- Презентация "MSC.Dytran - 10" - скачать презентации по Информатике

Содержание
- 2. СОДЕРЖАНИЕ Закрепление узлов – SPCn Вынужденное перемещение – FORCE/MOMENT Жёсткие стенки – WALL Элементы-связи – RCONN
- 3. ЗАКРЕПЛЕНИЕ УЗЛОВ Предотвращает движение узла в указанном направлении Операторы Balk Data, “закрепляющие” узлы, должны быть инициированы
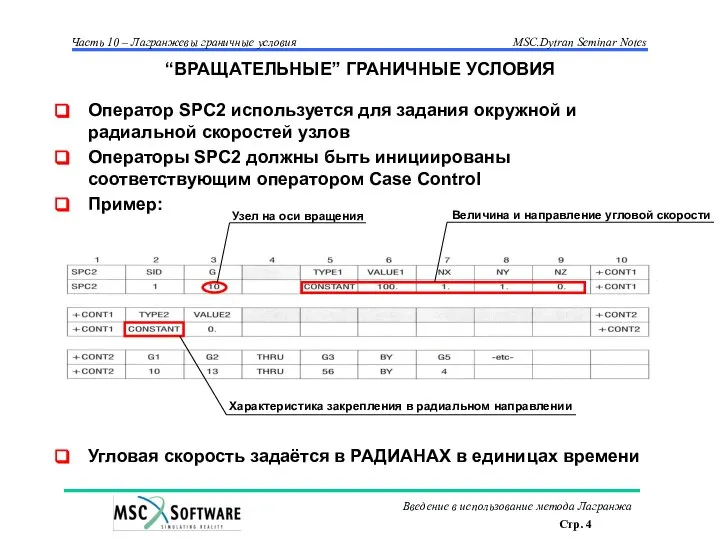
- 4. “ВРАЩАТЕЛЬНЫЕ” ГРАНИЧНЫЕ УСЛОВИЯ Оператор SPC2 используется для задания окружной и радиальной скоростей узлов Операторы SPC2 должны
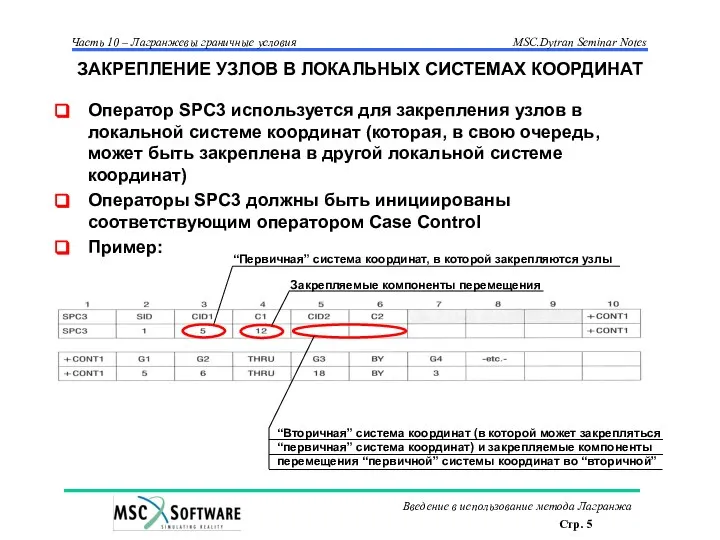
- 5. ЗАКРЕПЛЕНИЕ УЗЛОВ В ЛОКАЛЬНЫХ СИСТЕМАХ КООРДИНАТ Оператор SPC3 используется для закрепления узлов в локальной системе координат
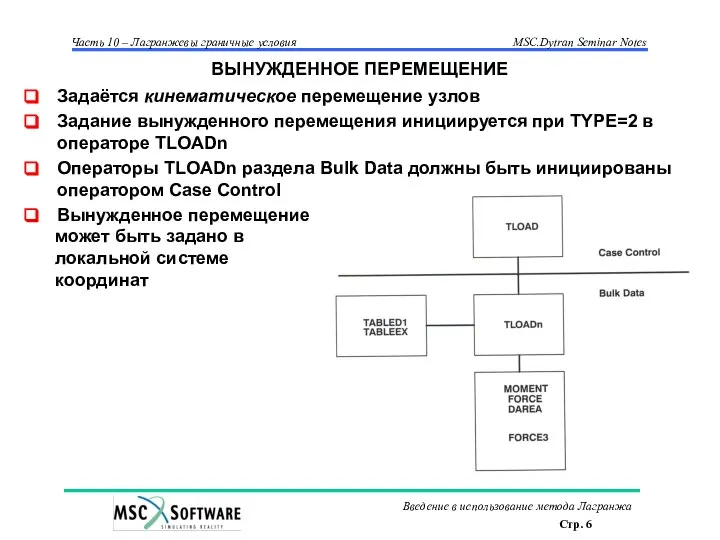
- 6. ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ Задаётся кинематическое перемещение узлов Задание вынужденного перемещения инициируется при TYPE=2 в операторе TLOADn Операторы
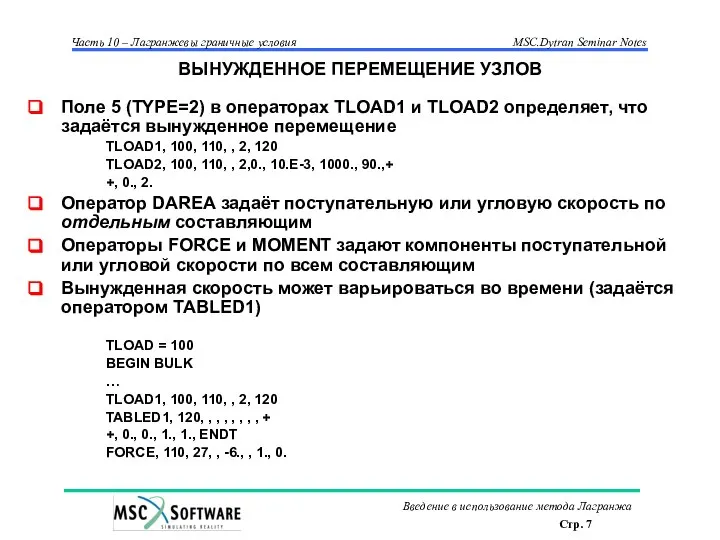
- 7. ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ УЗЛОВ Поле 5 (TYPE=2) в операторах TLOAD1 и TLOAD2 определяет, что задаётся вынужденное перемещение
- 8. ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ Поле CORDXXX в операторе FORCE определяет систему координат, в которой задаётся вынужденное перемещение FORCE,
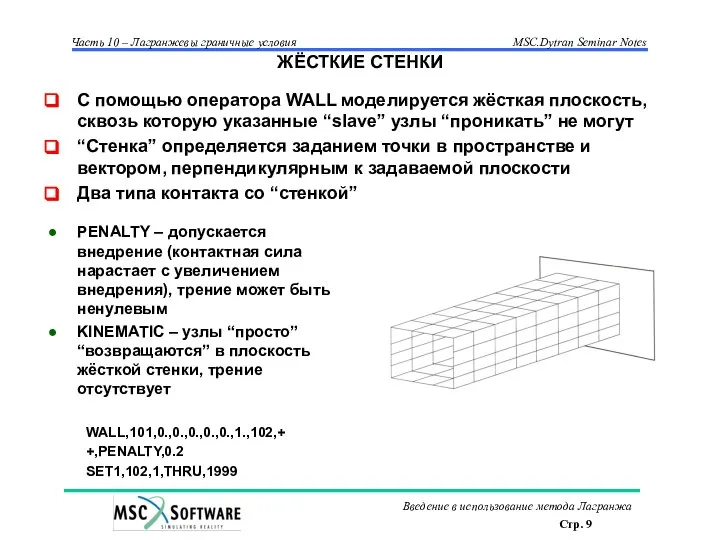
- 9. ЖЁСТКИЕ СТЕНКИ С помощью оператора WALL моделируется жёсткая плоскость, сквозь которую указанные “slave” узлы “проникать” не
- 10. ЭЛЕМЕНТЫ - СВЯЗИ С помощью элементов - связей связываются две разные (с разными размерами элементов) конечно-элементные
