- Теоретическая (техническая) механика. Статика

Содержание
- 2. Механика - наука о движении материальных тел и взаимодействии между ними. Принципы и законы механики использовались
- 3. Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства движения и равновесия материальных тел.
- 4. Таким образом, с одной стороны статика и кинематика нужны для изучения динамики, а с другой -
- 5. Рис.1.1. Структура курса теоретической механики и связь ее с другими дисциплинами В. математика Теоретическая механика Статика
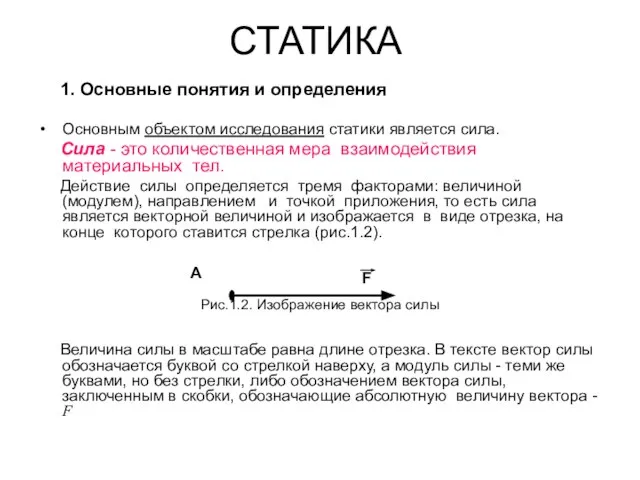
- 6. СТАТИКА 1. Основные понятия и определения Основным объектом исследования статики является сила. Сила - это количественная
- 7. Модуль силы в общепринятой в настоящее время системе единиц СИ измеряется в ньютонах (Н), применяются и
- 8. Основными задачами статики являются: 1. Приведение данной системы сил к простейшему виду (упрощение). 2. Исследование условий
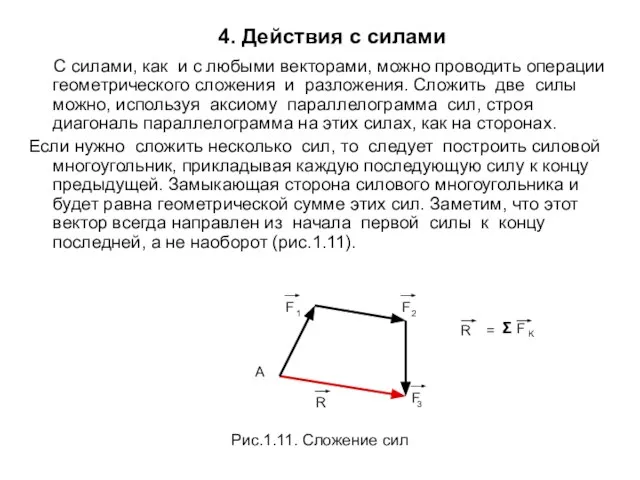
- 9. Уравновешенной называется система сил, действие которой эквивалентно нулю. Равнодействующая - это сила, действие которой эквивалентно действию
- 10. 2. Аксиомы статики 1. Если на свободное твердое тело действуют две силы, то тело может находиться
- 11. Рис.1.4. Следствие второй аксиомы статики Следствие: не изменяя действие силы, ее можно переносить вдоль линии действия.
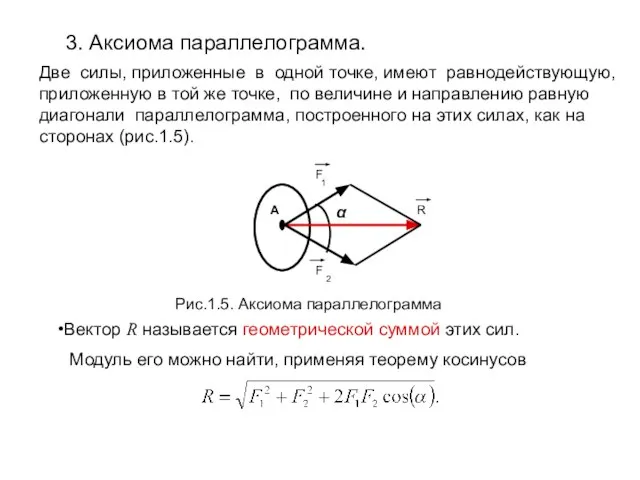
- 12. 3. Аксиома параллелограмма. Рис.1.5. Аксиома параллелограмма Вектор R называется геометрической суммой этих сил. Модуль его можно
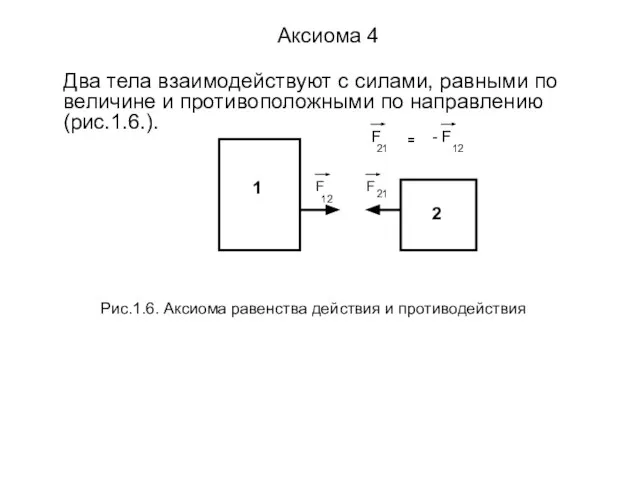
- 13. Аксиома 4 Два тела взаимодействуют с силами, равными по величине и противоположными по направлению (рис.1.6.). Рис.1.6.
- 14. 3. Связи и их реакции Рассматриваемые в механике тела могут быть свободными и несвободными. Свободным называется
- 15. Рис.1.7.Гибкая связь Простейшие виды связей. Гибкая связь (нить, трос, цепь и т.д.). Поскольку нить ограничивает перемещение
- 16. 2. Гладкая (без трения) поверхность (опора). В этом случае реакция направлена по нормали к поверхности (рис.1.8,а).
- 17. 3. Тонкий невесомый стержень с шарнирным закреплением концов. Поскольку стержень находится в равновесии под действием двух
- 18. Рис.1.10. Аксиома отбрасывания связей Одной из важных задач статики является определение реакций связей. Для этого используется
- 19. С силами, как и с любыми векторами, можно проводить операции геометрического сложения и разложения. Сложить две
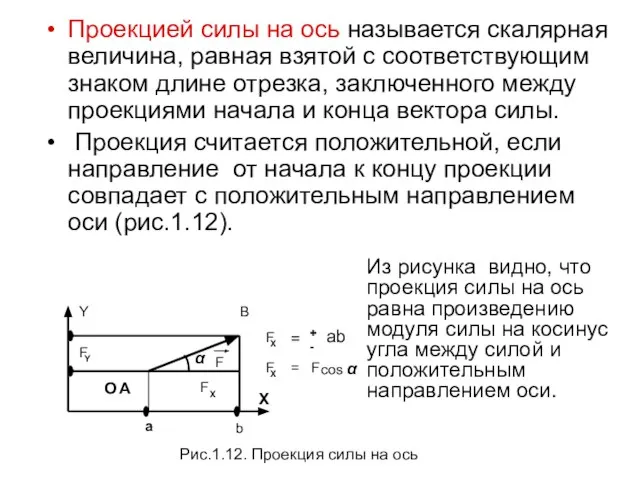
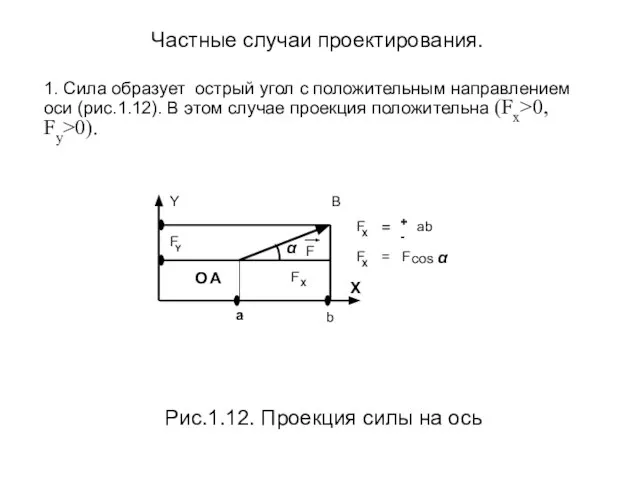
- 20. Проекцией силы на ось называется скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между
- 21. Частные случаи проектирования. 1. Сила образует острый угол с положительным направлением оси (рис.1.12). В этом случае
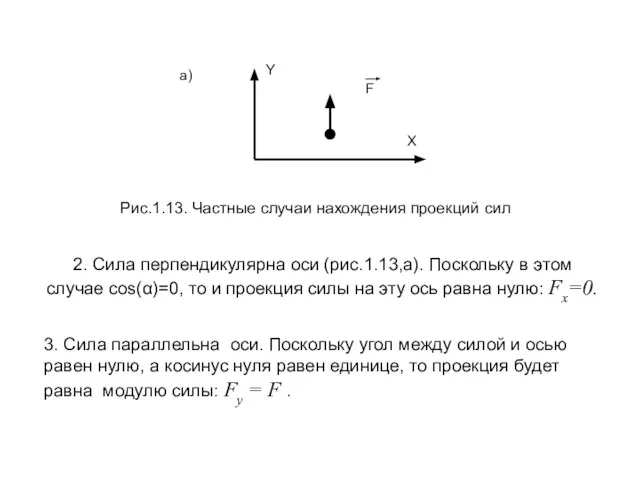
- 22. 2. Сила перпендикулярна оси (рис.1.13,а). Поскольку в этом случае cos(α)=0, то и проекция силы на эту
- 23. 4. Сила образует тупой угол с положительным направлением оси (рис.1.13,б). Рис.1.13. Частные случаи нахождения проекций сил
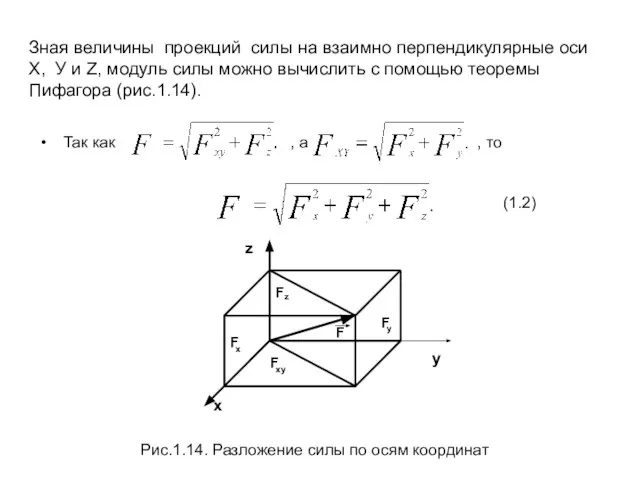
- 24. Так как , а , то (1.2) Рис.1.14. Разложение силы по осям координат Зная величины проекций
- 25. Аналитический способ сложения сил Rx= F1x+F2x+F3x, или Rх =ΣFкх. R = F 1 + F 2
- 26. 5. Сходящаяся система сил После переноса точек приложения сил в точку А можно последовательно сложить все
- 27. Вторая задача статики - разработка условий равновесия. Они могут быть получены в двух видах: Геометрическое условие.
