- Бортовые системы взвешивания и контроля перегруза для коммерческой техники

Содержание
- 2. Вид техники, тип подвески и задачи клиента Наиболее нагруженная ось различных видов ТС Что нужно клиенту:
- 3. Фургон. Пневмоподвеска. Контура ведущих осей разделены по бортам. Отдельный контур на рулевую ось.
- 4. Фургон. Пневмоподвеска. Раздельные контура на ведущий мост (лево,право), задний ленивец, рулевую ось.
- 5. Полуприцеп. Пневмоподвеска. Общий контур на все три оси.
- 6. Полуприцеп. Пневмоподвеска. Раздельные контура на правый и левый борта.
- 7. Полуприцеп. Пневмоподвеска. Раздельные контура первую ось и ленивец
- 8. Применяемость Параметры системы: Погрешность измерения веса – Количество аналоговых датчиков давления на 1 блок – 4
- 9. Монтаж. Пневмоподвеска.
- 10. Рессорная подвеска. Варианты установки.
- 11. Рессорная подвеска. Балансирная тележка.
- 12. Монтаж. Рессорная подвеска. Внимание! После установки датчиков деформации показания датчиков должны быть окрашены в зеленый цвет
- 13. Особенности монтажа. Рессорная подвеска. Последствия «вредного» контакта Защита датчика на передней оси
- 14. Применяемость 3 датчика вес груза вес машины нагрузка на 3 оси 4 датчика нагрузка на все
- 15. Гидропневматическая подвеска.
- 16. Весовые терминалы VESA TRUCKLOAD Преимущества: CAN интерфейс (поддержка J1939) Интерфейс RS-485, протокол LLS Настройка и калибровка
- 17. Весовые терминалы VESA TRUCKLOAD
- 18. Конфигуратор VESA TruckLoad
- 19. Калибровка. Требования. Требования при проведении калибровки: Калибровка проводится на ровной горизонтальной поверхности с использованием сертифицированных поосных
- 20. Проведение калибровки Калибровка следует проводить на поосных или платформенных весах. Калибровка производится по двум точкам, на
- 21. Подключение к терминалам Терминал мониторинга Весовой терминал CAN H CAN L CAN шина т/с На данный
- 22. Основной экран системы Vesa Truckload
- 23. Меню «Настройка»
- 24. Меню «Настройка»
- 25. Монтаж системы VesaLoader. Гидроцилиндры подъема стрелы
- 26. Монтаж системы VesaLoader.
- 27. Монтаж системы VesaLoader.
- 28. Основной экран системы VesaLoader. Параметры.
- 29. Калибровка системы VesaLoader.
- 30. Контрольные взвешивания. Контрольные взвешивания: Установите динамический режим взвешивания; Проведите трехкратное взвешивание калибровочного груза, соответствующие значения текущего
- 32. Скачать презентацию
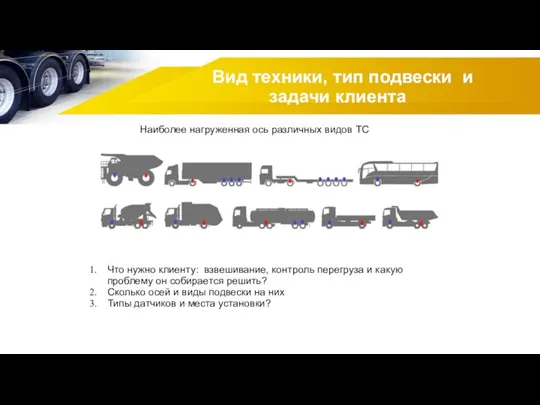
Вид техники, тип подвески и задачи клиента
Наиболее нагруженная ось различных видов
Вид техники, тип подвески и задачи клиента
Наиболее нагруженная ось различных видов

Фургон. Пневмоподвеска.
Контура ведущих осей разделены по бортам. Отдельный контур на рулевую
Фургон. Пневмоподвеска.
Контура ведущих осей разделены по бортам. Отдельный контур на рулевую

Фургон. Пневмоподвеска.
Раздельные контура на ведущий мост (лево,право), задний ленивец, рулевую ось.
Фургон. Пневмоподвеска.
Раздельные контура на ведущий мост (лево,право), задний ленивец, рулевую ось.

