Алгоритм многокамерного сопровождения человека используя данные от видеокамеры и тепловизора В.В. Терехов, И.Е. Ермолаев, Н.В
- Алгоритм многокамерного сопровождения человека используя данные от видеокамеры и тепловизора В.В. Терехов, И.Е. Ермолаев, Н.В

Содержание
- 2. Общая информация Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения охраны и анализа ситуаций.
- 3. Введение В соответствии с многочисленными требованиями обеспечения безопасности, многие системы оборудованы системами видеонаблюдения. Они генерируют огромное
- 4. 3D проекция для Модели системы и сцены Монитор оператора Видео сервер Видеокамера 1 Видеокамера 2 Тепловизор
- 5. 2D проекция для Модели системы и сцены Монитор оператора Видео сервер Видеокамера 1 Видеокамера 2 Тепловизор
- 6. Информация отображаемая на мониторе оператора Траектория объекта наблюдения На вход алгоритма поступает поток метаданных от видеоаналитики,
- 7. Возможности и особенности алгоритма позволяют повысить точность детектирования целей и уменьшить число ложных срабатываний за счет
- 8. Система калибровки камер Поле зрения камеры N1 в 3D пространстве Поле зрения тепловизора в 3D пространстве
- 9. Система калибровки камер В процессе первоначальной калибровки системы многокамерного сопровождения производится привязка расположения камеры к карте.
- 10. Система калибровки камер На изображении приведен пример расстановки на экране точек с известными глобальными координатами.
- 11. Алгоритм многокамерного сопровождения включает шаги 1. Предполагается, что выборочная функция для каждой камеры имеет нормальный закон
- 12. Алгоритм многокамерного сопровождения включает шаги 2. Рассчитывается перекрытие выборочных функций распределения по всем камерам: 3. Производиться
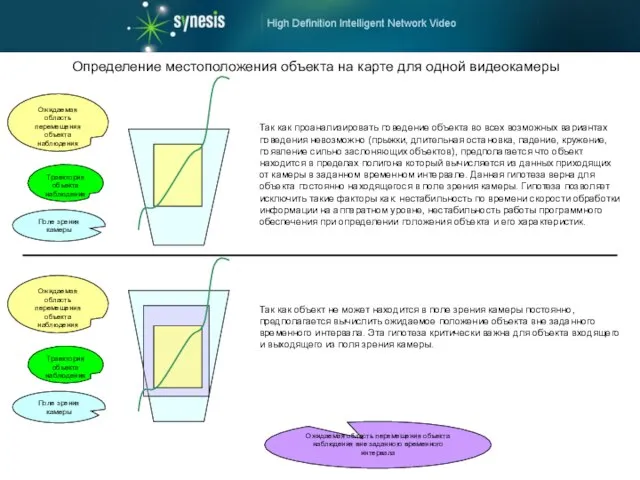
- 13. Траектория объекта наблюдения Ожидаемая область перемещения объекта наблюдения Так как проанализировать поведение объекта во всех возможных
- 14. Формулы вероятностного расчета местоположения объекта на карте для одной видеокамеры/тепловизора Траектория объекта наблюдения Ожидаемая область перемещения
