- Пара сил. (Лекция 3)

Содержание
- 2. 2.4. Пара сил. Определение. Система из 2 равных по величине и противоположных по направлению сил, действующих
- 3. Свойства: Проекция пары сил на любую координатную ось равна 0. Алгебраическим (векторным) моментом пары сил называется
- 4. Следствие. Любую совокупность пар сил можно заменить одной парой сил. Замечание. Пара сил задается не при
- 5. 3. Статика Статика изучает равновесие тел.
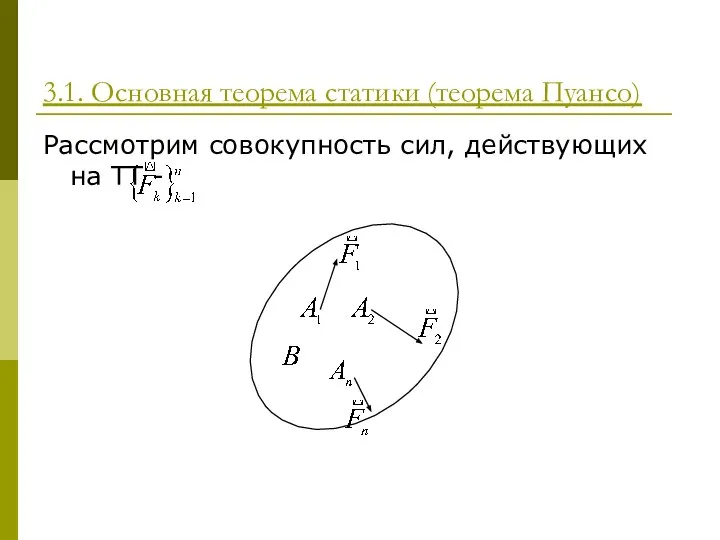
- 6. 3.1. Основная теорема статики (теорема Пуансо) Рассмотрим совокупность сил, действующих на ТТ -
- 7. Определение. Главным вектором системы сил называют вектор , который приложен в центре приведения. Определение. Главным моментом
- 8. Основная теорема статики. Любую систему сил, действующих на одно твердое тело, можно заменить на эквивалентную ей
- 9. 3.2. Условие равновесия системы сил (уравнения равновесия) Определение. Система сил находится в равновесии, если выполнено условие:
- 10. Плоская система сил:
- 11. 3.6. Внешние и внутренние силы. Определение. Сила взаимодействия между точками, входящими в одну механическую систему, называются
- 12. Свойства: 1. Главный вектор внутренних сил равен 0. 2. Главный момент внутренних сил равен 0.
- 13. 4. Динамика механических систем. 4.1. Основные теоремы динамики Теорема 1 (об изменении количества движения механической системы).
- 14. Определение. Количеством движения МТ называется вектор МТ, равный . Определение. Количеством движения МС называется свободный вектор,
- 15. Определение. Полным импульсом внешних сил называется выражение: . - интегральная форма записи Изменение количества движения механической
- 16. Законы сохранения: Если . Если . Если
