- Исследование линейной системы управления робота

Содержание
- 2. Содержание работы Цель и содержание работы. Пример выполнения работы. Варианты заданий. Контрольные вопросы. Проектирование систем управления
- 3. Цель и содержание работы Целью работы является исследование линейной системы управления роботом, заданным нелинейными уравнениями. В
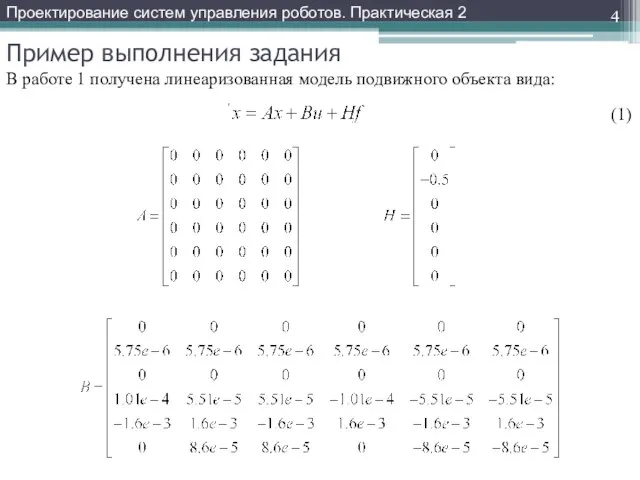
- 4. Пример выполнения задания Проектирование систем управления роботов. Практическая 2 В работе 1 получена линеаризованная модель подвижного
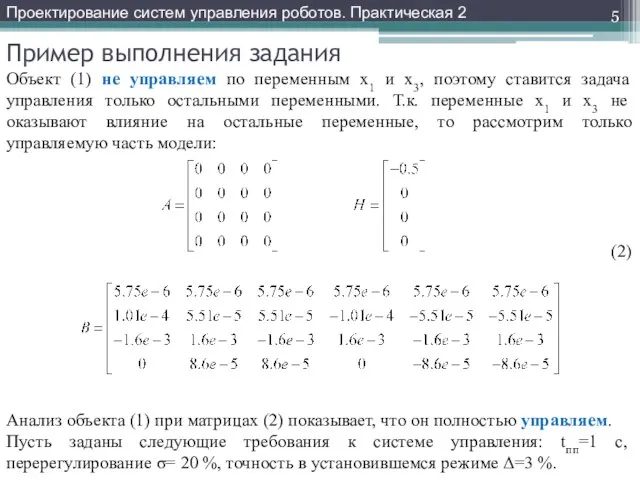
- 5. Пример выполнения задания Проектирование систем управления роботов. Практическая 2 Объект (1) не управляем по переменным x1
- 6. Пример выполнения задания Проектирование систем управления роботов. Практическая 2 Для наглядности обозначим: Тогда окончательно запишем матрицы
- 7. Пример выполнения задания Так как перерегулирование σ= 20 %, то выбираем фильтр Баттерворта 4-го порядка. Из
- 8. Пример выполнения задания На рис. 2 показан переходный процесс и линии, определяющие максимальную погрешность 3 %.