- 28. Выражения (1.4,а) являются уравнениями равновесия сходящейся системы сил: система сил находится в равновесии, когда алгебраическая сумма
- 29. Лекция 2 Плоская произвольная система сип Это система сил, как угодно расположенных в 1 плоскости Для
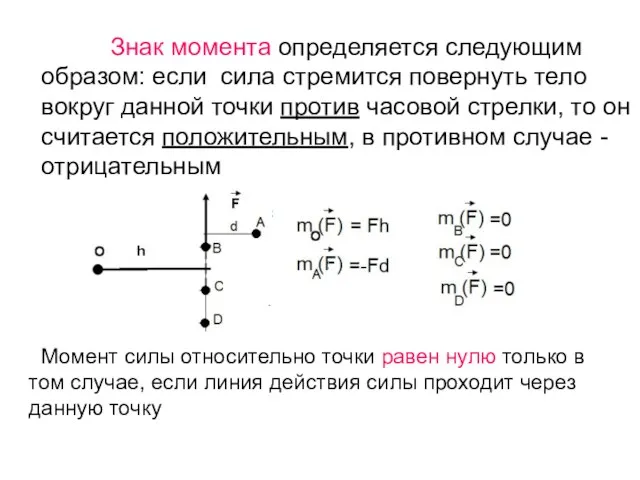
- 30. Для характеристики вращательного действия силы вводится понятие момента силы относительно точки. Моментом силы относительно точки называется
- 31. Знак момента определяется следующим образом: если сила стремится повернуть тело вокруг данной точки против часовой стрелки,
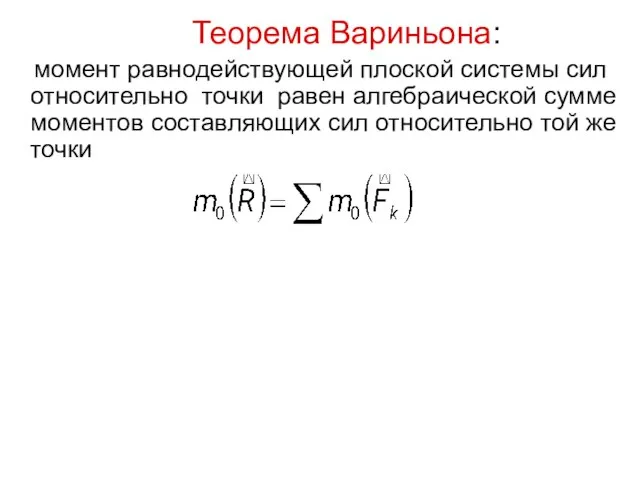
- 32. Теорема Вариньона: момент равнодействующей плоской системы сил относительно точки равен алгебраической сумме моментов составляющих сил относительно
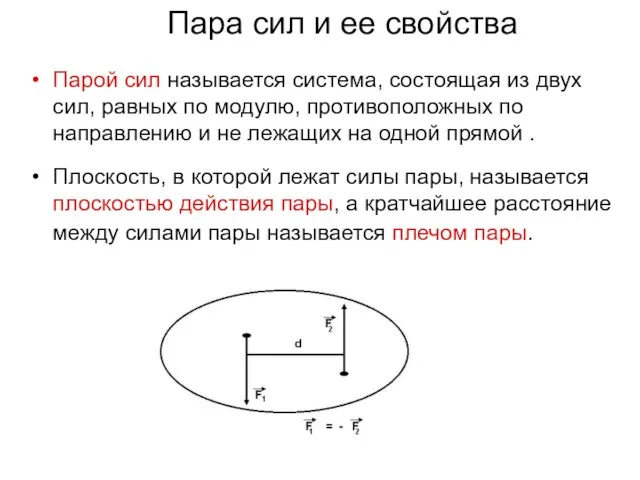
- 33. Пара сил и ее свойства Парой сил называется система, состоящая из двух сил, равных по модулю,
- 34. Моментом пары называется алгебраическая величина, модуль которой равен произведению одной из сил на плечо пары m
- 35. Часто пары изображают в виде круговой стрелки и называют пару сосредоточенным моментом . Поскольку действие пары
- 36. Это значит, что вращательное действие пары относительно любой точки одинаковое Отметим еще одно важное свойство пары
- 37. Теорема о параллельном переносе силы Приложим в произвольной точке В уравновешенную систему сил F1 и F2
- 38. В результате имеем систему, состоящую из силы F, приложенной в точке В, и равную по модулю
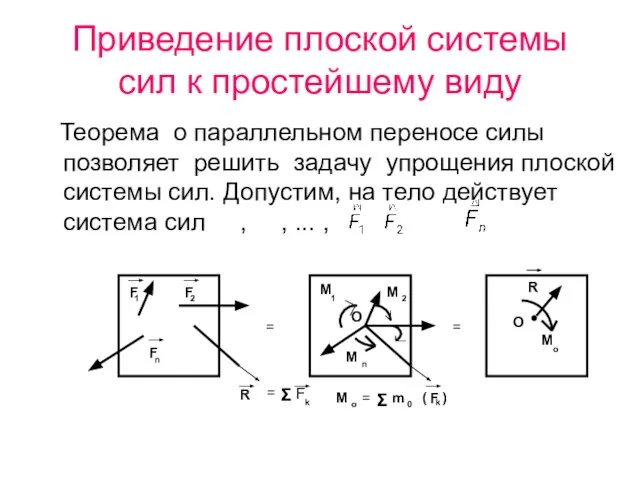
- 39. Приведение плоской системы сил к простейшему виду Теорема о параллельном переносе силы позволяет решить задачу упрощения
- 40. Выберем произвольную точку О, которая называется центром приведения, и, используя теорему о параллельном переносе силы, перенесем
- 41. Отсюда следует, что данная система будет находиться в равновесии, если результирующая сила и момент результирующей пары
- 42. Опорные устройства балок Балкой называется тело, размерами сечения которого по сравнению с длиной можно пренебречь и
- 43. 1. Шарнирно подвижная опора Такая опора допускает поворот вокруг оси шарнира и линейное перемещение, параллельное опорной
- 44. 2. Шарнирно неподвижная опора Эта опора допускает только поворот вокруг оси шарнира и препятствует перемещению закрепленного
- 45. 3. Жесткая заделка Заделка препятствует повороту и любому перемещению балки, поэтому неизвестна не только величина и
- 46. Если нагрузка распределяется по участку равномерно – то называется равномерно распределенной Такая нагрузка характеризуется интенсивностью q
- 47. Пример . Определить реакции шарнирно опертой балки, нагруженной силой F и парой сил с моментом М.
- 48. Решение. Объектом равновесия является вся балка, нагрузка на которую показана на чертеже. Отбросим связи - шарниры
- 49. Уравнения проекций 1. ΣFkx = 0; RAx -F⋅cos(60) = 0; 2. ΣFky = 0; RAy +
- 50. и воспользоваться теоремой Вариньона, причем следует учесть, что момент от силы относительно точки А равен нулю,
- 51. Расчет составных конструкций Твердые тела, равновесие которых рассматривается в статике, являются моделями реальных конструкций элементов сооружений
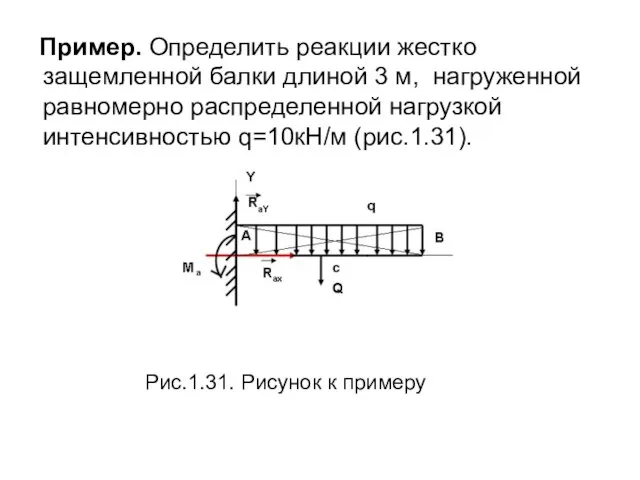
- 52. Пример. Определить реакции жестко защемленной балки длиной 3 м, нагруженной равномерно распределенной нагрузкой интенсивностью q=10кН/м (рис.1.31).