- 15. Формула вероятностного расчета местоположения объекта на карте для нескольких видеокамер/тепловизоров P=F(P1,P2,…Pn)>=alpha где F – функция обработки
- 16. Количество положительных срабатываний зависит от следующих параметров 1. Время суток или степень адаптации сенсора к изменению
- 17. Позитивное ложное срабатывание Поле зрения камеры N1 в 2D пространстве Поле зрения камеры N2 в 2D
- 19. Скачать презентацию
Общая информация
Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения
Общая информация
Цифровые системы видеонаблюдения представлены в большинстве общественных мест для увеличения
Введение
В соответствии с многочисленными требованиями обеспечения безопасности, многие системы оборудованы системами
Введение
В соответствии с многочисленными требованиями обеспечения безопасности, многие системы оборудованы системами
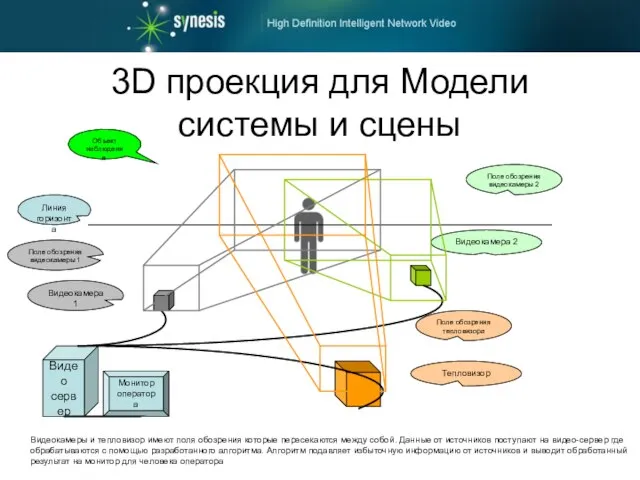
3D проекция для Модели системы и сцены
Монитор
оператора
Видео
сервер
Видеокамера 1
Видеокамера 2
Тепловизор
Видеокамеры и
3D проекция для Модели системы и сцены
Монитор
оператора
Видео
сервер
Видеокамера 1
Видеокамера 2
Тепловизор
Видеокамеры и
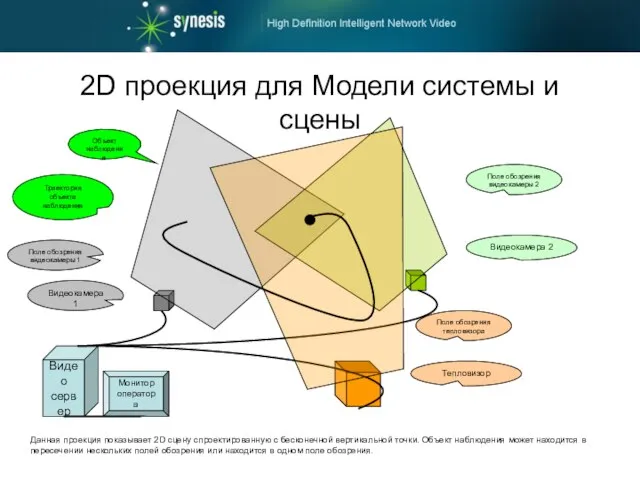
2D проекция для Модели системы и сцены
Монитор
оператора
Видео
сервер
Видеокамера 1
Видеокамера 2
Тепловизор
Данная проекция
2D проекция для Модели системы и сцены
Монитор
оператора
Видео
сервер
Видеокамера 1
Видеокамера 2
Тепловизор
Данная проекция

Информация отображаемая на мониторе оператора
Траектория объекта наблюдения
На вход алгоритма поступает поток
Информация отображаемая на мониторе оператора
Траектория объекта наблюдения
На вход алгоритма поступает поток
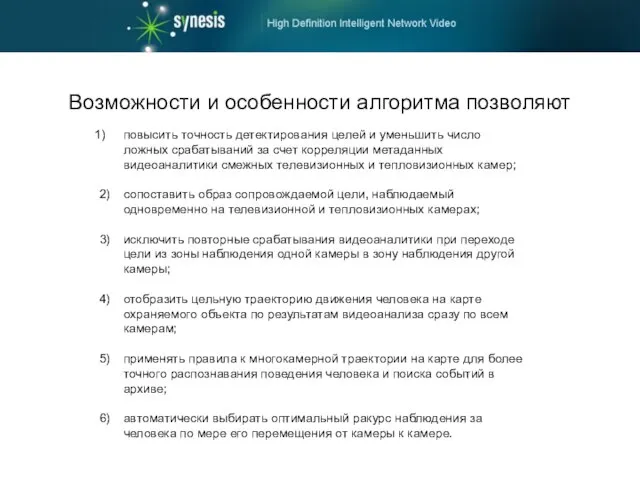
Возможности и особенности алгоритма позволяют
повысить точность детектирования целей и уменьшить число
Возможности и особенности алгоритма позволяют
повысить точность детектирования целей и уменьшить число
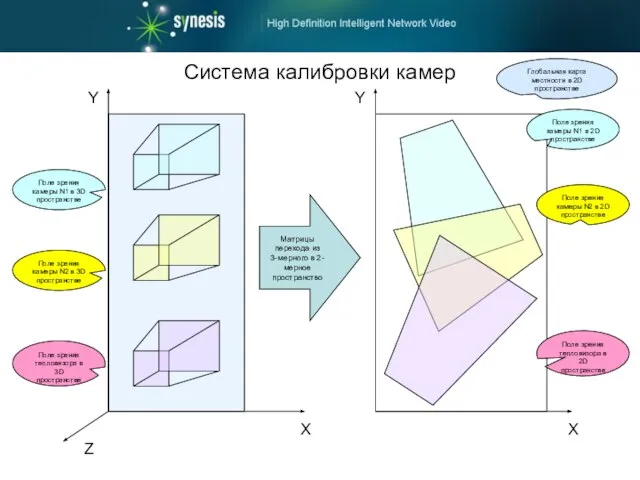
Система калибровки камер
Поле зрения камеры N1 в 3D пространстве
Поле зрения тепловизора
