- Основные понятия механики

Содержание
- 2. 1. ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ Механика делится на три раздела: 1) кинематику; 2) динамику; 3) статику. Кинематика
- 3. Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей
- 4. Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - такое,
- 5. При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется
- 6. Для характеристики движения материальной точки вводится векторная величина - скорость, которая определяет как быстроту движения, так
- 7. Пример Половину времени тело двигалось со скоростью V1, а вторую половину – со скоростью V2. Какова
- 8. При неограниченном уменьшении Δ t средняя скорость стремится к предельному значению, которое называется мгновенной скоростью По
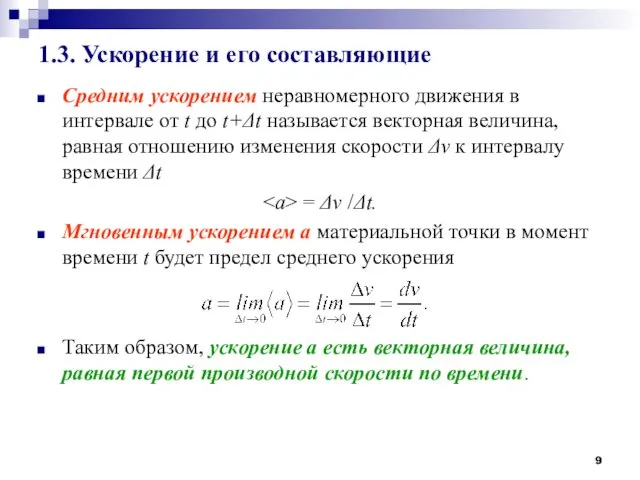
- 9. 1.3. Ускорение и его составляющие Средним ускорением неравномерного движения в интервале от t до t+Δt называется
- 10. Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих: Тангенциальная составляющая ускорения равна первой производной
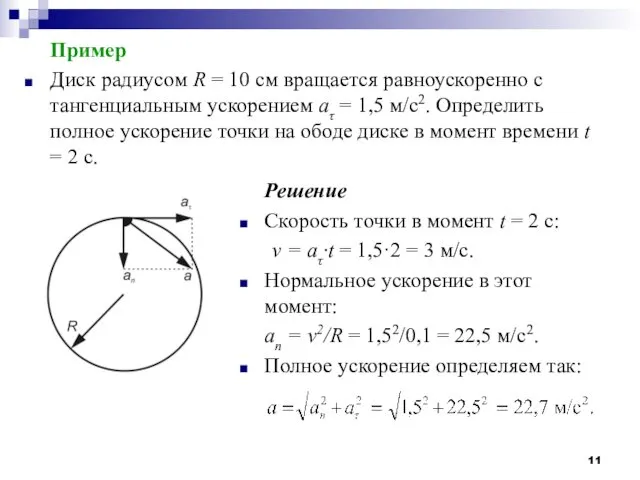
- 11. Пример Диск радиусом R = 10 см вращается равноускоренно с тангенциальным ускорением aτ = 1,5 м/с2.
