- Фильтрация шумов

Содержание
- 2. Основная цель фильтрации шумов — это получение максимального отношения сигнал/шум
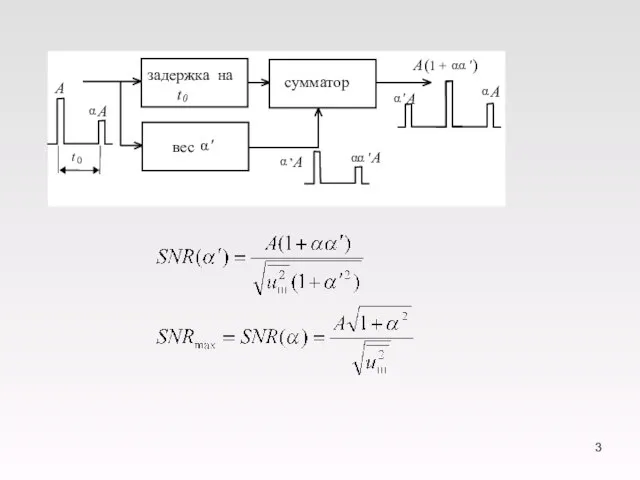
- 3. задержка на t 0 сумматор вес α ′ A α A α ’ A αα ′
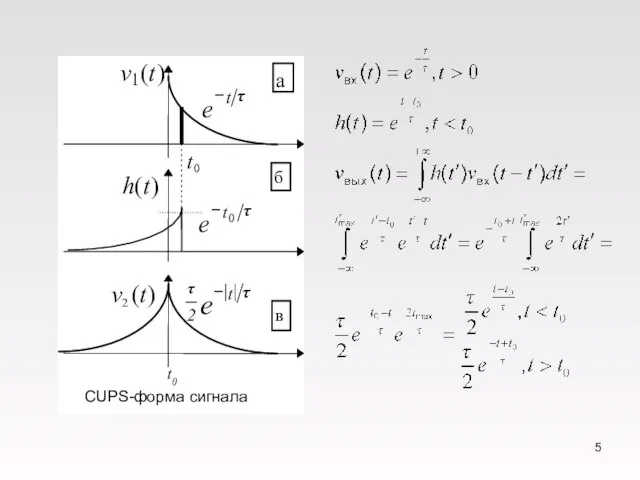
- 5. v t 1 ( ) h t ( ) − t e τ t 0 τ
- 6. Сравнительный анализ фильтров методом шумовых индексов Основные критерии при выборе параметров фильтров: Отношение сигнал/шум (SNR) Загрузочная
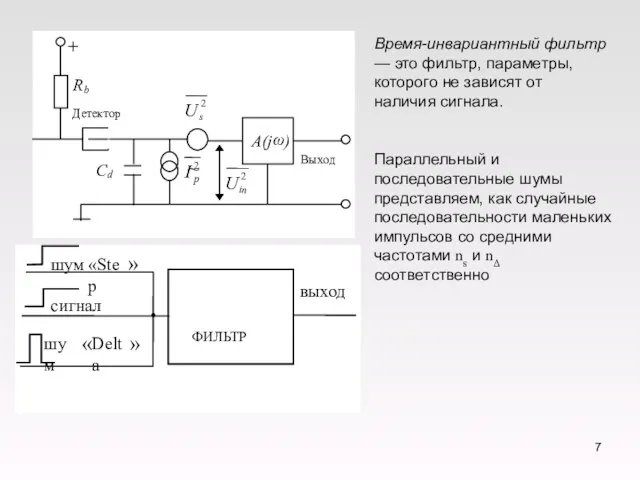
- 7. C d A(j ω ) R b + Детектор Выход ~ Время-инвариантный фильтр — это фильтр,
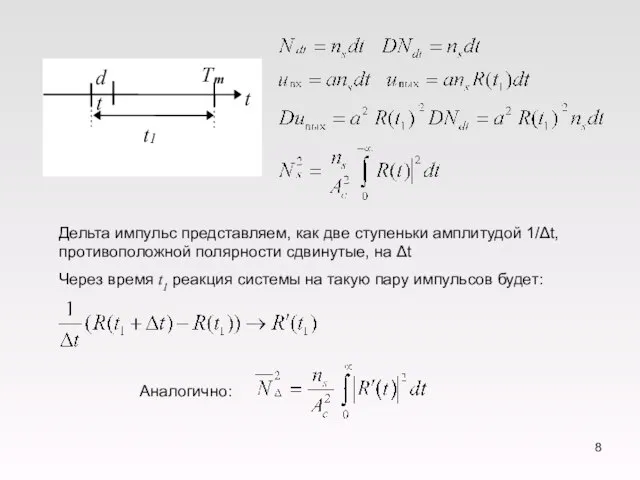
- 8. dt t 1 T m t Дельта импульс представляем, как две ступеньки амплитудой 1/Δt, противоположной полярности
- 9. Пример для RC-CR-фильтра Передаточная функция:
- 10. Пример для трапецеидального фильтра f(t ) τ 1 τ 2 τ 3 t t R(t) R