Система калибровки камер
Поле зрения камеры N1 в 3D пространстве
Поле зрения тепловизора
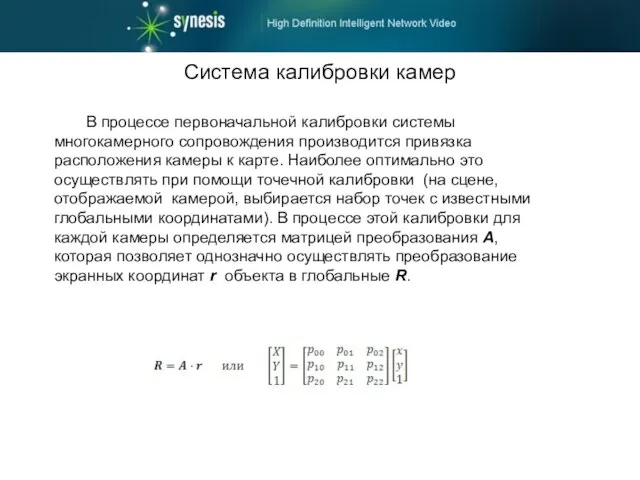
Система калибровки камер
В процессе первоначальной калибровки системы многокамерного сопровождения производится привязка
Система калибровки камер
В процессе первоначальной калибровки системы многокамерного сопровождения производится привязка

Система калибровки камер
На изображении приведен пример расстановки на экране точек
Система калибровки камер
На изображении приведен пример расстановки на экране точек
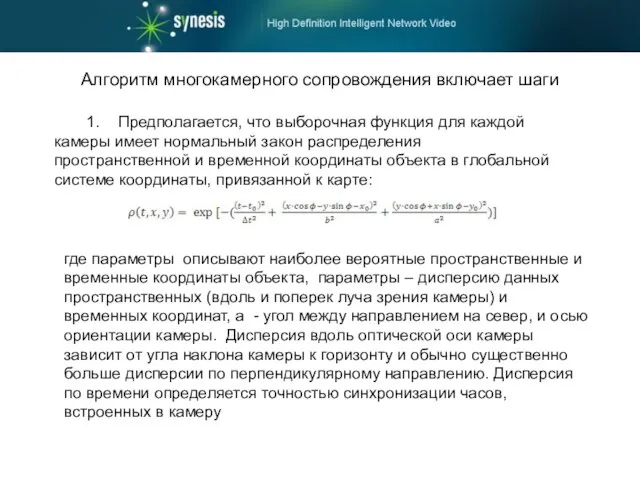
Алгоритм многокамерного сопровождения включает шаги
1. Предполагается, что выборочная функция для каждой
Алгоритм многокамерного сопровождения включает шаги
1. Предполагается, что выборочная функция для каждой
Алгоритм многокамерного сопровождения включает шаги
2. Рассчитывается перекрытие выборочных функций распределения по
Алгоритм многокамерного сопровождения включает шаги
2. Рассчитывается перекрытие выборочных функций распределения по
Траектория объекта наблюдения
Ожидаемая область перемещения объекта наблюдения
Так как проанализировать поведение объекта
Траектория объекта наблюдения
Ожидаемая область перемещения объекта наблюдения
Так как проанализировать поведение объекта

Формулы вероятностного расчета
местоположения объекта на карте для одной видеокамеры/тепловизора
Траектория объекта наблюдения
Ожидаемая
Формулы вероятностного расчета
местоположения объекта на карте для одной видеокамеры/тепловизора
Траектория объекта наблюдения
Ожидаемая
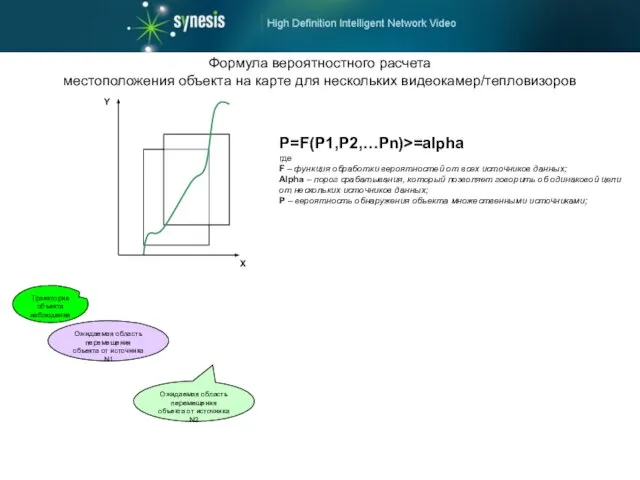
Формула вероятностного расчета
местоположения объекта на карте для нескольких видеокамер/тепловизоров
P=F(P1,P2,…Pn)>=alpha
где
F – функция
Формула вероятностного расчета
местоположения объекта на карте для нескольких видеокамер/тепловизоров
P=F(P1,P2,…Pn)>=alpha
где
F – функция
Количество положительных срабатываний зависит от следующих параметров
1. Время суток или степень
Количество положительных срабатываний зависит от следующих параметров 1. Время суток или степень