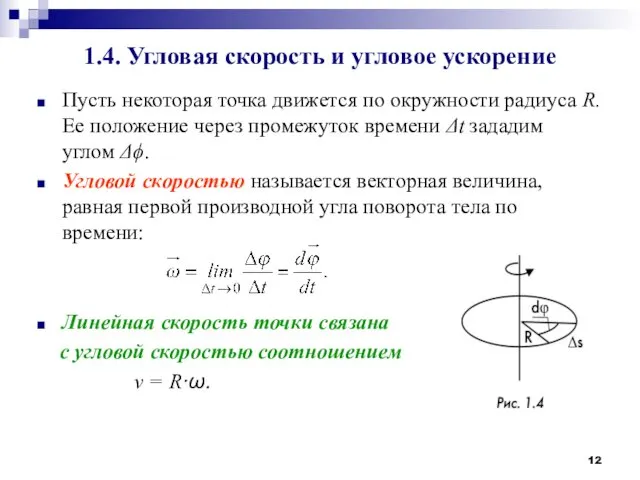
- 12. 1.4. Угловая скорость и угловое ускорение Пусть некоторая точка движется по окружности радиуса R. Ее положение
- 13. Если ω = const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем,
- 14. Тангенциальная составляющая ускорения aτ = dv/dt = d(ω·R)/dt =R·dω/dt = R·ε. Нормальная составляющая ускорения Связь между
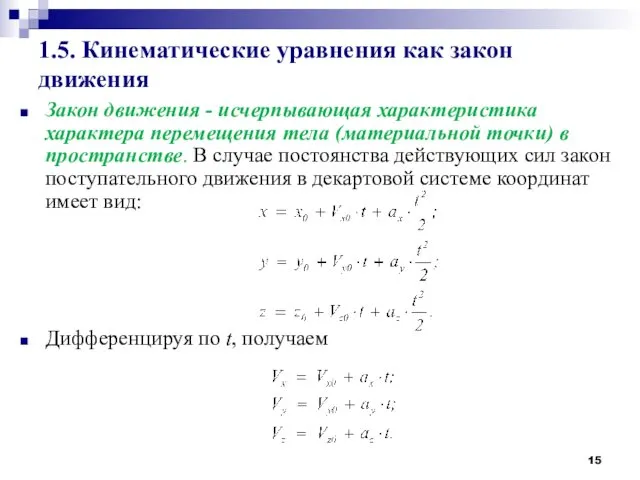
- 15. 1.5. Кинематические уравнения как закон движения Закон движения - исчерпывающая характеристика характера перемещения тела (материальной точки)
- 16. Повторное дифференцирование приводит к выражениям Выполняя указанные действия в обратном порядке (интегрируя составляющие ускорения), можно получить
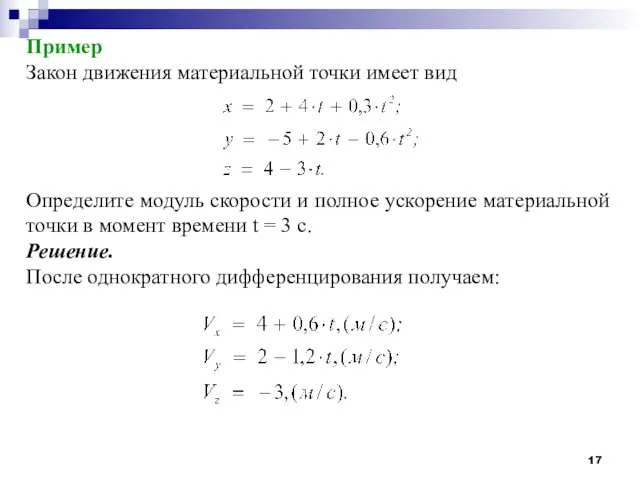
- 17. Пример Закон движения материальной точки имеет вид Определите модуль скорости и полное ускорение материальной точки в
- 18. Еще раз дифференцируем: Решения для модуля скорости и полного ускорения при t = 3 c имеют
- 19. 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 2.1. Первый закон Ньютона. Масса. Сила Всякая
- 20. Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы. Сила - это векторная величина,
- 21. Учитывая, что масса материальной точки в классической механике есть величина постоянная, ее можно внести под знак
