Основные механизмы ГПМ. Их конструкция и расчет, конструктивные схемы ГПМ, технологические процессы и экономические показатели
- Основные механизмы ГПМ. Их конструкция и расчет, конструктивные схемы ГПМ, технологические процессы и экономические показатели

Содержание
- 2. В состав ГПМ может входить несколько рабочих механизмов – подъема груза, передвижения и поворота крана, изменения
- 3. Механизм подъема груза, кинематические схемы которых даны на рис.48 состоят из следующих основных частей: полиспаста, грузозахватного
- 4. Кинематическая схема механизма подъема с крюковой подвеской представлена на рис.48а. Электродвигатель 1 соединен с цилиндрическим редуктором
- 5. Кинематическая схема механизма подъема с грузовым электромагнитом 8 отличается от обычной наличием дополнительного барабана 9 для
- 6. где ωб, ωк – условные скорости вращения соответственно канатного и кабельного барабанов; V1 – скорость подъема
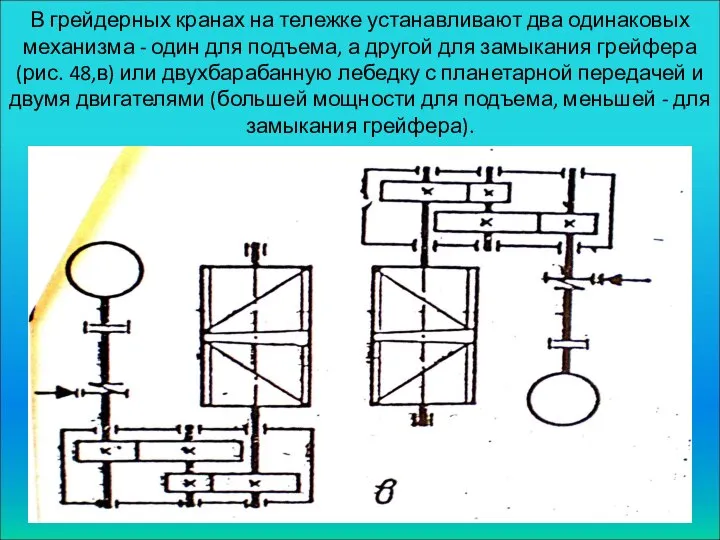
- 7. В грейдерных кранах на тележке устанавливают два одинаковых механизма - один для подъема, а другой для
- 8. Механизмы с планетарными. На рис. 48,г показана кинематическая схема механизма с двух двигательным приводом и планетарным
- 9. Механизм подъема позволяет работать на четырех скоростях: 1- максимальная скорость при вращении обоих двигателей в одном
- 10. В башенных кранах применяют механизмы подъема с фланцевым электродвигателем. Скорость опускания груза в широких пределах можно
- 11. В электроталях применяются оригинальная компактная схема механизма подъема с вмонтированным в барабан двигателем и соосным редуктором.
- 12. Силовые и скоростные зависимости двух типов полиспастов можно проследить на соответствующих подвижных блоках. Для силового полиспаста
- 13. Для скоростного полиспаста (рис.49,б) сила на поршне и скорость будут равны: КПД канатного блока учитывает потери
- 14. Одинарные полиспасты. Верхние блоки неподвижны (в пространстве), нижние подвижны – перемещаются вместе с грузом (рис.50,а) В
- 15. При подъеме груза вследствие потерь в блоках и от жесткости каната при изгибе натяжение в ветвях
- 16. КПД полиспаста определяется как отношение полезной работы Gh при подъеме груза на высоту h к затраченной
- 17. - Сдвоенные полиспасты (рис.50,б, в) обеспечивают строго вертикальное перемещение груза. Реакции в опорах барабана распределяются равномерно.
- 18. Сдвоенный полиспаст состоит из двух одинарных полиспастов с уравнительным блоком. На барабан (с правой и левой
- 19. Кратность сдвоенного полиспаста определяется так: т.е. равна половине ветвей, на которых подвешен груз. Или числу подвижных
- 20. Кратность полиспастов механизмов подъема зависит от грузоподъемности и определяется технико-экономическими расчетами. Чем больше кратность полиспаста. Тем
- 21. Механизмы передвижения. Основным типом механизмов передвижения в кранах являются рельсовые механизмы, реже на пневмоходу. По месту
- 22. 2. механизмы, расположенные вне перемещаемого объекта с гибкой (канатной или цепной) тягой (рис.70, в) 3. механизмы,
- 23. По конструкции ходовой части крана: колесные, гусеничные, шагающие; По роду привода: электрический, д.в.с., гидравлический, пневматический. Наиболее
- 24. В современных конструкциях кранов наибольшее распространение получили механизмы с раздельным приводом. Это отвечает современным принципам конструирования
- 25. Для нормальной работы механизмов должна быть обеспечена электрическая синхронизация работы отдельных двигателей во избежание перекоса моста,
- 26. Механизмы передвижения с центральным приводом являются простыми, надежными, но вместе с тем имеют недостатки – большая
- 27. Для передвижения тележек применяются кинематические схемы согласно (рис.70а,б, 71б), а также механизмы с гибкой тягой –
- 28. В последнее время все большее применение находят гидравлические механизмы передвижения кранов (рис.70,д). Гидравлические приводы устанавливают непосредственно
- 29. Сопротивление передвижению рельсовых механизмов. Сопротивление передвижению при установившемся движении рельсового механизма в общем случае зависит от
- 30. Сопротивление перекатыванию зависит от упругих свойств соприкасающихся тел кривизны их поверхностей, упругих микроперемещений в зоне контакта,
- 31. Расчетная схема механизма передвижения приведена на рис.72,а. Значение сил: где - сила трения в опорах; -
- 32. Сопротивление теоретически определить нельзя из-за неопределенности всех фактов, влияющих на трение в ребрах, ступиц и др..