Полуприцеп. Пневмоподвеска.
Общий контур на все три оси.
Полуприцеп. Пневмоподвеска.
Общий контур на все три оси.

Полуприцеп. Пневмоподвеска.
Раздельные контура на правый и левый борта.
Полуприцеп. Пневмоподвеска.
Раздельные контура на правый и левый борта.

Полуприцеп. Пневмоподвеска.
Раздельные контура первую ось и ленивец
Полуприцеп. Пневмоподвеска.
Раздельные контура первую ось и ленивец
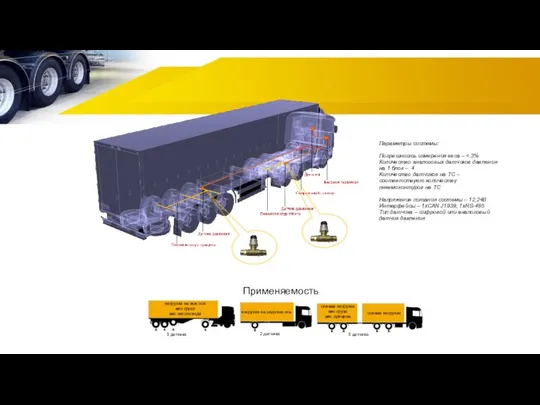
Применяемость
Параметры системы:
Погрешность измерения веса – < 3%
Количество аналоговых датчиков давления на
Применяемость
Параметры системы:
Погрешность измерения веса – < 3%
Количество аналоговых датчиков давления на

Монтаж. Пневмоподвеска.
Монтаж. Пневмоподвеска.

Рессорная подвеска. Варианты установки.
Рессорная подвеска. Варианты установки.

Рессорная подвеска. Балансирная тележка.
Рессорная подвеска. Балансирная тележка.

Монтаж.
Рессорная подвеска.
Внимание! После установки датчиков деформации показания датчиков должны быть
Монтаж.
Рессорная подвеска.
Внимание! После установки датчиков деформации показания датчиков должны быть

Особенности монтажа.
Рессорная подвеска.
Последствия «вредного» контакта
Защита датчика на передней оси
Особенности монтажа.
Рессорная подвеска.
Последствия «вредного» контакта
Защита датчика на передней оси
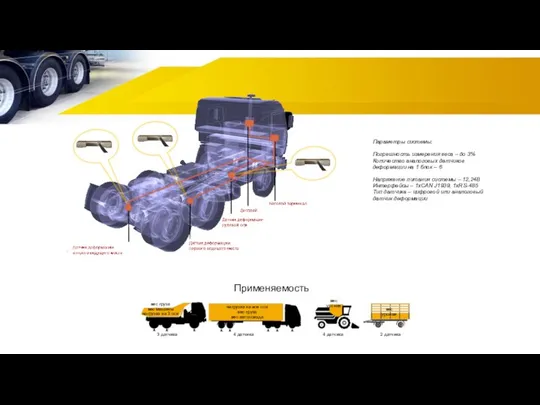
Применяемость
3 датчика
вес груза
вес машины
нагрузка на 3 оси
4 датчика
нагрузка на все оси
Применяемость
3 датчика
вес груза
вес машины
нагрузка на 3 оси
4 датчика
нагрузка на все оси

Гидропневматическая подвеска.
Гидропневматическая подвеска.
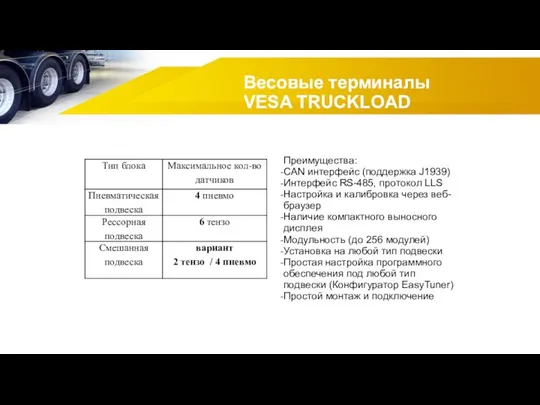
Весовые терминалы VESA TRUCKLOAD
Преимущества:
CAN интерфейс (поддержка J1939)
Интерфейс RS-485, протокол LLS
Настройка и
Весовые терминалы VESA TRUCKLOAD
Преимущества:
CAN интерфейс (поддержка J1939)
Интерфейс RS-485, протокол LLS
Настройка и

