- Регуляторы для движения по границе черного и белого в TRIK Studio

Содержание
- 2. План занятия Регуляторы Ветвление Задача движения по границе Значение серого Релейные регуляторы Двухпозиционный регулятор Калибровка датчика
- 3. Регулятор Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы. Поплавковый регулятор Ползунова, 1765 г. Центробежный
- 4. Ветвление Ветвление – часть алгоритма, в которой в зависимости от условия выполняется один или другой набор
- 5. Движение вдоль границы черного и белого Задача двигаться по границе черного и белого с помощью датчика
- 6. Тележка с одним датчиком освещенности 1 B C
- 7. Двухпозиционный релейный регулятор Двухпозиционный релейный регулятор имеет два состояния: освещенность > серого, освещенность ≤ серого. Двухпозиционный
- 8. Релейный регулятор: движение вдоль границы черного и белого Движение на релейном регуляторе слишком неровное: робота заносит
- 9. Трехпозиционный релейный регулятор Рассмотрим окрестность вокруг значения серого ±5 процентов свет>30 | 30≥свет>20 | свет≤20 белый
- 10. Пропорциональный регулятор В задачах автоматического регулирования управляющее воздействие u обычно является функцией динамической ошибки – отклонения
- 11. Пропорциональный регулятор: движение по линии Также как и в релейном регуляторе, необходимо определить среднее значение grey
- 12. Пропорциональный регулятор: калибровка датчика освещенности Краткая калибровка с понижением, датчик над белым полем grey=sensor1-(white-black)/2 Полная калибровка
- 13. Пропорциональный регулятор: калибровка датчика освещенности Краткая калибровка с понижением, датчик над белым полем grey=sensor1-(white-black)/2 Полная калибровка
- 14. Движение по линии с двумя датчиками освещенности
- 15. Релейный регулятор: движение с двумя датчиками освещенности Оба на белом – движение прямо, левый (sensor1) на
- 16. Релейный четырехпозиционный регулятор: вложенное ветвление На каждой ветви проверки первого датчика идет проверка второго датчика Алгоритм
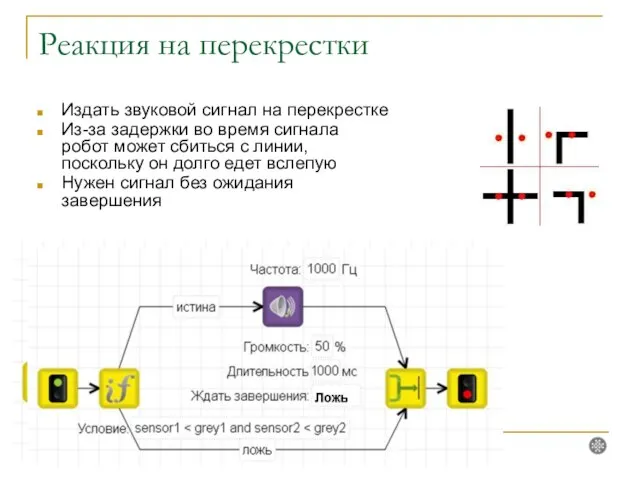
- 17. Реакция на перекрестки Издать звуковой сигнал на каждом перекрестке При звуковом сигнале без ожидания один перекресток
- 18. Калибровка с понижением для двух датчиков Краткая калибровка Откуда взято вычитаемое число? Оно определено заранее как
- 19. Реакция на перекрестки На старте обнулить счетчик перекрестков count=0 Построить цикл с условием по счетчику count