- 22. Если самолет совершает равномерный прямолинейный горизонтальный полет, то сила тяжести полностью уравновешивается подъемной силой (сумма сил
- 23. Пример С башни брошен камень в горизонтальном направлении с начальной скоростью 40 м/с. Какова скорость камня
- 24. Вдоль оси OY вниз действует сила тяжести FT = mg, поэтому ускорение вдоль этой оси по
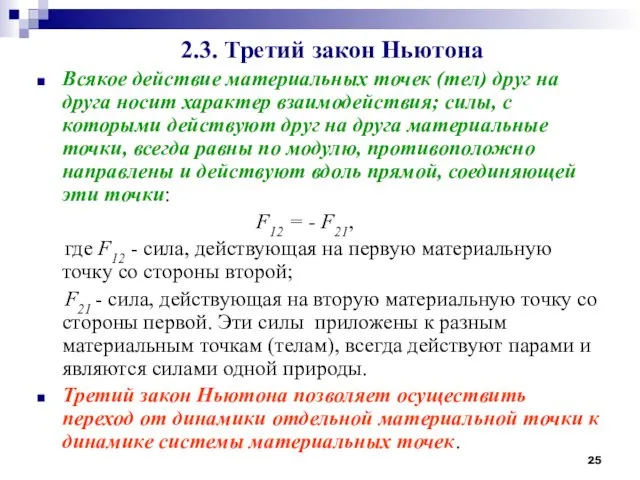
- 25. 2.3. Третий закон Ньютона Всякое действие материальных точек (тел) друг на друга носит характер взаимодействия; силы,
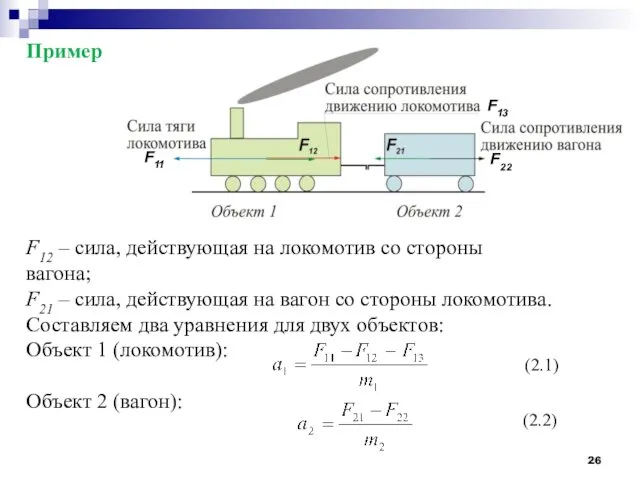
- 26. Пример F12 – сила, действующая на локомотив со стороны вагона; F21 – сила, действующая на вагон
- 27. При определении сил в сцепке (F12 и F21) учтем, что они равны по величине (по третьему
- 29. Скачать презентацию
1. ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ
Механика делится на три раздела:
1) кинематику;
1. ОСНОВНЫЕ ПОНЯТИЯ МЕХАНИКИ
Механика делится на три раздела:
1) кинематику;
Механика для описания движения тел в зависимости от условий конкретных задач
Механика для описания движения тел в зависимости от условий конкретных задач
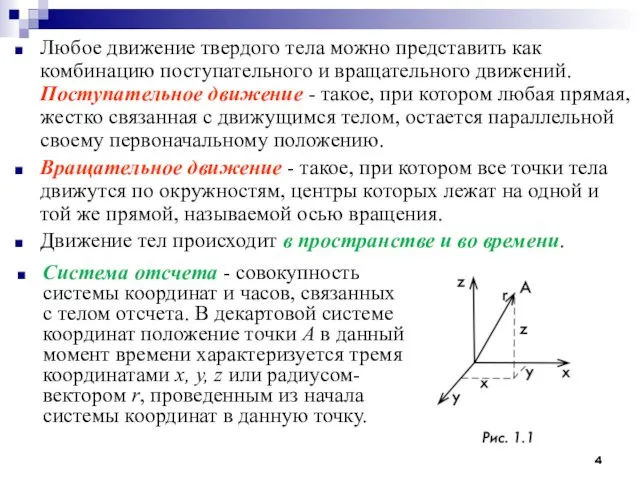
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного
При движении материальной точки ее координаты с течением времени изменяются. В
При движении материальной точки ее координаты с течением времени изменяются. В
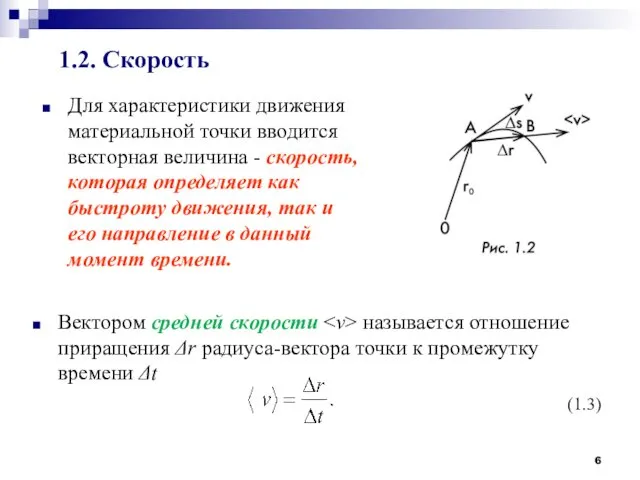
