- Лекция №2

Содержание
- 2. 1. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА а) Элементы внутреннего ориенитирования (ЭВнО) Рис.1
- 3. Первая система ЭВО фотоснимка: XS,YS,ZS - координаты точки S; ε - угол наклона фотоснимка; t -
- 4. Вторая система ЭВО фотоснимка: XS,YS,ZS - координаты точки S; α – продольный угол наклона фотоснимка; ω
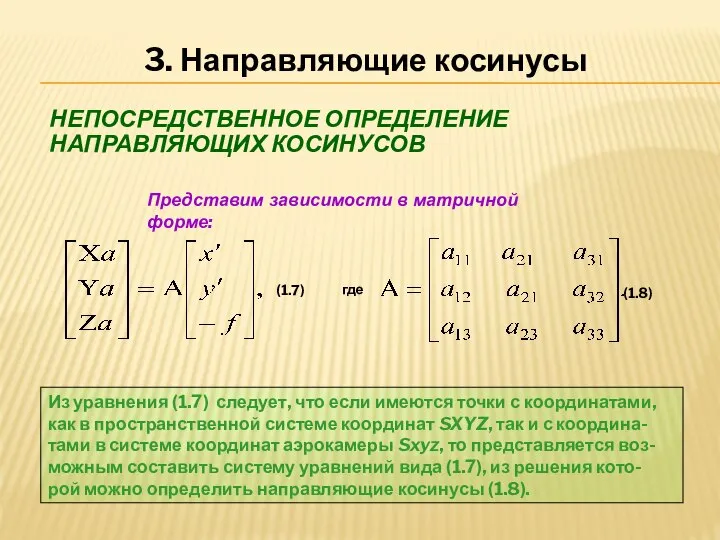
- 5. НЕПОСРЕДСТВЕННОЕ ОПРЕДЕЛЕНИЕ НАПРАВЛЯЮЩИХ КОСИНУСОВ Из уравнения (1.7) следует, что если имеются точки с координатами, как в
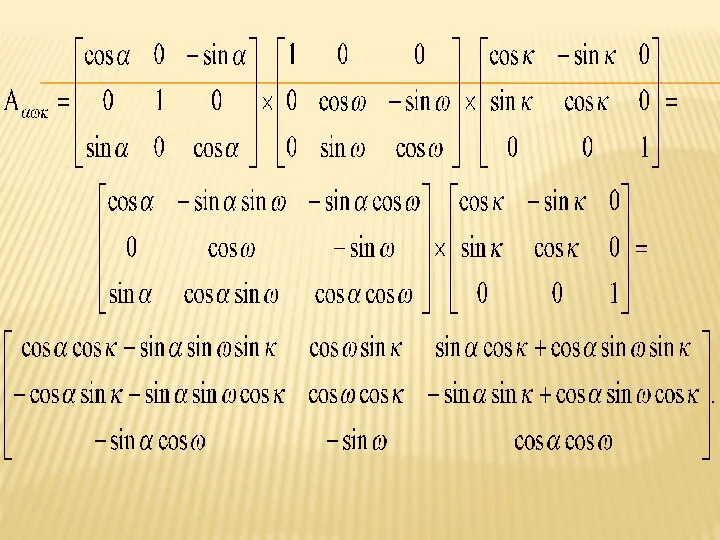
- 6. Левый поворот на угол α, правый поворот на угол ω и правый поворот на угол κ.