- 9. Пример выполнения задания Структура управления имеет вид Проектирование систем управления роботов. Практическая 2 (5) Подставим (5)
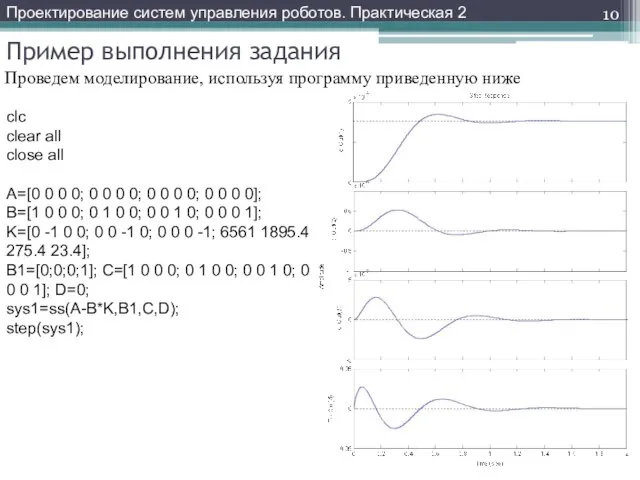
- 10. Пример выполнения задания Проведем моделирование, используя программу приведенную ниже Проектирование систем управления роботов. Практическая 2 clc
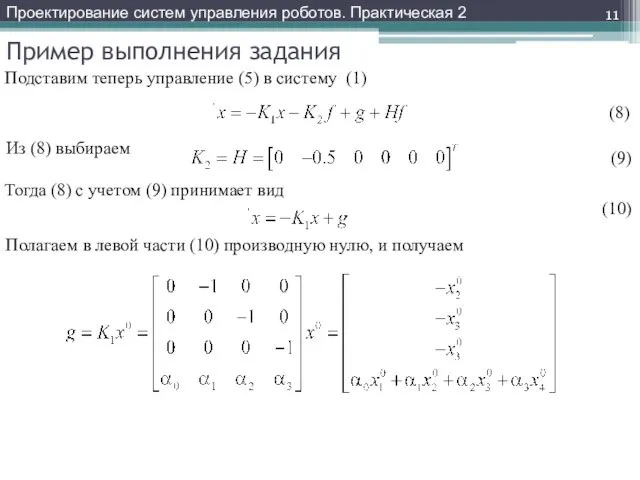
- 11. Пример выполнения задания Подставим теперь управление (5) в систему (1) Проектирование систем управления роботов. Практическая 2
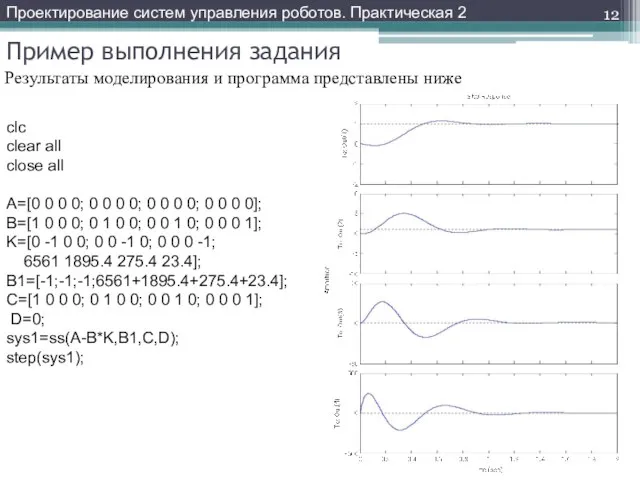
- 12. Пример выполнения задания Результаты моделирования и программа представлены ниже Проектирование систем управления роботов. Практическая 2 clc
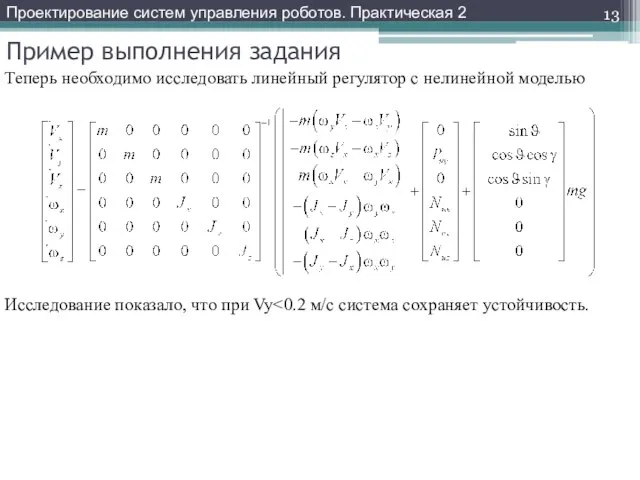
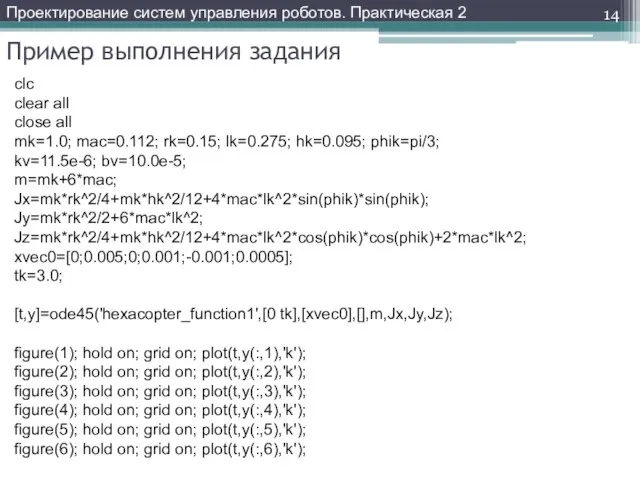
- 13. Пример выполнения задания Теперь необходимо исследовать линейный регулятор с нелинейной моделью Проектирование систем управления роботов. Практическая
- 14. Пример выполнения задания Проектирование систем управления роботов. Практическая 2 clc clear all close all mk=1.0; mac=0.112;
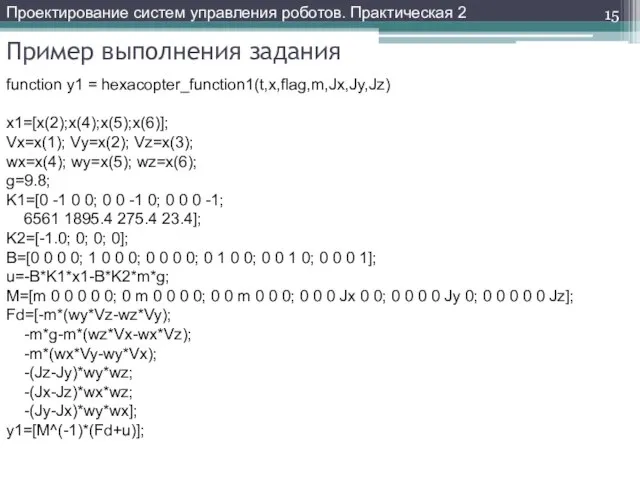
- 15. Пример выполнения задания Проектирование систем управления роботов. Практическая 2 function y1 = hexacopter_function1(t,x,flag,m,Jx,Jy,Jz) x1=[x(2);x(4);x(5);x(6)]; Vx=x(1); Vy=x(2);