Для характеристики движения материальной точки вводится векторная величина - скорость, которая
Для характеристики движения материальной точки вводится векторная величина - скорость, которая
Пример
Половину времени тело двигалось со скоростью V1, а вторую половину
Пример
Половину времени тело двигалось со скоростью V1, а вторую половину
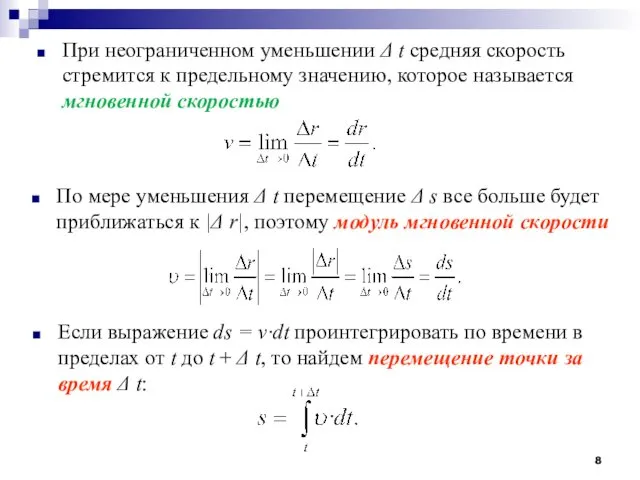
При неограниченном уменьшении Δ t средняя скорость стремится к предельному значению,
При неограниченном уменьшении Δ t средняя скорость стремится к предельному значению,
1.3. Ускорение и его составляющие
Средним ускорением неравномерного движения в интервале от
1.3. Ускорение и его составляющие
Средним ускорением неравномерного движения в интервале от
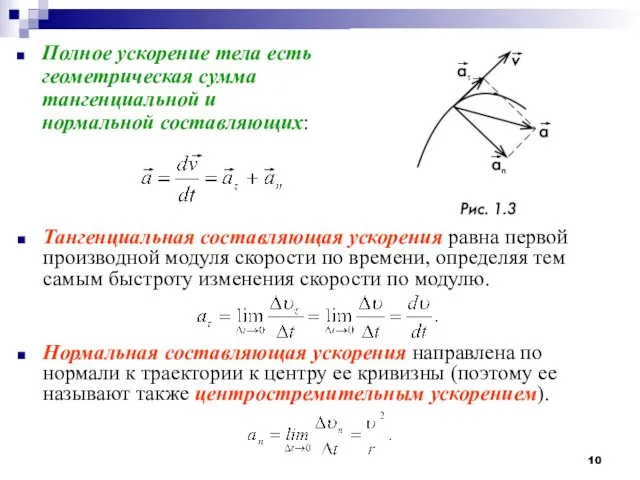
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих:
Тангенциальная
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих:
Тангенциальная
Пример
Диск радиусом R = 10 см вращается равноускоренно с тангенциальным ускорением
Пример
Диск радиусом R = 10 см вращается равноускоренно с тангенциальным ускорением
1.4. Угловая скорость и угловое ускорение
Пусть некоторая точка движется по окружности
1.4. Угловая скорость и угловое ускорение
Пусть некоторая точка движется по окружности
Если ω = const, то вращение равномерное и его можно характеризовать
