- Электромеханические системы (электропривод)

Содержание
- 2. Литература Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство ЮУрГУ. 2006. -
- 3. РАЗДЕЛ 1 ВВЕДЕНИЕ РАЗДЕЛ 2 МЕХАНИЧЕСКАЯ ЧАСТЬ Разделы 1 и 2
- 4. ЛЕКЦИЯ 1. ОПРЕДЕЛЕНИЕ, СТРУКТУРА, ХАРАКТЕРИСТИКИ, РАЗОМКНУТЫЕ, ЗАМКНУТЫЕ ЭМС Раздел 1 Введение. Содержание дисциплины «Электромеханические системы» (ЭМС)
- 5. Определение по ГОСТ Р 50362-92 «Электромеханическая система или электропривод – совокупность взаимодействующих преобразователей электроэнергии, электромеханических и
- 6. Назначение и применение ЭМС Назначение и применение электромеханических систем (электропривода): приведение в движение исполнительных органов рабочей
- 7. Автоматизированный электропривод ПрУ - преобразовательное устройство: СПУ - силовое преобразовательное устройство; ИСУ - информационная система управления;
- 8. Состав электропривода Из определения понятия «Электропривод» и его функциональной схемы следует, что электропривод состоит из четырех
- 9. Электродвигатели Постоянного тока независимого возбуждения; параллельного возбуждения; последовательного возбуждения; смешанного возбуждения; с возбуждением от постоянных магнитов;
- 10. Силовые преобразовательные устройства В силовых преобразовательных устройствах используются: электромашинные преобразователи (электромашинные усилители); электромагнитные преобразователи (магнитные усилители);
- 11. Передаточные устройства ПУ предназначены для передачи механической энергии от электродвигателя к исполнительному механизму ИМ и согласования
- 12. Редуктор Зубчато-реечная передача Барабанно -канатная передача Кривошипно-шатунный механизм Ременная передача Винтовая передача Шарико-винтовая передача Фрикционная передача
- 13. Системы управления Системы управления электропривода представляют собой совокупность управляющих и информационных систем, предназначенных для управления электроприводом
- 14. Разомкнутая система
- 15. Электроприводы могут работать не только в двигательном, но и в тормозном режиме (например, спуск груза, принудительное
- 16. Замкнутая система Важной функцией системы управления является также осуществление технологического процесса с минимальными затратами электрической энергии.
- 17. Классификация автоматизированных электроприводов
- 18. Современный электропривод Многокоординатные электроприводы на основе специальных шаговых электродвигателей находят применение в высокоточных робототехнических установках, сборочных
- 19. Классификация по диапазону скоростей
- 20. Классификация по виду управления
- 21. ЛЕКЦИЯ 2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ И РАБОЧЕГО МЕХАНИЗМА Раздел 2. Механическая часть
- 22. Физические величины, характеризующие движение
- 23. Формирование крутящего момента Изменение величин, характеризующих движение рабочих органов машины, происходит при воздействии на их кинематическую
- 24. Знаки моментов, прикладываемых к механической части электропривода, нужно соотносить со знаком скорости вращения. Одно из направлений
- 25. Знаки моментов и скоростей Знаки моментов, прикладываемых к механической части электропривода, нужно соотносить со знаком скорости
- 26. Момент двигателя зависит от его скорости. Взаимосвязь момента, развиваемого двигателем, и скорости вращения М=f(ω) определяет механические
- 27. 1 — ДПТ НВ; его механическая характеристика имеет высокую жесткость, постоянную во всех точках; 2 —
- 28. Уравнение движения
- 29. Графическое определение ωуст Точка А пересечения механических характеристик двигателя и вентилятора соответствует установившемуся режиму работы М=Мс
- 30. Активный и реактивный статические моменты Активный момент сопротивления (Мса) движению прикладываемый к рабочему органу машины создается
- 32. Динамика механической системы При М∑ =0 (F∑ =0) механическая система находится в состоянии покоя или равномерного
- 33. Второй закон Ньютона Импульс силы — это вектор, равный произведению вектора результирующей силы на время ее
- 34. Момент инерции тела есть сумма моментов инерции материальных точек, составляющих это тело. Он может быть выражен
- 38. Скачать презентацию

Литература
Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство
Литература
Воронин С.Т. Электропривод летательных аппаратов: Конспект лекций. Часть 1. - Челябинск: Издательство