- 53. Решение. Заменим равномерно распределенную нагрузку ее равнодействующей Q = 3⋅q = 3⋅10 = 30 кН. Она
- 54. Расчет составных конструкций Твердые тела, равновесие которых рассматривается в статике, являются моделями реальных конструкций элементов сооружений
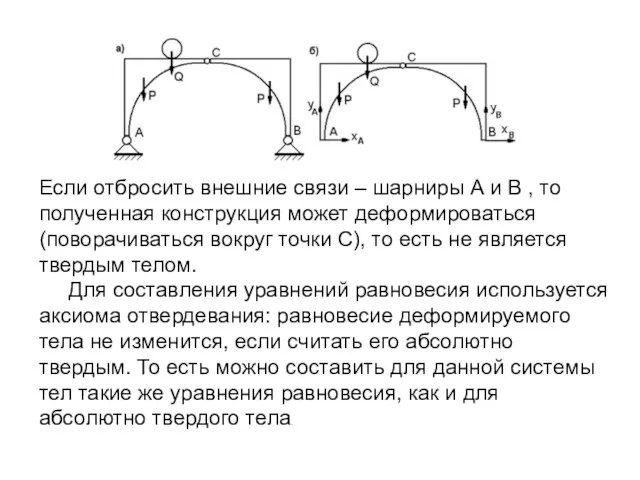
- 55. Если отбросить внешние связи – шарниры А и В , то полученная конструкция может деформироваться (поворачиваться
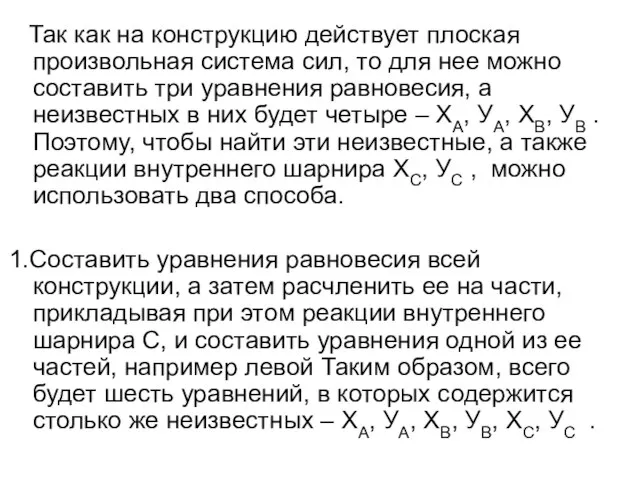
- 56. Так как на конструкцию действует плоская произвольная система сил, то для нее можно составить три уравнения
- 57. Расчет составной конструкции по частям 2. Не составляя уравнения равновесия всей конструкции, рассмотреть равновесие каждой ее
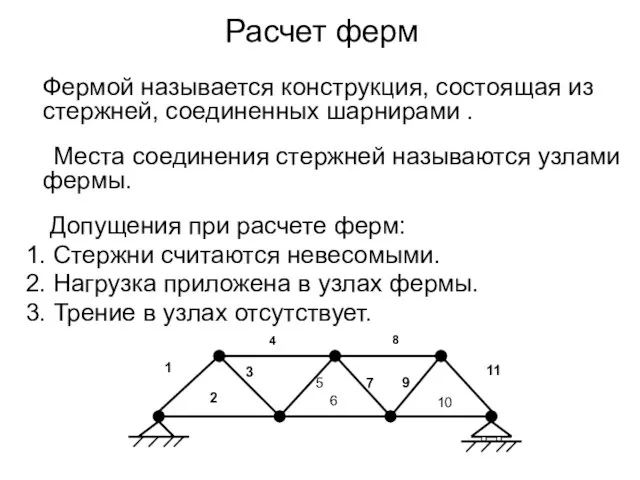
- 59. Фермой называется конструкция, состоящая из стержней, соединенных шарнирами . Места соединения стержней называются узлами фермы. Допущения
- 60. Для плоских статически определимых ферм число стержней S и число узлов n связаны уравнением S=2n-3. Если
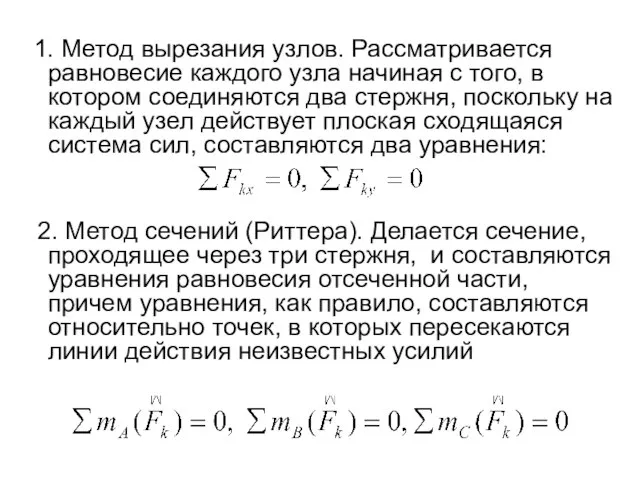
- 61. 1. Метод вырезания узлов. Рассматривается равновесие каждого узла начиная с того, в котором соединяются два стержня,
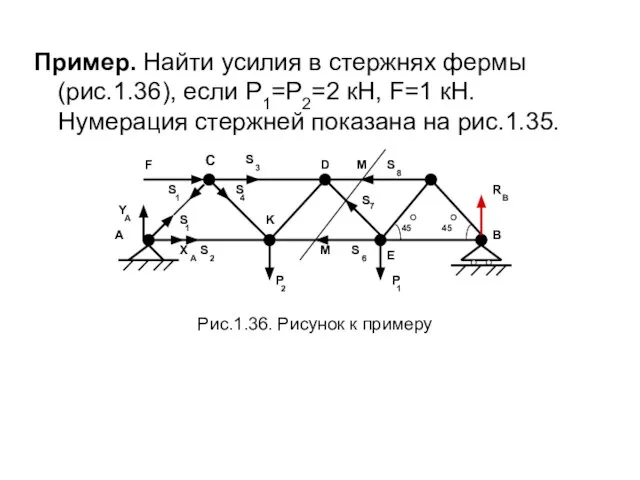
- 63. Пример. Найти усилия в стержнях фермы (рис.1.36), если Р1=Р2=2 кН, F=1 кН. Нумерация стержней показана на
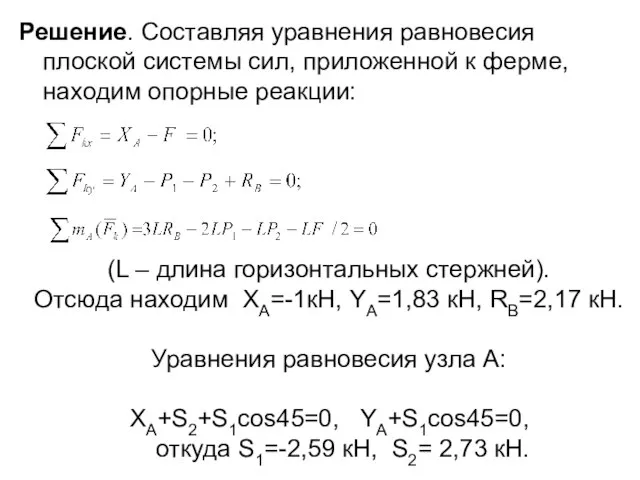
- 64. Решение. Составляя уравнения равновесия плоской системы сил, приложенной к ферме, находим опорные реакции: (L – длина
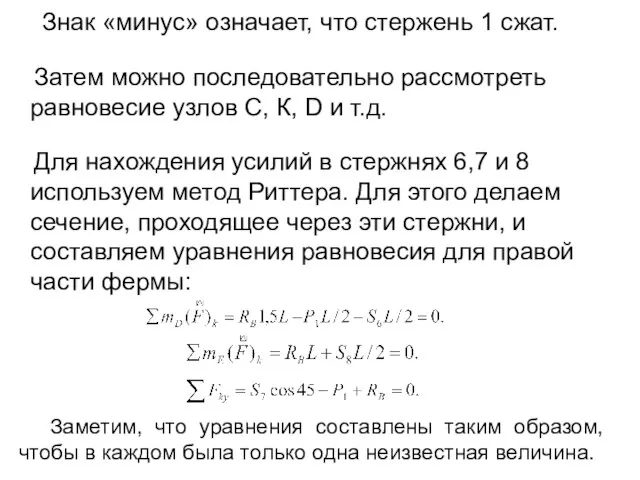
- 65. Знак «минус» означает, что стержень 1 сжат. Затем можно последовательно рассмотреть равновесие узлов С, К, D
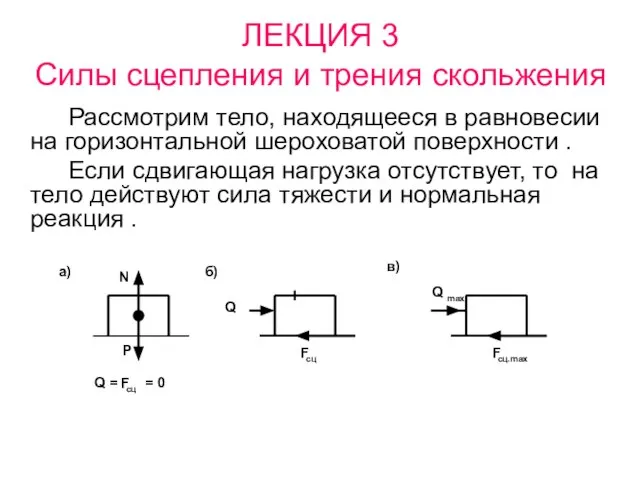
- 66. Рассмотрим тело, находящееся в равновесии на горизонтальной шероховатой поверхности . Если сдвигающая нагрузка отсутствует, то на
- 67. При приложении небольшой сдвигающей нагрузки в месте контакта поверхностей возникает сила сцепления, по модулю равная этой
- 68. Существуют различные теории сил сцепления и трения. Наиболее простой и распространенной из них является теория Амонтона-Kулона.
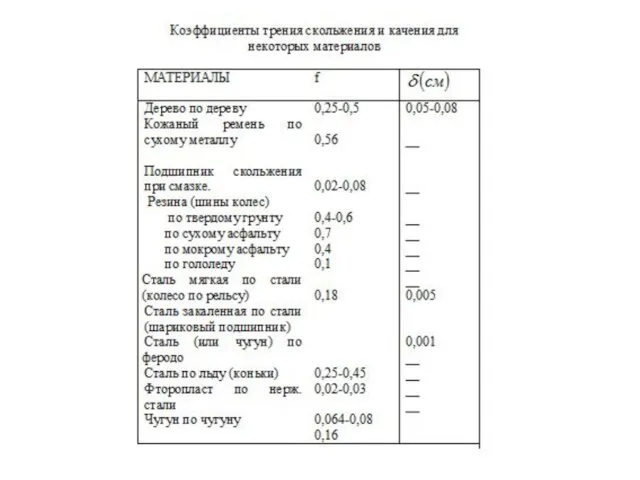
- 69. 3. Сила трения при скольжении меньше максимальной силы сцепления. Величина коэффициентов сцепления и трения зависит от
- 70. 2. Имеет место предельное состояние, то есть сила сцепления равна максимальной. В этом случае составляются обычные
- 71. Решение. Составим уравнения равновесия тела в виде проекций сил на горизонтальную и вертикальную оси: Q⋅cos30-Fсц=0; N-P-Q⋅sin30=0.
- 72. Пример 2. Определить, какую минимальную силу Q нужно приложить, чтобы сдвинуть тело с места (рис.1.39). Решение.
- 74. Опытное определение коэффициента сцепления Прибор для определения коэффициента сцепления
- 75. Плоскость поворачивают до тех пор, пока тело не начинает скользить и замеряется минимальный угол. Рассмотрим предельное
- 76. Окончательно получим То есть коэффициент сцепления равен тангенсу минимального угла наклона, при котором тело срывается с
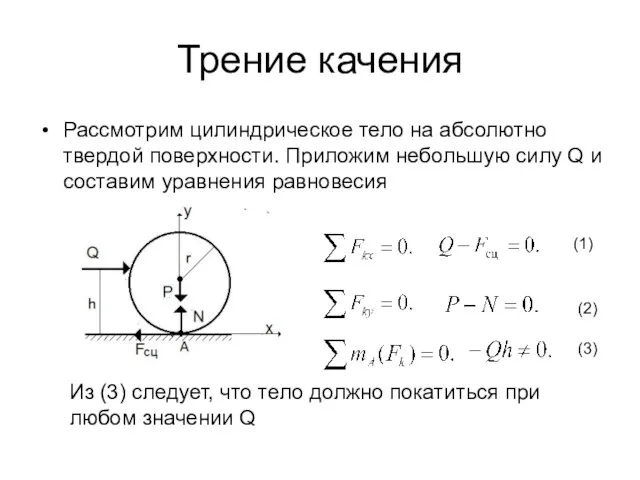
- 77. Трение качения Рассмотрим цилиндрическое тело на абсолютно твердой поверхности. Приложим небольшую силу Q и составим уравнения
- 78. Реальные поверхности являются деформируемыми и реакция N смещается на величину δ C увеличение силы Q это
- 79. Закон трения: где коэффициент трения качения, Условия равновесия: . .