- 20. Действия на перекрестках На заданном перекрестке count==3 остановиться и издать звуковой сигнал Для наглядности создать подпрограмму
- 21. Действия на перекрестках На 5 перекрестке сбить объект (после сигнала на 3 перекрестке)
- 22. Пропорциональный регулятор: движение по линии с двумя датчиками Ошибка рассматривается как разность показаний датчиков Нет зависимости
- 23. Пропорциональный регулятор устранение статической ошибки Датчики могут быть изготовлены с отклонениями Разность показаний на однотонной поверхности
- 24. Подпрограммы Вытащите первый блок «Подпрограмма» на сцену Назовите её. Блок подпрограммы появится в палитре Двойным щелчком
- 25. Реакция на перекрестки Издать звуковой сигнал на перекрестке Из-за задержки во время сигнала робот может сбиться
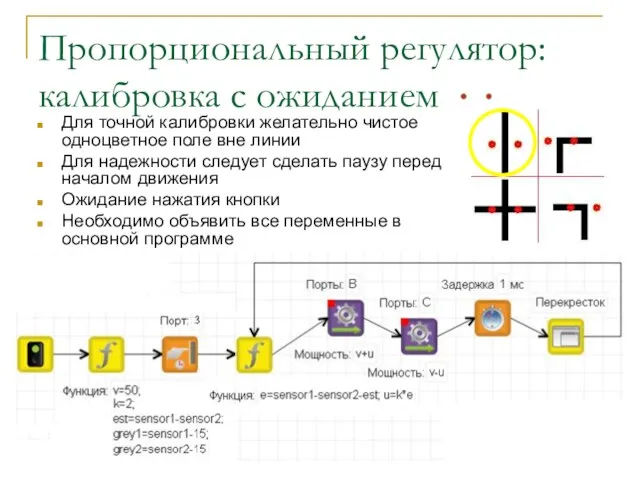
- 26. Пропорциональный регулятор: калибровка с ожиданием Для точной калибровки желательно чистое одноцветное поле вне линии Для надежности
- 27. Реакция на перекрестки Сигнал без ожидания «пиликает» постоянно… Почему? Скорость робота – примерно 30 см/с Ширина
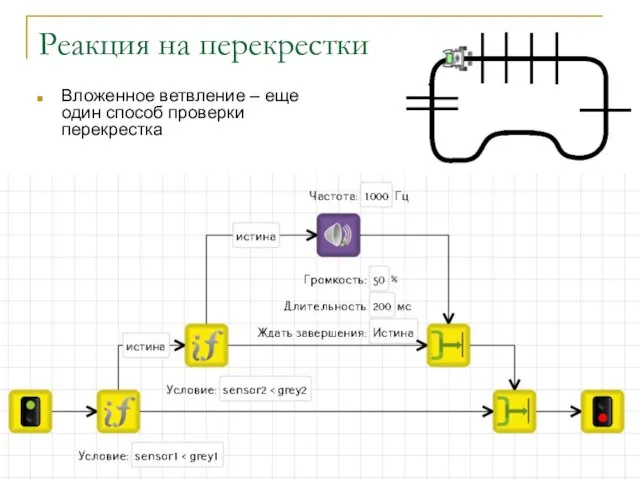
- 28. Реакция на перекрестки Вложенное ветвление – еще один способ проверки перекрестка
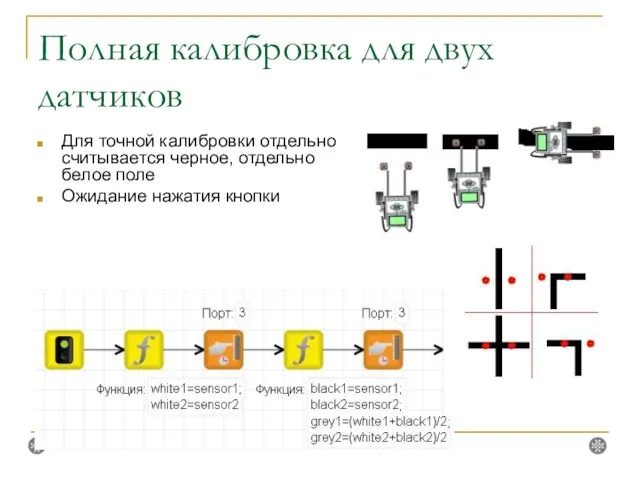
- 29. Полная калибровка для двух датчиков Для точной калибровки отдельно считывается черное, отдельно белое поле Ожидание нажатия
- 30. Подсчет перекрестков П-регулятор поместить в отдельную подпрограмму Обнуляем счетчик count и задаем все переменные до программы
- 31. Увеличение счетчика На каждом перекрестке добавляем в счетчик 1 count=count + 1
- 32. Усовершенствованный проезд перекрестка В начале запоминаем время На каждом перекрестке обновляем время Засчитываем перекресток только через
- 33. Реакция на объект Подпрограмма «Объект» сдвигает банки на каждом втором перекрестке Условие четности перекрестка: count %
- 35. Скачать презентацию
План занятия
Регуляторы
Ветвление
Задача движения по границе
Значение серого
Релейные регуляторы
Двухпозиционный регулятор
Калибровка датчика
Корректировка скорости
Трехпозиционный регулятор
План занятия
Регуляторы
Ветвление
Задача движения по границе
Значение серого
Релейные регуляторы
Двухпозиционный регулятор
Калибровка датчика
Корректировка скорости
Трехпозиционный регулятор
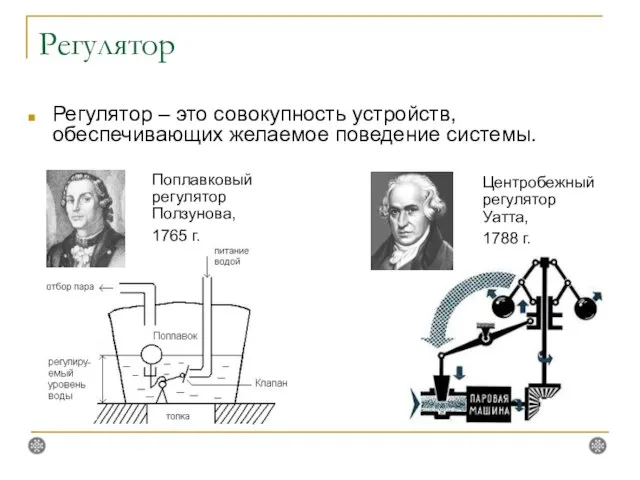
Регулятор
Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы.