- 17. Теорема 2 (о движении центра масс). Центр масс хоть и является геометрической точкой, но движется по
- 18. Определение. Центром масс называется геометрическая точка, радиус-вектор которой определяется согласно формуле:
- 19. Если движение задано в декартовой прямоугольной системе координат, то координаты центра масс определяются по формуле:
- 20. Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают изменение внешних сил, которые в
- 21. Теорема об изменении кинетического момента МС Скорость изменения кинетического момента механической системы относительно какой-либо точки равна
- 22. Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
- 23. Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения данной точки, вычисленный относительно точки
- 24. Определение. Моментом инерции механической системы относительно т. О называют величину, равную . Определение. Моментом инерции механической
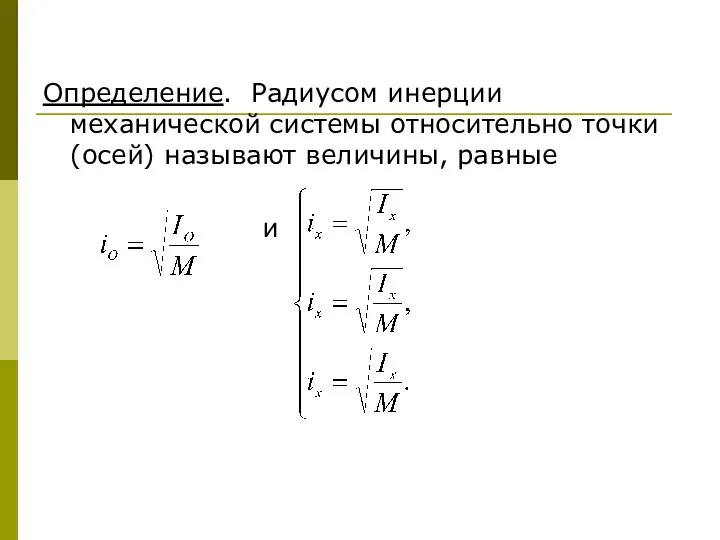
- 25. Определение. Радиусом инерции механической системы относительно точки (осей) называют величины, равные и
- 27. Скачать презентацию
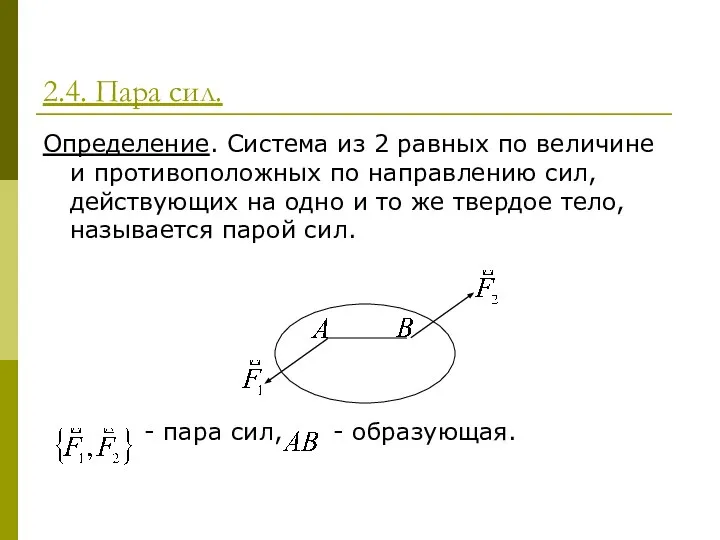
2.4. Пара сил.
Определение. Система из 2 равных по величине и противоположных
2.4. Пара сил.
Определение. Система из 2 равных по величине и противоположных
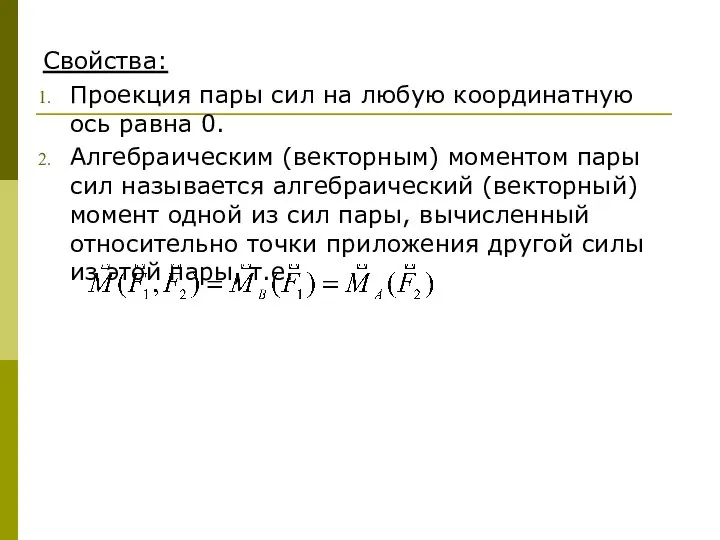
Свойства:
Проекция пары сил на любую координатную ось равна 0.
Алгебраическим (векторным) моментом
Свойства:
Проекция пары сил на любую координатную ось равна 0.
Алгебраическим (векторным) моментом
Следствие. Любую совокупность пар сил можно заменить одной парой сил.
Замечание. Пара
Следствие. Любую совокупность пар сил можно заменить одной парой сил.
Замечание. Пара
3. Статика
Статика изучает равновесие тел.
3. Статика
Статика изучает равновесие тел.