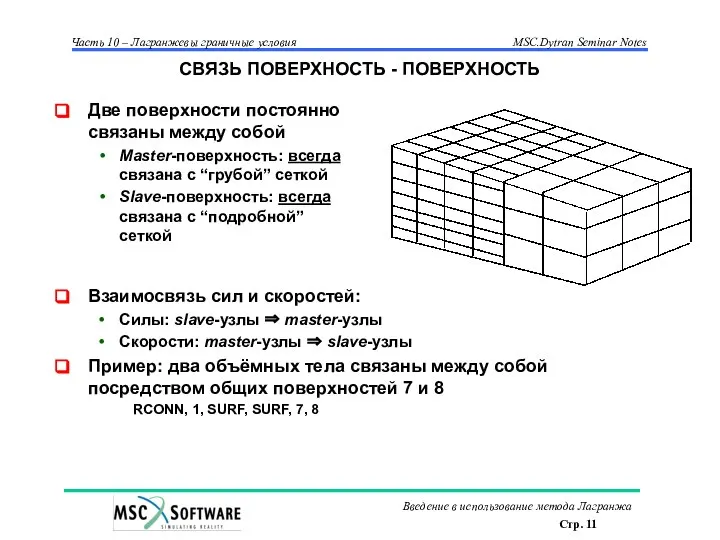
- 11. СВЯЗЬ ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ Две поверхности постоянно связаны между собой Master-поверхность: всегда связана с “грубой” сеткой
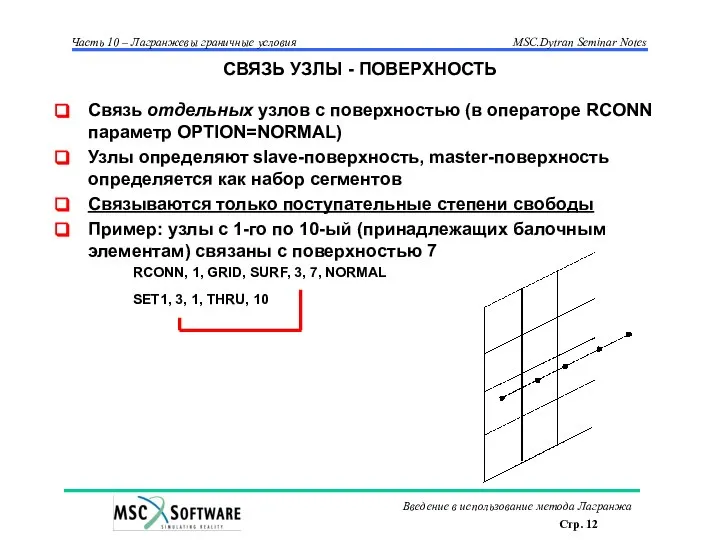
- 12. СВЯЗЬ УЗЛЫ - ПОВЕРХНОСТЬ Связь отдельных узлов с поверхностью (в операторе RCONN параметр OPTION=NORMAL) Узлы определяют
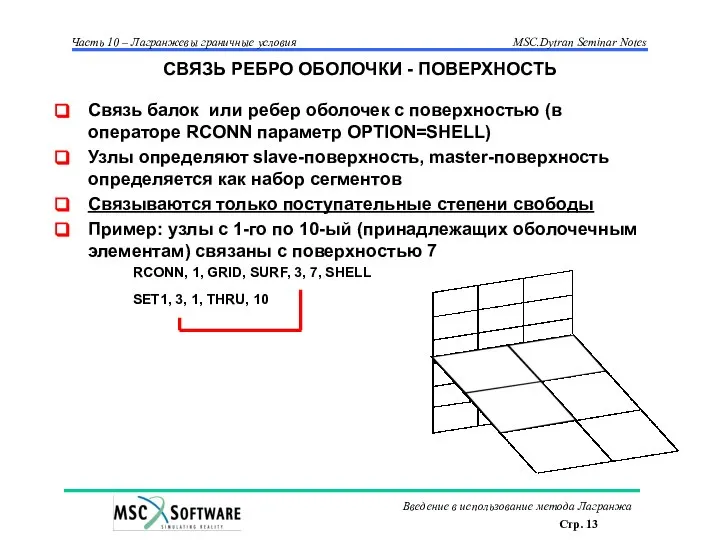
- 13. СВЯЗЬ РЕБРО ОБОЛОЧКИ - ПОВЕРХНОСТЬ Связь балок или ребер оболочек с поверхностью (в операторе RCONN параметр
- 14. ЭЛЕМЕНТЫ - ЖЁСТКИЕ ТЕЛА Оператор RBE2 задаёт набор узлов, определяющих жёсткое тело С помощью этого оператора
- 15. КИНЕМАТИЧЕСКАЯ СВЯЗЬ Элемент KJOIN может использоваться для связи оболочки с объёмным элементом (достигается связь по всем
- 17. Скачать презентацию
СОДЕРЖАНИЕ
Закрепление узлов – SPCn
Вынужденное перемещение – FORCE/MOMENT
Жёсткие стенки – WALL
Элементы-связи –
СОДЕРЖАНИЕ
Закрепление узлов – SPCn
Вынужденное перемещение – FORCE/MOMENT
Жёсткие стенки – WALL
Элементы-связи –
ЗАКРЕПЛЕНИЕ УЗЛОВ
Предотвращает движение узла в указанном направлении
Операторы Balk Data, “закрепляющие” узлы,
ЗАКРЕПЛЕНИЕ УЗЛОВ
Предотвращает движение узла в указанном направлении
Операторы Balk Data, “закрепляющие” узлы,
“ВРАЩАТЕЛЬНЫЕ” ГРАНИЧНЫЕ УСЛОВИЯ
Оператор SPC2 используется для задания окружной и радиальной
“ВРАЩАТЕЛЬНЫЕ” ГРАНИЧНЫЕ УСЛОВИЯ
Оператор SPC2 используется для задания окружной и радиальной
ЗАКРЕПЛЕНИЕ УЗЛОВ В ЛОКАЛЬНЫХ СИСТЕМАХ КООРДИНАТ
Оператор SPC3 используется для закрепления узлов