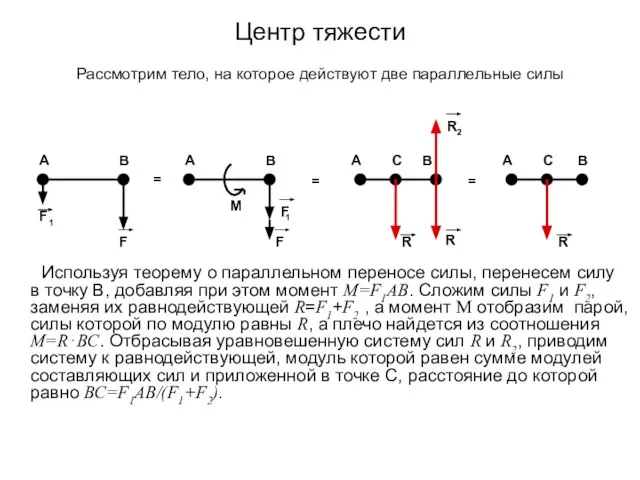
- 81. Центр тяжести Рассмотрим тело, на которое действуют две параллельные силы Используя теорему о параллельном переносе силы,
- 82. Проводя аналогичные построения и перенося силу в точку А, найдем расстояние AС=F2AB/(F1+F2). Отсюда АС/ВС=F2/F1, то есть
- 83. Для нахождения координат центра параллельных сил можно воспользоваться теоремой Вариньона о моменте равнодействующей относительно оси У
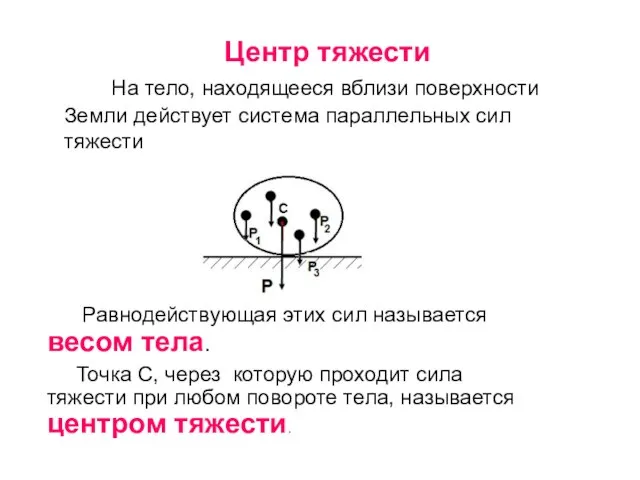
- 84. Центр тяжести На тело, находящееся вблизи поверхности Земли действует система параллельных сил тяжести Равнодействующая этих сил
- 85. Важной технической задачей при проектировании машин является определение положения центра тяжести. Для нахождения координат центра тяжести
- 86. где Р -вес тела, Рк- вес отдельных частиц, Хк, Ук, Zк – координаты этих частиц Полученные
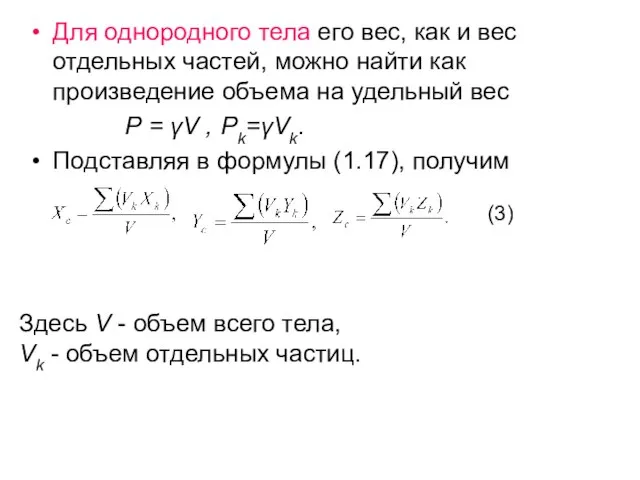
- 87. Для однородного тела его вес, как и вес отдельных частей, можно найти как произведение объема на
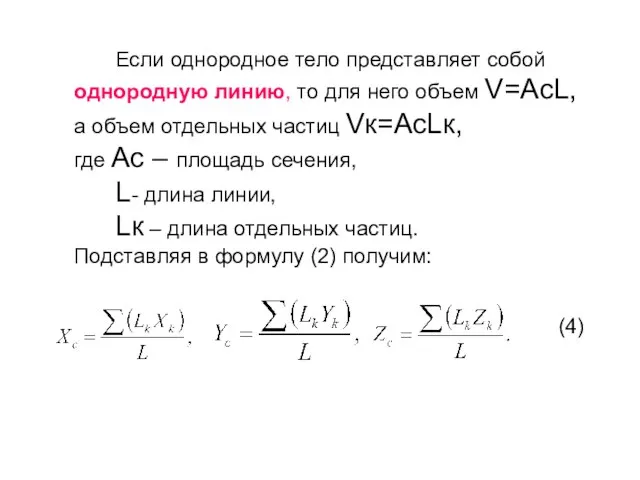
- 88. Если однородное тело представляет собой однородную линию, то для него объем V=AcL, а объем отдельных частиц
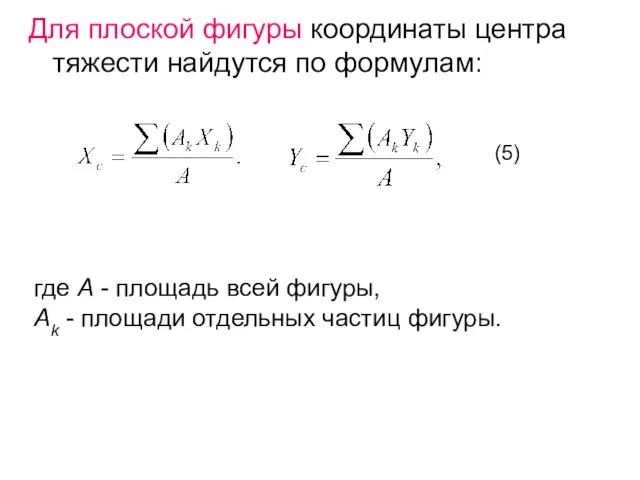
- 89. Для плоской фигуры координаты центра тяжести найдутся по формулам: (5) где А - площадь всей фигуры,
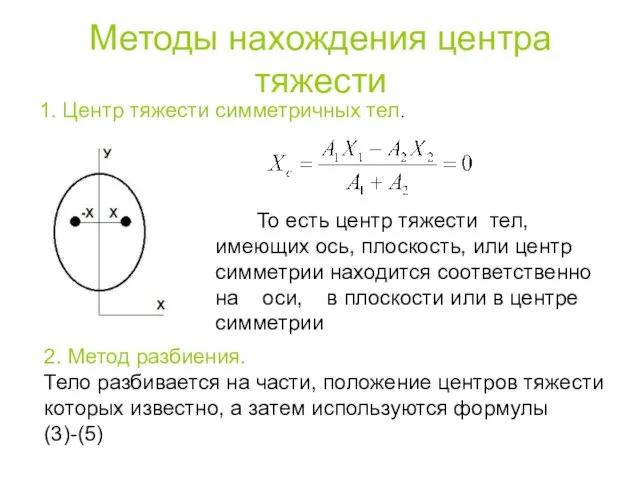
- 90. Методы нахождения центра тяжести 1. Центр тяжести симметричных тел. То есть центр тяжести тел, имеющих ось,
- 91. 3. Метод дополнения. Применяется для тел, имеющих вырезы или выемки. При этом тело дополняется до целого,
- 92. Пример. Определить координаты центра тяжести плоской фигуры. Решение. Выберем оси координат с началом в нижнем левом
- 93. Тогда формула (5) для определения координаты Хc примет вид где А1 = 5⋅10 = 50 см2
- 94. Аналогично можем найти и координату Уc однако это не имеет смысла, так как центр тяжести всей
- 95. Пример. Определить центр тяжести фигуры Разбиваем тело на 2 части. Круг диаметром R Круг диаметром r
- 97. Скачать презентацию
Механика - наука о движении материальных тел и взаимодействии между ними.
Механика - наука о движении материальных тел и взаимодействии между ними.
Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства
Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства
Таким образом, с одной стороны статика и кинематика нужны для изучения
Таким образом, с одной стороны статика и кинематика нужны для изучения
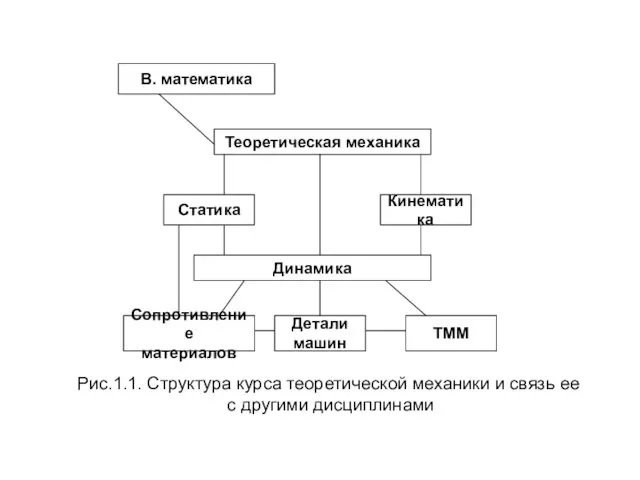
Рис.1.1. Структура курса теоретической механики и связь ее
с другими дисциплинами
В.
Рис.1.1. Структура курса теоретической механики и связь ее
с другими дисциплинами
В.
СТАТИКА
1. Основные понятия и определения
Основным объектом исследования статики является сила.
СТАТИКА
1. Основные понятия и определения
Основным объектом исследования статики является сила.
Модуль силы в общепринятой в настоящее время системе единиц СИ
Модуль силы в общепринятой в настоящее время системе единиц СИ
Основными задачами статики являются:
1. Приведение данной системы сил к простейшему виду
Основными задачами статики являются:
1. Приведение данной системы сил к простейшему виду
Уравновешенной называется система сил, действие которой эквивалентно нулю.
Равнодействующая - это сила,
Уравновешенной называется система сил, действие которой эквивалентно нулю.
Равнодействующая - это сила,

2. Аксиомы статики
1. Если на свободное твердое тело действуют
2. Аксиомы статики
1. Если на свободное твердое тело действуют
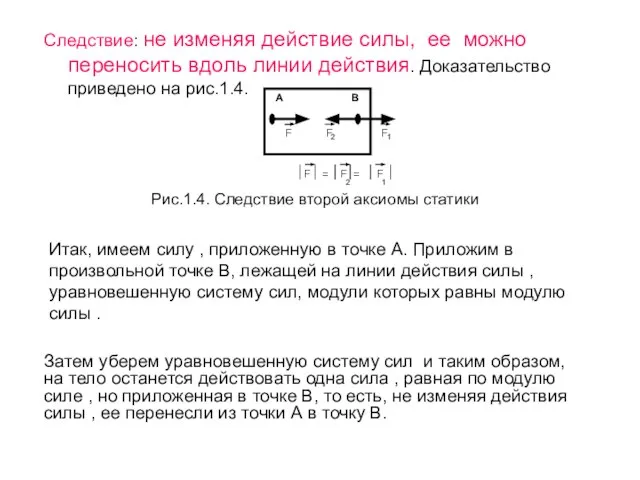
Рис.1.4. Следствие второй аксиомы статики
Следствие: не изменяя действие силы, ее можно
Рис.1.4. Следствие второй аксиомы статики
Следствие: не изменяя действие силы, ее можно
3. Аксиома параллелограмма.
Рис.1.5. Аксиома параллелограмма
Вектор R называется геометрической суммой
3. Аксиома параллелограмма.
Рис.1.5. Аксиома параллелограмма
Вектор R называется геометрической суммой
Аксиома 4
Два тела взаимодействуют с силами, равными по величине и
Аксиома 4
Два тела взаимодействуют с силами, равными по величине и
3. Связи и их реакции
Рассматриваемые в механике тела могут
3. Связи и их реакции
Рассматриваемые в механике тела могут
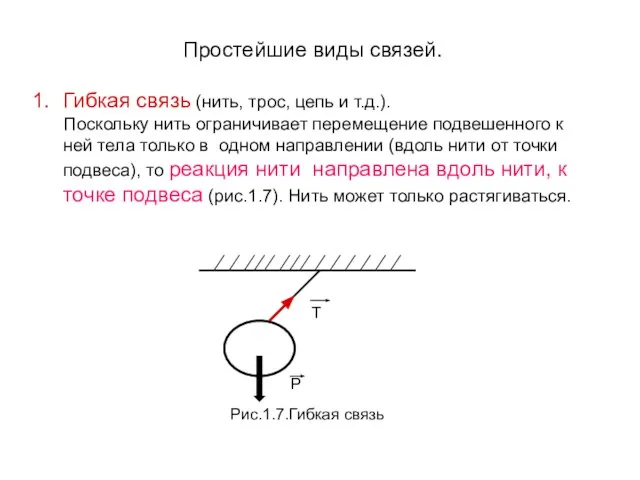
Рис.1.7.Гибкая связь
Простейшие виды связей.
Гибкая связь (нить, трос, цепь и т.д.).
Рис.1.7.Гибкая связь
Простейшие виды связей.
Гибкая связь (нить, трос, цепь и т.д.).
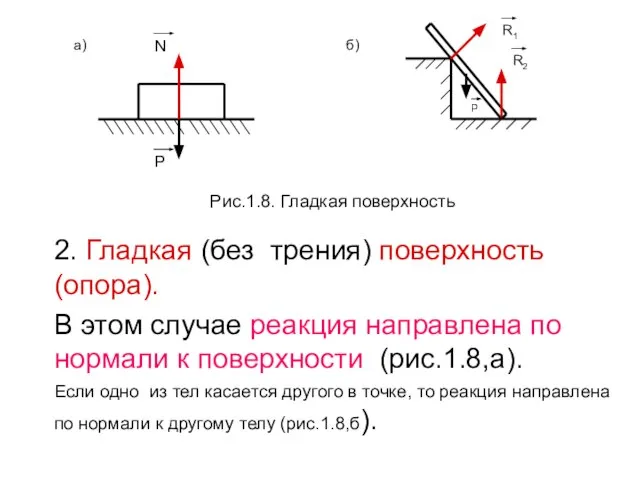
2. Гладкая (без трения) поверхность (опора).
В этом случае реакция направлена
2. Гладкая (без трения) поверхность (опора).
В этом случае реакция направлена
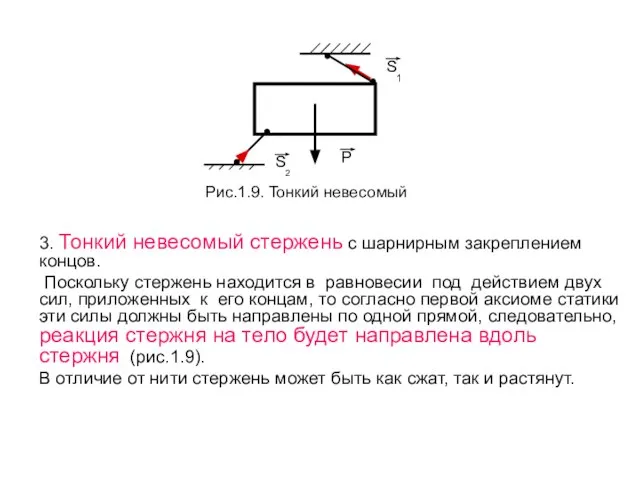
3. Тонкий невесомый стержень с шарнирным закреплением концов.