Весовые терминалы VESA TRUCKLOAD
Весовые терминалы VESA TRUCKLOAD
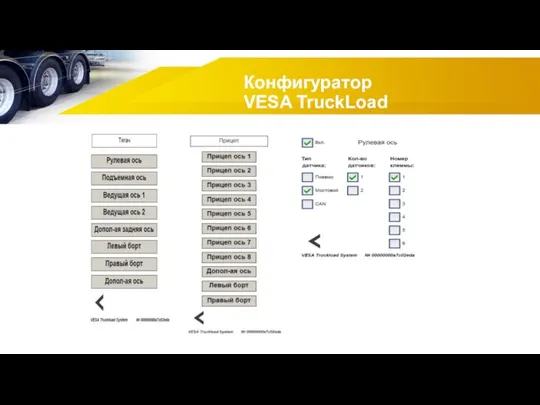
Конфигуратор
VESA TruckLoad
Конфигуратор
VESA TruckLoad

Калибровка. Требования.
Требования при проведении калибровки:
Калибровка проводится на ровной горизонтальной поверхности с
Калибровка. Требования.
Требования при проведении калибровки:
Калибровка проводится на ровной горизонтальной поверхности с

Проведение калибровки
Калибровка следует проводить на поосных или платформенных весах.
Калибровка производится по
Проведение калибровки
Калибровка следует проводить на поосных или платформенных весах.
Калибровка производится по

Подключение к терминалам
Терминал мониторинга
Весовой терминал
CAN H
CAN L
CAN шина т/с
На данный момент
Подключение к терминалам
Терминал мониторинга
Весовой терминал
CAN H
CAN L
CAN шина т/с
На данный момент
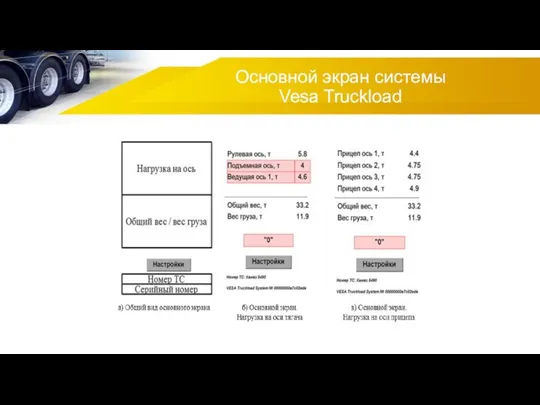
Основной экран системы Vesa Truckload
Основной экран системы Vesa Truckload

Меню «Настройка»
Меню «Настройка»
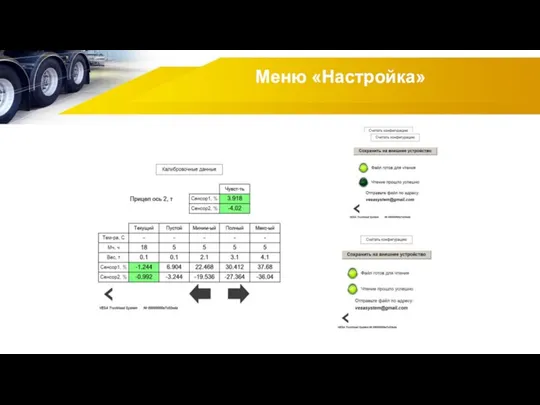
Меню «Настройка»
Меню «Настройка»
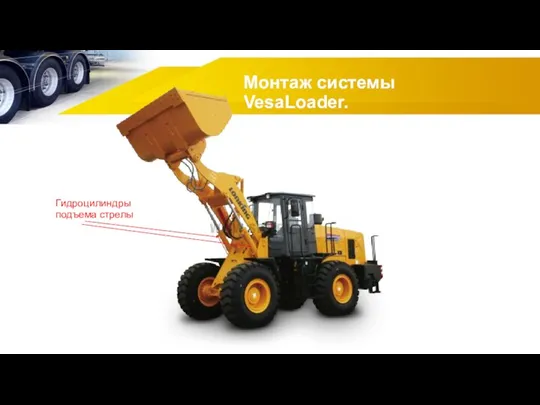
Монтаж системы
VesaLoader.
Гидроцилиндры подъема стрелы
Монтаж системы
VesaLoader.
Гидроцилиндры подъема стрелы