ЗАКРЕПЛЕНИЕ УЗЛОВ В ЛОКАЛЬНЫХ СИСТЕМАХ КООРДИНАТ
Оператор SPC3 используется для закрепления узлов
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ
Задаётся кинематическое перемещение узлов
Задание вынужденного перемещения инициируется при TYPE=2 в
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ
Задаётся кинематическое перемещение узлов
Задание вынужденного перемещения инициируется при TYPE=2 в
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ УЗЛОВ
Поле 5 (TYPE=2) в операторах TLOAD1 и TLOAD2 определяет,
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ УЗЛОВ
Поле 5 (TYPE=2) в операторах TLOAD1 и TLOAD2 определяет,
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ
Поле CORDXXX в операторе FORCE определяет систему координат, в которой
ВЫНУЖДЕННОЕ ПЕРЕМЕЩЕНИЕ
Поле CORDXXX в операторе FORCE определяет систему координат, в которой
ЖЁСТКИЕ СТЕНКИ
С помощью оператора WALL моделируется жёсткая плоскость, сквозь которую указанные
ЖЁСТКИЕ СТЕНКИ
С помощью оператора WALL моделируется жёсткая плоскость, сквозь которую указанные
ЭЛЕМЕНТЫ - СВЯЗИ
С помощью элементов - связей связываются две разные (с
ЭЛЕМЕНТЫ - СВЯЗИ
С помощью элементов - связей связываются две разные (с
СВЯЗЬ ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ
Две поверхности постоянно связаны между собой
Master-поверхность: всегда связана
СВЯЗЬ ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ
Две поверхности постоянно связаны между собой
Master-поверхность: всегда связана
СВЯЗЬ УЗЛЫ - ПОВЕРХНОСТЬ
Связь отдельных узлов с поверхностью (в операторе RCONN