- 8. Из сравнения зависимости (1.8) и полученного произве-дения Аαωκ следует, что направляющие косинусы равны:
- 9. Положение фотоснимка и его центра проекции определяется ЭО: ЭВнО и ЭВО фотоснимка. ЭВнО определяют в процессе
- 10. 1. ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА. О Рис.4
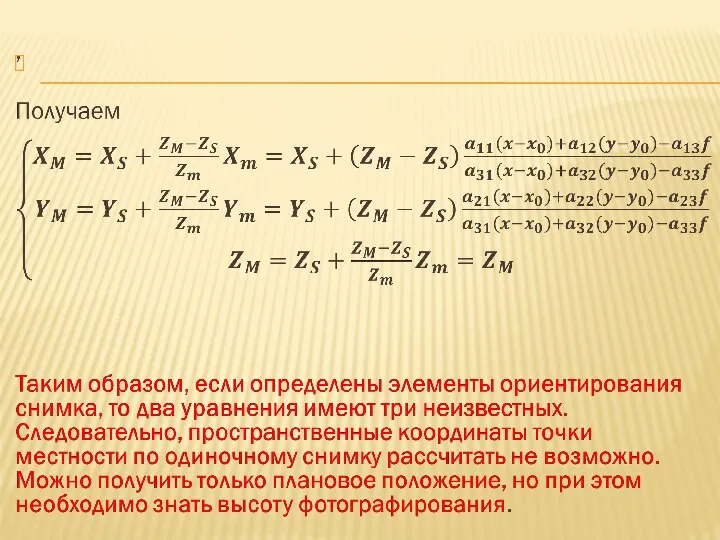
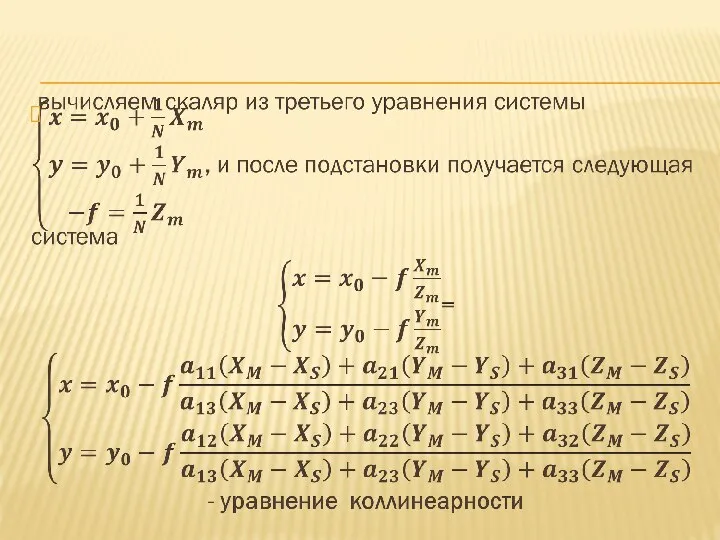
- 13. ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА (УРАВНЕНИЕ КОЛЛИНЕАРНОСТИ) Рис.5
- 16. СНИМОК ГОРИЗОНТАЛЬНЫЙ
- 18. 3. ЗАВИСИМОСТИ МЕЖДУ КООРДИНАТАМИ ТОЧЕК НАКЛОННОГО И ГОРИЗОНТАЛЬНОГО СНИМКОВ. Фотограмметрические задачи решаются наиболее просто по горизонтальным
- 19. Виды трансформирования: аналитический; фотомеханический; оптико-графический; цифровой. Аналитический способ предполагает трансформирование отдельных точек фотоснимка. Для этого по
- 20. Фотомеханический способ трансформирования предполагает использование специальных приборов – фототрансформаторов Следует добавить, что для завершения процесса необходимо