РАЗДЕЛ 1 ВВЕДЕНИЕ
РАЗДЕЛ 2 МЕХАНИЧЕСКАЯ ЧАСТЬ
Разделы 1 и 2
РАЗДЕЛ 1 ВВЕДЕНИЕ
РАЗДЕЛ 2 МЕХАНИЧЕСКАЯ ЧАСТЬ
Разделы 1 и 2
ЛЕКЦИЯ 1. ОПРЕДЕЛЕНИЕ, СТРУКТУРА, ХАРАКТЕРИСТИКИ, РАЗОМКНУТЫЕ, ЗАМКНУТЫЕ ЭМС
Раздел 1 Введение. Содержание
ЛЕКЦИЯ 1. ОПРЕДЕЛЕНИЕ, СТРУКТУРА, ХАРАКТЕРИСТИКИ, РАЗОМКНУТЫЕ, ЗАМКНУТЫЕ ЭМС
Раздел 1 Введение. Содержание

Определение по ГОСТ Р 50362-92
«Электромеханическая система или электропривод – совокупность взаимодействующих преобразователей электроэнергии,
Определение по ГОСТ Р 50362-92
«Электромеханическая система или электропривод – совокупность взаимодействующих преобразователей электроэнергии,
Назначение и применение ЭМС
Назначение и применение электромеханических систем (электропривода): приведение в
Назначение и применение ЭМС
Назначение и применение электромеханических систем (электропривода): приведение в

Автоматизированный электропривод
ПрУ - преобразовательное устройство:
СПУ - силовое преобразовательное устройство;
ИСУ - информационная
Автоматизированный электропривод
ПрУ - преобразовательное устройство:
СПУ - силовое преобразовательное устройство;
ИСУ - информационная
Состав электропривода
Из определения понятия «Электропривод» и его функциональной схемы следует, что
Состав электропривода
Из определения понятия «Электропривод» и его функциональной схемы следует, что

Электродвигатели
Постоянного тока
независимого возбуждения;
параллельного возбуждения;
последовательного возбуждения;
смешанного возбуждения;
с возбуждением от постоянных магнитов;
с полым
Электродвигатели
Постоянного тока
независимого возбуждения;
параллельного возбуждения;
последовательного возбуждения;
смешанного возбуждения;
с возбуждением от постоянных магнитов;
с полым
Силовые преобразовательные устройства
В силовых преобразовательных устройствах используются:
электромашинные преобразователи (электромашинные усилители);
электромагнитные преобразователи
Силовые преобразовательные устройства
В силовых преобразовательных устройствах используются:
электромашинные преобразователи (электромашинные усилители);
электромагнитные преобразователи

Передаточные устройства
ПУ предназначены для передачи механической энергии от электродвигателя к исполнительному
Передаточные устройства
ПУ предназначены для передачи механической энергии от электродвигателя к исполнительному

Редуктор
Зубчато-реечная передача
Барабанно -канатная передача
Кривошипно-шатунный механизм
Ременная передача
Винтовая передача
Шарико-винтовая передача
Фрикционная передача
Редуктор
Зубчато-реечная передача
Барабанно -канатная передача
Кривошипно-шатунный механизм
Ременная передача
Винтовая передача
Шарико-винтовая передача
Фрикционная передача