Поскольку стержень находится
3. Тонкий невесомый стержень с шарнирным закреплением концов.
Поскольку стержень находится
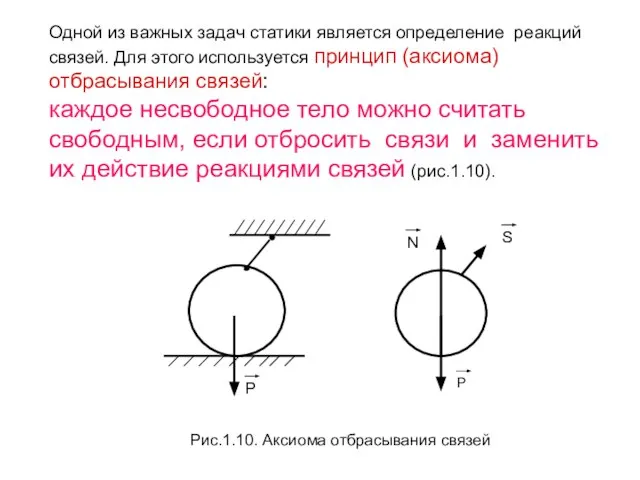
Рис.1.10. Аксиома отбрасывания связей
Одной из важных задач статики является определение реакций
Рис.1.10. Аксиома отбрасывания связей
Одной из важных задач статики является определение реакций
С силами, как и с любыми векторами, можно проводить операции
С силами, как и с любыми векторами, можно проводить операции
Проекцией силы на ось называется скалярная величина, равная взятой с соответствующим
Проекцией силы на ось называется скалярная величина, равная взятой с соответствующим
Частные случаи проектирования.
1. Сила образует острый угол с положительным направлением оси
Частные случаи проектирования.
1. Сила образует острый угол с положительным направлением оси
2. Сила перпендикулярна оси (рис.1.13,а). Поскольку в этом случае cos(α)=0, то
2. Сила перпендикулярна оси (рис.1.13,а). Поскольку в этом случае cos(α)=0, то
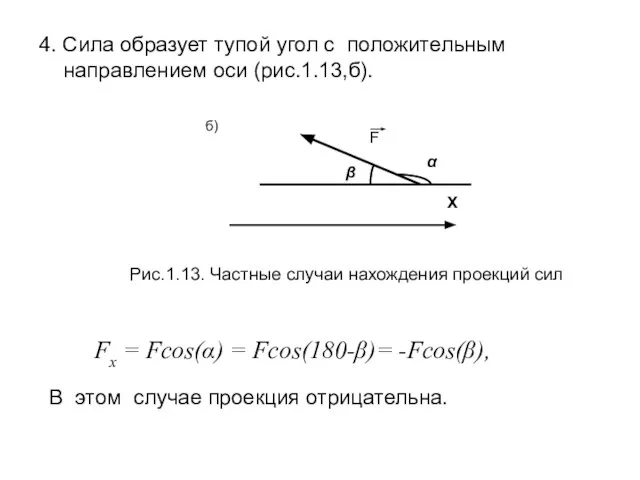
4. Сила образует тупой угол с положительным направлением оси (рис.1.13,б).
Рис.1.13.
4. Сила образует тупой угол с положительным направлением оси (рис.1.13,б).
Рис.1.13.
Так как
, а
, то
(1.2)
Рис.1.14. Разложение силы по осям координат
Зная
Так как
, а
, то
(1.2)
Рис.1.14. Разложение силы по осям координат
Зная
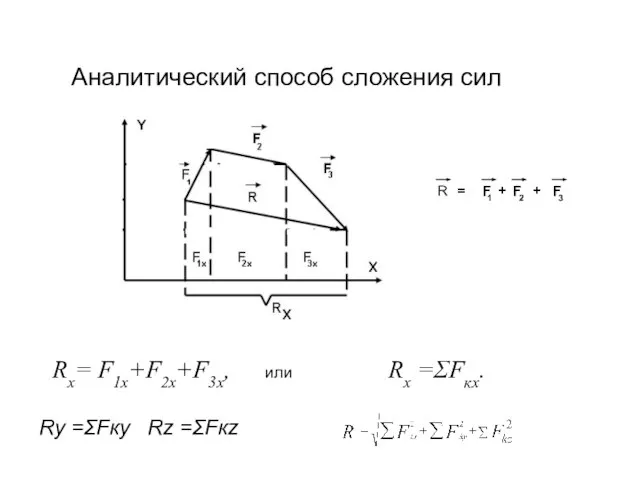
Аналитический способ сложения сил
Rx= F1x+F2x+F3x,
или Rх =ΣFкх.
R
=
F
1
+
F
2
+
F
3
Ry =ΣFкy Rz
Аналитический способ сложения сил
Rx= F1x+F2x+F3x,
или Rх =ΣFкх.
R
=
F
1
+
F
2
+
F
3
Ry =ΣFкy Rz
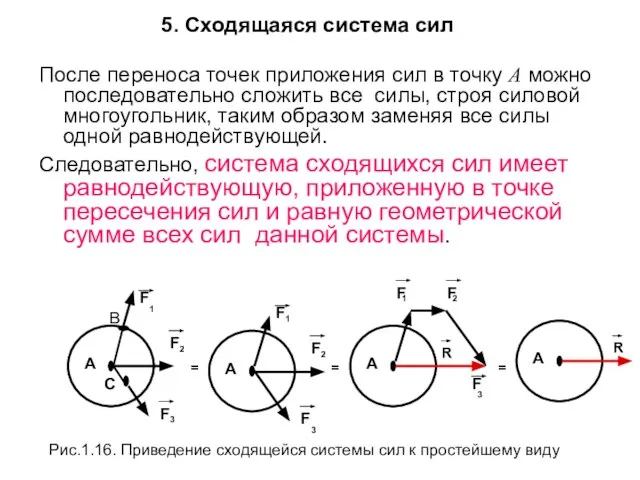
5. Сходящаяся система сил
После переноса точек приложения сил в точку
5. Сходящаяся система сил
После переноса точек приложения сил в точку
Вторая задача статики - разработка условий равновесия.
Они могут быть получены
Вторая задача статики - разработка условий равновесия.
Они могут быть получены
Выражения (1.4,а) являются уравнениями равновесия сходящейся системы сил: система сил находится
Выражения (1.4,а) являются уравнениями равновесия сходящейся системы сил: система сил находится
Лекция 2
Плоская произвольная система сип
Это система сил, как угодно расположенных в
Лекция 2
Плоская произвольная система сип
Это система сил, как угодно расположенных в
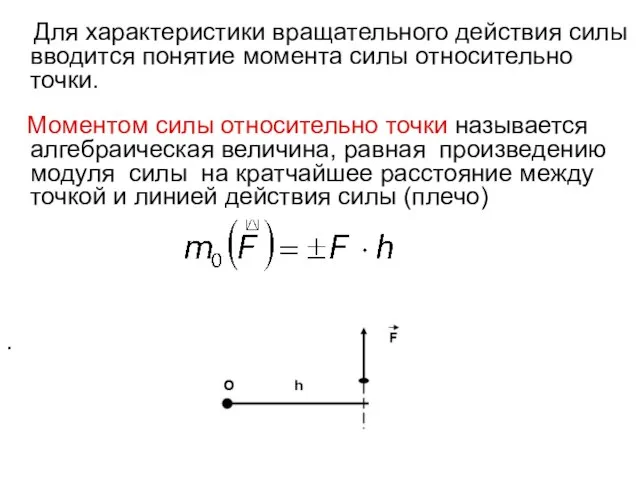
Для характеристики вращательного действия силы вводится понятие момента силы относительно
Для характеристики вращательного действия силы вводится понятие момента силы относительно
Знак момента определяется следующим образом: если сила стремится повернуть тело
Знак момента определяется следующим образом: если сила стремится повернуть тело
Теорема Вариньона:
момент равнодействующей плоской системы сил относительно точки равен
Теорема Вариньона:
момент равнодействующей плоской системы сил относительно точки равен
Пара сил и ее свойства
Парой сил называется система, состоящая из
Пара сил и ее свойства
Парой сил называется система, состоящая из
Моментом пары называется алгебраическая величина, модуль которой равен произведению одной из
Моментом пары называется алгебраическая величина, модуль которой равен произведению одной из
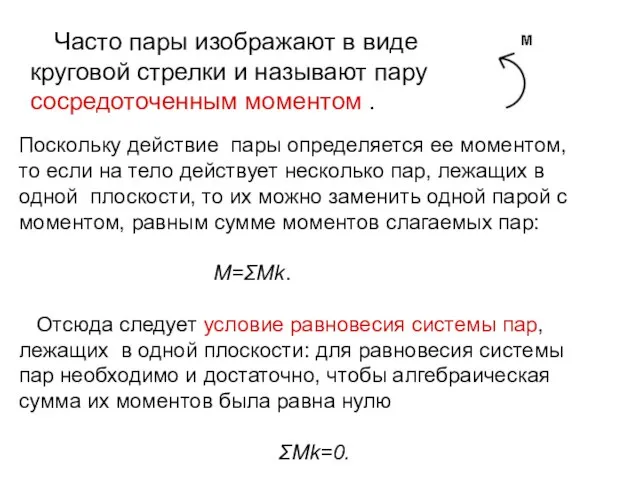
Часто пары изображают в виде круговой стрелки и называют пару
Часто пары изображают в виде круговой стрелки и называют пару
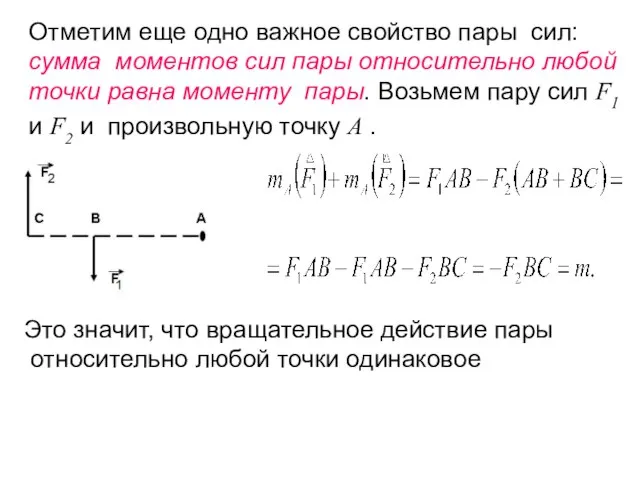
Это значит, что вращательное действие пары
относительно любой точки одинаковое
Отметим еще
Это значит, что вращательное действие пары
относительно любой точки одинаковое
Отметим еще
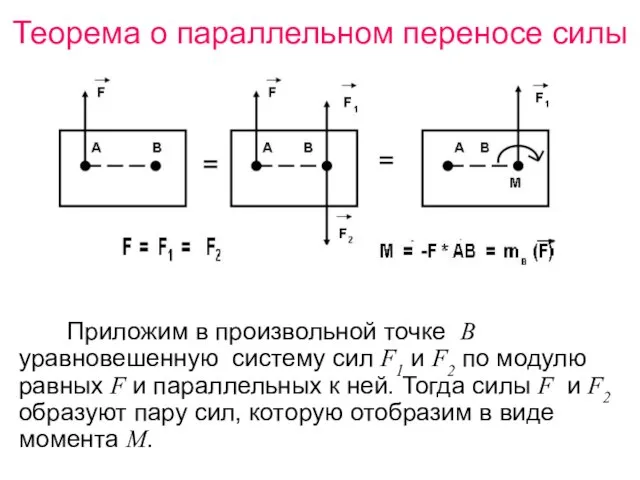
Теорема о параллельном переносе силы
Приложим в произвольной точке В уравновешенную