- 33. уклон подкранового пути в зависимости от типа крана, находятся в пределах 0,001…0,01: Усилие от ветровой нагрузки
- 34. Ветровую нагрузку на груз рассчитывают при нахождении его в крайнем верхнем положении (следует принимать не менее
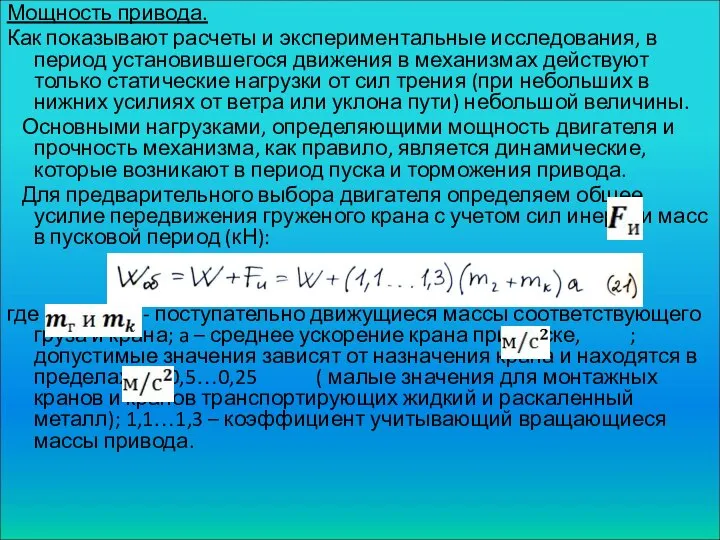
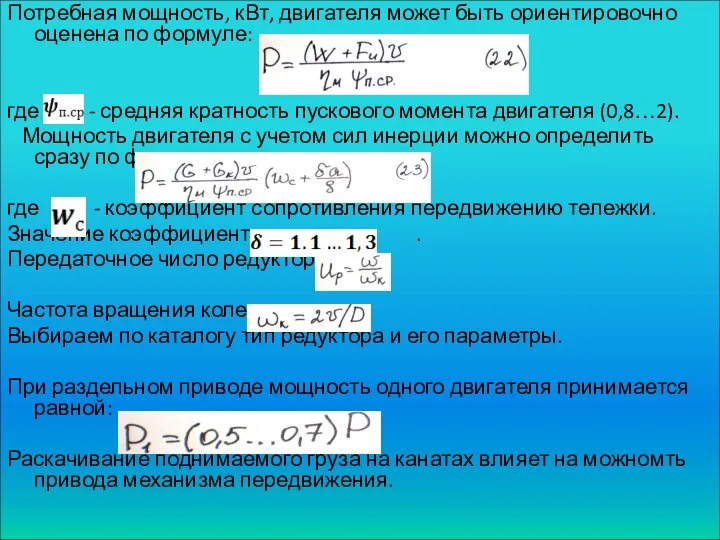
- 35. Мощность привода. Как показывают расчеты и экспериментальные исследования, в период установившегося движения в механизмах действуют только
- 36. Потребная мощность, кВт, двигателя может быть ориентировочно оценена по формуле: где - средняя кратность пускового момента
- 37. В общем случае мощность двигателя механизма передвижения с учетом сил инерции при пуске и раскачивании груза
- 38. Механизмы изменения вылета. В поворотных стреловых кранах механизмы изменения вылета предназначены для перемещения груза в радиальном
- 39. Механизмы изменения вылета качанием стрелы бывают следующих типов (рис.79): полиспастные (а), гидравлические (б), реечные (в), винтовые
- 40. Наиболее широко применяются полиспастные механизмы вследствие простоты устройства и эксплуатации, небольшой массы. Все большее распространение получает
- 41. Полиспастные механизмы изменения вылета аналогичны механизмам подъема и состоят из двигателя, редуктора, тормоза и барабана. Натяжение
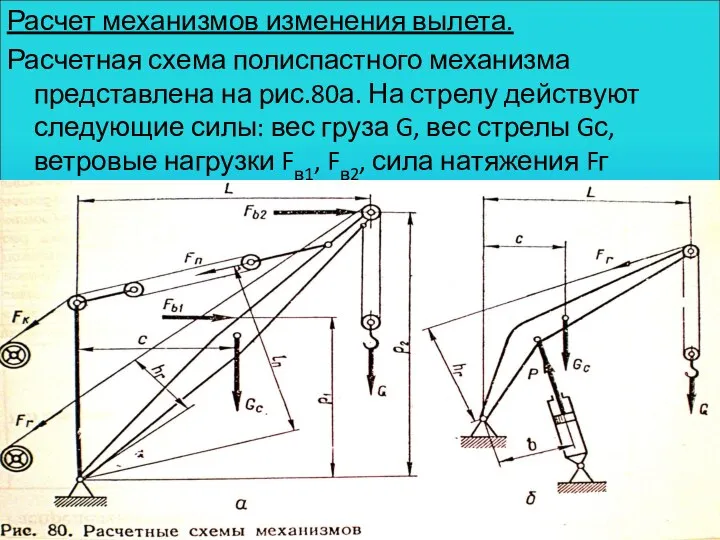
- 42. Расчет механизмов изменения вылета. Расчетная схема полиспастного механизма представлена на рис.80а. На стрелу действуют следующие силы:
- 43. Расчет включает определение мощности электродвигателя по средней и среднеквадратичной нагрузке, проверку по максимальным нагрузкам при пуске
- 44. Строят нагрузочную диаграмму и определяют среднеквадратичную нагрузку: где - усилий в полиспастах для разных промежуточных узлов
- 45. Мощность двигателя (статическую) можно определить также по среднему усилию в канате , который наматывается на барабан
- 46. Время подъема стрелы где - скорость движения груза при подъеме стрелы или линейная скорость движения конца
- 47. Для получения необходимого времени торможения тормоз следует отрегулировать на меньший тормозной момент или на валу двигателя
- 48. Механизмы поворота кранов. Особенностью механизмов поворота крана являются малые скорости вращения и большие передаточные числа редукторов.