- 17. Скачать презентацию
Содержание работы
Цель и содержание работы.
Пример выполнения работы.
Варианты заданий.
Контрольные вопросы.
Проектирование систем управления
Содержание работы
Цель и содержание работы.
Пример выполнения работы.
Варианты заданий.
Контрольные вопросы.
Проектирование систем управления
Цель и содержание работы
Целью работы является исследование линейной системы управления роботом,
Цель и содержание работы
Целью работы является исследование линейной системы управления роботом,
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
В работе 1 получена
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
В работе 1 получена
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
Объект (1) не управляем
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
Объект (1) не управляем
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
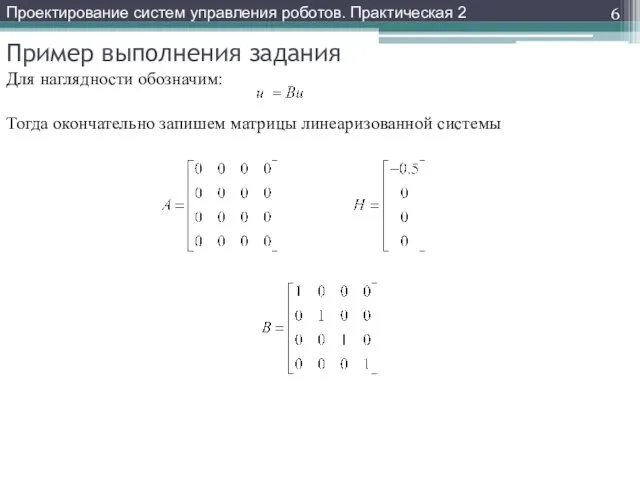
Для наглядности обозначим:
Тогда окончательно
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
Для наглядности обозначим:
Тогда окончательно
Пример выполнения задания
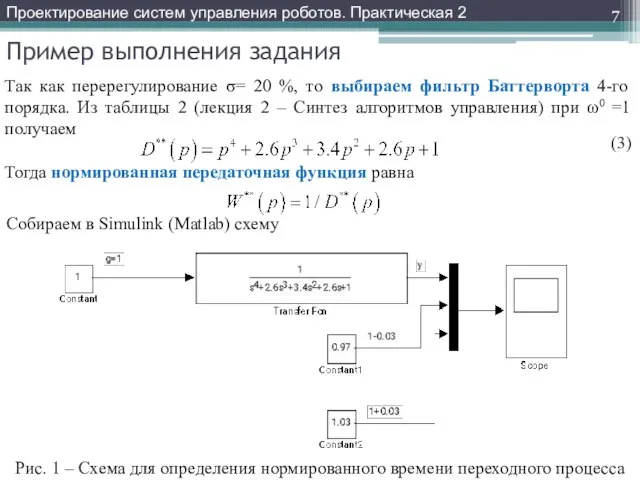
Так как перерегулирование σ= 20 %, то выбираем фильтр
Пример выполнения задания
