- Автономные роботы. Сборщик мусора

Содержание
- 2. Задачи СОЗДАНИЕ РОБОТА РАСПОЗНАВАНИЕ МУСОРА Техническое зрение Обучение на изображениях Манипулятор для захвата Шасси Плата управления
- 3. Назначение Захват, подъем и перемещение груза Манипулятор Конструкция Алюминиевые детали, сервомоторы, плата управления Discovery
- 4. Назначение Формирование управляющих ШИМ сигналов для сервомотором и драйверов двигателей шасси Микроконтроллер STM32 Программирование C++ онлайн
- 5. Назначение Движение по пересеченной местности Шасси Конструкция Металлический каркас Моторы постоянного тока с редуктором
- 6. Назначение Распознавание предметов Обучение на подборке изображений Техническое зрение (в работе) Программирование С++, библиотека OpenCV, Проект
- 7. Робот виртуального присутствия Костин Андрей, Мартышкин Денис Гимназия №3
- 8. Задача Создание робота для: Виртуального присутствия на мероприятиях Чтения лекций и докладов из «дома» Дистанционного обучения
- 9. 1)Сборка шасси 2)Программа управления моторами и датчиками (Arduino) 3)Удаленное управление с компьютера Что сделано
- 10. Архитектура программной системы
- 11. Робот разведчик Подготовили: Чередник Андрей, Кушнарев Дмитрий
- 12. Конструкция робота Датчик расстояния Крепление Сервомотор Двигатели и колеса Драйвер двигателей Arduino Nano
- 13. Модуль управления Сделано на данный момент: Робот подключен к компьютеру через usb кабель и управляется с
- 14. Модуль постройки карты Сделано на данный момент: Реализовано измерение расстояние между датчиком и объектом, что позволяет
- 15. Беспилотный автомобиль Бармадян Алексей, Иванов Лев Гимназия №3 Самара, 2017 Новосибирск 2018
- 16. 1 ЦЕЛЬ Разработка собственного прототипа беспилотного автомобиля, способного следовать по дорожной разметке и удерживать дистанцию до
- 17. 1 Что сделано Собрано шасси. Подключены мотор (через шилд), серво двигатель и ультразвуковой датчик. Написана программа,
- 19. Скачать презентацию

Задачи
СОЗДАНИЕ РОБОТА
РАСПОЗНАВАНИЕ МУСОРА
Техническое зрение
Обучение на изображениях
Манипулятор для захвата
Шасси
Плата управления
Задачи
СОЗДАНИЕ РОБОТА
РАСПОЗНАВАНИЕ МУСОРА
Техническое зрение
Обучение на изображениях
Манипулятор для захвата
Шасси
Плата управления

Назначение
Захват, подъем и перемещение груза
Манипулятор
Конструкция
Алюминиевые детали, сервомоторы, плата управления Discovery
Назначение
Захват, подъем и перемещение груза
Манипулятор
Конструкция
Алюминиевые детали, сервомоторы, плата управления Discovery