Поплавковый регулятор Ползунова,
Регулятор
Регулятор – это совокупность устройств, обеспечивающих желаемое поведение системы.
Поплавковый регулятор Ползунова,
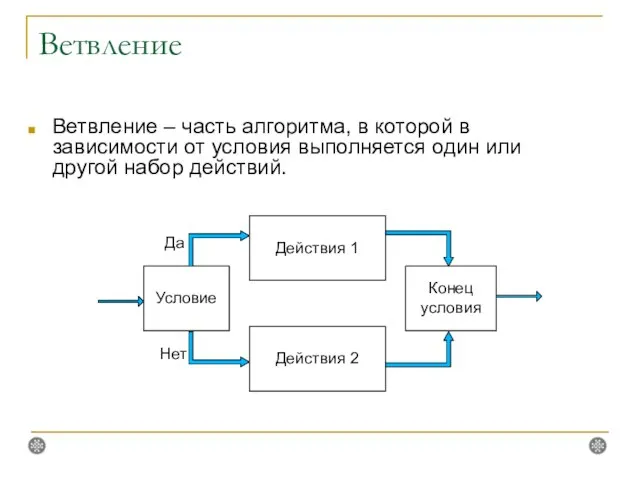
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
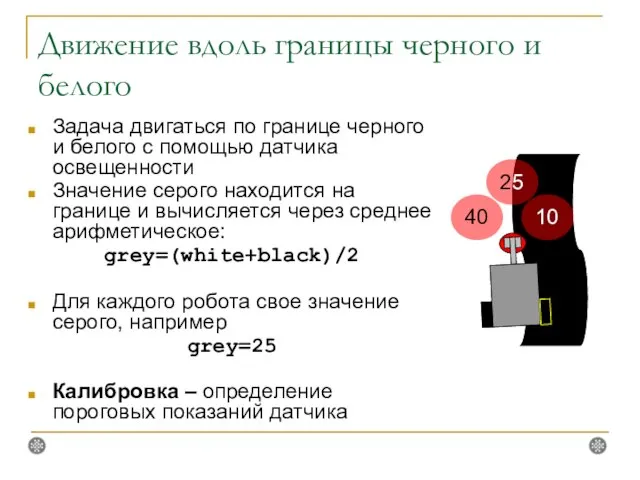
Движение вдоль границы черного и белого
Задача двигаться по границе черного и
Движение вдоль границы черного и белого
Задача двигаться по границе черного и
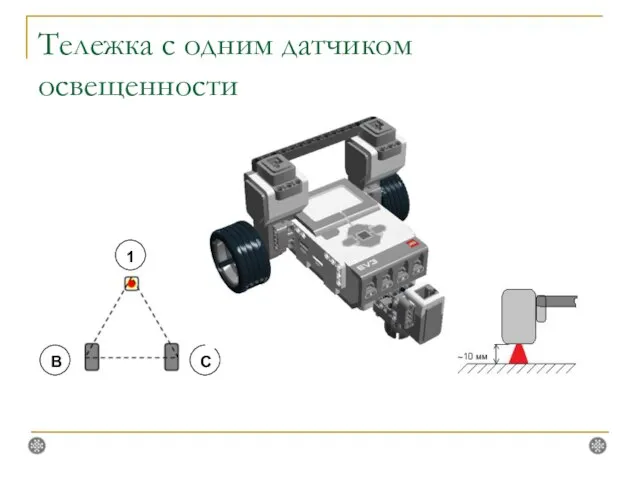
Тележка с одним датчиком освещенности
1
B
C
Тележка с одним датчиком освещенности
1
B
C

Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
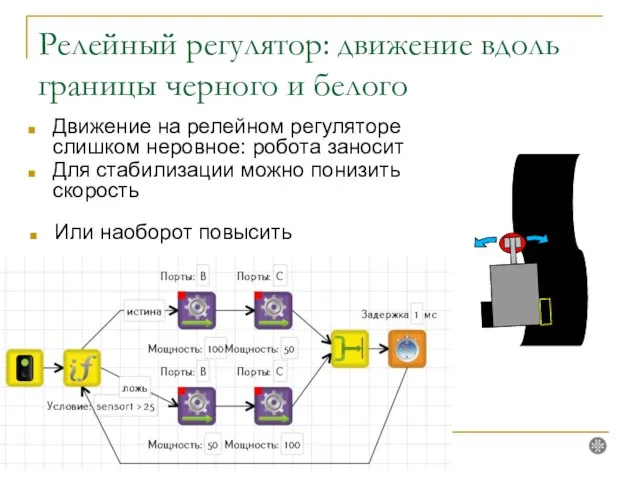
Релейный регулятор: движение вдоль границы черного и белого
Движение на релейном регуляторе
Релейный регулятор: движение вдоль границы черного и белого
Движение на релейном регуляторе