- 49. По конструкции (рис.82): - с горизонтальным расположением двигателя и червячным (а) или зубчатым (б) редукторами, в
- 50. По количеству двигателей: однодвигательные (а-д) рис.82,е :с одной приводной шестерней и двумя шестернями, передающими вращение на
- 51. В основном механизмы поворота однодвигательные, но для мощных кранов с большим вылетом применяются многодвигательные. При больших
- 52. Схемы механизмов поворота с червячным и зубчатым редукторами понятны на рис.82, а, б. Поэтому целесообразнее остановиться
- 53. На рис.82,д показан механизм с волновым редуктором с большим передаточным числом (1640), что позволяет исключить применение
- 54. В новых кранах применяются планетарные механизмы поворота, кинематическая схема которых приведена на рис.82г. Передаточное число редуктора
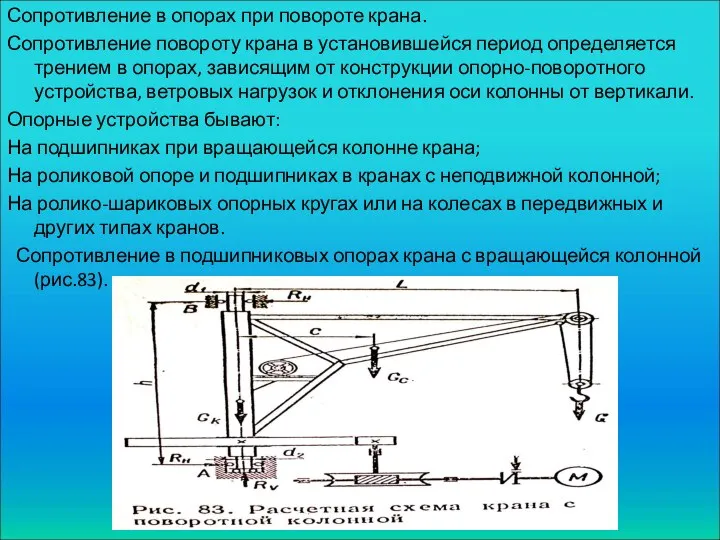
- 55. Сопротивление в опорах при повороте крана. Сопротивление повороту крана в установившейся период определяется трением в опорах,
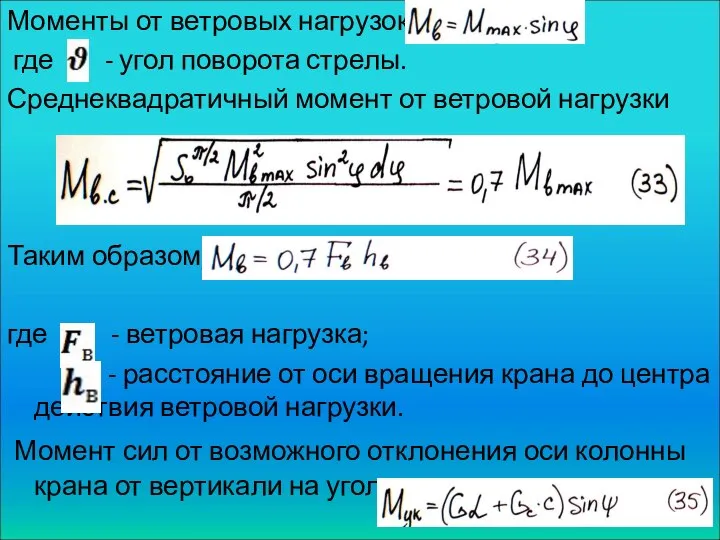
- 56. Вертикальная реакция, воспринимаемая подпятником, где - соответственно вес груза, колонны и стрелы. Горизонтальные реакции находим из
- 57. Моменты от ветровых нагрузок где - угол поворота стрелы. Среднеквадратичный момент от ветровой нагрузки Таким образом,
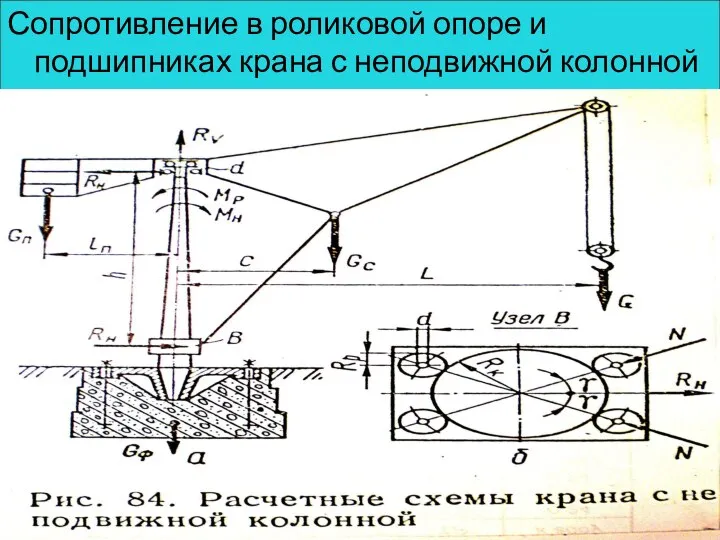
- 58. Сопротивление в роликовой опоре и подшипниках крана с неподвижной колонной (рис.84).