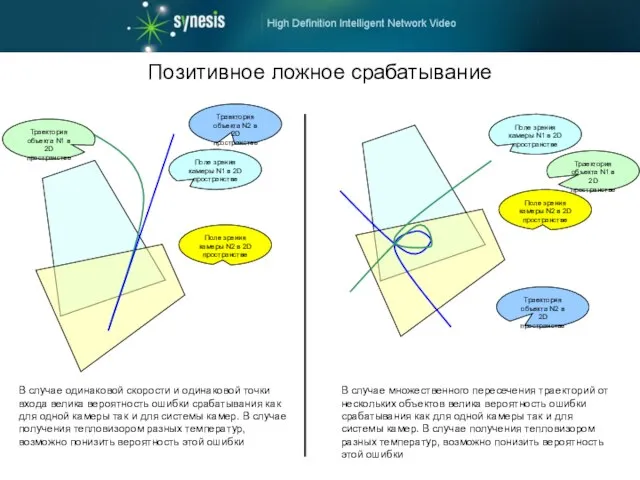
Позитивное ложное срабатывание
Поле зрения камеры N1 в 2D пространстве
Поле зрения камеры
Позитивное ложное срабатывание
Поле зрения камеры N1 в 2D пространстве
Поле зрения камеры
 Мышонок и карандаш - презентация к уроку Технологии
Мышонок и карандаш - презентация к уроку Технологии Коко Шанель или безупречный вкус Сегодня мир моды отмечает юбилейную дату – 125-летие со дня рождения эпохальной Коко Шанель, ф
Коко Шанель или безупречный вкус Сегодня мир моды отмечает юбилейную дату – 125-летие со дня рождения эпохальной Коко Шанель, ф Припущенные овощи
Припущенные овощи Урок технологии. Аппликация «Собачка»
Урок технологии. Аппликация «Собачка» Лебедь - презентация к уроку Технологии_
Лебедь - презентация к уроку Технологии_ Микроформаты — свежий взгляд на семантику веб-страниц
Микроформаты — свежий взгляд на семантику веб-страниц Конструирование и моделирование юбки. Зачётная работа Павлюткиной Елены Евгеньевны, учителя технологии МОУ «СОШ №6», группа ИК
Конструирование и моделирование юбки. Зачётная работа Павлюткиной Елены Евгеньевны, учителя технологии МОУ «СОШ №6», группа ИК ГУ «Урюпинская СШ» Учитель технологии Заремба О.Н. 2014-2015 уч.год
ГУ «Урюпинская СШ» Учитель технологии Заремба О.Н. 2014-2015 уч.год  Природа - наш дом ГАУ «КЦСОН «ВЕТЕРАН» посёлок Рефтинский Клуб «ОЗОРНИЦЫ»
Природа - наш дом ГАУ «КЦСОН «ВЕТЕРАН» посёлок Рефтинский Клуб «ОЗОРНИЦЫ» Орнаменты из фантиков - презентация к уроку Технологии_
Орнаменты из фантиков - презентация к уроку Технологии_ Как рисовать деревья
Как рисовать деревья Соусы - презентация к уроку Технологии
Соусы - презентация к уроку Технологии РЕСУРСНЫЙ ЦЕНТР молодежных и общественных организаций Web 2.0 для молодежных организаций. - презентация
РЕСУРСНЫЙ ЦЕНТР молодежных и общественных организаций Web 2.0 для молодежных организаций. - презентация П у л – б а р ы и т а л и и Существует три варианта его размещения: бар в центре бассейна. Это самый эффектный, однако и самый затрат