Назначение
Формирование управляющих ШИМ сигналов для сервомотором и драйверов двигателей шасси
Микроконтроллер
STM32
Программирование
C++
онлайн среда
Назначение
Формирование управляющих ШИМ сигналов для сервомотором и драйверов двигателей шасси
Микроконтроллер
STM32
Программирование
C++
онлайн среда
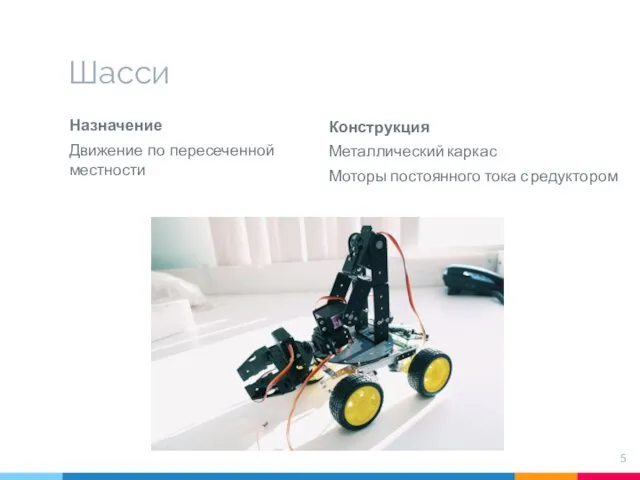
Назначение
Движение по пересеченной местности
Шасси
Конструкция
Металлический каркас
Моторы постоянного тока с редуктором
Назначение
Движение по пересеченной местности
Шасси
Конструкция
Металлический каркас
Моторы постоянного тока с редуктором
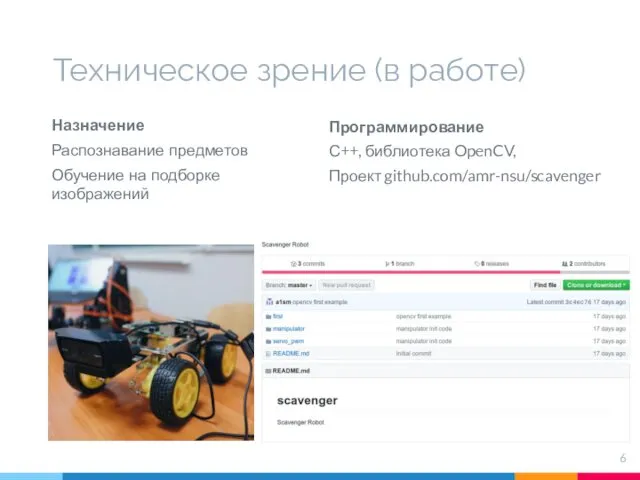
Назначение
Распознавание предметов
Обучение на подборке изображений
Техническое зрение (в работе)
Программирование
С++, библиотека OpenCV,
Проект github.com/amr-nsu/scavenger
Назначение
Распознавание предметов
Обучение на подборке изображений
Техническое зрение (в работе)
Программирование
С++, библиотека OpenCV,
Проект github.com/amr-nsu/scavenger
Робот виртуального присутствия
Костин Андрей, Мартышкин Денис
Гимназия №3
Робот виртуального присутствия
Костин Андрей, Мартышкин Денис
Гимназия №3
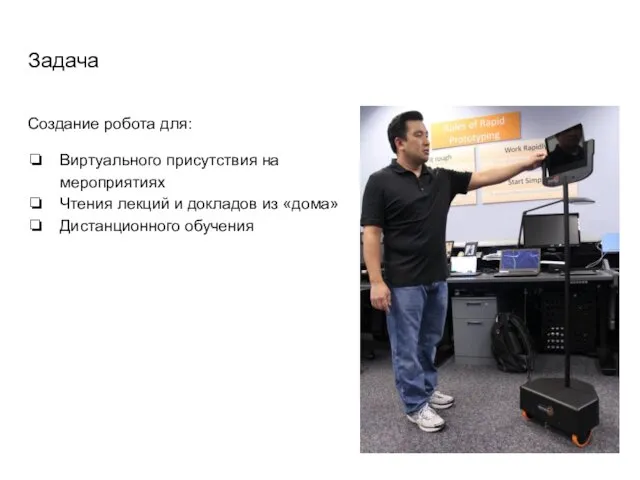
Задача
Создание робота для:
Виртуального присутствия на мероприятиях
Чтения лекций и докладов из «дома»
Дистанционного
Задача
Создание робота для:
Виртуального присутствия на мероприятиях
Чтения лекций и докладов из «дома»
Дистанционного

