- Модернизация механизма передвижения мостового крана грузоподъемностью 10 т

Содержание
- 2. ЦЕЛИ И ЗАДАЧИ 1 ПРОВСЕТИ АНАЛИЗ ВАРАИНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ МОЕДРНИЗАЦИИ ЭЛЕКТРОПРИВОДА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА, 2 ПРОИЗВЕСТИ
- 3. МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ КРАНОВОЕ ОБОРУДОВАНИЕ ЯВЛЯЕТСЯ ОДНИМ ИЗ ОСНОВНЫХ СРЕДСТВ КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ ВСЕХ
- 4. ОБЩИЙ ВИД МОСТОВОГО КРАНА МЕТАЛЛОКОНСТРУКЦИЯ МОСТОВОГО КРАНА СОСТОИТ ИЗ ДВУХ ОСНОВНЫХ ЧАСТЕЙ: МОСТА И ТЕЛЕЖКИ. МОСТ
- 5. НОМИНАЛЬНЫЕ ПАРАМЕТРЫ КРАНА, КИНЕМАТИЧЕСКАЯ СХЕМА Кинематическая схема механизма передвижения крана с индивидуальным приводом
- 6. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ И СХЕМЕ УПРАВЛЕНИЯ - НАЛИЧИЕ РЕВЕРСИРОВАНИЯ ПРИВОДА; - ВОЗМОЖНОСТЬ РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ
- 7. АНАЛИЗ ВАРИАНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ В КАЧЕСТВЕ ХАРАКТЕРИСТИК ДЛЯ СРАВНЕНИЯ ВЫБРАННЫХ ВАРИАНТОВ БУДЕМ РАССМАТРИВАТЬ СЛЕДУЮЩИЕ: - СТОИМОСТЬ;
- 8. ПАРАМЕТРЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ ТИП ЭЛЕКТРОДВИГАТЕЛЯ АМТК112МА6 МОЩНОСТЬ НОМИНАЛЬНАЯ РН=3 КВТ НОМИНАЛЬНАЯ СКОРОСТЬ ВРАЩЕНИЯ: NН
- 9. НАГРУЗОЧНАЯ ДИАГРАММА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА
- 10. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРАНА
- 11. СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПРИ ОРИЕНТАЦИИ ВРАЩАЮЩЕЙСЯ СИСТЕМЫ КООРДИНАТ ПО ВЕКТОРУ ПОТОКОСЦЕПЛЕНИЯ РОТОРА
