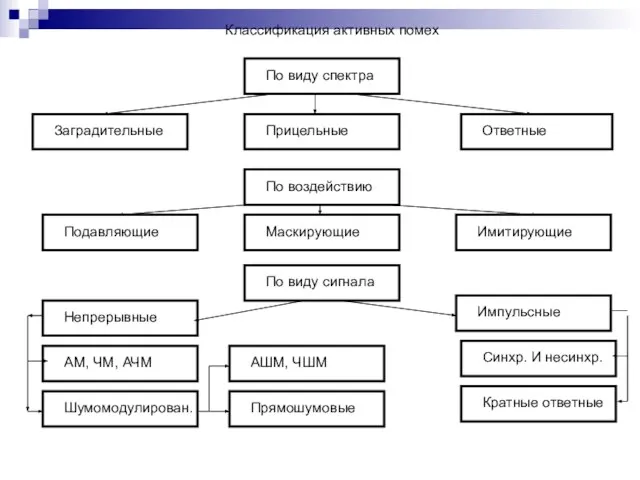
Классификация активных помех
Классификация активных помех
 Техническая эксплуатация и ремонт теплообменника жесткой конструкции типа ТН, на установке УПН
Техническая эксплуатация и ремонт теплообменника жесткой конструкции типа ТН, на установке УПН Діелектрики та провідники в електричному полі
Діелектрики та провідники в електричному полі Кинематика вращательного движения
Кинематика вращательного движения Магнит. Магнит өріс бағыты
Магнит. Магнит өріс бағыты Педагог: Васильева М.В. МОУ КСОШ №13 8 класс 2009 год «Сила трения. Трение в природе, быту и технике.» Цель урока: сформировать понятие с
Педагог: Васильева М.В. МОУ КСОШ №13 8 класс 2009 год «Сила трения. Трение в природе, быту и технике.» Цель урока: сформировать понятие с Плотность воды
Плотность воды Ременные передачи
Ременные передачи Давление газов и жидкостей. Решение задач
Давление газов и жидкостей. Решение задач Основы массообмена
Основы массообмена Измерение сопротивления проводника при помощи амперметра и вольтметра
Измерение сопротивления проводника при помощи амперметра и вольтметра Водородоподобный атом. Орбитальный и собственный моменты импульса электрона и описание различных состояний электрона в атоме
Водородоподобный атом. Орбитальный и собственный моменты импульса электрона и описание различных состояний электрона в атоме Электрмагнит өрісі
Электрмагнит өрісі Почему в морской воде плавать легче, чем в пресной?
Почему в морской воде плавать легче, чем в пресной? Жылу алмасу үдерістері
Жылу алмасу үдерістері Теория линейных электрических цепей
Теория линейных электрических цепей Современные методы разделения и концентрирования в химическом анализе. (Лекция 1)
Современные методы разделения и концентрирования в химическом анализе. (Лекция 1) Энтропия и ее изменение
Энтропия и ее изменение Кинематика
Кинематика Колокол дремавший… (колокол как источник звуковых волн)
Колокол дремавший… (колокол как источник звуковых волн) Векторный анализ и синтез сигналов. Программа “Вектор”
Векторный анализ и синтез сигналов. Программа “Вектор” Техническая эксплуатация. Жизненный цикл РЭО
Техническая эксплуатация. Жизненный цикл РЭО Курс физики
Курс физики Влияние электромагнитных волн на организм человека Выполнила: Зенина Дарья
Влияние электромагнитных волн на организм человека Выполнила: Зенина Дарья Геофизические исследования скважин. (Лекция 11)
Геофизические исследования скважин. (Лекция 11) Совершенствование организации и технологии ремонта МТП в условиях ОАО Птицефабрика Атемарская
Совершенствование организации и технологии ремонта МТП в условиях ОАО Птицефабрика Атемарская Законы Ньютона
Законы Ньютона Гидродинамика. Уравнение Бернулли. Подъемная сила. Течение вязкой жидкости. Формула Стокса. Обтекание тел
Гидродинамика. Уравнение Бернулли. Подъемная сила. Течение вязкой жидкости. Формула Стокса. Обтекание тел Лекция №5 (5). Электромагнитные поля элементарных источников
Лекция №5 (5). Электромагнитные поля элементарных источников