П у л – б а р ы и т а л и и Существует три варианта его размещения: бар в центре бассейна. Это самый эффектный, однако и самый затрат Исследовательская работа Исследовательская работа « Русская матрёшка- символ России» Выполнила:Старост
Исследовательская работа Исследовательская работа « Русская матрёшка- символ России» Выполнила:Старост Цветы Лилия оригами - презентация к уроку Технологии_
Цветы Лилия оригами - презентация к уроку Технологии_ Цифрове відео: Соціальні сервіси
Цифрове відео: Соціальні сервіси Квиллинг, или Бумагокручение Маленькое чудо своими руками…
Квиллинг, или Бумагокручение Маленькое чудо своими руками… Построение чертежа фартука - презентация к уроку Технологии_
Построение чертежа фартука - презентация к уроку Технологии_ Рисуем Снегурочку и Деда Мороза
Рисуем Снегурочку и Деда Мороза  ПРОИЗВОДСТВО МЫЛА В ДОМАШНИХ УСЛОВИЯХ Исполнитель: Зубковский Артём ученик 2«В» класса МБОУ СОШ № 121 Верх-Исетского района г. Ек
ПРОИЗВОДСТВО МЫЛА В ДОМАШНИХ УСЛОВИЯХ Исполнитель: Зубковский Артём ученик 2«В» класса МБОУ СОШ № 121 Верх-Исетского района г. Ек Государственное бюджетное учреждение социального обслуживания населения Свердловской области «Комплексный центр социального о
Государственное бюджетное учреждение социального обслуживания населения Свердловской области «Комплексный центр социального о Жалюзи - презентация к уроку Технологии
Жалюзи - презентация к уроку Технологии «ГОРЯЧИЕ НАПИТКИ. ЧАЕПИТИЕ…» Презентация к уроку технологии Раздел: «Кулинария» Тема:«Горячие напитки.Чаепитие…» разработан
«ГОРЯЧИЕ НАПИТКИ. ЧАЕПИТИЕ…» Презентация к уроку технологии Раздел: «Кулинария» Тема:«Горячие напитки.Чаепитие…» разработан Разработала Сараева Е.А.
Разработала Сараева Е.А. История мировой письменности. Виды письма - презентация к уроку Технологии
История мировой письменности. Виды письма - презентация к уроку Технологии Плетёные картины - презентация к уроку Технологии
Плетёные картины - презентация к уроку Технологии Работа с переключателем - презентация к уроку Технологии
Работа с переключателем - презентация к уроку Технологии