СВЯЗЬ УЗЛЫ - ПОВЕРХНОСТЬ
Связь отдельных узлов с поверхностью (в операторе RCONN
СВЯЗЬ РЕБРО ОБОЛОЧКИ - ПОВЕРХНОСТЬ
Связь балок или ребер оболочек с поверхностью
СВЯЗЬ РЕБРО ОБОЛОЧКИ - ПОВЕРХНОСТЬ
Связь балок или ребер оболочек с поверхностью
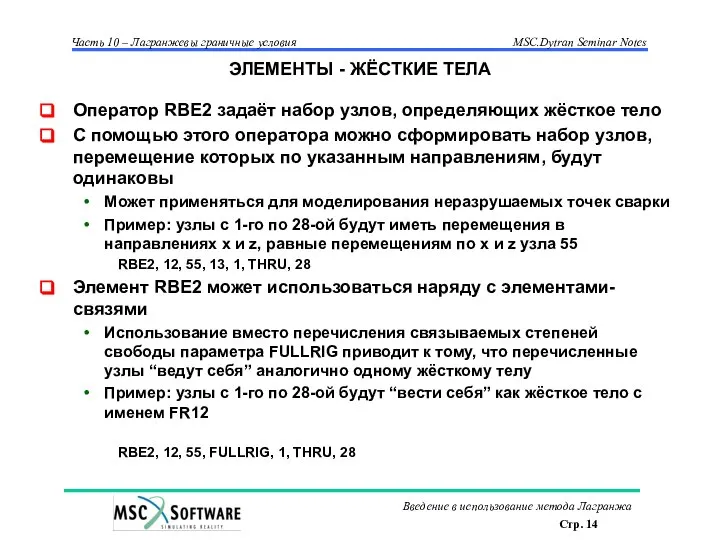
ЭЛЕМЕНТЫ - ЖЁСТКИЕ ТЕЛА
Оператор RBE2 задаёт набор узлов, определяющих жёсткое тело
С
ЭЛЕМЕНТЫ - ЖЁСТКИЕ ТЕЛА
Оператор RBE2 задаёт набор узлов, определяющих жёсткое тело
С
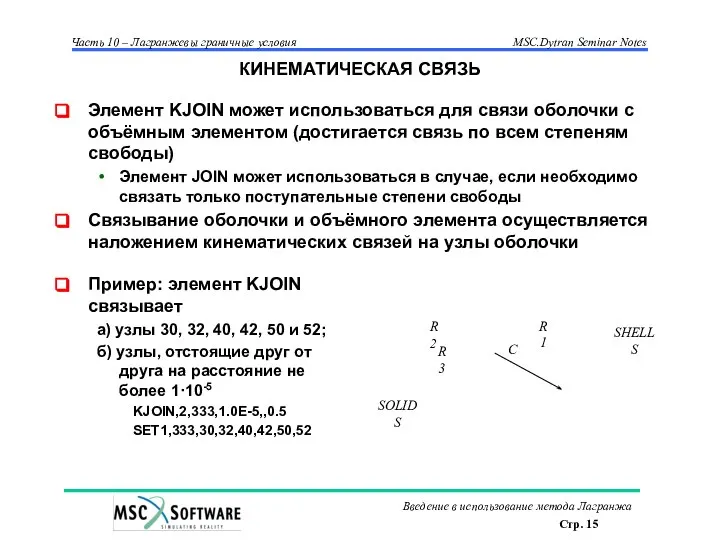
КИНЕМАТИЧЕСКАЯ СВЯЗЬ
Элемент KJOIN может использоваться для связи оболочки с объёмным элементом
КИНЕМАТИЧЕСКАЯ СВЯЗЬ
Элемент KJOIN может использоваться для связи оболочки с объёмным элементом
 Computer-aided manufacturing
Computer-aided manufacturing Internet Technology
Internet Technology Презентация "Основные компоненты компьютера" - скачать презентации по Информатике
Презентация "Основные компоненты компьютера" - скачать презентации по Информатике Безопасный интернет
Безопасный интернет Моделирование и формализация: разработка экономических моделей в среде MS Excel. 10 класс
Моделирование и формализация: разработка экономических моделей в среде MS Excel. 10 класс Информационные технологии
Информационные технологии Программа для создания текстовых документов
Программа для создания текстовых документов Основные функции CLIPS
Основные функции CLIPS Интернет-сленг
Интернет-сленг Требования к разработке приложения на платформе 1С: Предприятие 8.3
Требования к разработке приложения на платформе 1С: Предприятие 8.3 Требования и тенденции построения ОС