Если ω = const, то вращение равномерное и его можно характеризовать
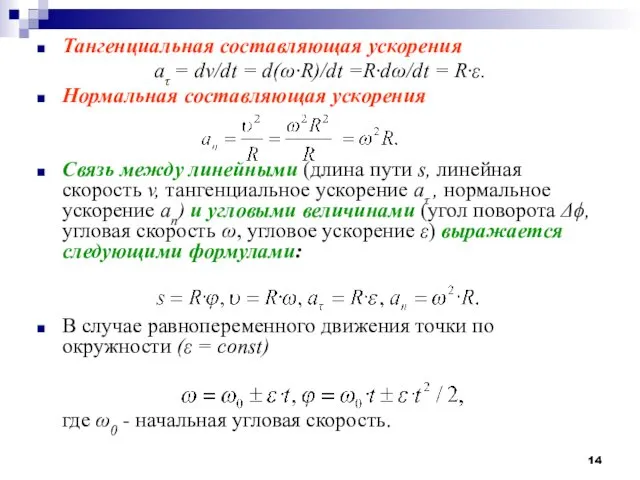
Тангенциальная составляющая ускорения
aτ = dv/dt = d(ω·R)/dt =R·dω/dt = R·ε.
Нормальная составляющая
Тангенциальная составляющая ускорения
aτ = dv/dt = d(ω·R)/dt =R·dω/dt = R·ε.
Нормальная составляющая
1.5. Кинематические уравнения как закон движения
Закон движения - исчерпывающая характеристика характера
1.5. Кинематические уравнения как закон движения
Закон движения - исчерпывающая характеристика характера
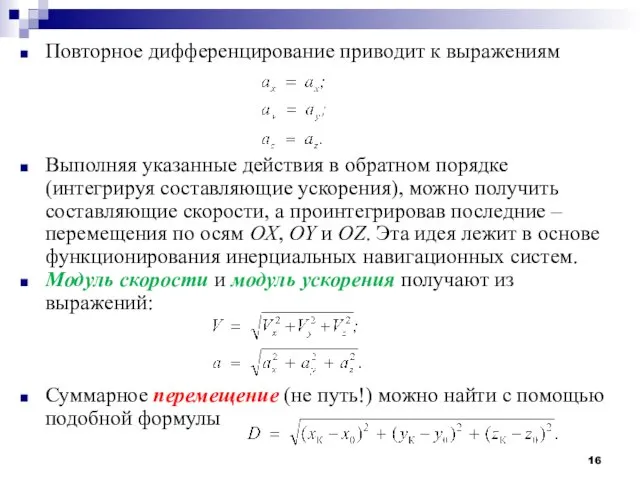
Повторное дифференцирование приводит к выражениям
Выполняя указанные действия в обратном порядке (интегрируя
Повторное дифференцирование приводит к выражениям
Выполняя указанные действия в обратном порядке (интегрируя
Пример
Закон движения материальной точки имеет вид
Определите модуль скорости и полное ускорение
Пример
Закон движения материальной точки имеет вид
Определите модуль скорости и полное ускорение
Еще раз дифференцируем:
Решения для модуля скорости и полного ускорения при t
Еще раз дифференцируем:
Решения для модуля скорости и полного ускорения при t
2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
2.1. Первый закон
2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 2.1. Первый закон
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы.
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы.