3.1. Основная теорема статики (теорема Пуансо)
Рассмотрим совокупность сил, действующих на ТТ
3.1. Основная теорема статики (теорема Пуансо)
Рассмотрим совокупность сил, действующих на ТТ
Определение. Главным вектором системы сил называют вектор , который приложен в
Основная теорема статики. Любую систему сил, действующих на одно твердое тело,
3.2. Условие равновесия системы сил (уравнения равновесия)
Определение. Система сил находится в
3.2. Условие равновесия системы сил (уравнения равновесия)
Определение. Система сил находится в
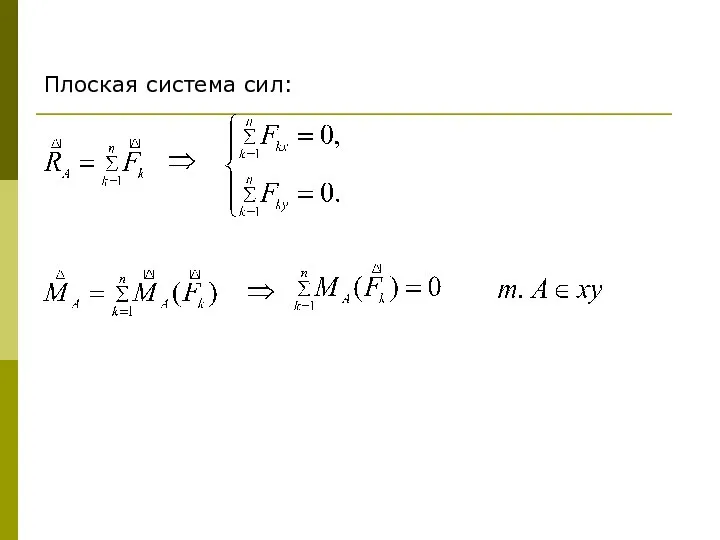
Плоская система сил:
3.6. Внешние и внутренние силы.
Определение. Сила взаимодействия между точками, входящими в
3.6. Внешние и внутренние силы.
Определение. Сила взаимодействия между точками, входящими в
Свойства:
1. Главный вектор внутренних сил равен 0.
2. Главный момент внутренних сил
1. Главный вектор внутренних сил равен 0.
2. Главный момент внутренних сил
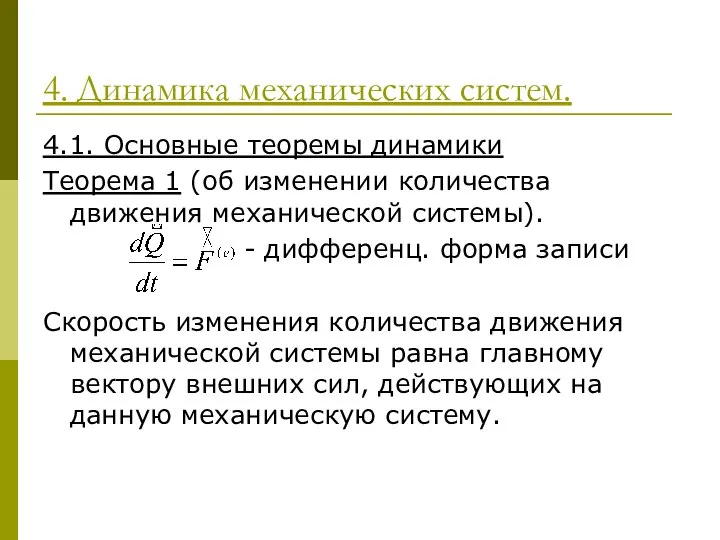
4. Динамика механических систем.
4.1. Основные теоремы динамики
Теорема 1 (об изменении количества
4. Динамика механических систем.
4.1. Основные теоремы динамики
Теорема 1 (об изменении количества
Определение. Количеством движения МТ называется вектор МТ, равный .
Определение. Количеством движения
Определение. Количеством движения МТ называется вектор МТ, равный .
Определение. Количеством движения
Определение. Полным импульсом внешних сил
называется выражение: .
- интегральная форма
Определение. Полным импульсом внешних сил
называется выражение: .
- интегральная форма
Законы сохранения:
Если .
Если .
Если
Законы сохранения:
Если .
Если .
Если
Теорема 2 (о движении центра масс).
Центр масс хоть и является геометрической
Теорема 2 (о движении центра масс).