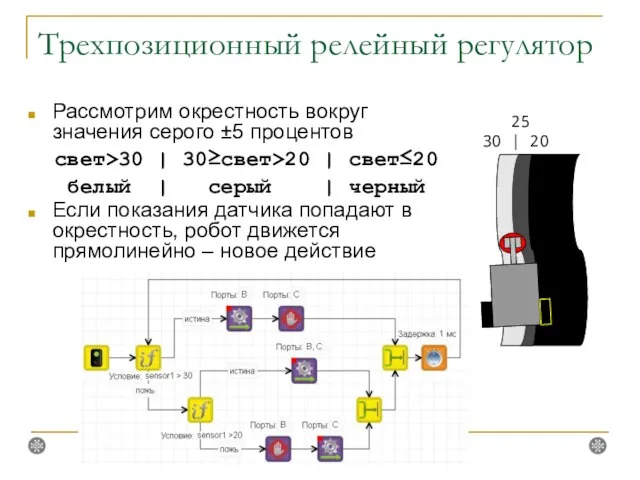
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>30 |
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>30 |
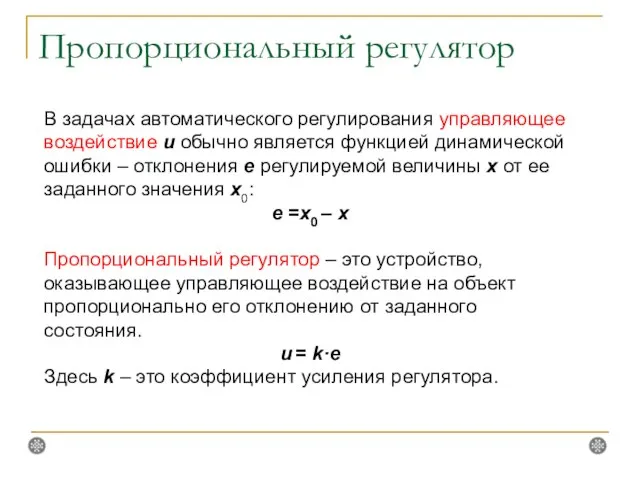
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие u обычно является функцией
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие u обычно является функцией

Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо
Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо

Пропорциональный регулятор: калибровка датчика освещенности
Краткая калибровка с понижением, датчик над белым
Пропорциональный регулятор: калибровка датчика освещенности
Краткая калибровка с понижением, датчик над белым

Пропорциональный регулятор: калибровка датчика освещенности
Краткая калибровка с понижением, датчик над белым
Пропорциональный регулятор: калибровка датчика освещенности