Системы управления
Системы управления электропривода представляют собой совокупность управляющих и информационных систем,
Системы управления
Системы управления электропривода представляют собой совокупность управляющих и информационных систем,
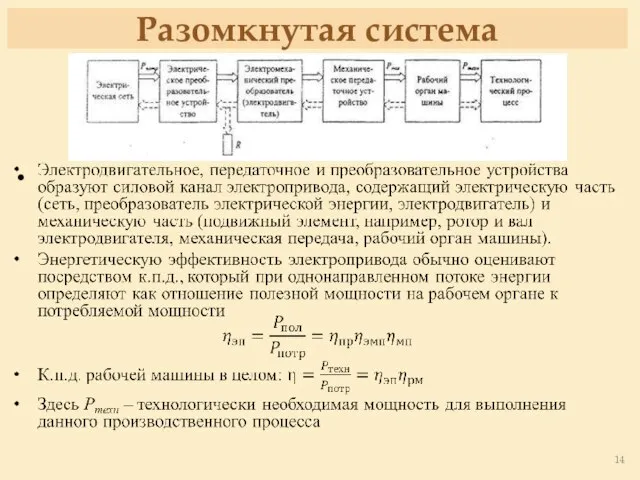
Разомкнутая система
Разомкнутая система
Электроприводы могут работать не только в двигательном, но и в тормозном
Электроприводы могут работать не только в двигательном, но и в тормозном
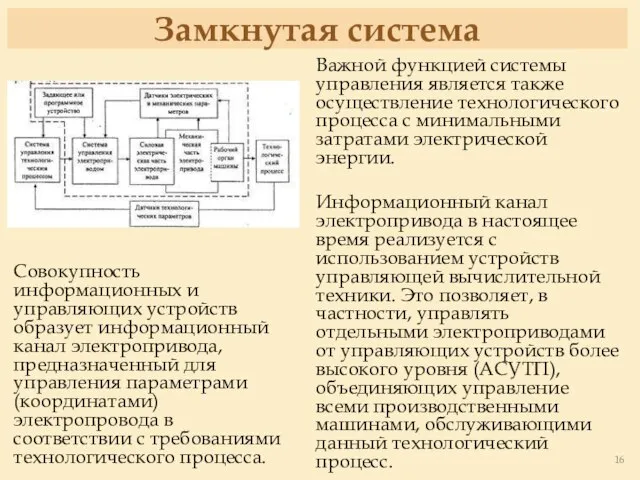
Замкнутая система
Важной функцией системы управления является также осуществление технологического процесса с
Замкнутая система
Важной функцией системы управления является также осуществление технологического процесса с
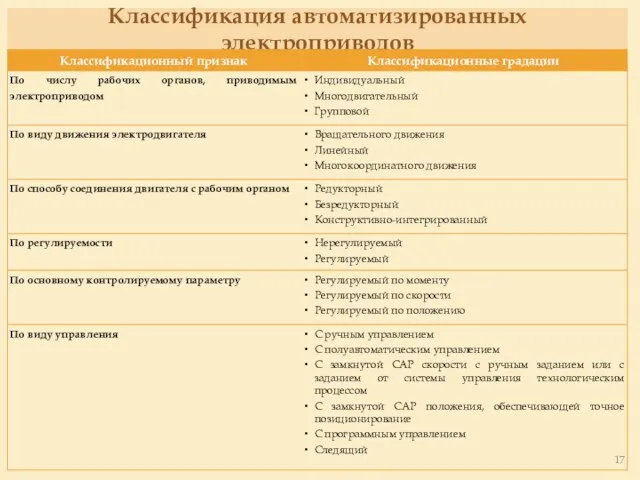
Классификация автоматизированных электроприводов
Классификация автоматизированных электроприводов

Современный электропривод
Многокоординатные электроприводы на основе специальных шаговых электродвигателей находят применение в
Современный электропривод
Многокоординатные электроприводы на основе специальных шаговых электродвигателей находят применение в
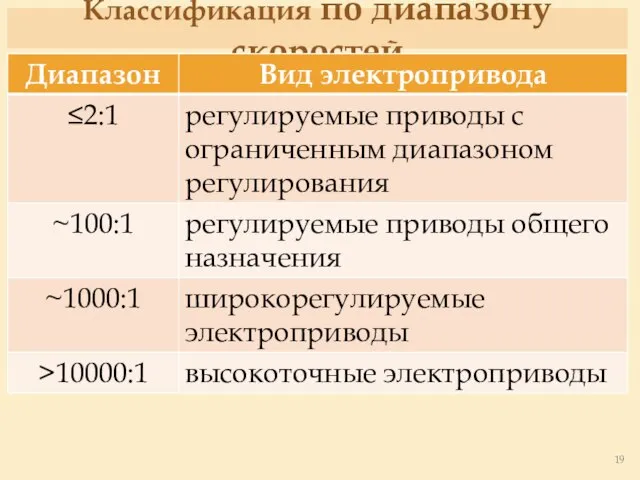
Классификация по диапазону скоростей
Классификация по диапазону скоростей