Центр масс хоть и является геометрической

Определение. Центром масс называется геометрическая точка, радиус-вектор которой определяется согласно формуле:
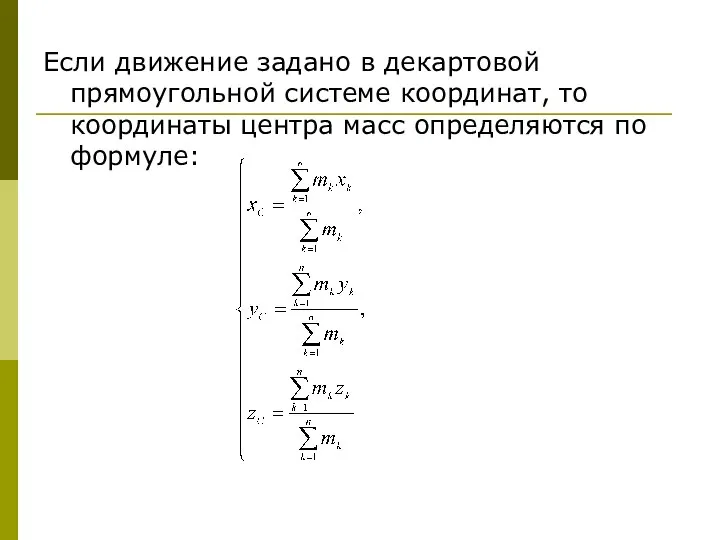
Если движение задано в декартовой прямоугольной системе координат, то координаты центра
Если движение задано в декартовой прямоугольной системе координат, то координаты центра
Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают
Замечание: хотя внутренние силы явно в формуле не участвуют, они вызывают

Теорема об изменении кинетического момента МС
Скорость изменения кинетического момента механической системы
Скорость изменения кинетического момента механической системы
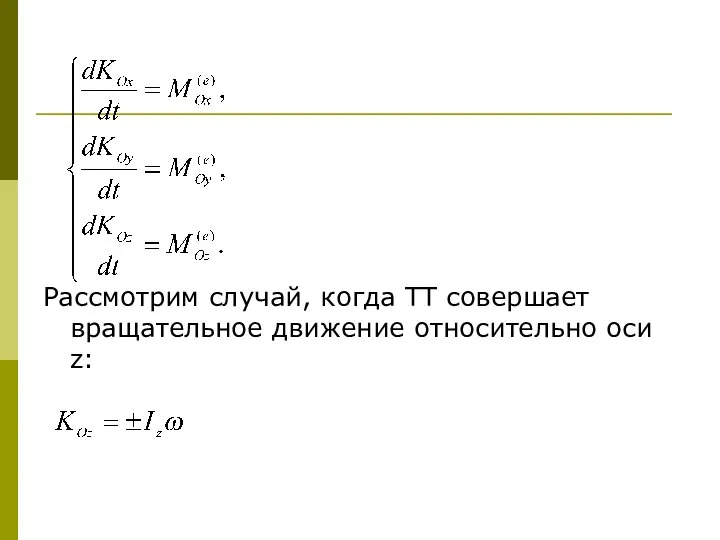
Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
Рассмотрим случай, когда ТТ совершает вращательное движение относительно оси z:
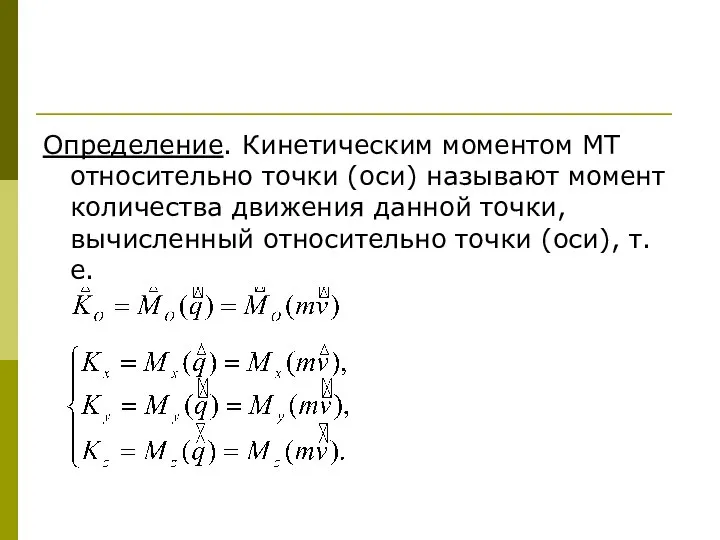
Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения
Определение. Кинетическим моментом МТ относительно точки (оси) называют момент количества движения
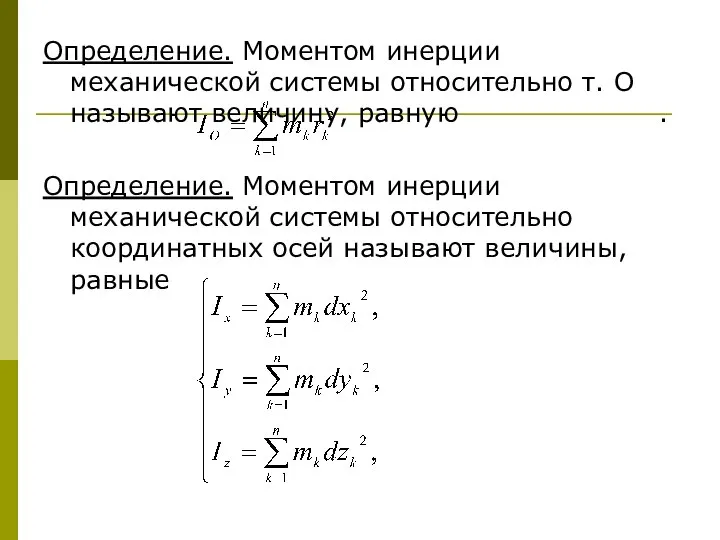
Определение. Моментом инерции механической системы относительно т. О называют величину, равную
Определение. Моментом инерции механической системы относительно т. О называют величину, равную
 Электроразведочные методы на этапах поиска и оценки рудных месторождений
Электроразведочные методы на этапах поиска и оценки рудных месторождений Основные свойства атомных ядер. Масса и энергия связи ядра
Основные свойства атомных ядер. Масса и энергия связи ядра Динамика вращательного движения. Момент силы
Динамика вращательного движения. Момент силы Атмосферное давление Цель урока: сформировать представление об атмосферном давлении и закономерностях его изменения Научитьс
Атмосферное давление Цель урока: сформировать представление об атмосферном давлении и закономерностях его изменения Научитьс Почему радуга разноцветная
Почему радуга разноцветная Зависимость силы тока от напряжения. Электрическое сопротивление