- 11. При фиксированных Tf и Ts: Сравнение треугольного и RC-CR фильтра Треугольный фильтр: RC-CR фильтр: При оптимальной
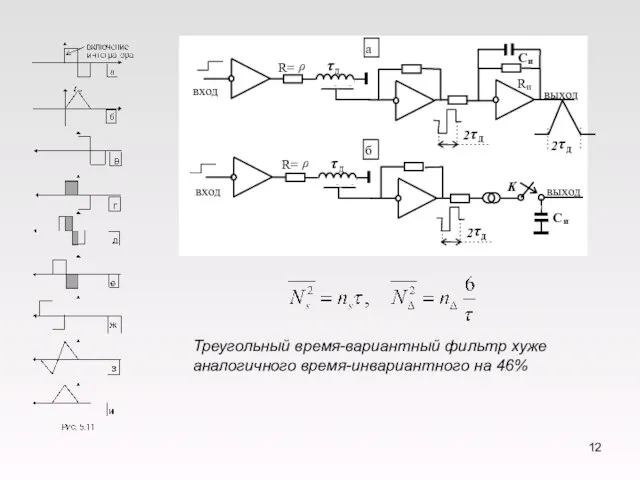
- 12. вход вход R= ρ R= ρ τ д C и R и 2 τ д 2
- 13. Фильтр «RC-CR+управляемый интегратор» t d t g t t g / τ относительный шум 1,0 0,927
- 14. Оптимальный фильтр SNR лучше на 36% по сравнению с RC-CR фильтром
- 16. Скачать презентацию
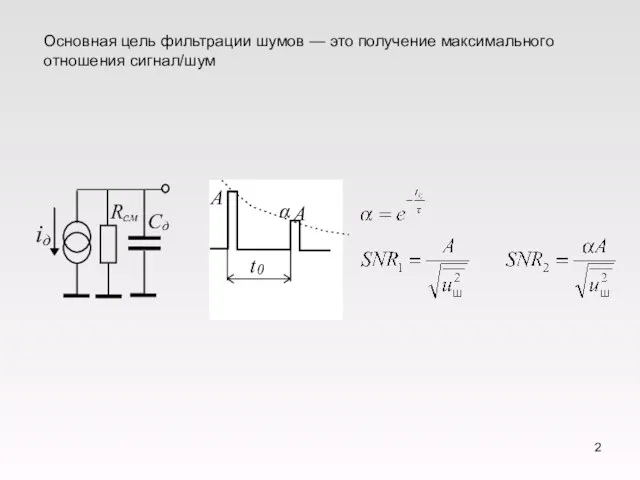
Основная цель фильтрации шумов — это получение максимального отношения сигнал/шум
Основная цель фильтрации шумов — это получение максимального отношения сигнал/шум
задержка на
t
0
сумматор
вес
α
′
A
α
A
α
’
A
αα
′
A
α
′
A
задержка на
t
0
сумматор
вес
α
′
A
α
A
α
’
A
αα
′
A
α
′
A

v
t
1
(
)
h
t
(
)
−
t
e
τ
t
0
τ
2
t
e
−
τ
−
t
e
0
τ
v
t
2
(
)
а
б
в
t0
CUPS-форма сигнала
v
t
1
(
)
h
t
(
)
−
t
e
τ
t
0
τ
2
t
e
−
τ
−
t
e
0
τ
v
t
2
(
)
а
б
в
t0
CUPS-форма сигнала
Сравнительный анализ фильтров методом шумовых индексов