- 12. СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ПРИВОДА ПРИ ВЕКТОРНОМ УПРАВЛЕНИИ СО СТАБИЛИЗАЦИЕЙ ПОТОКОСЦЕПЛЕНИЯ РОТОРА В ДЕЙСТВУЮЩИХ ЗНАЧЕНИЯХ ПЕРЕМЕННЫХ
- 13. КОНТУР ТОКА Структурная схема контура тока Переходная характеристика контура тока
- 14. КОНТУР ПОТОКОСЦЕПЛЕНИЯ Реальная структурная схема контура потокосцепления Упрощённая структурная схема контура потокосцепления Переходные характеристики контура потокосцепления,
- 15. КОНТУР МОМЕНТА Структурная схема реального контура момента Структурная схема упрощённого контура момента Переходная характеристика реального контура
- 16. КОНУТР СКОРОСТИ Структурная схема упрощённого контура скорости Структурная схема реального контура скорости с рассчитанными параметрами
- 17. САУ ЭЛЕКТРОПРИВОДА
- 18. ЗАДАТЧИК ИНТЕНСИВНОСТИ Структурная схема S – образного задатчика интенсивности
- 19. ПЕРЕХОДНЫЕ ПРОЦЕССЫ САУ ЭЛЕКТРОПРИВОДА Графики сигнала задания на скорость и скорости электропривода График развиваемого двигателем момента
- 21. Скачать презентацию
ЦЕЛИ И ЗАДАЧИ
1 ПРОВСЕТИ АНАЛИЗ ВАРАИНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ МОЕДРНИЗАЦИИ ЭЛЕКТРОПРИВОДА МЕХАНИЗМА
ЦЕЛИ И ЗАДАЧИ
1 ПРОВСЕТИ АНАЛИЗ ВАРАИНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ МОЕДРНИЗАЦИИ ЭЛЕКТРОПРИВОДА МЕХАНИЗМА
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ
КРАНОВОЕ ОБОРУДОВАНИЕ ЯВЛЯЕТСЯ ОДНИМ ИЗ ОСНОВНЫХ
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ
КРАНОВОЕ ОБОРУДОВАНИЕ ЯВЛЯЕТСЯ ОДНИМ ИЗ ОСНОВНЫХ
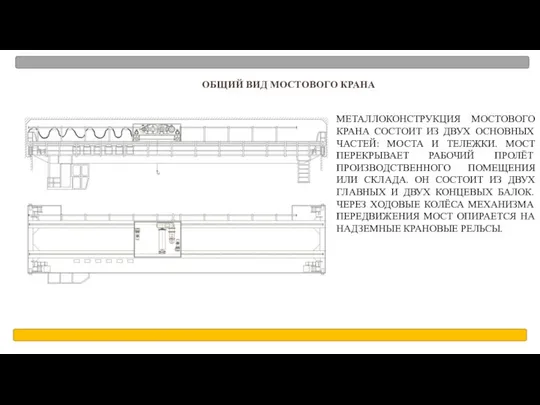
ОБЩИЙ ВИД МОСТОВОГО КРАНА
