- Сингулярность. Сингулярные конфигурации

Содержание
- 6. Характерные черты сингулярных конфигураций Движение вдоль некоторых направлений может оказаться невозможным Для достижения конечной скорости выходного
- 7. Нахождение сингулярных конфигураций с помощью определителя Якобиана
- 8. Декомпозиция манипуляционных систем с 6 степенями свободы
- 9. Декомпозиция манипуляционных систем с 6 степенями свободы
- 10. Декомпозиция манипуляционных систем с 6 степенями свободы Выберем
- 11. Декомпозиция манипуляционных систем с 6 степенями свободы
- 12. Декомпозиция манипуляционных систем с 6 степенями свободы – часть, которая соответствует схвату и его ориентации
- 13. Сингулярные конфигурации схвата Сингулярность имеет место на схвате: тогда и только тогда, когда шарнирные оси совпадают
- 14. Сингулярные конфигурации
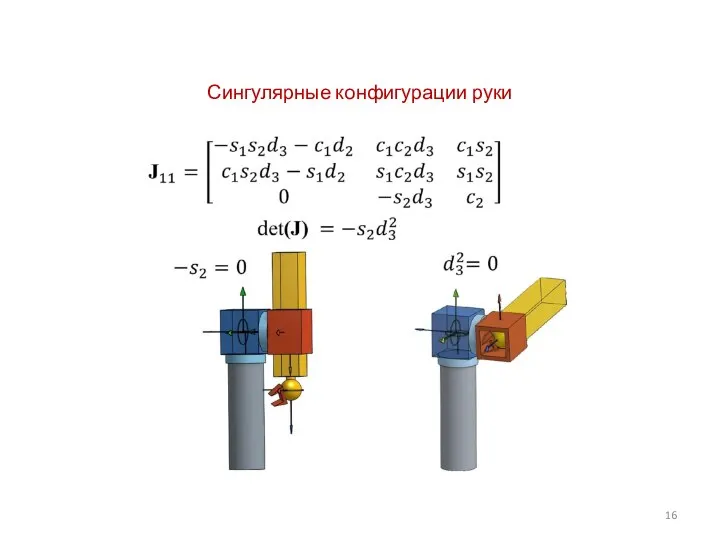
- 15. Сингулярные конфигурации руки – Якобиан положения для звеньев 1-3
- 16. Сингулярные конфигурации руки
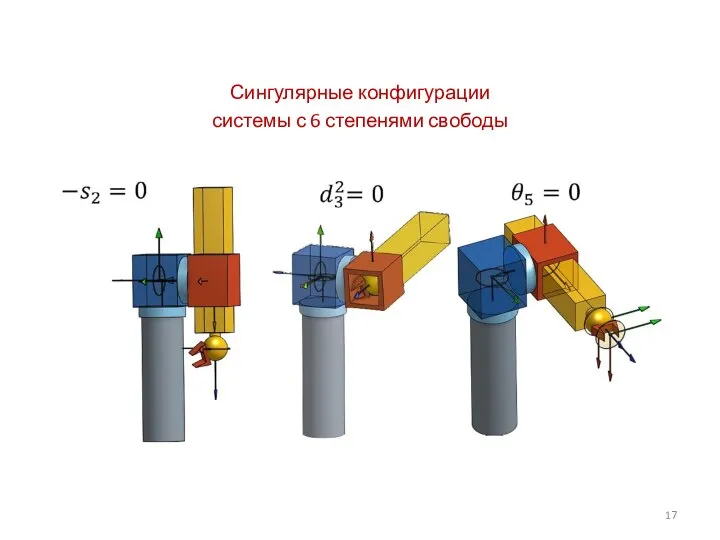