Учитывая, что масса материальной точки в классической механике есть величина постоянная,
Учитывая, что масса материальной точки в классической механике есть величина постоянная,
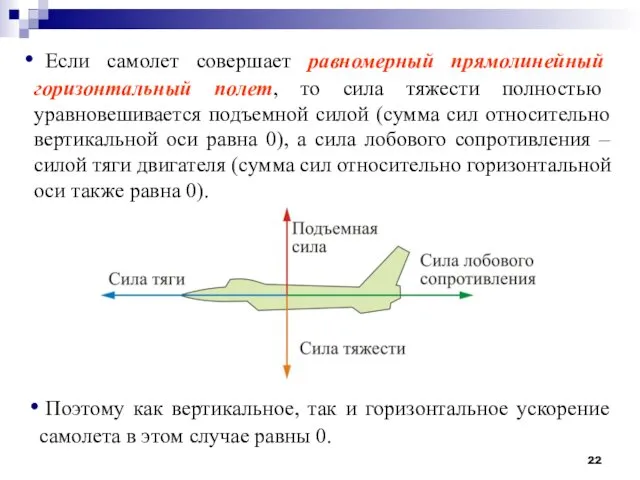
Если самолет совершает равномерный прямолинейный горизонтальный полет, то сила тяжести
Если самолет совершает равномерный прямолинейный горизонтальный полет, то сила тяжести
Пример
С башни брошен камень в горизонтальном направлении с начальной скоростью 40
Пример
С башни брошен камень в горизонтальном направлении с начальной скоростью 40
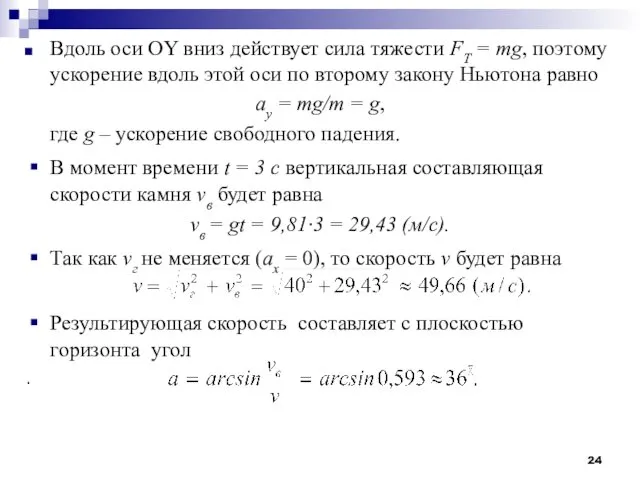
Вдоль оси OY вниз действует сила тяжести FT = mg, поэтому
Вдоль оси OY вниз действует сила тяжести FT = mg, поэтому
2.3. Третий закон Ньютона
Всякое действие материальных точек (тел) друг на друга
2.3. Третий закон Ньютона
Всякое действие материальных точек (тел) друг на друга
Пример
F12 – сила, действующая на локомотив со стороны
вагона;
F21 –
Пример
F12 – сила, действующая на локомотив со стороны
вагона;
F21 –
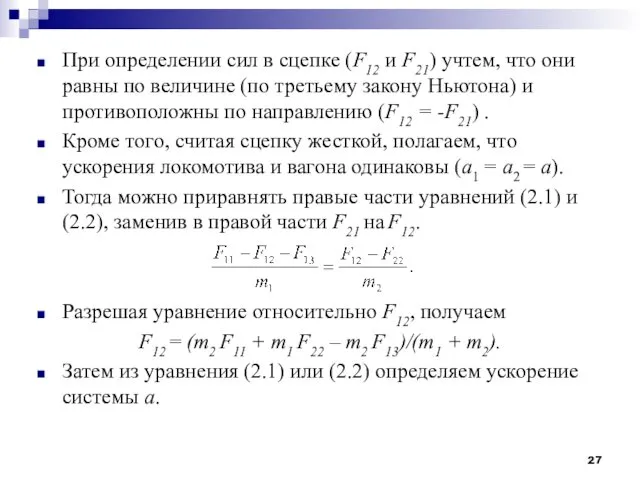
При определении сил в сцепке (F12 и F21) учтем, что они
При определении сил в сцепке (F12 и F21) учтем, что они
 Свет в нашей жизни
Свет в нашей жизни Элементы квантовой физики. Гипотеза Планка
Элементы квантовой физики. Гипотеза Планка Условия равновесия тел. Момент силы. Виды равновесия
Условия равновесия тел. Момент силы. Виды равновесия Применение законов сохранения импульса и энергии
Применение законов сохранения импульса и энергии Электромагнитная индукция. Опыты Фарадея Подготовка к ГИА
Электромагнитная индукция. Опыты Фарадея Подготовка к ГИА Основные понятия ТММ
Основные понятия ТММ Лабораторные работы
Лабораторные работы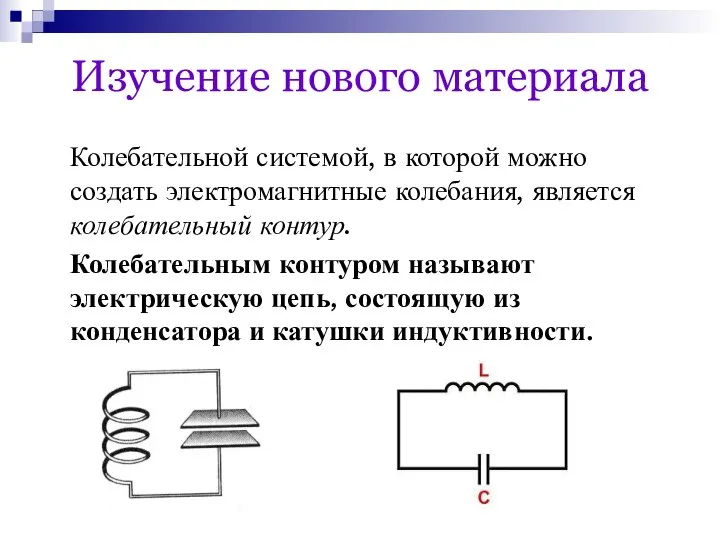 Колебательный контур
Колебательный контур Картография. Геодезические сети и датумы