Теорема о параллельном переносе силы
Приложим в произвольной точке В уравновешенную
В результате имеем систему, состоящую из силы F, приложенной в
В результате имеем систему, состоящую из силы F, приложенной в
Приведение плоской системы сил к простейшему виду
Теорема о параллельном переносе
Приведение плоской системы сил к простейшему виду
Теорема о параллельном переносе
Выберем произвольную точку О, которая называется центром приведения, и, используя
Выберем произвольную точку О, которая называется центром приведения, и, используя
Отсюда следует, что данная система будет находиться в равновесии, если
Отсюда следует, что данная система будет находиться в равновесии, если
Опорные устройства балок
Балкой называется тело, размерами сечения которого по сравнению с
Опорные устройства балок
Балкой называется тело, размерами сечения которого по сравнению с
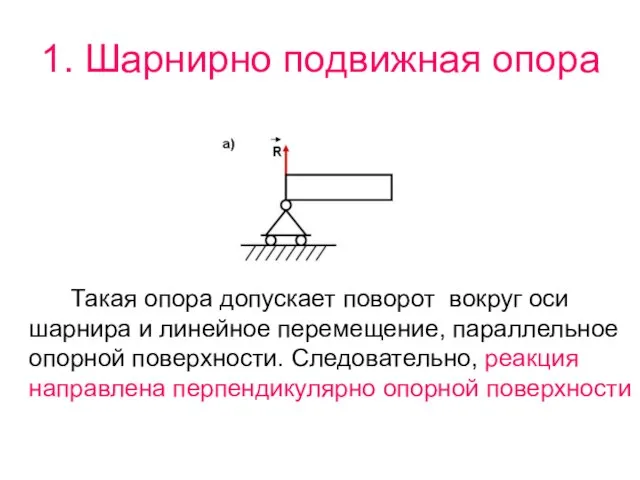
1. Шарнирно подвижная опора
Такая опора допускает поворот вокруг оси
1. Шарнирно подвижная опора
Такая опора допускает поворот вокруг оси
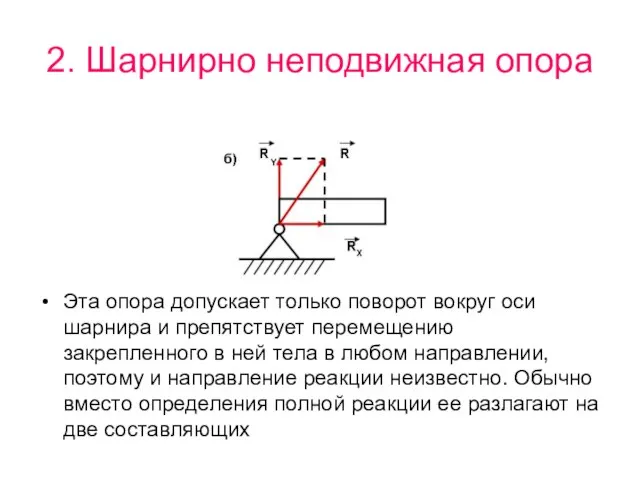
2. Шарнирно неподвижная опора
Эта опора допускает только поворот вокруг оси шарнира
2. Шарнирно неподвижная опора
Эта опора допускает только поворот вокруг оси шарнира
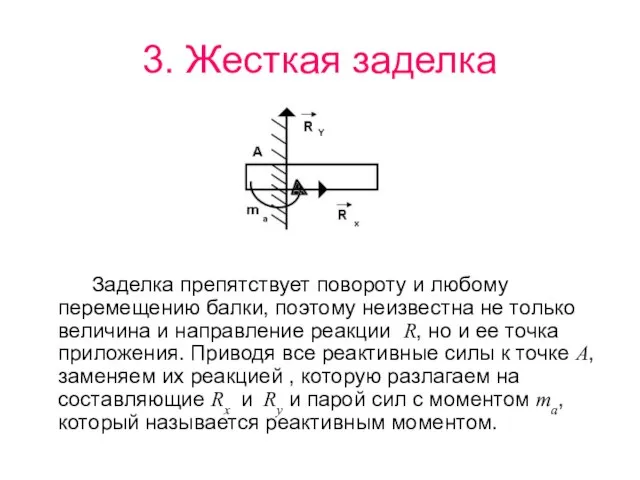
3. Жесткая заделка
Заделка препятствует повороту и любому перемещению балки, поэтому
3. Жесткая заделка
Заделка препятствует повороту и любому перемещению балки, поэтому
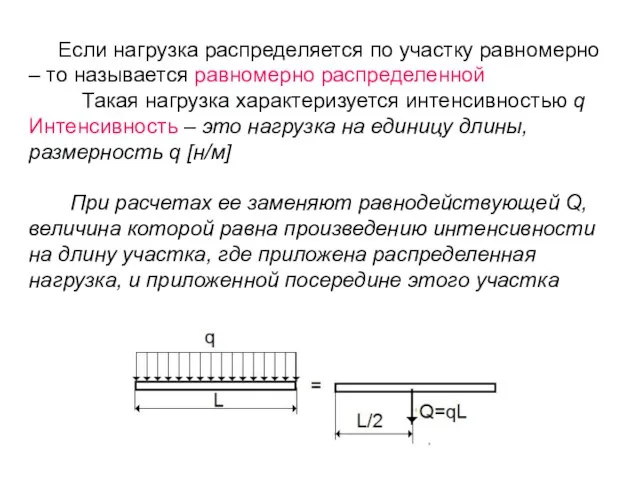
Если нагрузка распределяется по участку равномерно – то называется равномерно
Если нагрузка распределяется по участку равномерно – то называется равномерно
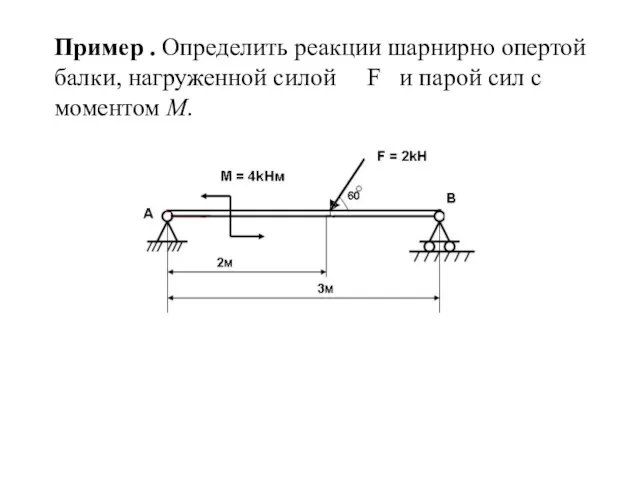
Пример . Определить реакции шарнирно опертой балки, нагруженной силой F и
Пример . Определить реакции шарнирно опертой балки, нагруженной силой F и
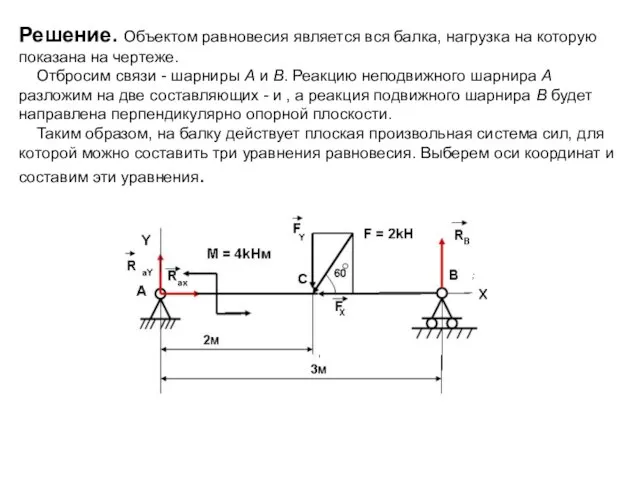
Решение. Объектом равновесия является вся балка, нагрузка на которую показана на
Решение. Объектом равновесия является вся балка, нагрузка на которую показана на
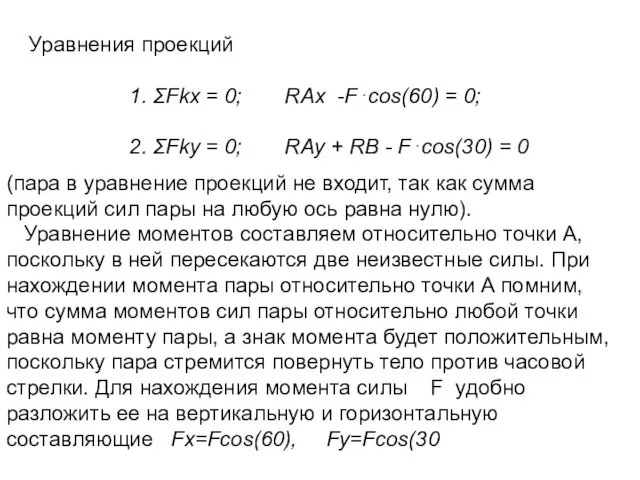
Уравнения проекций
1. ΣFkx = 0; RAx -F⋅cos(60) = 0;
2. ΣFky
Уравнения проекций
1. ΣFkx = 0; RAx -F⋅cos(60) = 0;
2. ΣFky
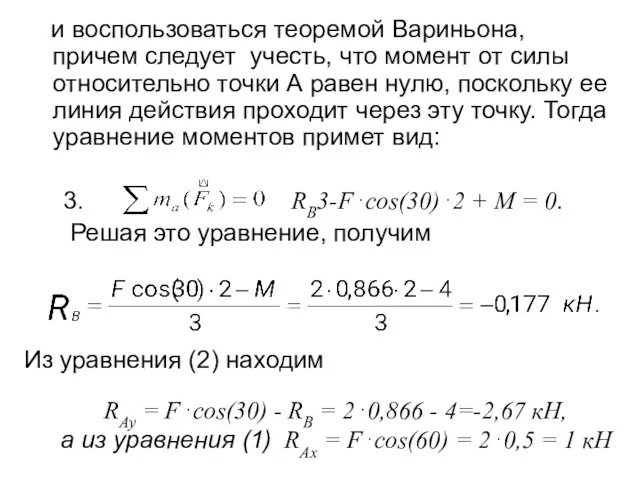
и воспользоваться теоремой Вариньона, причем следует учесть, что момент от
и воспользоваться теоремой Вариньона, причем следует учесть, что момент от
Расчет составных конструкций
Твердые тела, равновесие которых рассматривается в статике, являются моделями
Расчет составных конструкций
Твердые тела, равновесие которых рассматривается в статике, являются моделями
Пример. Определить реакции жестко защемленной балки длиной 3 м, нагруженной
Пример. Определить реакции жестко защемленной балки длиной 3 м, нагруженной

Решение. Заменим равномерно распределенную нагрузку ее равнодействующей Q = 3⋅q =
Решение. Заменим равномерно распределенную нагрузку ее равнодействующей Q = 3⋅q =
Расчет составных конструкций
Твердые тела, равновесие которых рассматривается в статике, являются моделями
Расчет составных конструкций
Твердые тела, равновесие которых рассматривается в статике, являются моделями
Если отбросить внешние связи – шарниры А и В , то
Если отбросить внешние связи – шарниры А и В , то
Так как на конструкцию действует плоская произвольная система сил, то
Так как на конструкцию действует плоская произвольная система сил, то
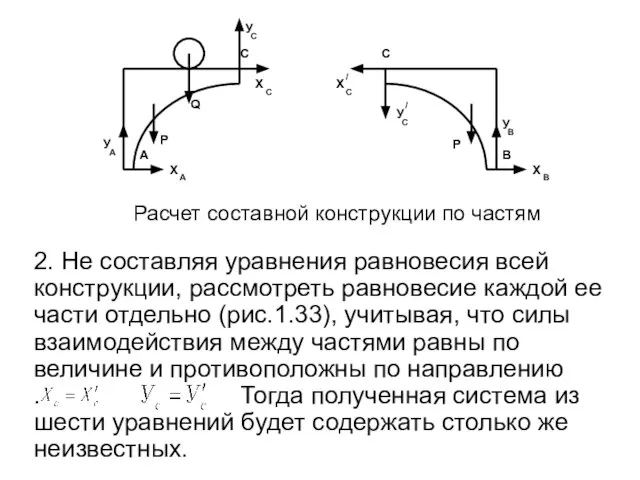
Расчет составной конструкции по частям
2. Не составляя уравнения равновесия всей
Расчет составной конструкции по частям
2. Не составляя уравнения равновесия всей

Фермой называется конструкция, состоящая из стержней, соединенных шарнирами .