Так как перерегулирование σ= 20 %, то выбираем фильтр
Пример выполнения задания
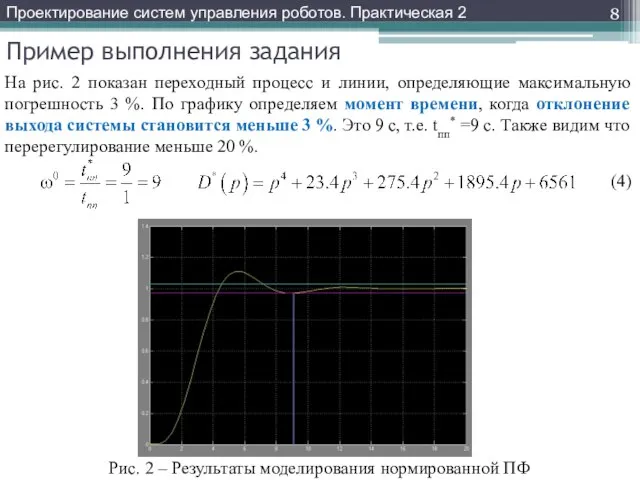
На рис. 2 показан переходный процесс и линии, определяющие
Пример выполнения задания
На рис. 2 показан переходный процесс и линии, определяющие
Пример выполнения задания
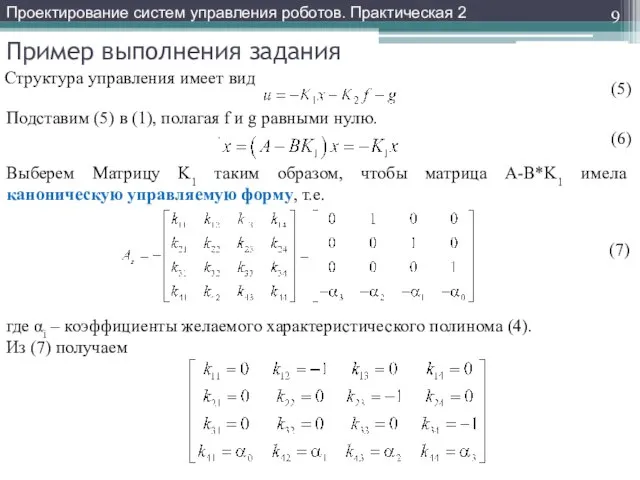
Структура управления имеет вид
Проектирование систем управления роботов. Практическая 2
(5)
Подставим
Пример выполнения задания
Структура управления имеет вид
Проектирование систем управления роботов. Практическая 2
(5)
Подставим
Пример выполнения задания
Проведем моделирование, используя программу приведенную ниже
Проектирование систем управления роботов.
Пример выполнения задания
Проведем моделирование, используя программу приведенную ниже
Проектирование систем управления роботов.
Пример выполнения задания
Подставим теперь управление (5) в систему (1)
Проектирование систем управления
Пример выполнения задания
Подставим теперь управление (5) в систему (1)
Проектирование систем управления
Пример выполнения задания
Результаты моделирования и программа представлены ниже
Проектирование систем управления роботов.
Пример выполнения задания
Результаты моделирования и программа представлены ниже
Проектирование систем управления роботов.