Основные критерии при выборе параметров фильтров:
Отношение
Сравнительный анализ фильтров методом шумовых индексов
Основные критерии при выборе параметров фильтров:
Отношение
C
d
A(j
ω
)
R
b
+
Детектор
Выход
~
Время-инвариантный фильтр — это фильтр, параметры, которого не зависят
C
d
A(j
ω
)
R
b
+
Детектор
Выход
~
Время-инвариантный фильтр — это фильтр, параметры, которого не зависят
dt
t
1
T
m
t
Дельта импульс представляем, как две ступеньки амплитудой 1/Δt, противоположной полярности сдвинутые,
dt
t
1
T
m
t
Дельта импульс представляем, как две ступеньки амплитудой 1/Δt, противоположной полярности сдвинутые,
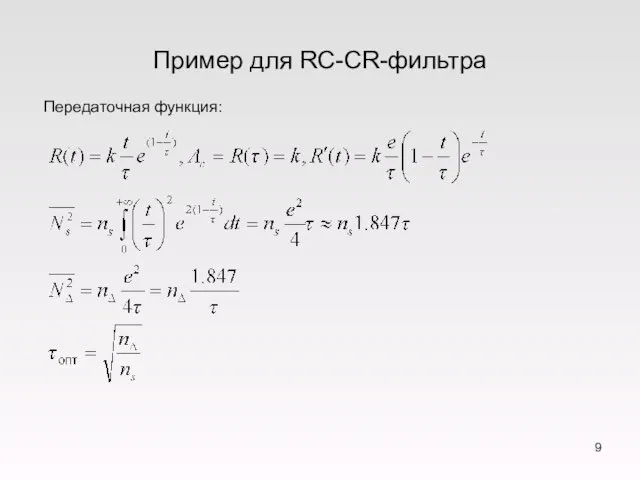
Пример для RC-CR-фильтра
Передаточная функция:
Пример для RC-CR-фильтра
Передаточная функция:
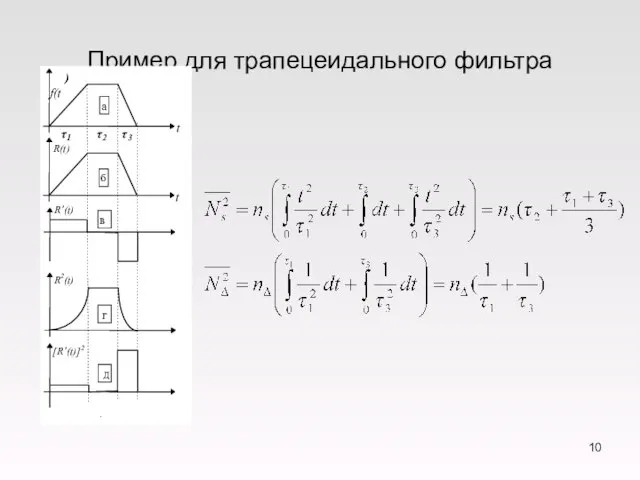
Пример для трапецеидального фильтра
f(t
)
τ
1
τ
2
τ
3
t
t
R(t)
R
′
(t)
R
2
(t)
[R
′
(t)]
2
.