Места соединения
Фермой называется конструкция, состоящая из стержней, соединенных шарнирами .
Места соединения
Для плоских статически определимых ферм число стержней S и число
Для плоских статически определимых ферм число стержней S и число
1. Метод вырезания узлов. Рассматривается равновесие каждого узла начиная
1. Метод вырезания узлов. Рассматривается равновесие каждого узла начиная

Пример. Найти усилия в стержнях фермы (рис.1.36), если Р1=Р2=2 кН, F=1
Пример. Найти усилия в стержнях фермы (рис.1.36), если Р1=Р2=2 кН, F=1
Решение. Составляя уравнения равновесия плоской системы сил, приложенной к ферме, находим
Решение. Составляя уравнения равновесия плоской системы сил, приложенной к ферме, находим
Знак «минус» означает, что стержень 1 сжат.
Затем можно последовательно
Знак «минус» означает, что стержень 1 сжат.
Затем можно последовательно
Рассмотрим тело, находящееся в равновесии на горизонтальной шероховатой поверхности .
Рассмотрим тело, находящееся в равновесии на горизонтальной шероховатой поверхности .
При приложении небольшой сдвигающей нагрузки в месте контакта поверхностей возникает сила
При приложении небольшой сдвигающей нагрузки в месте контакта поверхностей возникает сила
Существуют различные теории сил сцепления и трения. Наиболее простой и распространенной
Существуют различные теории сил сцепления и трения. Наиболее простой и распространенной
3. Сила трения при скольжении меньше максимальной силы сцепления.
Величина коэффициентов сцепления
3. Сила трения при скольжении меньше максимальной силы сцепления.
Величина коэффициентов сцепления
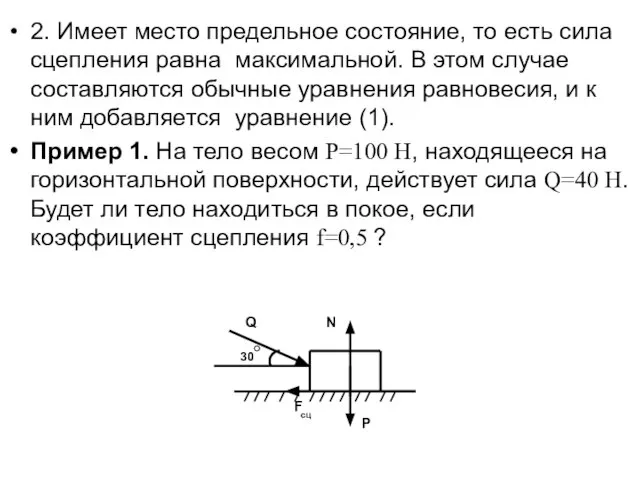
2. Имеет место предельное состояние, то есть сила сцепления равна максимальной.
2. Имеет место предельное состояние, то есть сила сцепления равна максимальной.
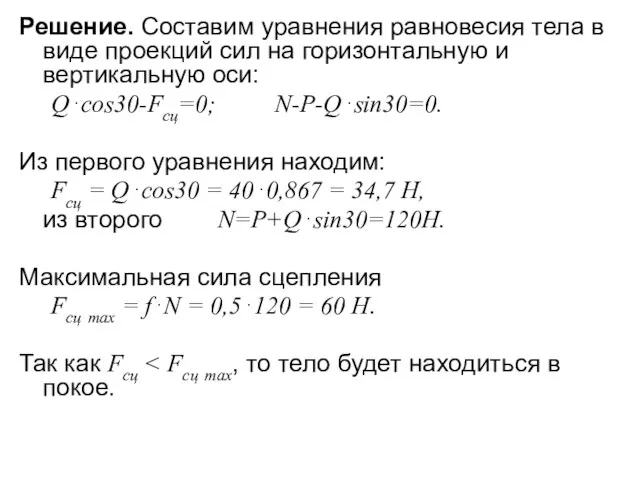
Решение. Составим уравнения равновесия тела в виде проекций сил на горизонтальную
Решение. Составим уравнения равновесия тела в виде проекций сил на горизонтальную
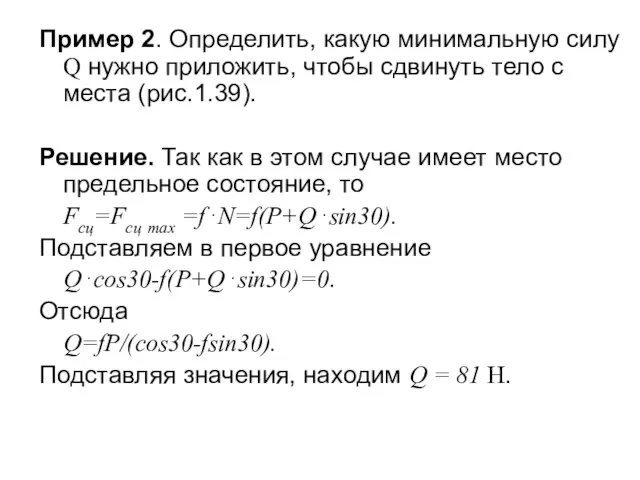
Пример 2. Определить, какую минимальную силу Q нужно приложить, чтобы сдвинуть
Пример 2. Определить, какую минимальную силу Q нужно приложить, чтобы сдвинуть

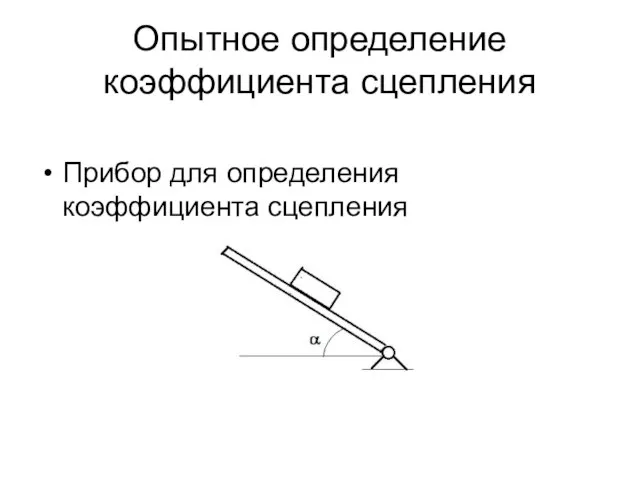
Опытное определение коэффициента сцепления
Прибор для определения коэффициента сцепления
Опытное определение коэффициента сцепления
Прибор для определения коэффициента сцепления
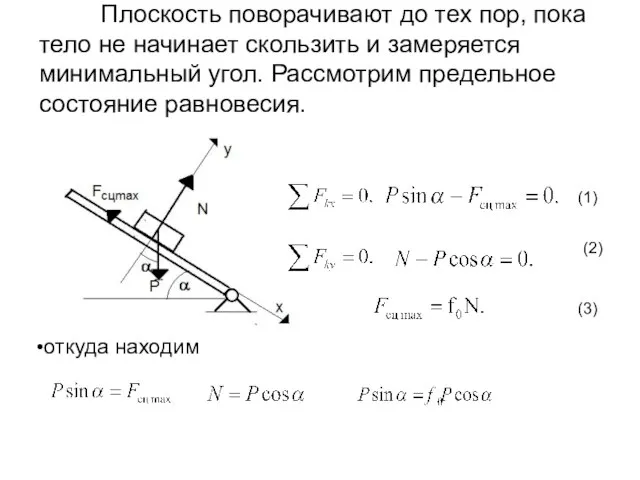
Плоскость поворачивают до тех пор, пока тело не начинает скользить
Плоскость поворачивают до тех пор, пока тело не начинает скользить
Окончательно получим
То есть коэффициент сцепления равен тангенсу минимального угла наклона, при
Окончательно получим
То есть коэффициент сцепления равен тангенсу минимального угла наклона, при
Трение качения
Рассмотрим цилиндрическое тело на абсолютно твердой поверхности. Приложим небольшую силу
Трение качения
Рассмотрим цилиндрическое тело на абсолютно твердой поверхности. Приложим небольшую силу
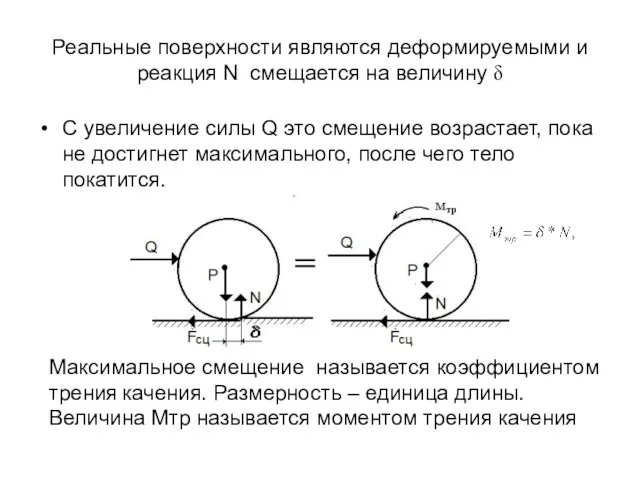
Реальные поверхности являются деформируемыми и реакция N смещается на величину δ
C
Реальные поверхности являются деформируемыми и реакция N смещается на величину δ
C
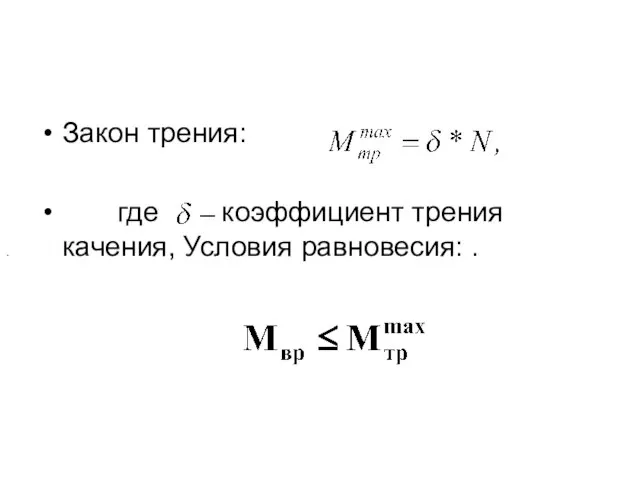
Закон трения:
где коэффициент трения качения, Условия равновесия: .
.
Закон трения:
где коэффициент трения качения, Условия равновесия: .
.