Пример выполнения задания
Теперь необходимо исследовать линейный регулятор с нелинейной моделью
Проектирование систем
Пример выполнения задания
Теперь необходимо исследовать линейный регулятор с нелинейной моделью
Проектирование систем
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
clc
clear all
close all
mk=1.0; mac=0.112;
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
clc
clear all
close all
mk=1.0; mac=0.112;
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
function y1 = hexacopter_function1(t,x,flag,m,Jx,Jy,Jz)
x1=[x(2);x(4);x(5);x(6)];
Vx=x(1);
Пример выполнения задания
Проектирование систем управления роботов. Практическая 2
function y1 = hexacopter_function1(t,x,flag,m,Jx,Jy,Jz)
x1=[x(2);x(4);x(5);x(6)];
Vx=x(1);
 Prezentatsia_4 (1)
Prezentatsia_4 (1) Алгоритм с ветвлением. Исполнитель робот
Алгоритм с ветвлением. Исполнитель робот Презентация "Блок-схемы алгоритмов" - скачать презентации по Информатике
Презентация "Блок-схемы алгоритмов" - скачать презентации по Информатике Презентация "Кодирование информации" - скачать презентации по Информатике
Презентация "Кодирование информации" - скачать презентации по Информатике Создание БД и таблиц в СУБД. Понятие ключевого поля и индекса. Типы данных. Свойства полей
Создание БД и таблиц в СУБД. Понятие ключевого поля и индекса. Типы данных. Свойства полей Последовательный порт. Архитектура персональных компьютеров
Последовательный порт. Архитектура персональных компьютеров Алгоритмическая конструкция. Ветвление
Алгоритмическая конструкция. Ветвление Информационное обеспечение прогнозирования
Информационное обеспечение прогнозирования Разработка web-представительства агентства недвижимости
Разработка web-представительства агентства недвижимости Аттестационная работа. Образовательная программа внеурочной деятельности по информатике Занимательная компьютерная графика
Аттестационная работа. Образовательная программа внеурочной деятельности по информатике Занимательная компьютерная графика Проектировка и разработка игры в жанре RPG
Проектировка и разработка игры в жанре RPG Что умеет компьютер
Что умеет компьютер Международная электронная платёжная система Wallet One (единый кошелёк)
Международная электронная платёжная система Wallet One (единый кошелёк)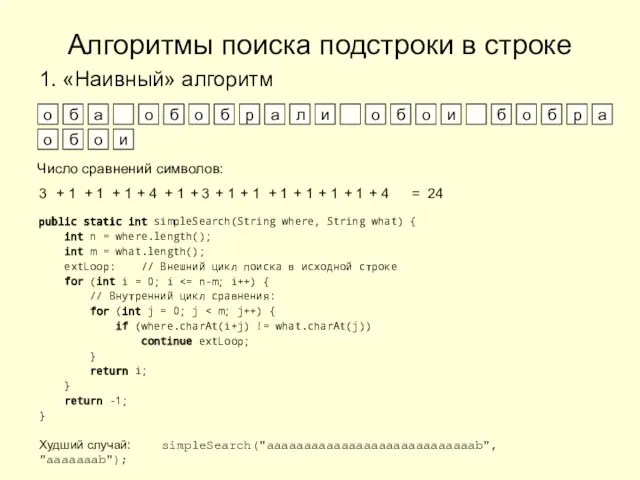 Алгоритмы поиска подстроки в строке
Алгоритмы поиска подстроки в строке Бесплатные аналоги коммерческих программ для Windows Подготовила учитель информатики МОУ «ООШ №10» Нестеренко Е.С.
Бесплатные аналоги коммерческих программ для Windows Подготовила учитель информатики МОУ «ООШ №10» Нестеренко Е.С. Типы данных
Типы данных Оформление презентаций
Оформление презентаций Основы работы MS Excel
Основы работы MS Excel Создание документов средствами on-line сервисов
Создание документов средствами on-line сервисов Контент для социальных сетей
Контент для социальных сетей Технологии 3D печати и тенденции их развития
Технологии 3D печати и тенденции их развития Базы данных и СУБД. Модели данных. Реляционная модель данных
Базы данных и СУБД. Модели данных. Реляционная модель данных Радиопрограмма Адреса милосердия союз НКО и социального СМИ
Радиопрограмма Адреса милосердия союз НКО и социального СМИ Кодирование информации ( шифровка информации ) Подготовила: Беломестнова Марина Вадимовна учитель начальных классов МОУ ООШ № 1
Кодирование информации ( шифровка информации ) Подготовила: Беломестнова Марина Вадимовна учитель начальных классов МОУ ООШ № 1 Классификация информационных систем
Классификация информационных систем CSS Properties. The position property
CSS Properties. The position property Презентация на тему: Графология как инструмент кадрового менеджмента.
Презентация на тему: Графология как инструмент кадрового менеджмента. База данных. Прикладная среда-система управления базой данных Аccess.
База данных. Прикладная среда-система управления базой данных Аccess.