Краткая калибровка с понижением, датчик над белым
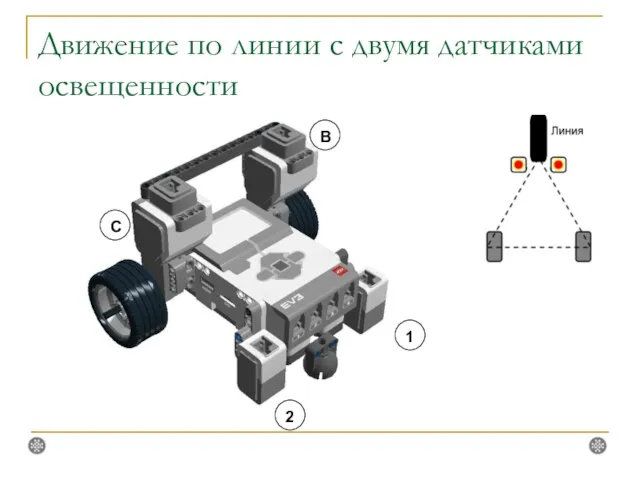
Движение по линии с двумя датчиками освещенности
Движение по линии с двумя датчиками освещенности
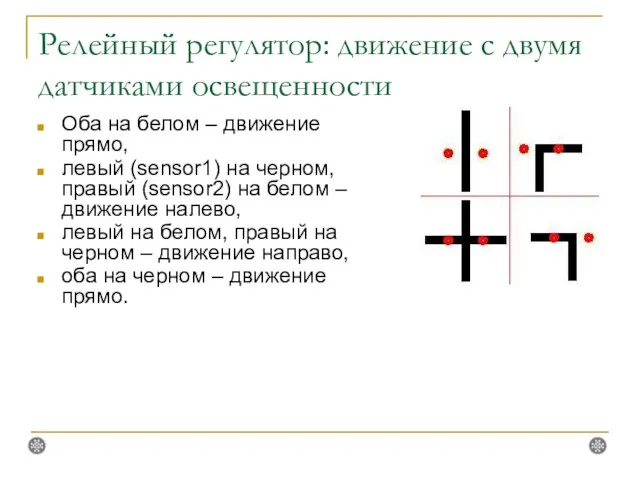
Релейный регулятор: движение с двумя датчиками освещенности
Оба на белом – движение
Релейный регулятор: движение с двумя датчиками освещенности
Оба на белом – движение
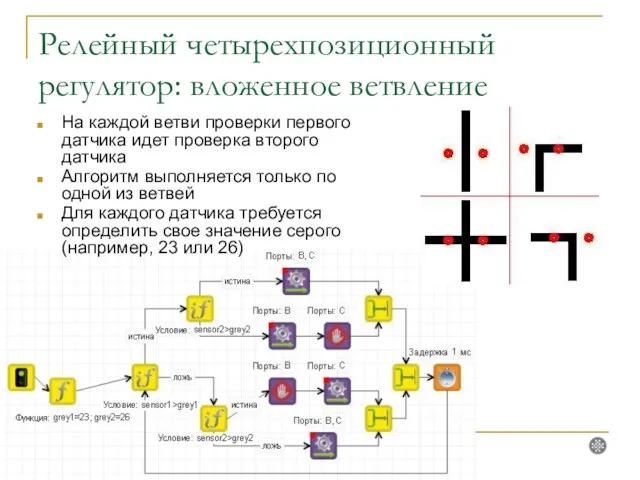
Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет
Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет

Реакция на перекрестки
Издать звуковой сигнал на каждом перекрестке
При звуковом сигнале без
Реакция на перекрестки
Издать звуковой сигнал на каждом перекрестке
При звуковом сигнале без
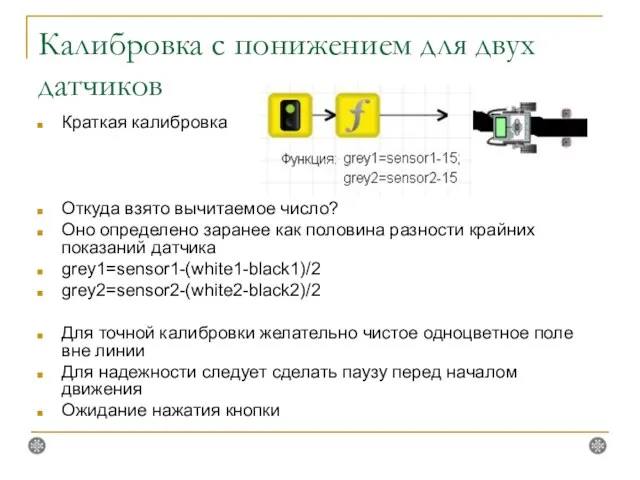
Калибровка с понижением для двух датчиков
Краткая калибровка
Откуда взято вычитаемое число?