МЕТАЛЛОКОНСТРУКЦИЯ МОСТОВОГО КРАНА СОСТОИТ ИЗ ДВУХ ОСНОВНЫХ ЧАСТЕЙ:
ОБЩИЙ ВИД МОСТОВОГО КРАНА
МЕТАЛЛОКОНСТРУКЦИЯ МОСТОВОГО КРАНА СОСТОИТ ИЗ ДВУХ ОСНОВНЫХ ЧАСТЕЙ:
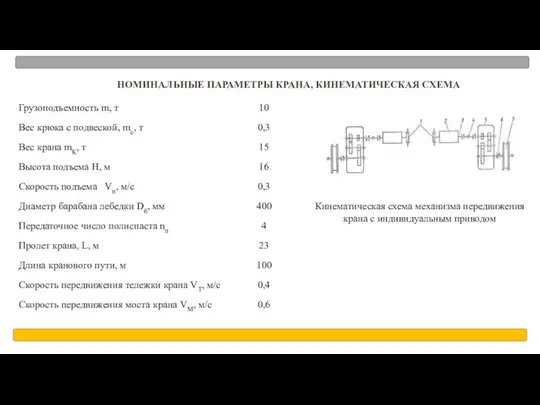
НОМИНАЛЬНЫЕ ПАРАМЕТРЫ КРАНА, КИНЕМАТИЧЕСКАЯ СХЕМА
Кинематическая схема механизма передвижения
крана с индивидуальным приводом
НОМИНАЛЬНЫЕ ПАРАМЕТРЫ КРАНА, КИНЕМАТИЧЕСКАЯ СХЕМА
Кинематическая схема механизма передвижения
крана с индивидуальным приводом
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ И СХЕМЕ УПРАВЛЕНИЯ
- НАЛИЧИЕ РЕВЕРСИРОВАНИЯ ПРИВОДА;
- ВОЗМОЖНОСТЬ
ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ И СХЕМЕ УПРАВЛЕНИЯ
- НАЛИЧИЕ РЕВЕРСИРОВАНИЯ ПРИВОДА;
- ВОЗМОЖНОСТЬ

АНАЛИЗ ВАРИАНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ
В КАЧЕСТВЕ ХАРАКТЕРИСТИК ДЛЯ СРАВНЕНИЯ ВЫБРАННЫХ ВАРИАНТОВ БУДЕМ
АНАЛИЗ ВАРИАНТОВ ТЕХНИЧЕСКИХ РЕШЕНИЙ
В КАЧЕСТВЕ ХАРАКТЕРИСТИК ДЛЯ СРАВНЕНИЯ ВЫБРАННЫХ ВАРИАНТОВ БУДЕМ
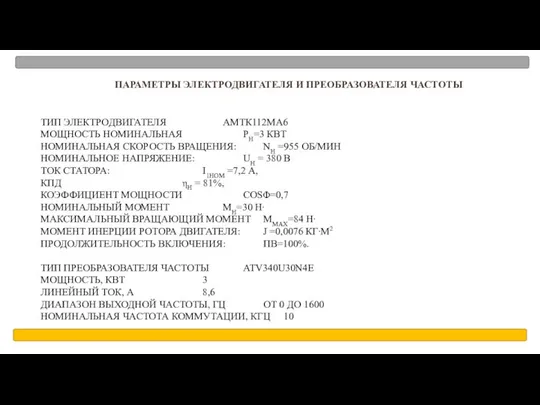
ПАРАМЕТРЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ
ТИП ЭЛЕКТРОДВИГАТЕЛЯ АМТК112МА6
МОЩНОСТЬ НОМИНАЛЬНАЯ РН=3 КВТ
НОМИНАЛЬНАЯ СКОРОСТЬ
ПАРАМЕТРЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ
ТИП ЭЛЕКТРОДВИГАТЕЛЯ АМТК112МА6
МОЩНОСТЬ НОМИНАЛЬНАЯ РН=3 КВТ
НОМИНАЛЬНАЯ СКОРОСТЬ
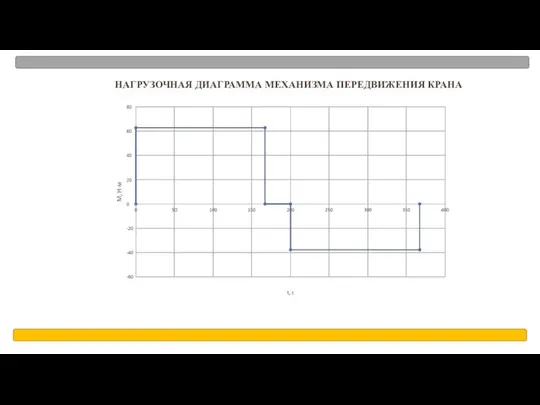
НАГРУЗОЧНАЯ ДИАГРАММА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА
НАГРУЗОЧНАЯ ДИАГРАММА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА
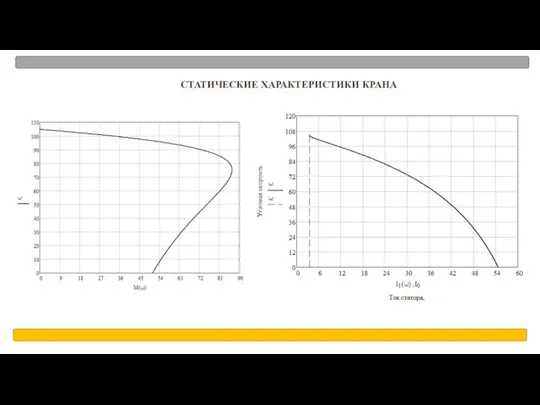