- 17. Сингулярные конфигурации системы с 6 степенями свободы
- 18. Манипулируемость
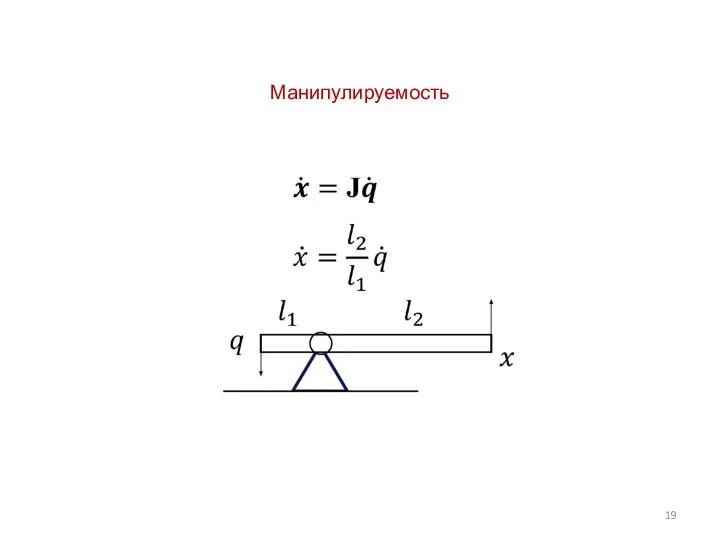
- 19. Манипулируемость
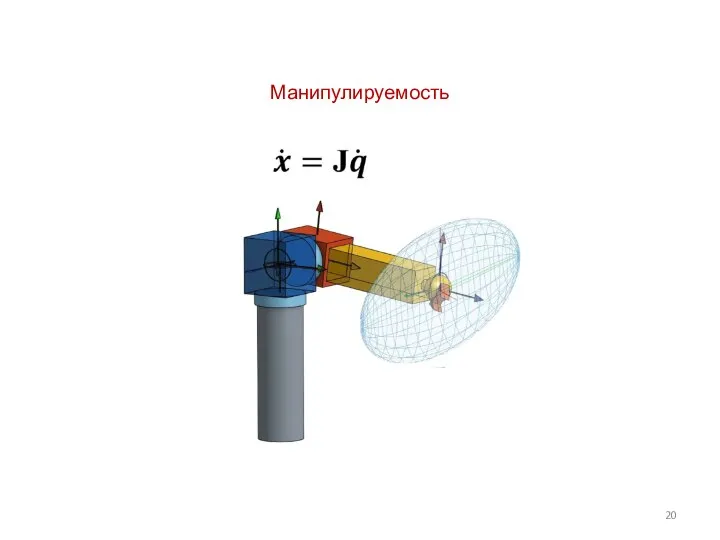
- 20. Манипулируемость
- 22. Манипулируемость
- 23. Манипулируемость
- 25. Скачать презентацию




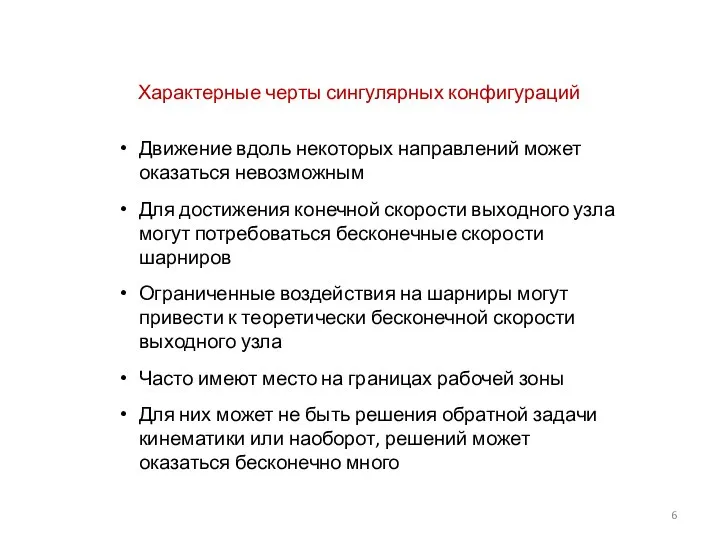
Характерные черты сингулярных конфигураций
Движение вдоль некоторых направлений может оказаться невозможным
Для достижения
Характерные черты сингулярных конфигураций
Движение вдоль некоторых направлений может оказаться невозможным
Для достижения
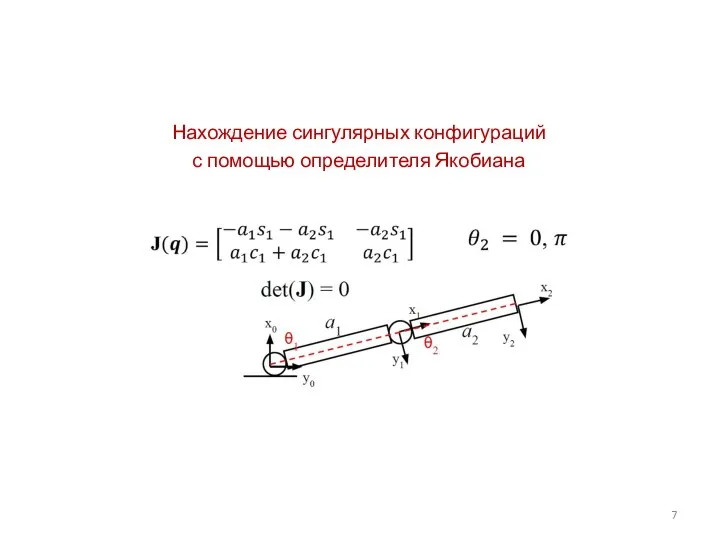
Нахождение сингулярных конфигураций
с помощью определителя Якобиана
Нахождение сингулярных конфигураций
с помощью определителя Якобиана

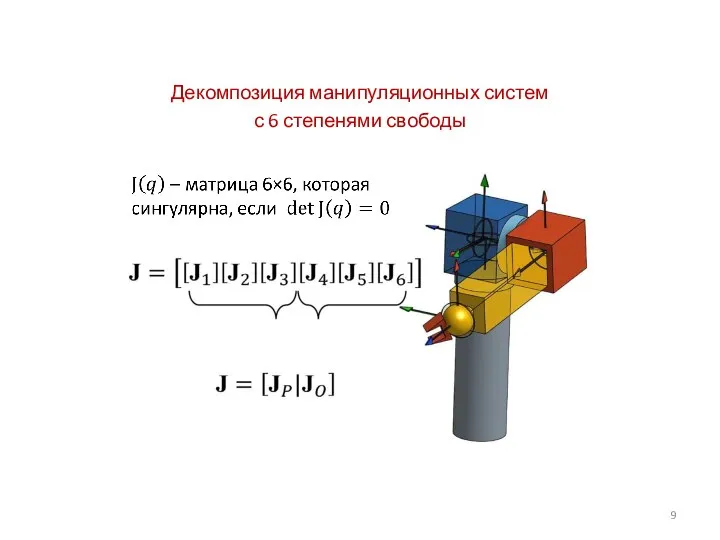
Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
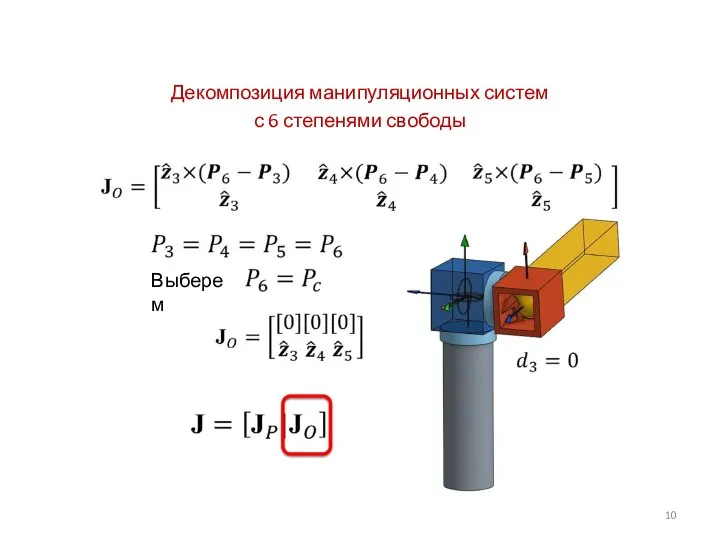
Декомпозиция манипуляционных систем
с 6 степенями свободы
Выберем
Декомпозиция манипуляционных систем
с 6 степенями свободы
