- 2_5341291960042789264

Содержание
- 2. Рассмотрим на этом занятии подключение ультразвукового датчика (дальномера или сонара). Датчик работает так же, как это
- 3. ультразвуковой дальномер HC-SR04 имеет диапазон измерения от 2 см до 400 см, работает при температурах от
- 4. Скетч для подключения датчика hc-sr04 к Arduino int trigPin = 8; // назначаем имя для Pin8
- 6. Скачать презентацию
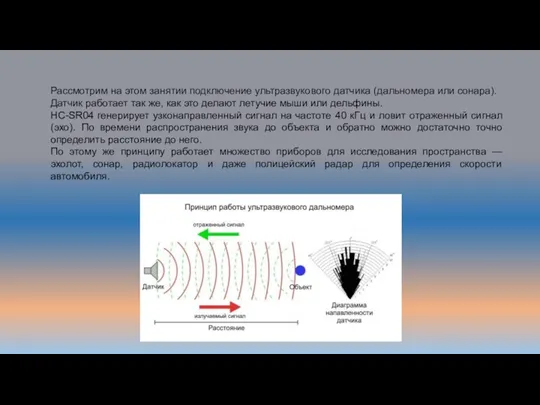
Рассмотрим на этом занятии подключение ультразвукового датчика (дальномера или сонара).
Датчик работает
Рассмотрим на этом занятии подключение ультразвукового датчика (дальномера или сонара).
Датчик работает
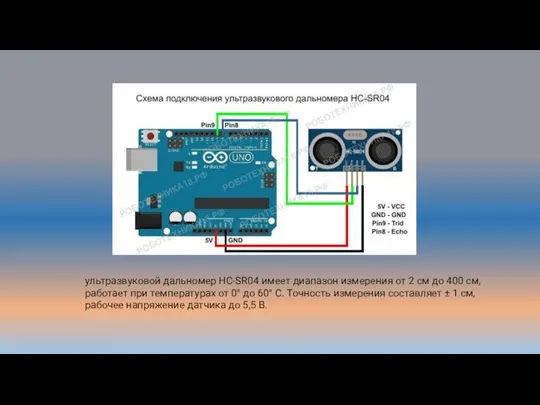
ультразвуковой дальномер HC-SR04 имеет диапазон измерения от 2 см до
ультразвуковой дальномер HC-SR04 имеет диапазон измерения от 2 см до
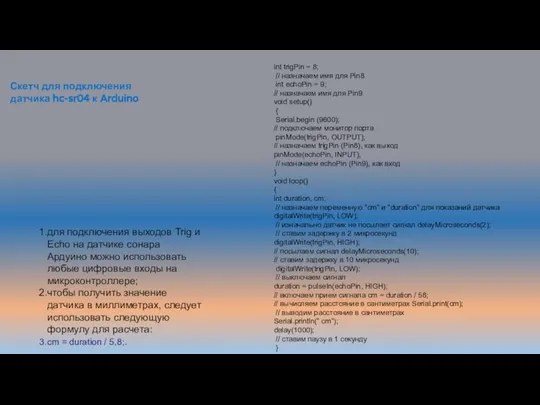
Скетч для подключения датчика hc-sr04 к Arduino
int trigPin = 8;
Скетч для подключения датчика hc-sr04 к Arduino
int trigPin = 8;
 космос группа №1
космос группа №1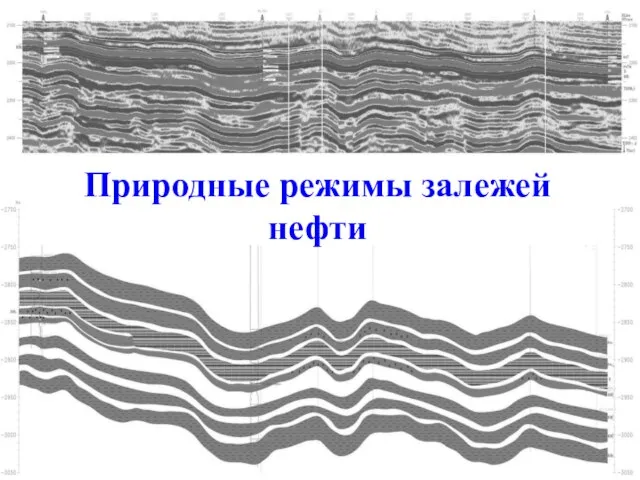 Природные режимы залежей нефти
Природные режимы залежей нефти Low tgt rxu
Low tgt rxu Поделки из помпончиков
Поделки из помпончиков Парламентаризм
Парламентаризм Клинкерный кирпич на основе легкоплавких глин
Клинкерный кирпич на основе легкоплавких глин Реактивные, турбореактивные и ракетные двигатели. (Тема 6)
Реактивные, турбореактивные и ракетные двигатели. (Тема 6) Мастер-класс Театр безопасных дорог
Мастер-класс Театр безопасных дорог Роль семьи в профилаклике правонарушений
Роль семьи в профилаклике правонарушений Golubi
Golubi Трансляция задания. Шифрование маршрутов
Трансляция задания. Шифрование маршрутов Архитектура процессоров. Структура компьютерных средств Тема №7. Занятие №2/2
Архитектура процессоров. Структура компьютерных средств Тема №7. Занятие №2/2 Специфика отраслей агропромышленного комплекса региона. Тема 6
Специфика отраслей агропромышленного комплекса региона. Тема 6 Пластинография. Аппликация - мозаика из шариков пластилина
Пластинография. Аппликация - мозаика из шариков пластилина Мартин Коули
Мартин Коули Фарфор
Фарфор Подача и распределение бетонной смеси
Подача и распределение бетонной смеси Modlitwy dziecka
Modlitwy dziecka Подъёмное устройство для автоматизации парковки в ограниченном пространстве
Подъёмное устройство для автоматизации парковки в ограниченном пространстве Сова из туалетной втулки
Сова из туалетной втулки знаешь ли ты историю посёлка Савинский
знаешь ли ты историю посёлка Савинский Линия производcтва томатного сока
Линия производcтва томатного сока ПРЕЗЕНТАЦИЯ_КАНДИДАТСКАЯ ДИССЕРТАЦИЯ (3)
ПРЕЗЕНТАЦИЯ_КАНДИДАТСКАЯ ДИССЕРТАЦИЯ (3) Эхо Афганской войны (г. Чистополь)
Эхо Афганской войны (г. Чистополь) ДАНКЕ ШЕН
ДАНКЕ ШЕН Связь психических процессов с работой головного мозга. КУЗЕНКОВА ВИКТОРИЯ. МАНЬШЕВА АЛИСА. УЛЬРИХ АРИНА
Связь психических процессов с работой головного мозга. КУЗЕНКОВА ВИКТОРИЯ. МАНЬШЕВА АЛИСА. УЛЬРИХ АРИНА Кристиан Диор
Кристиан Диор Поздравительная открытка
Поздравительная открытка