Оно определено
Калибровка с понижением для двух датчиков
Краткая калибровка
Откуда взято вычитаемое число?
Оно определено

Реакция на перекрестки
На старте обнулить счетчик перекрестков count=0
Построить цикл с условием
Реакция на перекрестки
На старте обнулить счетчик перекрестков count=0
Построить цикл с условием
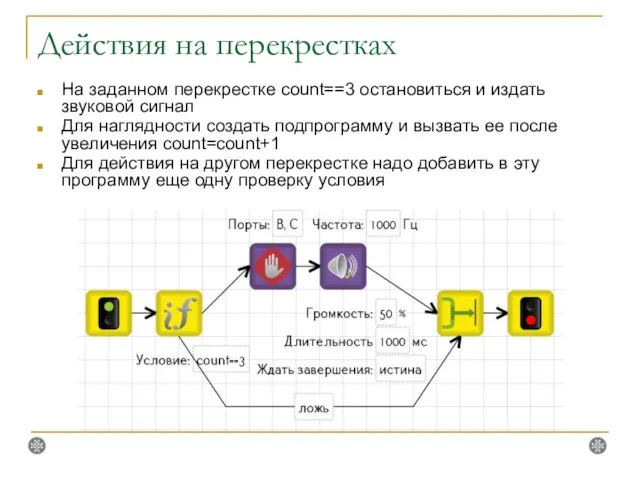
Действия на перекрестках
На заданном перекрестке count==3 остановиться и издать звуковой сигнал
Для
Действия на перекрестках
На заданном перекрестке count==3 остановиться и издать звуковой сигнал
Для

Действия на перекрестках
На 5 перекрестке сбить объект (после сигнала на 3
Действия на перекрестках
На 5 перекрестке сбить объект (после сигнала на 3
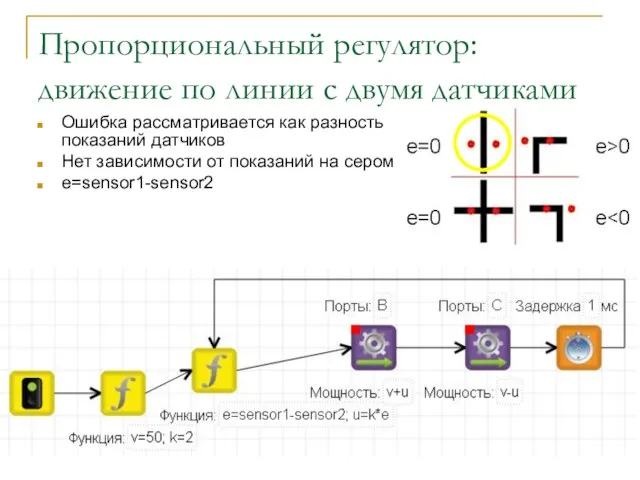
Пропорциональный регулятор: движение по линии с двумя датчиками
Ошибка рассматривается как
Пропорциональный регулятор: движение по линии с двумя датчиками
Ошибка рассматривается как
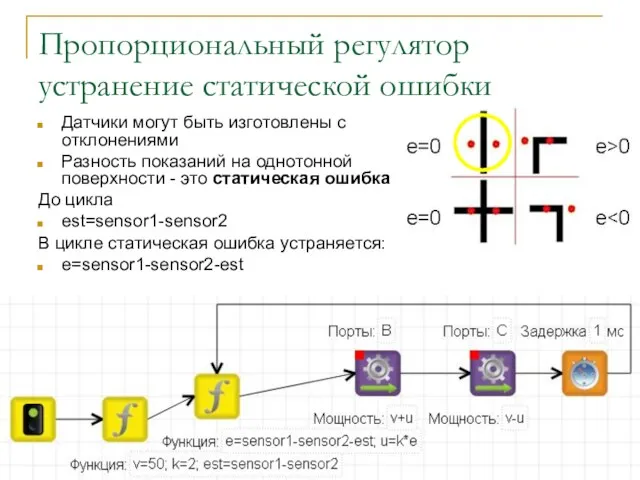
Пропорциональный регулятор устранение статической ошибки
Датчики могут быть изготовлены с отклонениями
Разность показаний
Пропорциональный регулятор устранение статической ошибки
Датчики могут быть изготовлены с отклонениями
Разность показаний
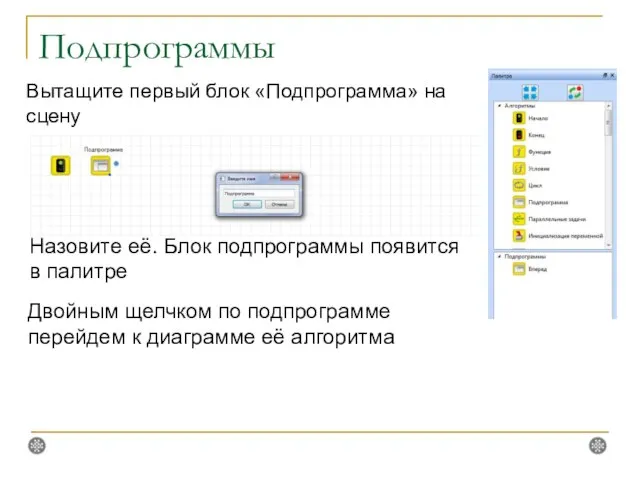
Подпрограммы
Вытащите первый блок «Подпрограмма» на сцену
Назовите её. Блок подпрограммы появится в
Подпрограммы
Вытащите первый блок «Подпрограмма» на сцену
Назовите её. Блок подпрограммы появится в
Реакция на перекрестки
Издать звуковой сигнал на перекрестке
Из-за задержки во время сигнала
Реакция на перекрестки
Издать звуковой сигнал на перекрестке
Из-за задержки во время сигнала
Пропорциональный регулятор: калибровка с ожиданием
Для точной калибровки желательно чистое одноцветное
Пропорциональный регулятор: калибровка с ожиданием
Для точной калибровки желательно чистое одноцветное

Реакция на перекрестки
Сигнал без ожидания «пиликает» постоянно…
Почему?
Скорость робота – примерно 30
Реакция на перекрестки
Сигнал без ожидания «пиликает» постоянно…
Почему?