Выберем
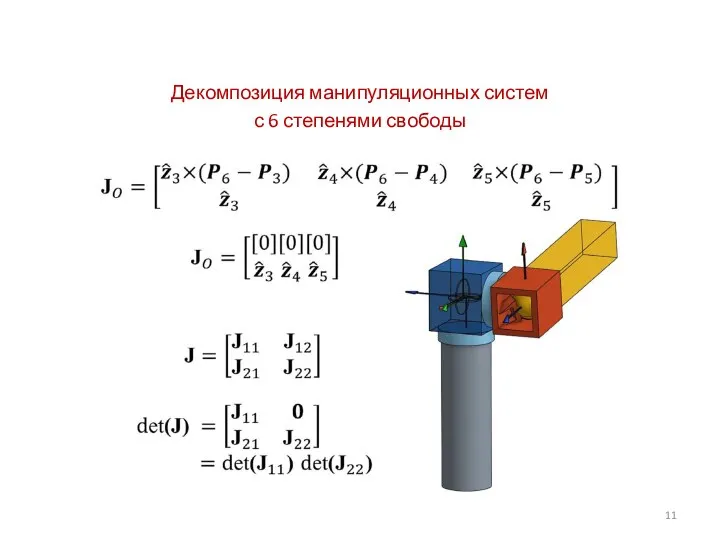
Декомпозиция манипуляционных систем
с 6 степенями свободы
Декомпозиция манипуляционных систем
с 6 степенями свободы
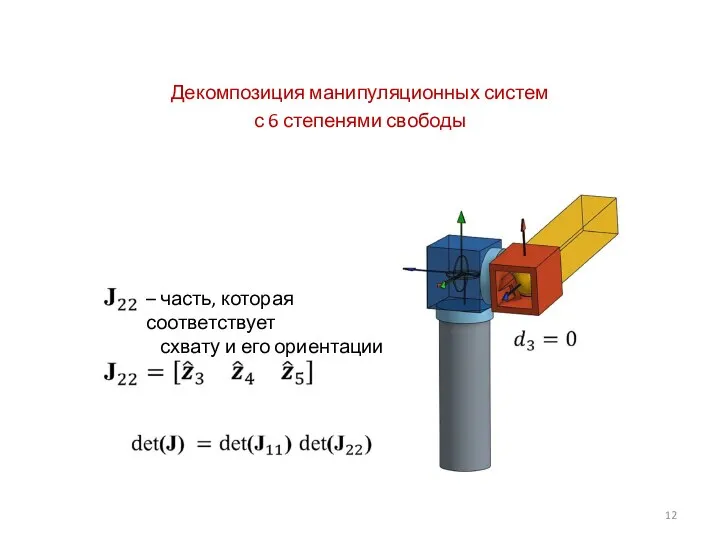
Декомпозиция манипуляционных систем
с 6 степенями свободы
– часть, которая соответствует
схвату
Декомпозиция манипуляционных систем
с 6 степенями свободы
– часть, которая соответствует
схвату
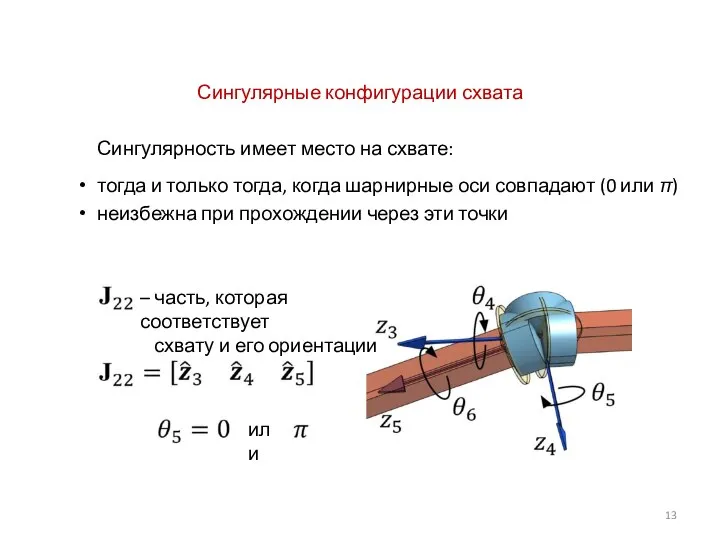
Сингулярные конфигурации схвата
Сингулярность имеет место на схвате:
тогда и только тогда, когда
Сингулярные конфигурации схвата
Сингулярность имеет место на схвате:
тогда и только тогда, когда

Сингулярные конфигурации
Сингулярные конфигурации
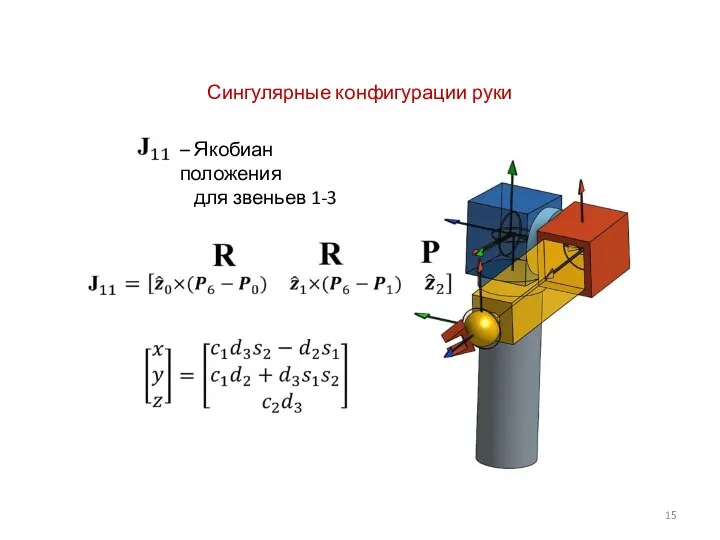
Сингулярные конфигурации руки
– Якобиан положения
для звеньев 1-3
Сингулярные конфигурации руки
– Якобиан положения
для звеньев 1-3
Сингулярные конфигурации руки
Сингулярные конфигурации руки
Сингулярные конфигурации
системы с 6 степенями свободы
Сингулярные конфигурации