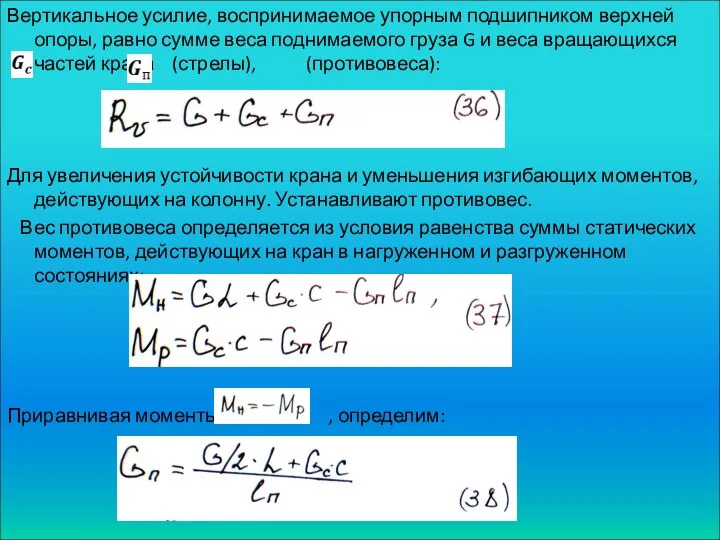
- 59. Вертикальное усилие, воспринимаемое упорным подшипником верхней опоры, равно сумме веса поднимаемого груза G и веса вращающихся
- 60. В связи с переменным весом груза на крюке кран не бывает полностью уравновешен: при минимальной грузоподъемности
- 61. Момент сил трения в упорном подшипнике: Усилие, действующее на каждый из двух роликов (рис.84,б):
- 62. Момент сил трения в нижнем опорно-поворотном устройстве: где – радиус ролика, - катающий радиус колонны; k
- 63. Сопротивление в роликово-шариковых опорных кругах (рис.85). В шариковых и роликовых опорно-поворотных устройствах все действующие силы можно
- 64. Момент сил сопротивления вращению в шариковых и роликовых опорах определяется по эмпирической формуле: где - средний
- 65. Время пуска и торможения механизма принимается согласно рекомендациям ВНИИПТМАШ такими, чтобы линейное ускорение конца стрелы было
- 66. Тормозной момент: или где - продолжительность торможения; - передаточное число механизма; - КПД механизма. Если тормоз
- 67. Упругими звеньями между массами являются валы, муфты и зубчатые передачи, обладающие суммарной жесткостью С. Дифференциальное управление
- 68. Уравнение движения масс где - пусковой момент двигателя; приведенный к валу двигателя момент от сил сопротивления
- 69. После решения системы дифференциальных уравнений динамические моменты в линии привода механизма с учетом упругих колебаний системы
- 70. При значениях и динамические нагрузки в механизме становятся максимальными: Аналогичным путем определяется динамические моменты в приводе