Зависимость силы тока от напряжения. Электрическое сопротивление Основные Законы Природы
Основные Законы Природы Решение задач. Закон всемирного тяготения
Решение задач. Закон всемирного тяготения «Вес воздуха. Атмосферное давление». Цель урока: 1. Рассмотреть причины, создающие атмосферное давление. 2. Экспериментально док
«Вес воздуха. Атмосферное давление». Цель урока: 1. Рассмотреть причины, создающие атмосферное давление. 2. Экспериментально док Шина Can, управления электрическими устройствами автомобиля
Шина Can, управления электрическими устройствами автомобиля Загадка Роберта Вуда (спектры и спектральный анализ)
Загадка Роберта Вуда (спектры и спектральный анализ) Свойства твёрдых тел, жидкостей и газов
Свойства твёрдых тел, жидкостей и газов Люминесценция биологических объектов
Люминесценция биологических объектов Типовой расчет №3. Молекулярная физика и термодинамика
Типовой расчет №3. Молекулярная физика и термодинамика Катушка Тесла
Катушка Тесла Гигрометр. Виды гигрометров
Гигрометр. Виды гигрометров Радиотолқындар. Радиотолқындар мен инфрақызыл сәулелердің
Радиотолқындар. Радиотолқындар мен инфрақызыл сәулелердің Назначение и общее устройство трактора Беларус1221
Назначение и общее устройство трактора Беларус1221 Механические свойства металлов
Механические свойства металлов История ракетостроения
История ракетостроения Решение экзаменационных задач по МОАНИ
Решение экзаменационных задач по МОАНИ Исследовательская работа по теме: «Фруктовые и овощные батарейки».
Исследовательская работа по теме: «Фруктовые и овощные батарейки». Формулы расчёта оптической силы интраокулярных линз
Формулы расчёта оптической силы интраокулярных линз Общая энергетика. Теория теплообмена. Теплопроводность
Общая энергетика. Теория теплообмена. Теплопроводность Москаленко Анна 10-М
Москаленко Анна 10-М  Насыщенный пар. Влажность воздуха
Насыщенный пар. Влажность воздуха Поляризация
Поляризация  Законы сохранения в механике
Законы сохранения в механике