системы с 6 степенями свободы
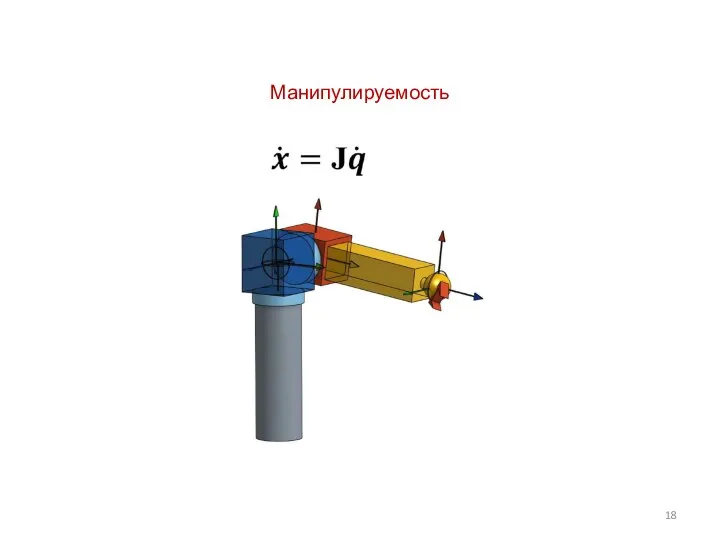
Манипулируемость
Манипулируемость
Манипулируемость
Манипулируемость
Манипулируемость
Манипулируемость

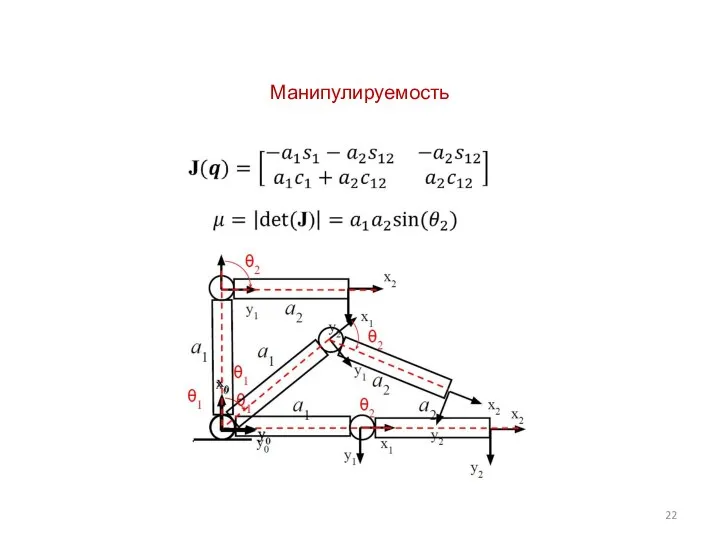
Манипулируемость
Манипулируемость
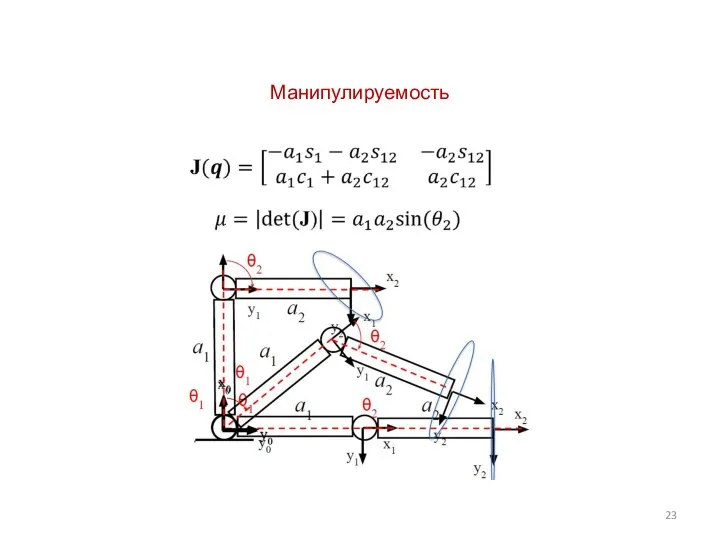
Манипулируемость
Манипулируемость
 Электроразведочные методы на этапах поиска и оценки рудных месторождений
Электроразведочные методы на этапах поиска и оценки рудных месторождений Основные свойства атомных ядер. Масса и энергия связи ядра
Основные свойства атомных ядер. Масса и энергия связи ядра Динамика вращательного движения. Момент силы
Динамика вращательного движения. Момент силы Атмосферное давление Цель урока: сформировать представление об атмосферном давлении и закономерностях его изменения Научитьс
Атмосферное давление Цель урока: сформировать представление об атмосферном давлении и закономерностях его изменения Научитьс Почему радуга разноцветная
Почему радуга разноцветная Зависимость силы тока от напряжения. Электрическое сопротивление