1)Сборка шасси
2)Программа управления моторами и датчиками (Arduino)
3)Удаленное управление с компьютера
Что
1)Сборка шасси
2)Программа управления моторами и датчиками (Arduino)
3)Удаленное управление с компьютера
Что
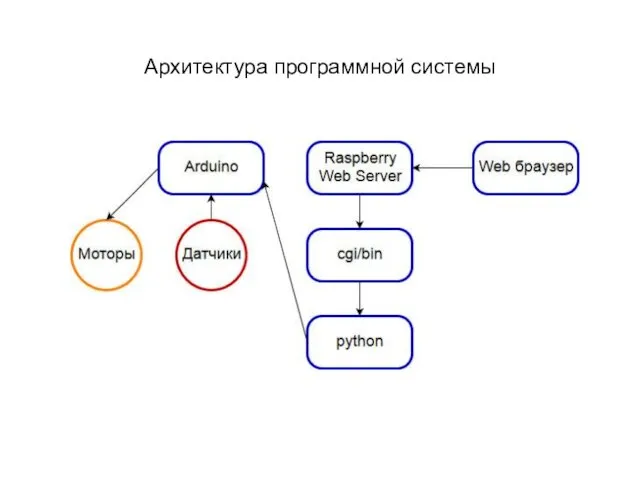
Архитектура программной системы
Архитектура программной системы
Робот разведчик
Подготовили: Чередник Андрей, Кушнарев Дмитрий
Робот разведчик
Подготовили: Чередник Андрей, Кушнарев Дмитрий
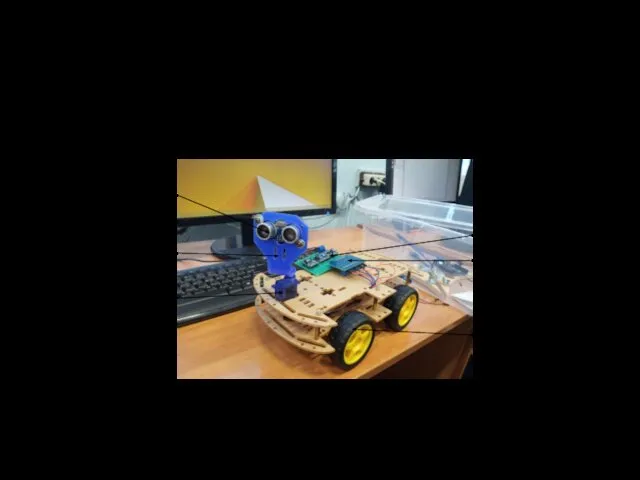
Конструкция робота
Датчик расстояния
Крепление
Сервомотор
Двигатели
и
колеса
Драйвер
двигателей
Arduino Nano
Конструкция робота
Датчик расстояния
Крепление
Сервомотор
Двигатели
и
колеса
Драйвер
двигателей
Arduino Nano
Модуль управления
Сделано на данный момент:
Робот подключен к компьютеру через usb кабель
Модуль управления
Сделано на данный момент:
Робот подключен к компьютеру через usb кабель
Модуль постройки карты
Сделано на данный момент:
Реализовано измерение расстояние между датчиком и
Модуль постройки карты
Сделано на данный момент:
Реализовано измерение расстояние между датчиком и
Беспилотный автомобиль
Бармадян Алексей, Иванов Лев
Гимназия №3
Самара, 2017
Новосибирск 2018
Беспилотный автомобиль
Бармадян Алексей, Иванов Лев
Гимназия №3
Самара, 2017
Новосибирск 2018
1
ЦЕЛЬ
Разработка собственного прототипа беспилотного автомобиля, способного следовать по дорожной разметке и
1
ЦЕЛЬ
Разработка собственного прототипа беспилотного автомобиля, способного следовать по дорожной разметке и

1
Что сделано
Собрано шасси.
Подключены мотор (через шилд), серво двигатель и ультразвуковой датчик.
Написана
1
Что сделано
Собрано шасси.
Подключены мотор (через шилд), серво двигатель и ультразвуковой датчик.
Написана
 Соревнование по робототехнике Космическое путешествие
Соревнование по робототехнике Космическое путешествие Аппликация из ткани
Аппликация из ткани Посвящается моему какашке 2
Посвящается моему какашке 2 Пять ключей к своему стилю и имиджу
Пять ключей к своему стилю и имиджу языкознание
языкознание Что мы знаем о компьютерной зависимости?
Что мы знаем о компьютерной зависимости? Чернова
Чернова ИнфТехнЮрДеят
ИнфТехнЮрДеят Олька-любимая сестра. Фотоальбом
Олька-любимая сестра. Фотоальбом e50652094ed46e06c6ee04a7c8110c5a
e50652094ed46e06c6ee04a7c8110c5a Искусственный интеллект
Искусственный интеллект Презентация_ТЭ_Промышленная безопасность
Презентация_ТЭ_Промышленная безопасность Симметрия
Симметрия Предупреждён- значит вооружён
Предупреждён- значит вооружён Служба контроля проверки структурного подразделения Московского метрополитена
Служба контроля проверки структурного подразделения Московского метрополитена Презентация Зарисовки Пят PowerPoint
Презентация Зарисовки Пят PowerPoint Темір жол тасымалының тарифтері
Темір жол тасымалының тарифтері Цитология щитовидной железы
Цитология щитовидной железы маруся
маруся А.В. Масс Расскажи про Иван Палыча
А.В. Масс Расскажи про Иван Палыча Термины из сборника
Термины из сборника Робототехника
Робототехника Витаминная радуг
Витаминная радуг 20140121_urok_po_obshchestvoznaniyu_6_klass
20140121_urok_po_obshchestvoznaniyu_6_klass Девятиэтажный кирпичный жилой дом в городе сургут
Девятиэтажный кирпичный жилой дом в городе сургут Наш друг снеговик
Наш друг снеговик Государственное управление в сфере охраны окружающей среды
Государственное управление в сфере охраны окружающей среды Презентация курск (1)
Презентация курск (1)