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРАНА
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРАНА
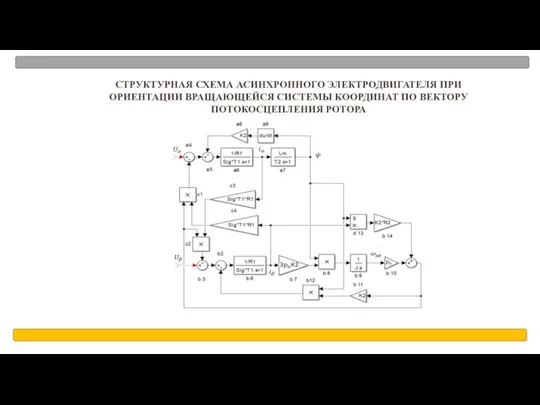
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПРИ ОРИЕНТАЦИИ ВРАЩАЮЩЕЙСЯ СИСТЕМЫ КООРДИНАТ ПО ВЕКТОРУ
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПРИ ОРИЕНТАЦИИ ВРАЩАЮЩЕЙСЯ СИСТЕМЫ КООРДИНАТ ПО ВЕКТОРУ
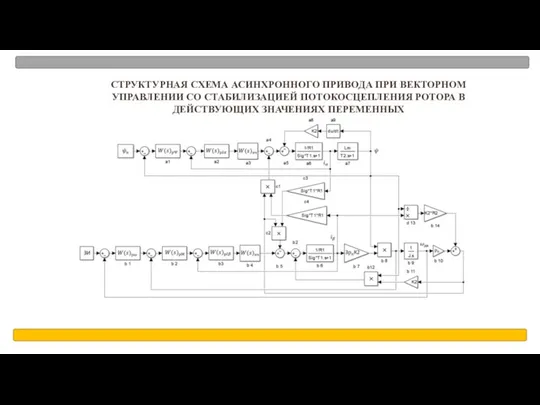
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ПРИВОДА ПРИ ВЕКТОРНОМ УПРАВЛЕНИИ СО СТАБИЛИЗАЦИЕЙ ПОТОКОСЦЕПЛЕНИЯ РОТОРА
СТРУКТУРНАЯ СХЕМА АСИНХРОННОГО ПРИВОДА ПРИ ВЕКТОРНОМ УПРАВЛЕНИИ СО СТАБИЛИЗАЦИЕЙ ПОТОКОСЦЕПЛЕНИЯ РОТОРА
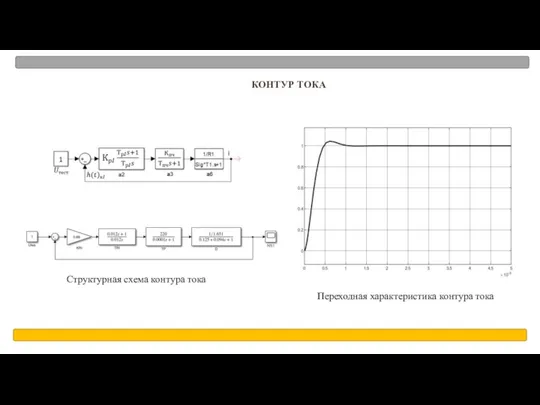
КОНТУР ТОКА
Структурная схема контура тока
Переходная характеристика контура тока
КОНТУР ТОКА
Структурная схема контура тока
Переходная характеристика контура тока
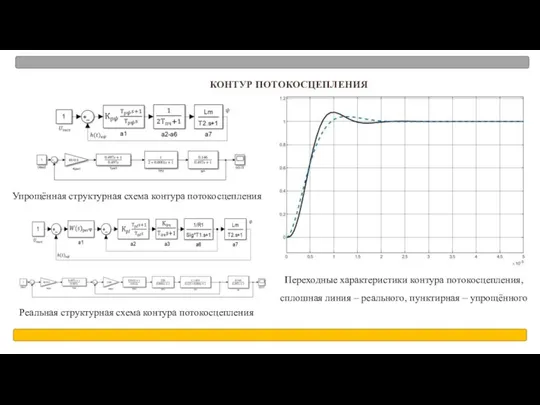
КОНТУР ПОТОКОСЦЕПЛЕНИЯ
Реальная структурная схема контура потокосцепления
Упрощённая структурная схема контура потокосцепления
КОНТУР ПОТОКОСЦЕПЛЕНИЯ
Реальная структурная схема контура потокосцепления
Упрощённая структурная схема контура потокосцепления
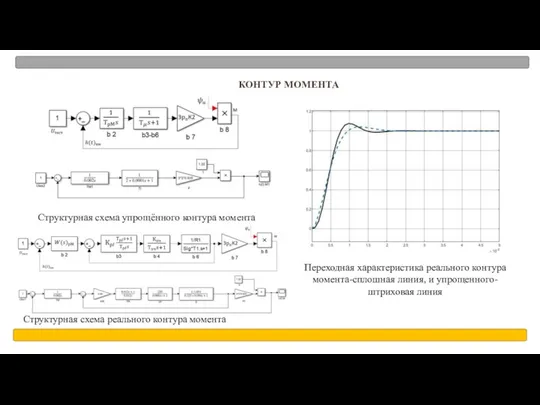
КОНТУР МОМЕНТА
Структурная схема реального контура момента
Структурная схема упрощённого контура момента
Переходная характеристика
КОНТУР МОМЕНТА
Структурная схема реального контура момента
Структурная схема упрощённого контура момента
Переходная характеристика
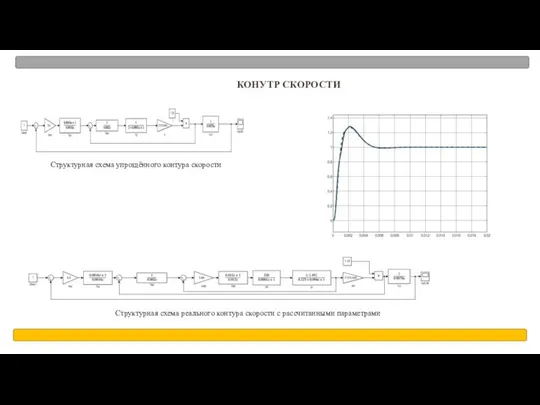
КОНУТР СКОРОСТИ
Структурная схема упрощённого контура скорости