Зависимость силы тока от напряжения. Электрическое сопротивление Основные Законы Природы
Основные Законы Природы Решение задач. Закон всемирного тяготения
Решение задач. Закон всемирного тяготения «Вес воздуха. Атмосферное давление». Цель урока: 1. Рассмотреть причины, создающие атмосферное давление. 2. Экспериментально док
«Вес воздуха. Атмосферное давление». Цель урока: 1. Рассмотреть причины, создающие атмосферное давление. 2. Экспериментально док Шина Can, управления электрическими устройствами автомобиля
Шина Can, управления электрическими устройствами автомобиля Загадка Роберта Вуда (спектры и спектральный анализ)
Загадка Роберта Вуда (спектры и спектральный анализ) Свойства твёрдых тел, жидкостей и газов
Свойства твёрдых тел, жидкостей и газов Люминесценция биологических объектов
Люминесценция биологических объектов Типовой расчет №3. Молекулярная физика и термодинамика
Типовой расчет №3. Молекулярная физика и термодинамика Катушка Тесла
Катушка Тесла Гигрометр. Виды гигрометров
Гигрометр. Виды гигрометров Радиотолқындар. Радиотолқындар мен инфрақызыл сәулелердің
Радиотолқындар. Радиотолқындар мен инфрақызыл сәулелердің Назначение и общее устройство трактора Беларус1221
Назначение и общее устройство трактора Беларус1221 Механические свойства металлов
Механические свойства металлов История ракетостроения
История ракетостроения Решение экзаменационных задач по МОАНИ
Решение экзаменационных задач по МОАНИ Исследовательская работа по теме: «Фруктовые и овощные батарейки».
Исследовательская работа по теме: «Фруктовые и овощные батарейки». Формулы расчёта оптической силы интраокулярных линз
Формулы расчёта оптической силы интраокулярных линз Общая энергетика. Теория теплообмена. Теплопроводность
Общая энергетика. Теория теплообмена. Теплопроводность Москаленко Анна 10-М
Москаленко Анна 10-М  Насыщенный пар. Влажность воздуха
Насыщенный пар. Влажность воздуха Поляризация
Поляризация  Законы сохранения в механике
Законы сохранения в механике