Классификация по виду управления
Классификация по виду управления

ЛЕКЦИЯ 2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ И РАБОЧЕГО МЕХАНИЗМА
Раздел 2. Механическая часть
ЛЕКЦИЯ 2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ И РАБОЧЕГО МЕХАНИЗМА
Раздел 2. Механическая часть
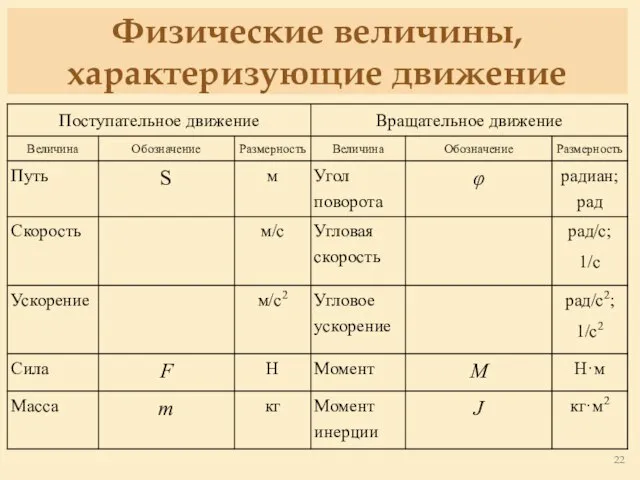
Физические величины, характеризующие движение
Физические величины, характеризующие движение

Формирование крутящего момента
Изменение величин, характеризующих движение рабочих органов машины, происходит при
Формирование крутящего момента
Изменение величин, характеризующих движение рабочих органов машины, происходит при
Знаки моментов, прикладываемых к механической части электропривода, нужно соотносить со знаком
Знаки моментов, прикладываемых к механической части электропривода, нужно соотносить со знаком
Знаки моментов и скоростей
Знаки моментов, прикладываемых к механической части электропривода, нужно
Знаки моментов и скоростей
Знаки моментов, прикладываемых к механической части электропривода, нужно
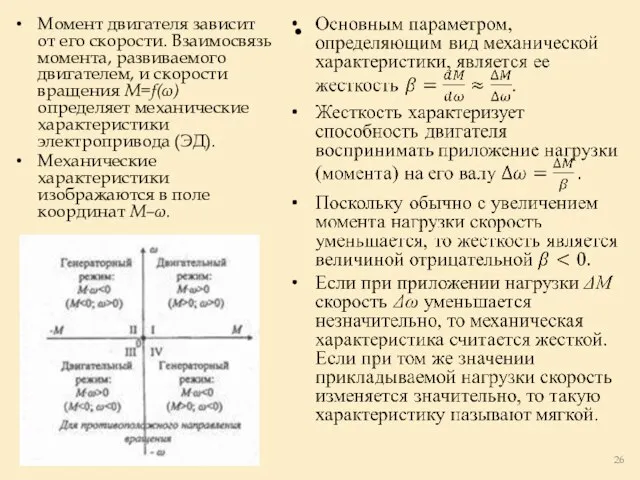
Момент двигателя зависит от его скорости. Взаимосвязь момента, развиваемого двигателем, и
Момент двигателя зависит от его скорости. Взаимосвязь момента, развиваемого двигателем, и

1 — ДПТ НВ; его механическая характеристика имеет высокую жесткость, постоянную
1 — ДПТ НВ; его механическая характеристика имеет высокую жесткость, постоянную
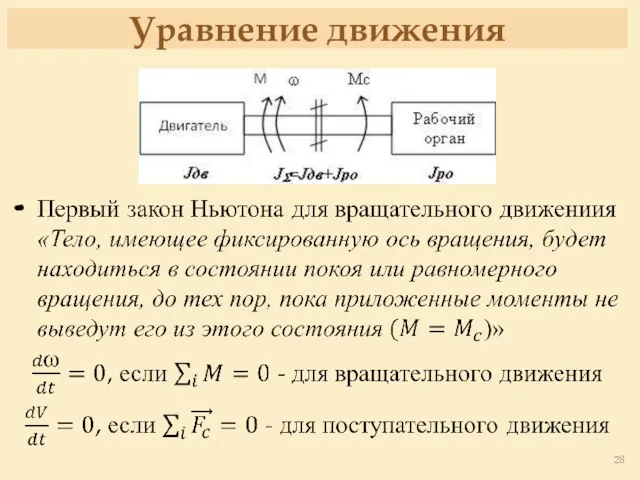
Уравнение движения
Уравнение движения