a
б
в
г
д
Пример для трапецеидального фильтра
f(t
)
τ
1
τ
2
τ
3
t
t
R(t)
R
′
(t)
R
2
(t)
[R
′
(t)]
2
.
a
б
в
г
д
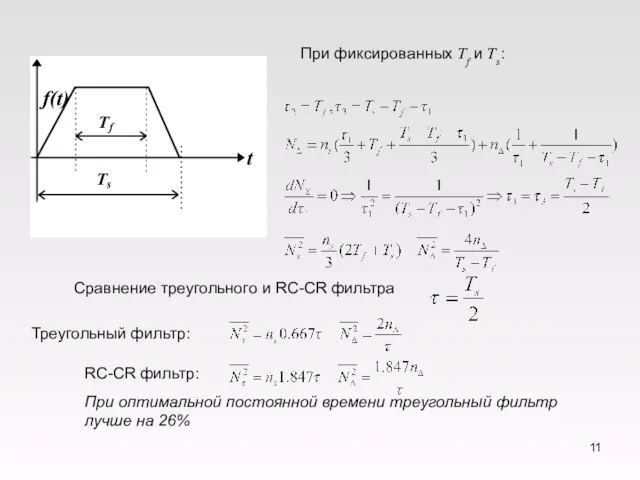
При фиксированных Tf и Ts:
Сравнение треугольного и RC-CR фильтра
Треугольный фильтр:
RC-CR фильтр:
При
При фиксированных Tf и Ts:
Сравнение треугольного и RC-CR фильтра
Треугольный фильтр:
RC-CR фильтр:
При
вход
вход
R=
ρ
R=
ρ
τ
д
C
и
R
и
2
τ
д
2
τ
д
τ
д
2
τ
д
выход
выход
C
и
а
б
K
Треугольный время-вариантный фильтр хуже аналогичного время-инвариантного на 46%
вход
вход
R=
ρ
R=
ρ
τ
д
C
и
R
и
2
τ
д
2
τ
д
τ
д
2
τ
д
выход
выход
C
и
а
б
K
Треугольный время-вариантный фильтр хуже аналогичного время-инвариантного на 46%
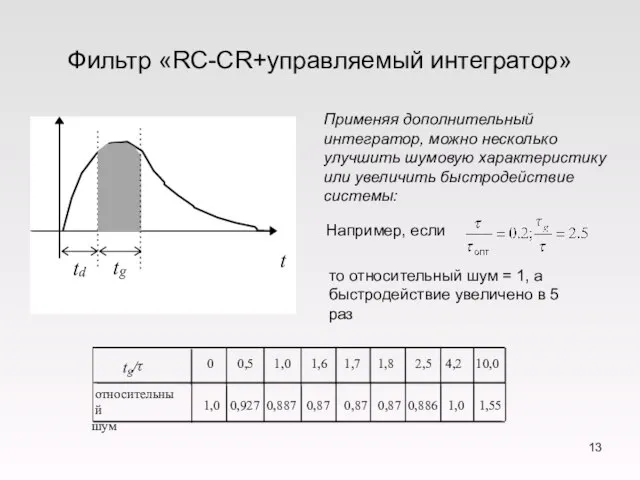
Фильтр «RC-CR+управляемый интегратор»
t
d
t
g
t
t
g
/
τ
относительный
шум
1,0 0,927 0,887
Фильтр «RC-CR+управляемый интегратор»
t
d
t
g
t
t
g
/
τ
относительный
шум
1,0 0,927 0,887
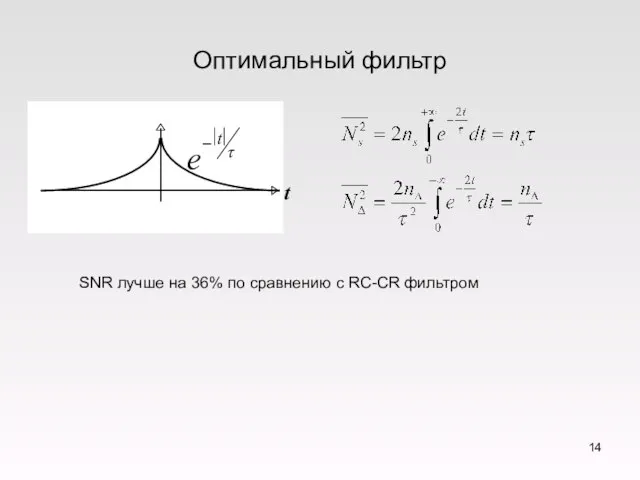
Оптимальный фильтр
SNR лучше на 36% по сравнению с RC-CR фильтром
Оптимальный фильтр
SNR лучше на 36% по сравнению с RC-CR фильтром
 Виртуальная галерея иллюзий
Виртуальная галерея иллюзий Отчёт главы Кондратовского сельского поселения от 24.02.2021
Отчёт главы Кондратовского сельского поселения от 24.02.2021 Стара-Загора. История улицы (Куйбышев)
Стара-Загора. История улицы (Куйбышев) Металлургия өндірісі туралы жалпы мәлімет
Металлургия өндірісі туралы жалпы мәлімет Межотраслевые комплексы. Тест. 9 класс