- 21. Цифровой способ трансформирования можно рассматривать как разновидность аналитического трансформирования. Однако в отличие от рассмотренного выше аналитического
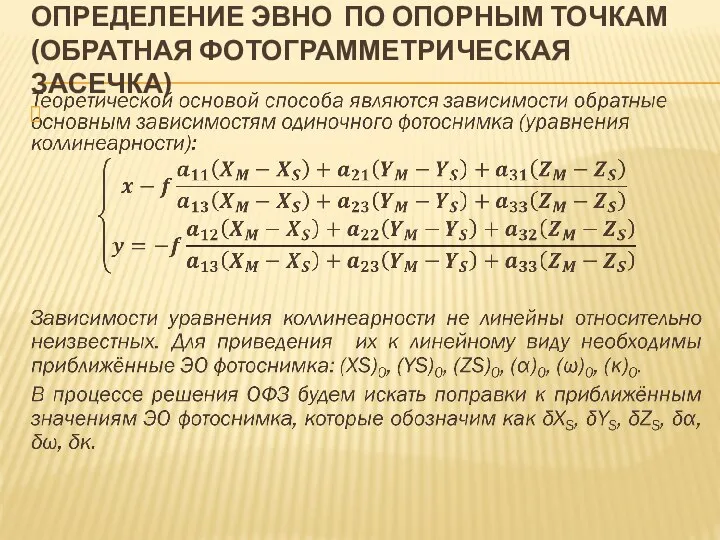
- 22. ОПРЕДЕЛЕНИЕ ЭВНО ПО ОПОРНЫМ ТОЧКАМ (ОБРАТНАЯ ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА)
- 23. Для приведения уравнений коллинеарности к линейному виду, разложим их в ряд Тейлора и сохраним при этом
- 24. ТЕХНОЛОГИЯ РЕШЕНИЯ ОФЗ выбирают опорные точки, учитывая при этом, что они должны равномерно располагаться по площади
- 26. Скачать презентацию
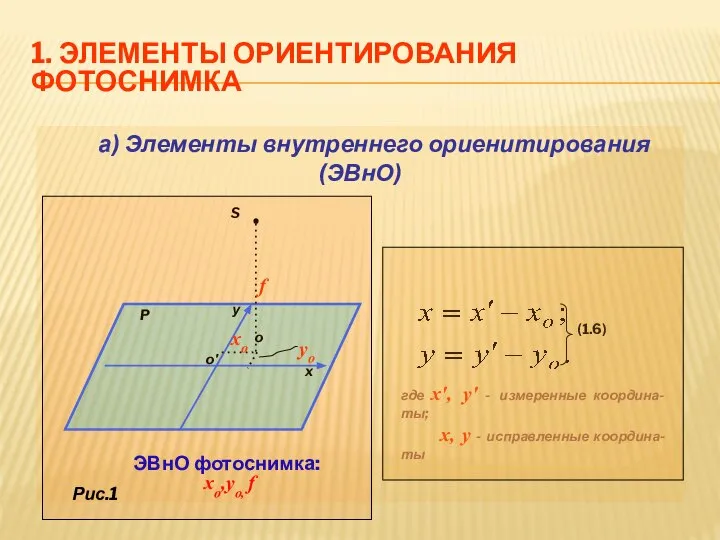
1. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА
а) Элементы внутреннего ориенитирования (ЭВнО)
Рис.1
1. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ ФОТОСНИМКА
а) Элементы внутреннего ориенитирования (ЭВнО)
Рис.1
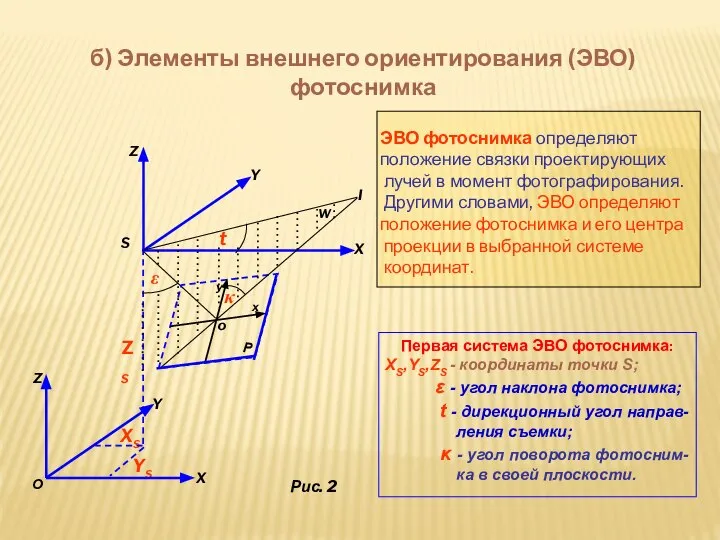
Первая система ЭВО фотоснимка:
XS,YS,ZS - координаты точки S;
ε - угол наклона