- 71. Продолжительность цикла состоит из суммарного времени выполнения отдельных операций с учетом их совмещения где - коэффициент
- 72. При работе крана с насыпными грузами где V- вместимость грейфера, бадьи и т.п., ; - насыпная
- 73. Задачей конструкторов является снижение удельных показателей за счет унификации, блочности и взаимозаменяемости узлов, применения новых материалов
- 75. Скачать презентацию
В состав ГПМ может входить несколько рабочих механизмов – подъема груза,
В состав ГПМ может входить несколько рабочих механизмов – подъема груза,
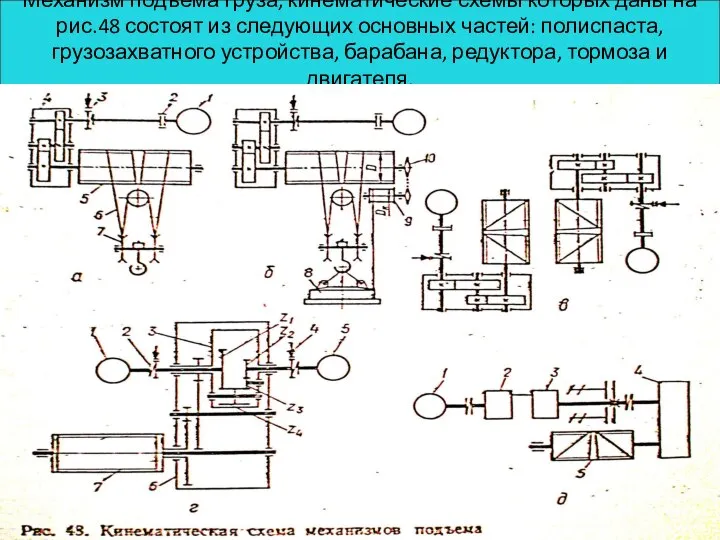
Механизм подъема груза, кинематические схемы которых даны на рис.48 состоят из
Механизм подъема груза, кинематические схемы которых даны на рис.48 состоят из
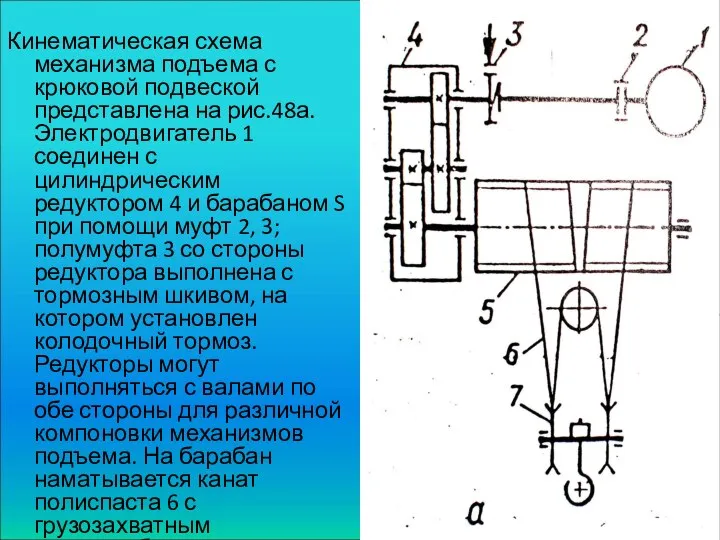
Кинематическая схема механизма подъема с крюковой подвеской представлена на рис.48а. Электродвигатель
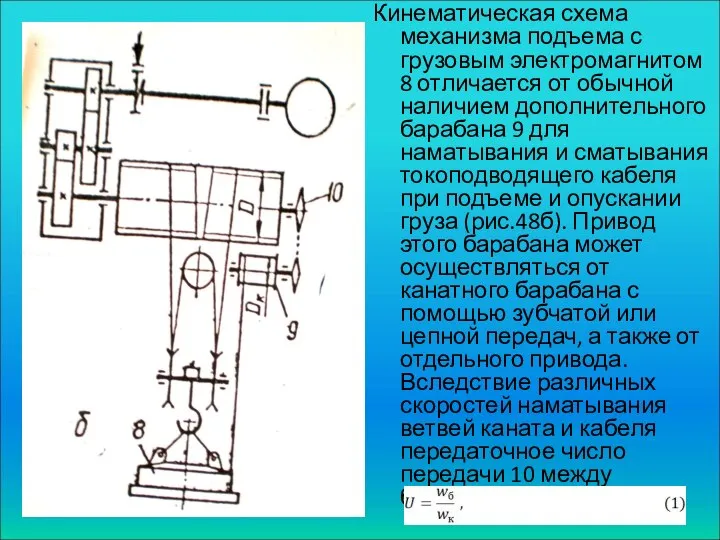
Кинематическая схема механизма подъема с грузовым электромагнитом 8 отличается от обычной
Кинематическая схема механизма подъема с грузовым электромагнитом 8 отличается от обычной

где ωб, ωк – условные скорости вращения соответственно канатного и кабельного
где ωб, ωк – условные скорости вращения соответственно канатного и кабельного
В грейдерных кранах на тележке устанавливают два одинаковых механизма - один
В грейдерных кранах на тележке устанавливают два одинаковых механизма - один

Механизмы с планетарными. На рис. 48,г показана кинематическая схема механизма
Механизмы с планетарными. На рис. 48,г показана кинематическая схема механизма