Межотраслевые комплексы. Тест. 9 класс Офицерская честь
Офицерская честь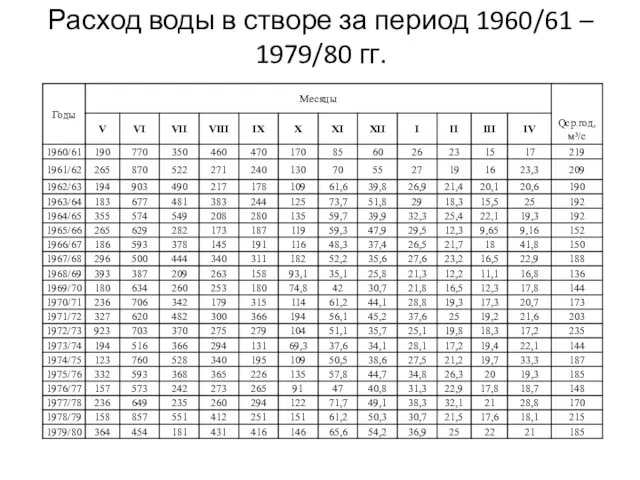 Расход воды в створе за период 1960/61 – 1979/80 гг
Расход воды в створе за период 1960/61 – 1979/80 гг Технологический риск в бурении
Технологический риск в бурении С 8 марта
С 8 марта Презентация1
Презентация1 История моей семьи в документах, фотографиях, воспоминаниях
История моей семьи в документах, фотографиях, воспоминаниях Здоровый образ жизни - ключ к долголетию!
Здоровый образ жизни - ключ к долголетию! P.S.F. Оружие Убеждения
P.S.F. Оружие Убеждения Новоа VIB-номенклатура PK Solo
Новоа VIB-номенклатура PK Solo Услуга Бокс-сервис. Прием и доставка курьером письменной корреспонденции по адресу Клиента
Услуга Бокс-сервис. Прием и доставка курьером письменной корреспонденции по адресу Клиента НПП Преобразователь-комплекс
НПП Преобразователь-комплекс NSTU NETI+
NSTU NETI+ PanTum_КПС1_отред
PanTum_КПС1_отред Science Diplomacy Club 2020/2021
Science Diplomacy Club 2020/2021 Дорожная карта ERP
Дорожная карта ERP Пишем сочинение формата ЕГЭ
Пишем сочинение формата ЕГЭ 20120920_1
20120920_1 родники земли Чушевицкой
родники земли Чушевицкой Древесина - природный материал
Древесина - природный материал Primo
Primo Девочка со скакалкой
Девочка со скакалкой 20170111_zolotoe_koltso_rossii_1
20170111_zolotoe_koltso_rossii_1 Название темы
Название темы