Первая система ЭВО фотоснимка:
XS,YS,ZS - координаты точки S;
ε - угол наклона
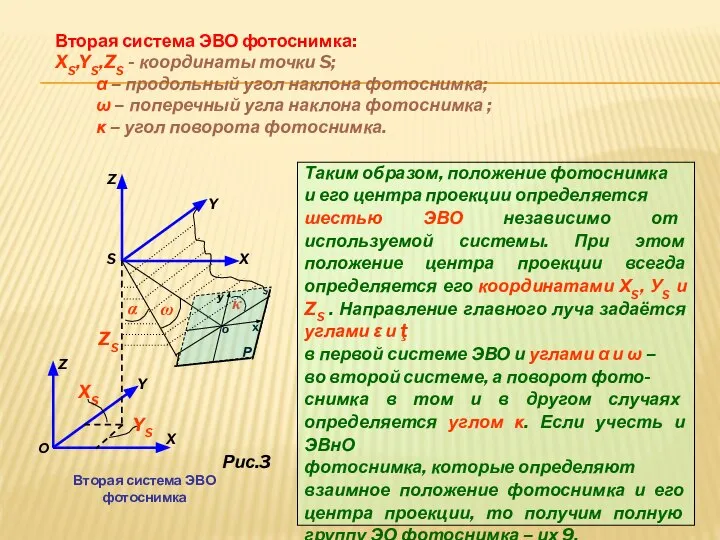
Вторая система ЭВО фотоснимка:
XS,YS,ZS - координаты точки S;
α – продольный
Вторая система ЭВО фотоснимка:
XS,YS,ZS - координаты точки S;
α – продольный
НЕПОСРЕДСТВЕННОЕ ОПРЕДЕЛЕНИЕ НАПРАВЛЯЮЩИХ КОСИНУСОВ
Из уравнения (1.7) следует, что если имеются
НЕПОСРЕДСТВЕННОЕ ОПРЕДЕЛЕНИЕ НАПРАВЛЯЮЩИХ КОСИНУСОВ
Из уравнения (1.7) следует, что если имеются
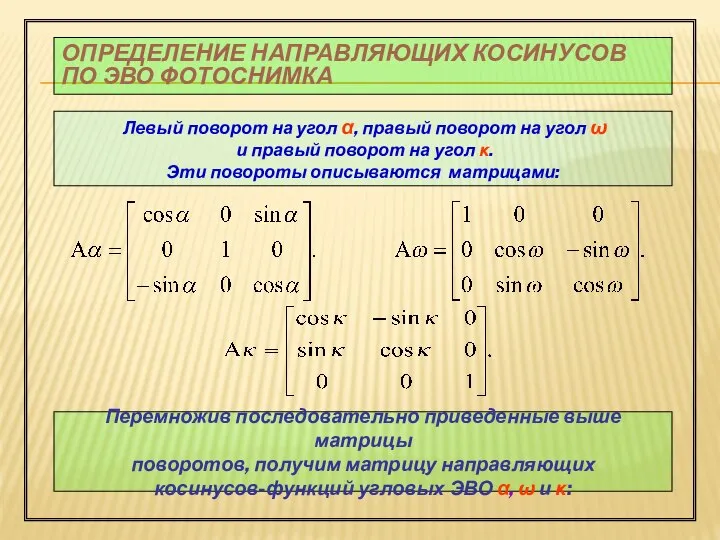
Левый поворот на угол α, правый поворот на угол ω
Левый поворот на угол α, правый поворот на угол ω
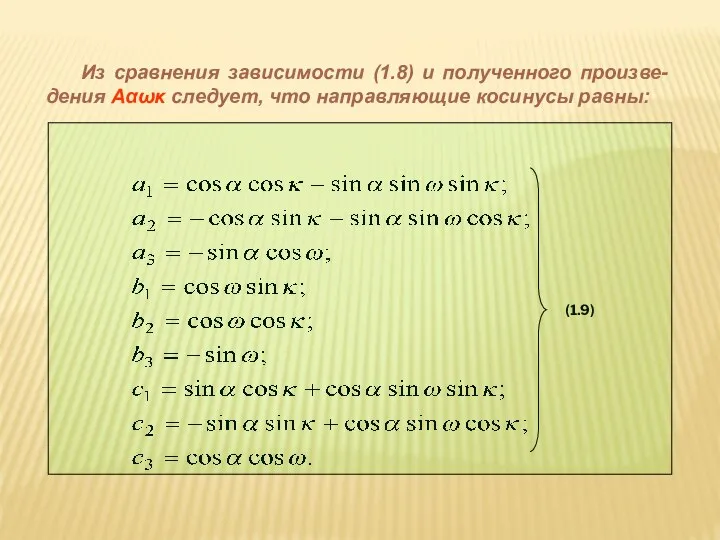
Из сравнения зависимости (1.8) и полученного произве-дения Аαωκ следует, что направляющие
Положение фотоснимка и его центра проекции определяется ЭО: ЭВнО и ЭВО
Положение фотоснимка и его центра проекции определяется ЭО: ЭВнО и ЭВО
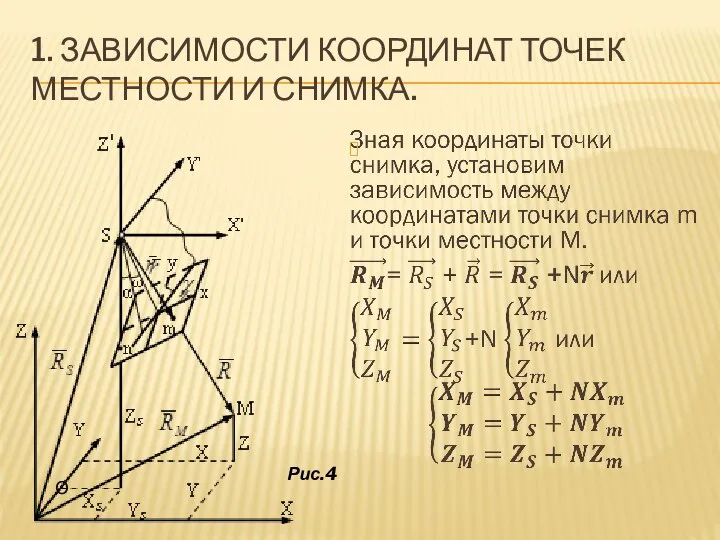
1. ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА.