Структурная схема реального контура скорости с
КОНУТР СКОРОСТИ
Структурная схема упрощённого контура скорости
Структурная схема реального контура скорости с
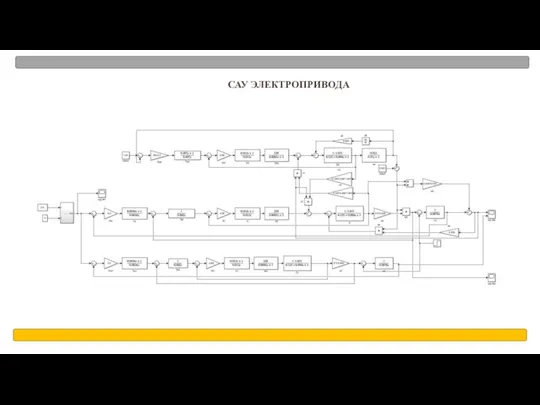
САУ ЭЛЕКТРОПРИВОДА
САУ ЭЛЕКТРОПРИВОДА
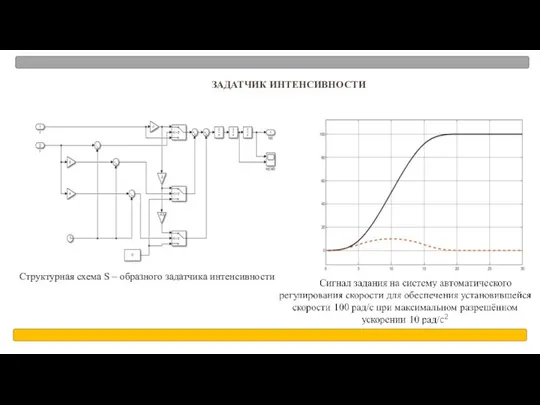
ЗАДАТЧИК ИНТЕНСИВНОСТИ
Структурная схема S – образного задатчика интенсивности
ЗАДАТЧИК ИНТЕНСИВНОСТИ
Структурная схема S – образного задатчика интенсивности
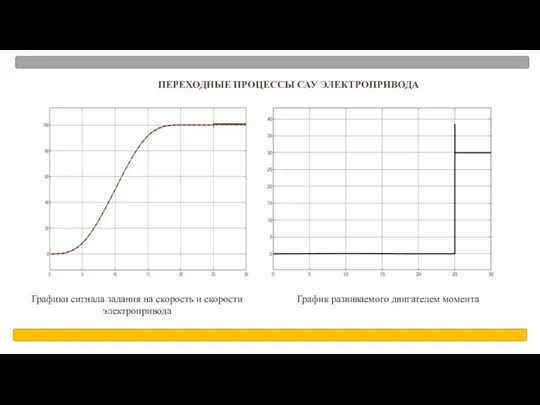
ПЕРЕХОДНЫЕ ПРОЦЕССЫ САУ ЭЛЕКТРОПРИВОДА
Графики сигнала задания на скорость и скорости электропривода
График
ПЕРЕХОДНЫЕ ПРОЦЕССЫ САУ ЭЛЕКТРОПРИВОДА
Графики сигнала задания на скорость и скорости электропривода
График
 клуб бардовской песни
клуб бардовской песни 20110527_Interaktivnyy_plakat_Sinkveyn
20110527_Interaktivnyy_plakat_Sinkveyn Гарнизонная церковь в честь Покрова Богородицы в г. Орле
Гарнизонная церковь в честь Покрова Богородицы в г. Орле Предприятие по добыче, обогащению и переработке руд Тырныаузского вольфрамо-молибденового месторождения. Гидрометаллургический
Предприятие по добыче, обогащению и переработке руд Тырныаузского вольфрамо-молибденового месторождения. Гидрометаллургический Бейджики 1-Б
Бейджики 1-Б Сервис буровых растворов
Сервис буровых растворов 2 Kap2
2 Kap2 outlook
outlook Проектирование изделий из тканей, содержащих искусственные волокна, из искусственных кож, замши, тканей с пленочным покрытием
Проектирование изделий из тканей, содержащих искусственные волокна, из искусственных кож, замши, тканей с пленочным покрытием Программируемые логические контроллеры