Графическое определение ωуст
Точка А пересечения механических характеристик двигателя и вентилятора соответствует
Графическое определение ωуст
Точка А пересечения механических характеристик двигателя и вентилятора соответствует
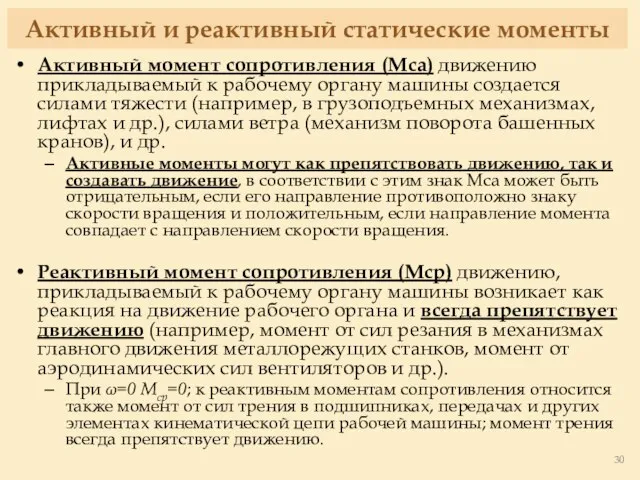
Активный и реактивный статические моменты
Активный момент сопротивления (Мса) движению прикладываемый к
Активный и реактивный статические моменты
Активный момент сопротивления (Мса) движению прикладываемый к


Динамика механической системы
При М∑ =0 (F∑ =0) механическая система находится в
Динамика механической системы
При М∑ =0 (F∑ =0) механическая система находится в
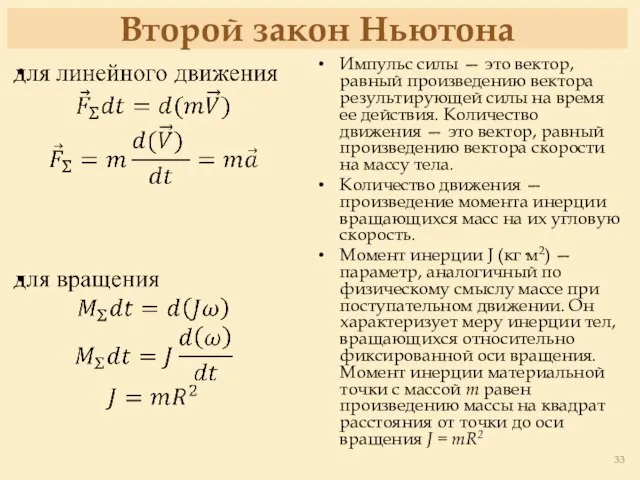
Второй закон Ньютона
Импульс силы — это вектор, равный произведению вектора результирующей
Второй закон Ньютона
Импульс силы — это вектор, равный произведению вектора результирующей

Момент инерции тела есть сумма моментов инерции материальных точек, составляющих это
Момент инерции тела есть сумма моментов инерции материальных точек, составляющих это


 Викторина по ИЗО
Викторина по ИЗО Разработка системы автоматизированного управления участком сушки цеха по производству картофельного крахмала
Разработка системы автоматизированного управления участком сушки цеха по производству картофельного крахмала Диагностика и оценка бриллиантов
Диагностика и оценка бриллиантов Emo
Emo Долгосрочная областная целевая программа Молодежь (2012 - 2016 годы)
Долгосрочная областная целевая программа Молодежь (2012 - 2016 годы) Линейный компрессор LG. Сервисное руководство
Линейный компрессор LG. Сервисное руководство 20170512_ushinskiy
20170512_ushinskiy План-схема перепланировки помещения. Квартира №78
План-схема перепланировки помещения. Квартира №78 Презентация СП 2022
Презентация СП 2022 Проведение санитарно - просветительской деятельности
Проведение санитарно - просветительской деятельности Разработка тестов
Разработка тестов Профессия - нефтяник
Профессия - нефтяник С днем рождения дорогая мамуля
С днем рождения дорогая мамуля Опорная схема выполнения Новогоднего сувенира
Опорная схема выполнения Новогоднего сувенира Благоустройство 2022 схемы
Благоустройство 2022 схемы Новая презентация-1
Новая презентация-1 стандарты общения
стандарты общения Фундамент. Классификация фундаментов
Фундамент. Классификация фундаментов Организационная структура
Организационная структура Электроустановки. Основные понятия
Электроустановки. Основные понятия Капитальный ремонт жилого дома № 21/1 по ул. Голодеда в г. Минске
Капитальный ремонт жилого дома № 21/1 по ул. Голодеда в г. Минске Литературно-краеведческая работа на уроках в начальной школе
Литературно-краеведческая работа на уроках в начальной школе Суперкомпьютеры и их применение
Суперкомпьютеры и их применение Собаки
Собаки Виды сфер и услуг
Виды сфер и услуг портфолио граф. дизайнер
портфолио граф. дизайнер Презентация 1
Презентация 1 Всероссийский день семьи, любви и верности
Всероссийский день семьи, любви и верности