О
Рис.4
1. ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И СНИМКА.
О
Рис.4

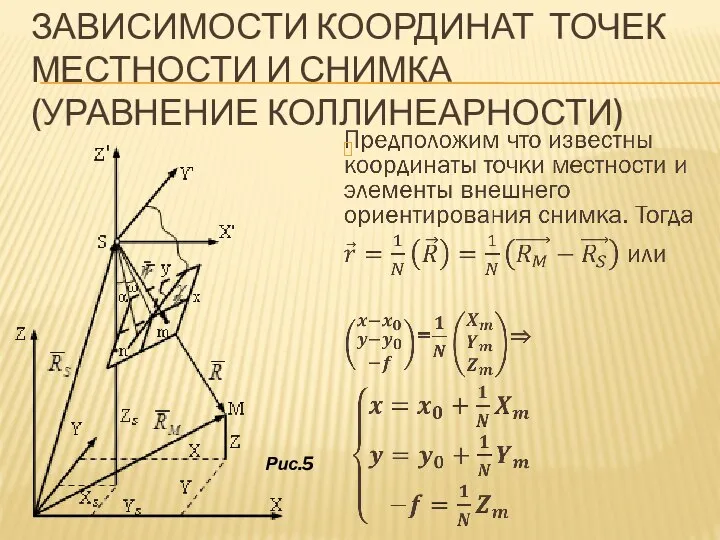
ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК
МЕСТНОСТИ И СНИМКА
(УРАВНЕНИЕ КОЛЛИНЕАРНОСТИ)
Рис.5
ЗАВИСИМОСТИ КООРДИНАТ ТОЧЕК
МЕСТНОСТИ И СНИМКА
(УРАВНЕНИЕ КОЛЛИНЕАРНОСТИ)
Рис.5
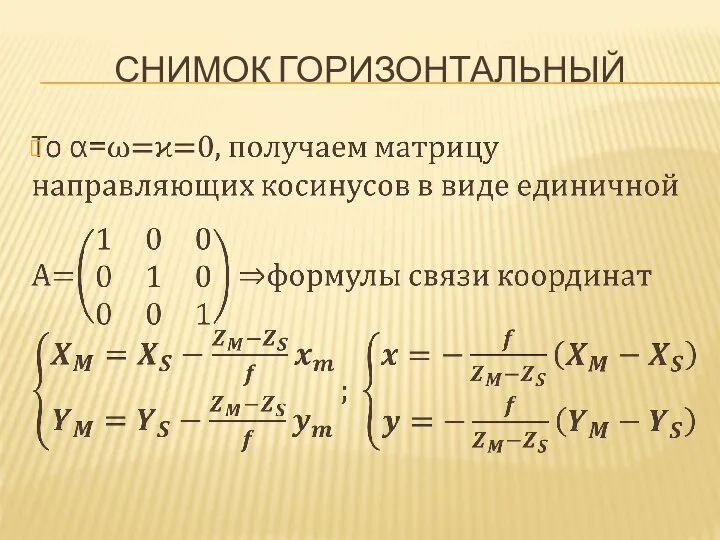
СНИМОК ГОРИЗОНТАЛЬНЫЙ
СНИМОК ГОРИЗОНТАЛЬНЫЙ

3. ЗАВИСИМОСТИ МЕЖДУ КООРДИНАТАМИ ТОЧЕК НАКЛОННОГО И ГОРИЗОНТАЛЬНОГО СНИМКОВ.