Картография. Геодезические сети и датумы Презентация по физике СИЛА ТЯЖЕСТИ Силы в механике 7 класс
Презентация по физике СИЛА ТЯЖЕСТИ Силы в механике 7 класс  Спектр атома водорода. (Лекция 7а)
Спектр атома водорода. (Лекция 7а) Радиоактивные превращения атомных ядер
Радиоактивные превращения атомных ядер Геометрическая оптика
Геометрическая оптика Термодинамиканың 2-заңы
Термодинамиканың 2-заңы Явления тяготения. Сила тяжести
Явления тяготения. Сила тяжести Импульс тела. Закон сохранения импульса. Реактивное движение в природе и технике
Импульс тела. Закон сохранения импульса. Реактивное движение в природе и технике Ультрафиолетовая катастрофа. Озоновые дыры
Ультрафиолетовая катастрофа. Озоновые дыры Сравнение количеств теплоты при смешивании воды разной температуры. Лабораторная работа №1
Сравнение количеств теплоты при смешивании воды разной температуры. Лабораторная работа №1 Свойства водяного пара. Основные понятия и определения
Свойства водяного пара. Основные понятия и определения Личности в истории науки и техники Автор: Акимцева Александра Семеновна Средне-Лопатинская ООШ
Личности в истории науки и техники Автор: Акимцева Александра Семеновна Средне-Лопатинская ООШ  7ф урок 1
7ф урок 1 Формирование и первичная обработка видеосигналов
Формирование и первичная обработка видеосигналов Механические колебания
Механические колебания Явище поляризація світла. Оптична активність речовин
Явище поляризація світла. Оптична активність речовин Солнечные лучи. Разница между светлыми и тёмными цветами
Солнечные лучи. Разница между светлыми и тёмными цветами Секреты механики. Комплект дидактических материалов
Секреты механики. Комплект дидактических материалов Математический аппарат квантовой механики (теория линейных, эрмитовых операторов)
Математический аппарат квантовой механики (теория линейных, эрмитовых операторов) Молекулярная физика
Молекулярная физика