Скорость робота – примерно 30
Реакция на перекрестки
Вложенное ветвление – еще один способ проверки перекрестка
Реакция на перекрестки
Вложенное ветвление – еще один способ проверки перекрестка
Полная калибровка для двух датчиков
Для точной калибровки отдельно считывается черное, отдельно
Полная калибровка для двух датчиков
Для точной калибровки отдельно считывается черное, отдельно

Подсчет перекрестков
П-регулятор поместить в отдельную подпрограмму
Обнуляем счетчик count и задаем все
Подсчет перекрестков
П-регулятор поместить в отдельную подпрограмму
Обнуляем счетчик count и задаем все
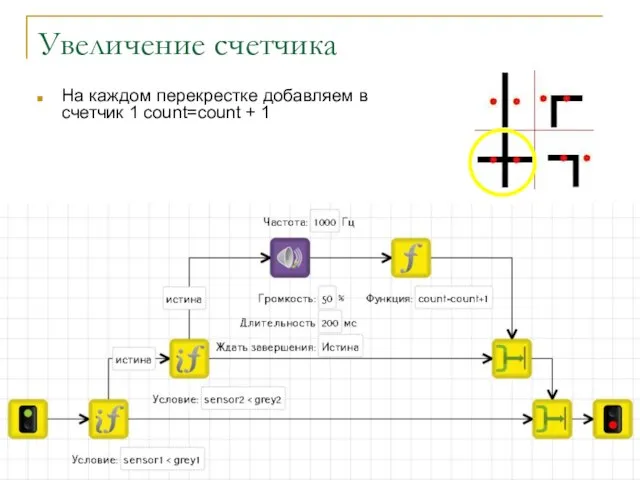
Увеличение счетчика
На каждом перекрестке добавляем в счетчик 1 count=count + 1
Увеличение счетчика
На каждом перекрестке добавляем в счетчик 1 count=count + 1

Усовершенствованный проезд перекрестка
В начале запоминаем время
На каждом перекрестке обновляем время
Засчитываем перекресток
Усовершенствованный проезд перекрестка
В начале запоминаем время
На каждом перекрестке обновляем время
Засчитываем перекресток

Реакция на объект
Подпрограмма «Объект» сдвигает банки на каждом втором перекрестке
Условие четности
Реакция на объект
Подпрограмма «Объект» сдвигает банки на каждом втором перекрестке
Условие четности
 СОДЕРЖАНИЕ 1 модуль 1. Строение атома. Опыты Резерфорда. 2. Модель атома Резерфорда. 3. Радиоактивное превращение атомных ядер. 4. Со
СОДЕРЖАНИЕ 1 модуль 1. Строение атома. Опыты Резерфорда. 2. Модель атома Резерфорда. 3. Радиоактивное превращение атомных ядер. 4. Со Стабильность сверхпроводящих проводов. Лекция 7
Стабильность сверхпроводящих проводов. Лекция 7 Свободные колебания Колебательные системы. Маятник
Свободные колебания Колебательные системы. Маятник Радиолокация. Применение радиолокации наше время
Радиолокация. Применение радиолокации наше время Насыщенный пар
Насыщенный пар Методы формирования уравнений электрического равновесия цепи
Методы формирования уравнений электрического равновесия цепи Презентация по физике Виды спектров. Спектральный анализ.