Механизм подъема позволяет работать на четырех скоростях: 1- максимальная скорость при
Механизм подъема позволяет работать на четырех скоростях: 1- максимальная скорость при
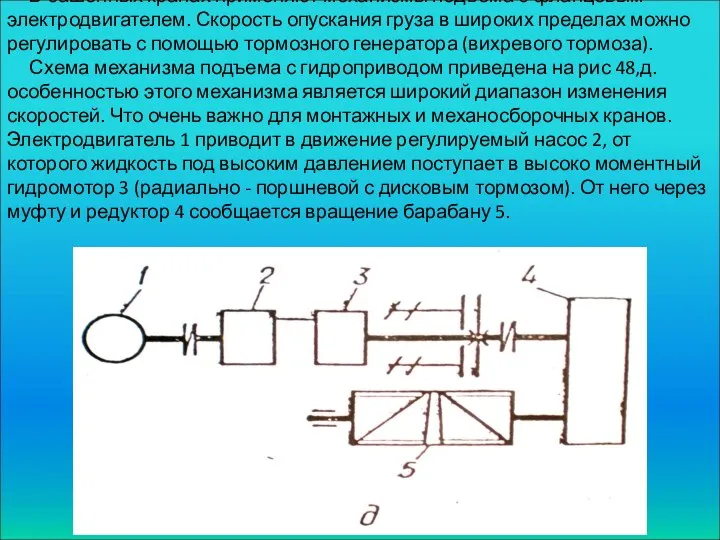
В башенных кранах применяют механизмы подъема с фланцевым электродвигателем. Скорость
В башенных кранах применяют механизмы подъема с фланцевым электродвигателем. Скорость
В электроталях применяются оригинальная компактная схема механизма подъема с вмонтированным в
В электроталях применяются оригинальная компактная схема механизма подъема с вмонтированным в
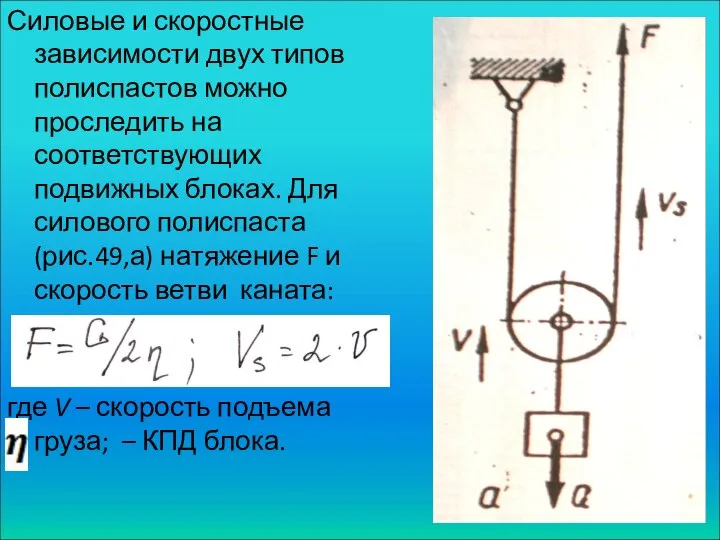
Силовые и скоростные зависимости двух типов полиспастов можно проследить на соответствующих
Силовые и скоростные зависимости двух типов полиспастов можно проследить на соответствующих

Для скоростного полиспаста (рис.49,б) сила на поршне и скорость будут равны:
КПД
Для скоростного полиспаста (рис.49,б) сила на поршне и скорость будут равны:
КПД
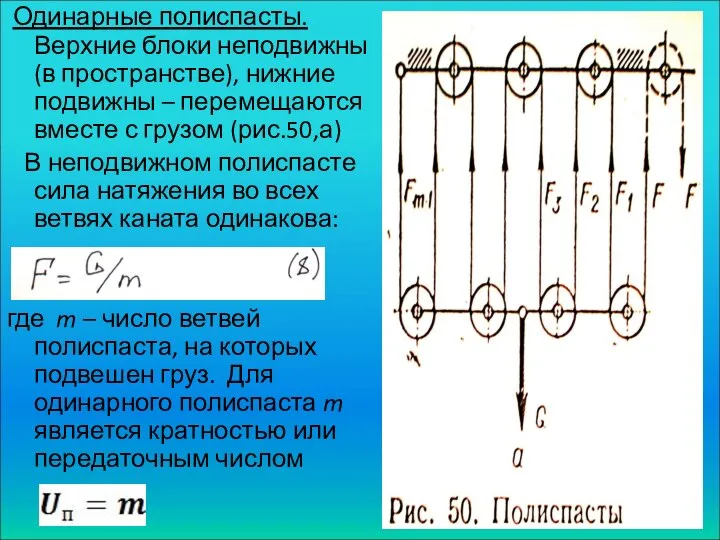
Одинарные полиспасты. Верхние блоки неподвижны (в пространстве), нижние подвижны –
Одинарные полиспасты. Верхние блоки неподвижны (в пространстве), нижние подвижны –
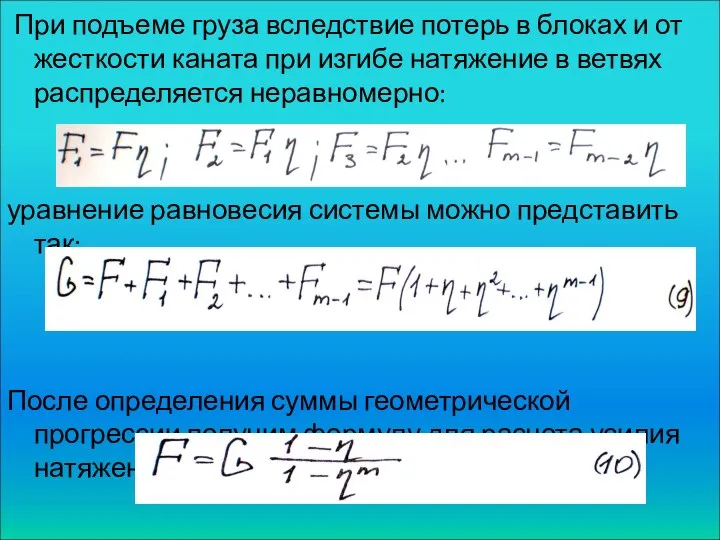
При подъеме груза вследствие потерь в блоках и от жесткости
При подъеме груза вследствие потерь в блоках и от жесткости
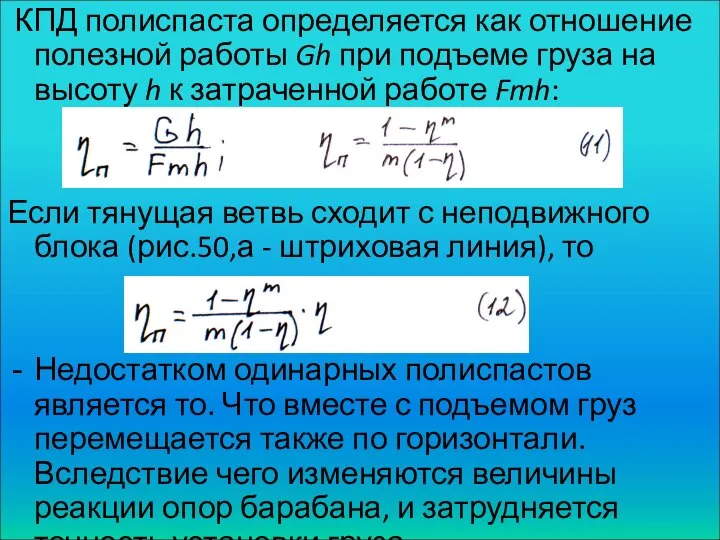
КПД полиспаста определяется как отношение полезной работы Gh при подъеме
КПД полиспаста определяется как отношение полезной работы Gh при подъеме
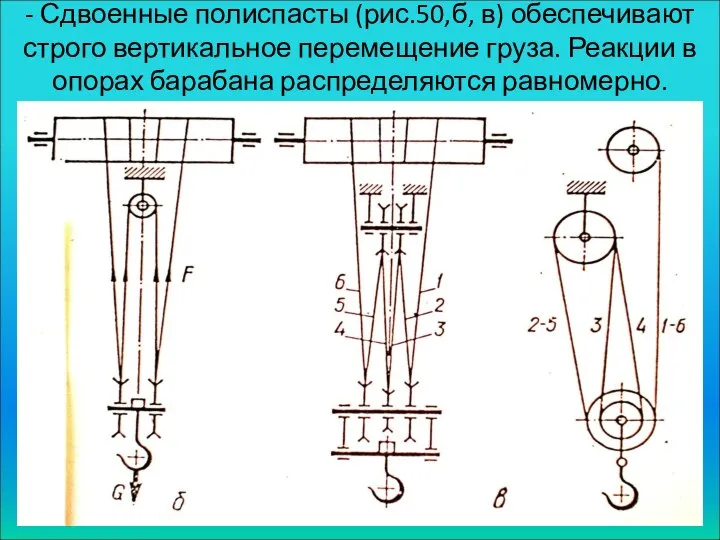
- Сдвоенные полиспасты (рис.50,б, в) обеспечивают строго вертикальное перемещение груза. Реакции