Монтаж системы
VesaLoader.
Монтаж системы
VesaLoader.

Монтаж системы
VesaLoader.
Монтаж системы
VesaLoader.

Основной экран системы
VesaLoader. Параметры.
Основной экран системы
VesaLoader. Параметры.

Калибровка системы
VesaLoader.
Калибровка системы
VesaLoader.
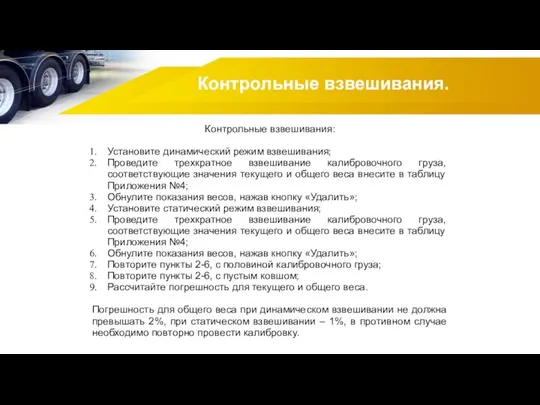
Контрольные взвешивания.
Контрольные взвешивания:
Установите динамический режим взвешивания;
Проведите трехкратное взвешивание калибровочного груза, соответствующие
Контрольные взвешивания.
Контрольные взвешивания:
Установите динамический режим взвешивания;
Проведите трехкратное взвешивание калибровочного груза, соответствующие
 Диагностика и реабилитация нарушений функции ходьбы и равновесия при синдроме центрального гемипареза в восстановительном периоде инсул
Диагностика и реабилитация нарушений функции ходьбы и равновесия при синдроме центрального гемипареза в восстановительном периоде инсул Основные понятия надежности аппаратного обеспечения автоматизированных систем
Основные понятия надежности аппаратного обеспечения автоматизированных систем Искусство Древней Индии. Буддизм
Искусство Древней Индии. Буддизм Космические коммунисты.1 этап
Космические коммунисты.1 этап Электрический двигатель постоянного тока
Электрический двигатель постоянного тока Язык блок - схем
Язык блок - схем Проблема утилизации нефтесодержащих отходов
Проблема утилизации нефтесодержащих отходов Основы автотранспортной отрасли
Основы автотранспортной отрасли Обустройка бани
Обустройка бани Виды роботов
Виды роботов ООО Ресурс
ООО Ресурс da1429c7
da1429c7 Пасха
Пасха Мультиметр М830. Құрылымдық сұлба
Мультиметр М830. Құрылымдық сұлба Достопримечательности Таврово
Достопримечательности Таврово Кризисные состояния у детей и подростков
Кризисные состояния у детей и подростков Городской азотный экомобиль
Городской азотный экомобиль Виды рекламы и её влияние на дошкольников
Виды рекламы и её влияние на дошкольников Триумф аматоров.10кл - Презентация к уроку
Триумф аматоров.10кл - Презентация к уроку Школа
Школа Younicorn workshop 01
Younicorn workshop 01 20180304_urok_6_kl
20180304_urok_6_kl Схема проезда на ЦТ Климовск
Схема проезда на ЦТ Климовск 20141007_starukha_izergil
20141007_starukha_izergil Знакомство с составными задачами
Знакомство с составными задачами Gerasimov_Evgeniy_Android
Gerasimov_Evgeniy_Android Брифинг
Брифинг Разработка мероприятий по цифровизации распределительных сетей сельскохозяйственного назначения
Разработка мероприятий по цифровизации распределительных сетей сельскохозяйственного назначения