Фотограмметрические задачи решаются
3. ЗАВИСИМОСТИ МЕЖДУ КООРДИНАТАМИ ТОЧЕК НАКЛОННОГО И ГОРИЗОНТАЛЬНОГО СНИМКОВ.
Фотограмметрические задачи решаются
Виды трансформирования:
аналитический;
фотомеханический;
оптико-графический;
цифровой.
Аналитический способ предполагает трансформирование отдельных точек фотоснимка. Для
Виды трансформирования:
аналитический;
фотомеханический;
оптико-графический;
цифровой.
Аналитический способ предполагает трансформирование отдельных точек фотоснимка. Для
Фотомеханический способ трансформирования предполагает использование специальных приборов – фототрансформаторов
Следует добавить,
Фотомеханический способ трансформирования предполагает использование специальных приборов – фототрансформаторов
Следует добавить,
Цифровой способ трансформирования можно рассматривать как разновидность аналитического трансформирования. Однако в
Цифровой способ трансформирования можно рассматривать как разновидность аналитического трансформирования. Однако в
ОПРЕДЕЛЕНИЕ ЭВНО ПО ОПОРНЫМ ТОЧКАМ
(ОБРАТНАЯ ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА)
ОПРЕДЕЛЕНИЕ ЭВНО ПО ОПОРНЫМ ТОЧКАМ
(ОБРАТНАЯ ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА)

Для приведения уравнений коллинеарности к линейному виду, разложим их в ряд
Для приведения уравнений коллинеарности к линейному виду, разложим их в ряд
ТЕХНОЛОГИЯ РЕШЕНИЯ ОФЗ
выбирают опорные точки, учитывая при этом, что они
ТЕХНОЛОГИЯ РЕШЕНИЯ ОФЗ
выбирают опорные точки, учитывая при этом, что они
 Долина гейзеров
Долина гейзеров Агроклиматические ресурсы Казахстана
Агроклиматические ресурсы Казахстана Рельеф Земли. История формирования рельефа Земли
Рельеф Земли. История формирования рельефа Земли Внутренние воды Северной Америки
Внутренние воды Северной Америки Мировые религии - презентация к уроку Географии
Мировые религии - презентация к уроку Географии Энергетическая проблема человечества
Энергетическая проблема человечества Материк Австралия. Географический диктант
Материк Австралия. Географический диктант Знатоки географии. Турнир
Знатоки географии. Турнир Животный мир степей России. Подготовил: Ученик 3 класса 2012-2013учебный год. Чесноков Иван
Животный мир степей России. Подготовил: Ученик 3 класса 2012-2013учебный год. Чесноков Иван Мы наследники барабинских татар - презентация к уроку Географии_
Мы наследники барабинских татар - презентация к уроку Географии_ Центрально – Черноземный район Выполнил ученик 9 класса Пивоваров Д.
Центрально – Черноземный район Выполнил ученик 9 класса Пивоваров Д. Озёра Земли
Озёра Земли Мексика - презентация к уроку Географии_
Мексика - презентация к уроку Географии_ Презентация на тему Триасовый континент
Презентация на тему Триасовый континент  Сингапур. Экономико-географическое положение
Сингапур. Экономико-географическое положение Республика Сербия
Республика Сербия Геологическая деятельность морей и океанов
Геологическая деятельность морей и океанов Предметы, которые не стоит выбрасывать в мусорное ведро - презентация к уроку Географии
Предметы, которые не стоит выбрасывать в мусорное ведро - презентация к уроку Географии Пекин – столица поднебесной
Пекин – столица поднебесной Открытия русских путешественников
Открытия русских путешественников Движение атмосферы
Движение атмосферы Пустыня
Пустыня Интерпретация бинарных диаграмм. Диаграмма Ti/Y-Nb/Y
Интерпретация бинарных диаграмм. Диаграмма Ti/Y-Nb/Y Маршрут наметил Ломоносов. Схемы морских течений в Северном Ледовитом океане
Маршрут наметил Ломоносов. Схемы морских течений в Северном Ледовитом океане ГОРЛОВО История нашего села
ГОРЛОВО История нашего села Географическое лото - презентация к уроку Географии_
Географическое лото - презентация к уроку Географии_ Конкурс «Интерактивная мозаика» 2013
Конкурс «Интерактивная мозаика» 2013  Обвалы, оползни. Осыпи. Карст, суффозия. Овраги
Обвалы, оползни. Осыпи. Карст, суффозия. Овраги