Требования и тенденции построения ОС Управление реальной и виртуальной памятью. Основные понятия. Схема динамического преобразования адресов. (Лекция 12)
Управление реальной и виртуальной памятью. Основные понятия. Схема динамического преобразования адресов. (Лекция 12) Примеры для задания Бизнес-идея
Примеры для задания Бизнес-идея Операции соединения. Виды оператора JOIN
Операции соединения. Виды оператора JOIN Как самостоятельно оформить компьютерную презентацию, если ты не дизайнер
Как самостоятельно оформить компьютерную презентацию, если ты не дизайнер Презентация "Алгоритмы" - скачать презентации по Информатике
Презентация "Алгоритмы" - скачать презентации по Информатике Фірмовий знак
Фірмовий знак Антивирус и защита операционной системы от несанкционированного взлома. Бесплатные антивирусы
Антивирус и защита операционной системы от несанкционированного взлома. Бесплатные антивирусы База данных. Таблицы
База данных. Таблицы Структуры, перечисления
Структуры, перечисления Информация и знания. Информационные процессы
Информация и знания. Информационные процессы Методы объектов. (Занятие 8)
Методы объектов. (Занятие 8) Макет. Архитекту́рный маке́т
Макет. Архитекту́рный маке́т Lecture 01. The basic concepts of SQL
Lecture 01. The basic concepts of SQL Проектирование параметрических запросов
Проектирование параметрических запросов Создание сайта IT и IKT - будущее человечества
Создание сайта IT и IKT - будущее человечества Архивация файлов
Архивация файлов Сортировка и поиск данных
Сортировка и поиск данных