- Сдвоенные полиспасты (рис.50,б, в) обеспечивают строго вертикальное перемещение груза. Реакции
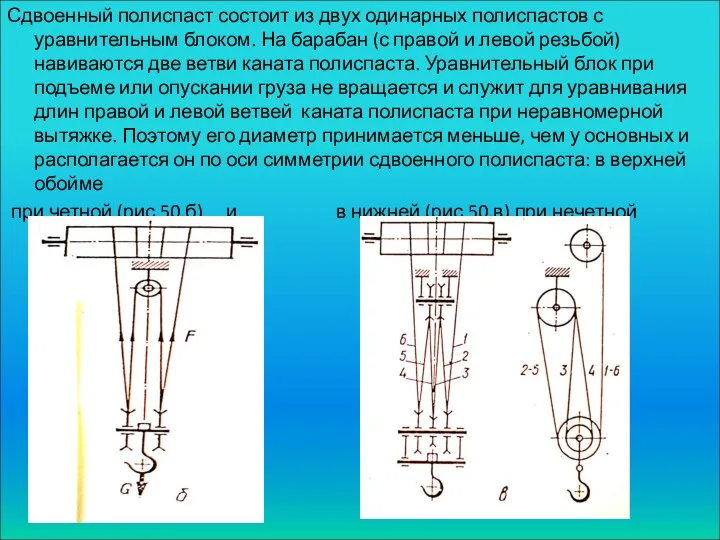
Сдвоенный полиспаст состоит из двух одинарных полиспастов с уравнительным блоком. На
Сдвоенный полиспаст состоит из двух одинарных полиспастов с уравнительным блоком. На
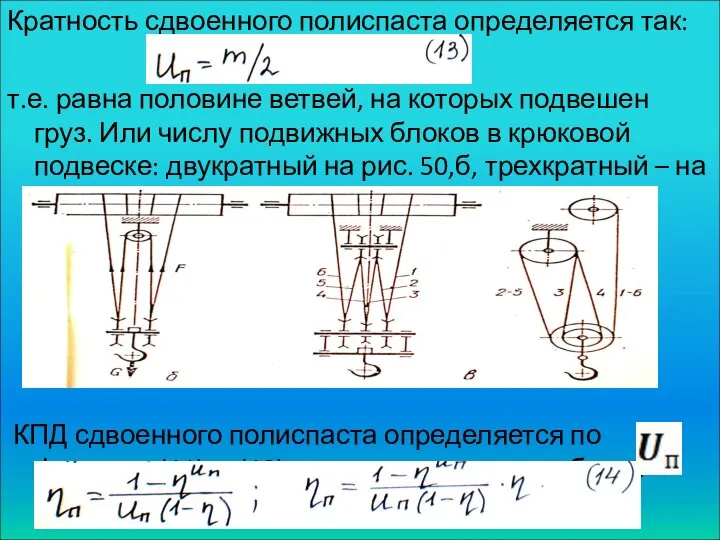
Кратность сдвоенного полиспаста определяется так:
т.е. равна половине ветвей, на которых подвешен
Кратность сдвоенного полиспаста определяется так:
т.е. равна половине ветвей, на которых подвешен
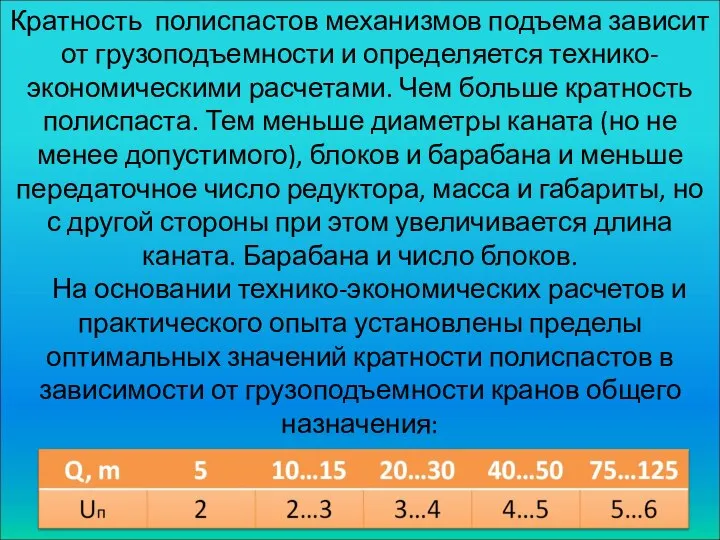
Кратность полиспастов механизмов подъема зависит от грузоподъемности и определяется технико-экономическими расчетами.
Кратность полиспастов механизмов подъема зависит от грузоподъемности и определяется технико-экономическими расчетами.
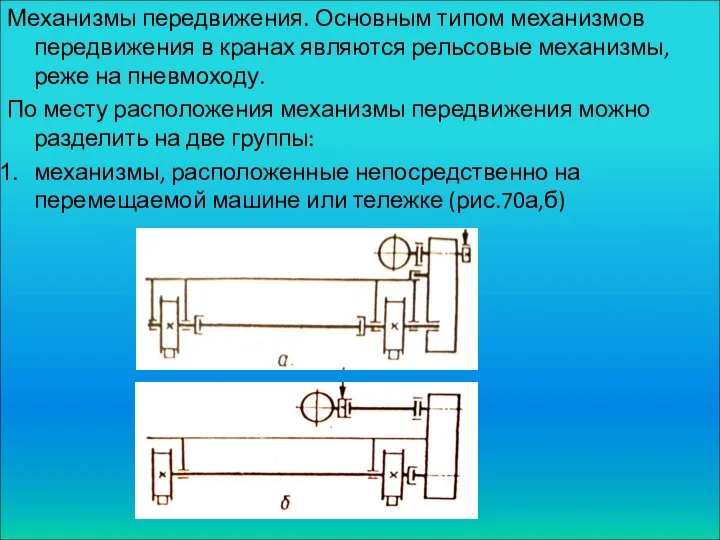
Механизмы передвижения. Основным типом механизмов передвижения в кранах являются рельсовые механизмы,
Механизмы передвижения. Основным типом механизмов передвижения в кранах являются рельсовые механизмы,

2. механизмы, расположенные вне перемещаемого объекта с гибкой (канатной или цепной)
2. механизмы, расположенные вне перемещаемого объекта с гибкой (канатной или цепной)

По конструкции ходовой части крана: колесные, гусеничные, шагающие;
По роду привода: электрический,
По конструкции ходовой части крана: колесные, гусеничные, шагающие; По роду привода: электрический,
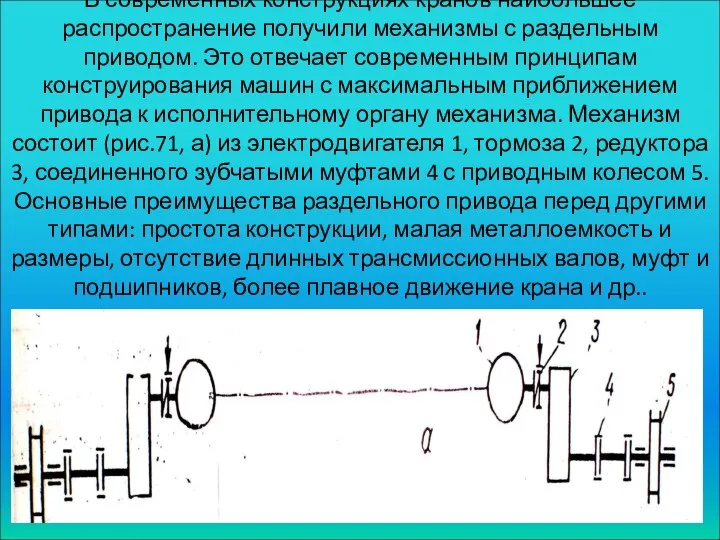
В современных конструкциях кранов наибольшее распространение получили механизмы с раздельным приводом.