Центр тяжести
Рассмотрим тело, на которое действуют две параллельные силы
Используя теорему о
Центр тяжести
Рассмотрим тело, на которое действуют две параллельные силы
Используя теорему о
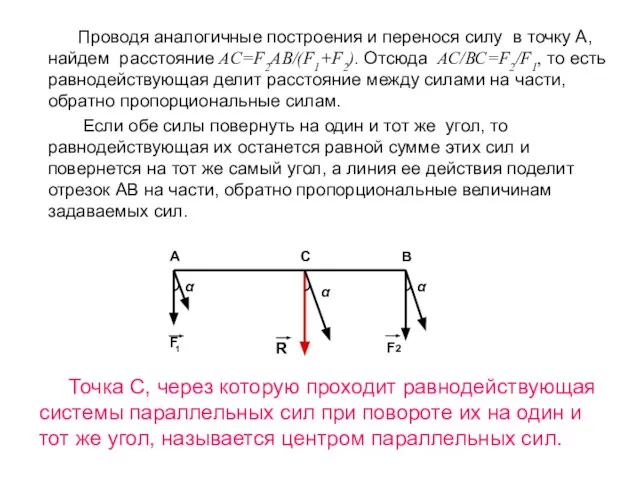
Проводя аналогичные построения и перенося силу в точку А, найдем
Проводя аналогичные построения и перенося силу в точку А, найдем
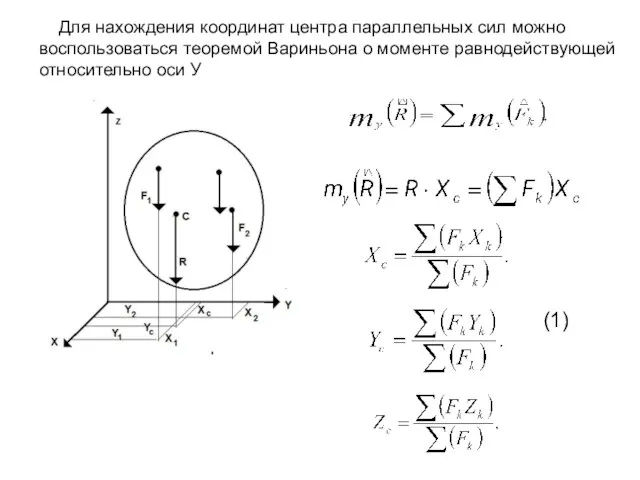
Для нахождения координат центра параллельных сил можно воспользоваться теоремой Вариньона
Для нахождения координат центра параллельных сил можно воспользоваться теоремой Вариньона
Центр тяжести
На тело, находящееся вблизи поверхности Земли действует система параллельных
Центр тяжести
На тело, находящееся вблизи поверхности Земли действует система параллельных
Важной технической задачей при проектировании машин является определение положения центра тяжести.
Для
Для
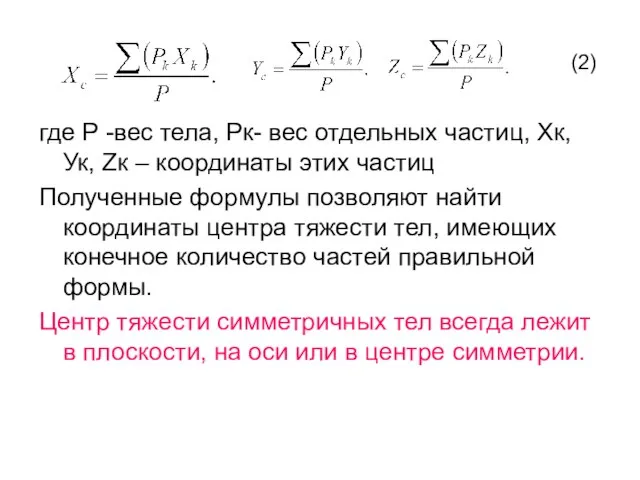
где Р -вес тела, Рк- вес отдельных частиц, Хк, Ук, Zк
где Р -вес тела, Рк- вес отдельных частиц, Хк, Ук, Zк
Для однородного тела его вес, как и вес отдельных частей, можно
Для однородного тела его вес, как и вес отдельных частей, можно
Если однородное тело представляет собой однородную линию, то для него
Если однородное тело представляет собой однородную линию, то для него
Для плоской фигуры координаты центра тяжести найдутся по формулам:
(5)
где
Для плоской фигуры координаты центра тяжести найдутся по формулам:
(5)
где
Методы нахождения центра тяжести
1. Центр тяжести симметричных тел.
То есть центр
Методы нахождения центра тяжести
1. Центр тяжести симметричных тел.
То есть центр
3. Метод дополнения.
Применяется для тел, имеющих вырезы или выемки.
3. Метод дополнения.
Применяется для тел, имеющих вырезы или выемки.
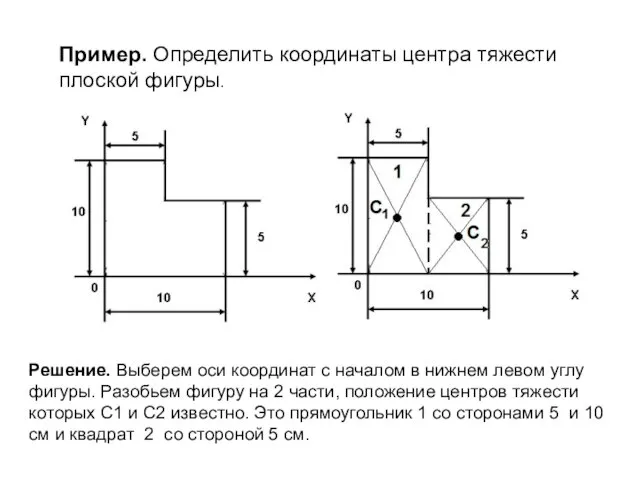
Пример. Определить координаты центра тяжести плоской фигуры.
Решение. Выберем оси координат с
Пример. Определить координаты центра тяжести плоской фигуры.
Решение. Выберем оси координат с
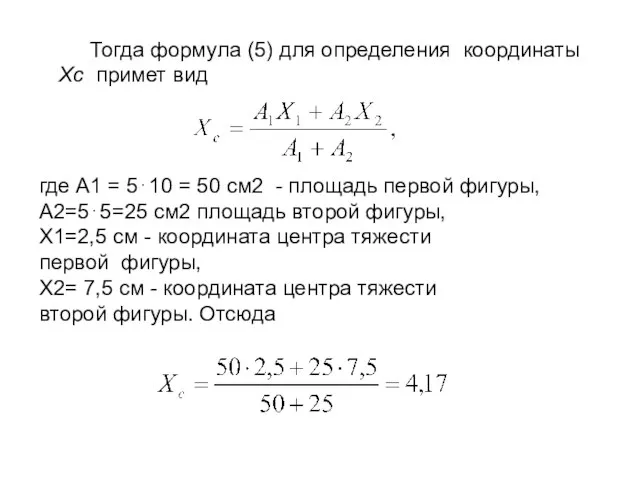
Тогда формула (5) для определения координаты
Хc примет вид
где А1
Тогда формула (5) для определения координаты
Хc примет вид
где А1
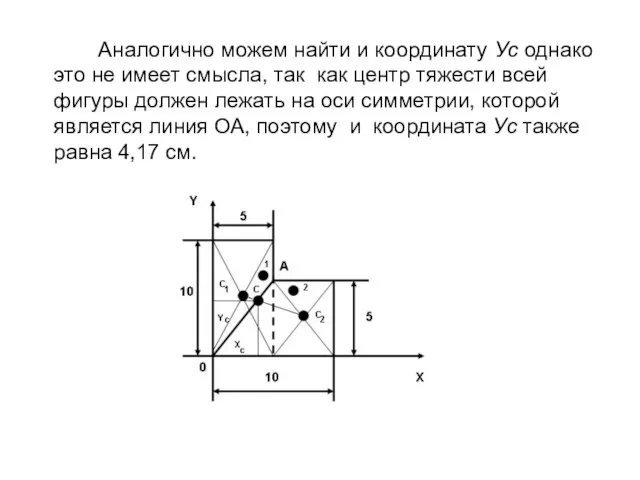
Аналогично можем найти и координату Уc однако это не имеет
Аналогично можем найти и координату Уc однако это не имеет
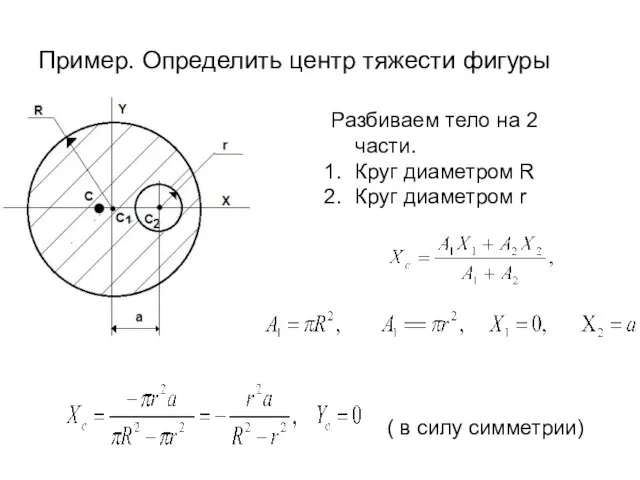
Пример. Определить центр тяжести фигуры
Разбиваем тело на 2 части.
Круг диаметром R
Круг
Пример. Определить центр тяжести фигуры
Разбиваем тело на 2 части.
Круг диаметром R
Круг
 Электромобиль – экологически чистое транспортное средство
Электромобиль – экологически чистое транспортное средство Презентация Распространение света
Презентация Распространение света Муниципальное общеобразовательное учреждение средняя общеобразовательная школа №13 Информация в физике Выполнили:
Муниципальное общеобразовательное учреждение средняя общеобразовательная школа №13 Информация в физике Выполнили:  Для чего на радиаторы автомобилей зимой надевают утеплительный чехол? Для чего на радиаторы автомобилей зимой надевают утеплител
Для чего на радиаторы автомобилей зимой надевают утеплительный чехол? Для чего на радиаторы автомобилей зимой надевают утеплител Магнитное поле. Индукция магнитного поля. Закон Био-Савара-Лапласа. Принцип суперпозиции
Магнитное поле. Индукция магнитного поля. Закон Био-Савара-Лапласа. Принцип суперпозиции Тепломассообмен. Сложный теплообмен
Тепломассообмен. Сложный теплообмен Сила трения, ее роль в природе, технике и повседневной жизни (7 класс)
Сила трения, ее роль в природе, технике и повседневной жизни (7 класс) Презентация по физике на тему Приливы, отливы, их использование
Презентация по физике на тему Приливы, отливы, их использование Исследовательский проект Машина Голдберга Точно в цель!
Исследовательский проект Машина Голдберга Точно в цель! Сила трения. Трение покоя
Сила трения. Трение покоя Простые механизмы
Простые механизмы Теоремы динамики механической системы. Масса механической системы. (Лекция 4)
Теоремы динамики механической системы. Масса механической системы. (Лекция 4) Презентация по физике "Светомузыка" - скачать
Презентация по физике "Светомузыка" - скачать  Источники электроэнергии
Источники электроэнергии Расчет изгибаемых элементов по наклонным сечениям
Расчет изгибаемых элементов по наклонным сечениям Открытие дисперсии и дифракции (оптика второй половины xvii века)
Открытие дисперсии и дифракции (оптика второй половины xvii века) Тест. Что такое прочность?
Тест. Что такое прочность? Статистическая теория радиотехнических систем. Случайные процессы и величины. (Лекция 2)
Статистическая теория радиотехнических систем. Случайные процессы и величины. (Лекция 2) Волновые передачи
Волновые передачи Элементы механики жидкости. Давление в жидкости и газе
Элементы механики жидкости. Давление в жидкости и газе Человек и электричество Автор проекта: Тюрин Евгений ученик 9 класса МОУ ООШ д. Пиштенур Тужинского района, Кировской области. По
Человек и электричество Автор проекта: Тюрин Евгений ученик 9 класса МОУ ООШ д. Пиштенур Тужинского района, Кировской области. По Техническое обслуживание консольно-фрезерный станок 6Р83Ш
Техническое обслуживание консольно-фрезерный станок 6Р83Ш Специальные вопросы электроснабжения. Изоляция и перенапряжения
Специальные вопросы электроснабжения. Изоляция и перенапряжения Масс-спектрометрия
Масс-спектрометрия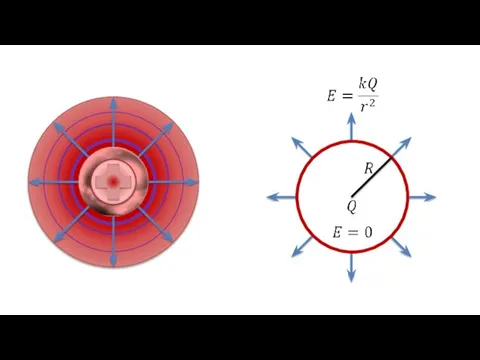 Напряженность заряженного шара
Напряженность заряженного шара Магнитные свойства минералов
Магнитные свойства минералов Технические системы
Технические системы Исследовательский проект на тему ДВС. Инжектор
Исследовательский проект на тему ДВС. Инжектор