Программируемые логические контроллеры 20140123_agressiya_1_u_detey_kak_sledstvie_uvlecheniya_kompyuternymi_-_kopiya_0
20140123_agressiya_1_u_detey_kak_sledstvie_uvlecheniya_kompyuternymi_-_kopiya_0 БОШКА
БОШКА Работа с фрагментами в Paint
Работа с фрагментами в Paint Общий прием сложения с переходом через десяток
Общий прием сложения с переходом через десяток kiber
kiber Портфолио Арсенұлы Әлнұр Арсен
Портфолио Арсенұлы Әлнұр Арсен Асинхронные машины. Конструкция и принцип действия
Асинхронные машины. Конструкция и принцип действия педсовет авг 20
педсовет авг 20 ФГОС ОО формирование компетенций ср-ми ДО
ФГОС ОО формирование компетенций ср-ми ДО Резюме2 (2)
Резюме2 (2) Угловые соединения
Угловые соединения Смена владельца сим-карты, МТС
Смена владельца сим-карты, МТС 28 листы рекомендаций
28 листы рекомендаций Ребенок с ограниченными возможностями здоровья в современном российском обществе
Ребенок с ограниченными возможностями здоровья в современном российском обществе Переробка та утилізація відходів нафтопереробної галузі
Переробка та утилізація відходів нафтопереробної галузі Очистные сооружения хозяйственно-бытовых стоков
Очистные сооружения хозяйственно-бытовых стоков Результаты работы с механизированным фондом скважин ЦДНГ №8 за 1 кв. 2015 г
Результаты работы с механизированным фондом скважин ЦДНГ №8 за 1 кв. 2015 г Мультимедийное оборудование в профессиональной деятельности
Мультимедийное оборудование в профессиональной деятельности