Презентация по физике Виды спектров. Спектральный анализ.  Идеальная (обратимая) тепловая машина, цикл Карно
Идеальная (обратимая) тепловая машина, цикл Карно Коэффициент полезного действия теплового двигателя
Коэффициент полезного действия теплового двигателя Презентация по физике "Лампа накаливания" - скачать
Презентация по физике "Лампа накаливания" - скачать  Научные фокусы. Электрические тени
Научные фокусы. Электрические тени Механическое движение тела
Механическое движение тела Конденсаторы. Электрическая емкость
Конденсаторы. Электрическая емкость Көкжиекке бұрыш жасай лақтырылған дененің қозғалысы. Қисық сызықты қозғалыс. Нүктенің шеңбер бойымен қозғалысы
Көкжиекке бұрыш жасай лақтырылған дененің қозғалысы. Қисық сызықты қозғалыс. Нүктенің шеңбер бойымен қозғалысы Источники звука. Характеристики звука
Источники звука. Характеристики звука Катодные процессы при коррозии металла
Катодные процессы при коррозии металла Массообменные процессы
Массообменные процессы Взаимодействие частиц и излучений с веществом
Взаимодействие частиц и излучений с веществом Техническое обслуживание и текущий ремонт двигателя, системы охлаждения и смазки
Техническое обслуживание и текущий ремонт двигателя, системы охлаждения и смазки Олимпиадный эксперимент – в школьный практикум. Часть 2
Олимпиадный эксперимент – в школьный практикум. Часть 2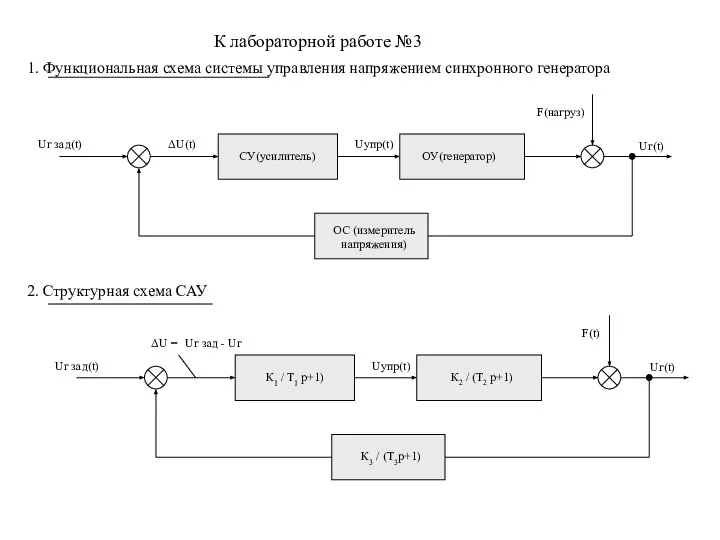 Функциональная схема системы управления напряжением синхронного генератора. (Лабораторная работа 3)
Функциональная схема системы управления напряжением синхронного генератора. (Лабораторная работа 3) Фундаментальные постоянные
Фундаментальные постоянные ЭЛЕКТРОМАГНИТНАЯ ПРИРОДА СВЕТА Презентация для учащихся 9 класса учителя физики Тулюпа Ираиды Борисовны
ЭЛЕКТРОМАГНИТНАЯ ПРИРОДА СВЕТА Презентация для учащихся 9 класса учителя физики Тулюпа Ираиды Борисовны  Отрасли машиностроения – это вклад в будущего
Отрасли машиностроения – это вклад в будущего Презентация по физике "Закон Джоуля - ленца" - скачать
Презентация по физике "Закон Джоуля - ленца" - скачать  Наноэл ЭКТ4 Одноэлектроника
Наноэл ЭКТ4 Одноэлектроника Что такое электрический ток?
Что такое электрический ток? Энергетические установки железнодорожного транспорта
Энергетические установки железнодорожного транспорта