В современных конструкциях кранов наибольшее распространение получили механизмы с раздельным приводом.
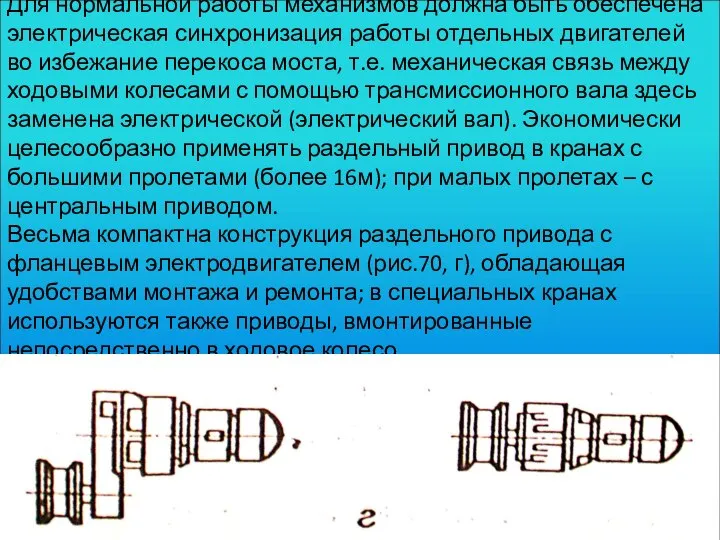
Для нормальной работы механизмов должна быть обеспечена электрическая синхронизация работы отдельных
Для нормальной работы механизмов должна быть обеспечена электрическая синхронизация работы отдельных
Механизмы передвижения с центральным приводом являются простыми, надежными, но вместе с
Механизмы передвижения с центральным приводом являются простыми, надежными, но вместе с
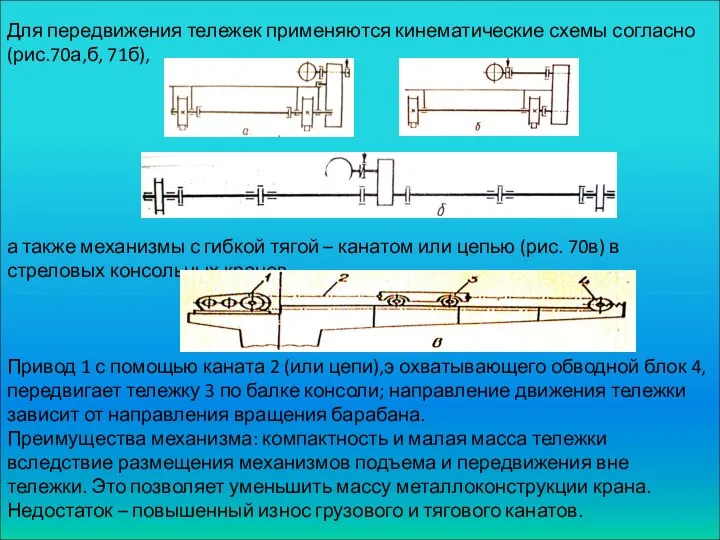
Для передвижения тележек применяются кинематические схемы согласно (рис.70а,б, 71б),
а также
Для передвижения тележек применяются кинематические схемы согласно (рис.70а,б, 71б), а также
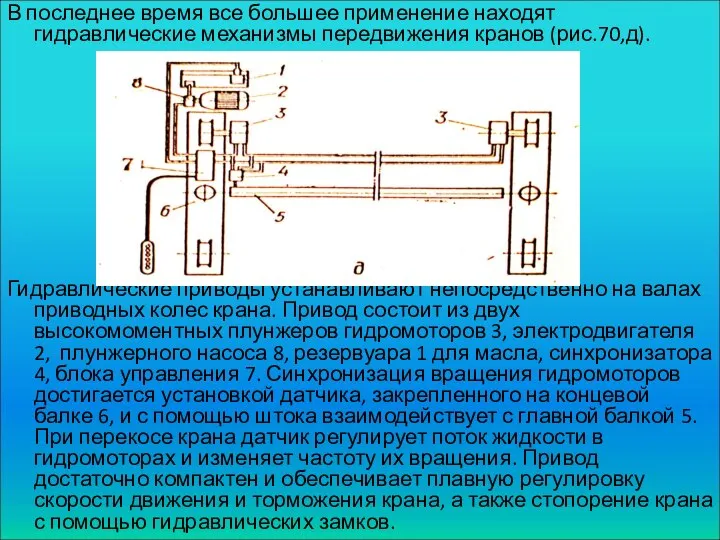
В последнее время все большее применение находят гидравлические механизмы передвижения кранов
В последнее время все большее применение находят гидравлические механизмы передвижения кранов
Сопротивление передвижению рельсовых механизмов.
Сопротивление передвижению при установившемся движении рельсового механизма в
Сопротивление передвижению рельсовых механизмов.
Сопротивление передвижению при установившемся движении рельсового механизма в
Сопротивление перекатыванию зависит от упругих свойств соприкасающихся тел кривизны их поверхностей,
Сопротивление перекатыванию зависит от упругих свойств соприкасающихся тел кривизны их поверхностей,

Расчетная схема механизма передвижения приведена на рис.72,а.
Значение сил:
где - сила трения
Расчетная схема механизма передвижения приведена на рис.72,а.
Значение сил:
где - сила трения
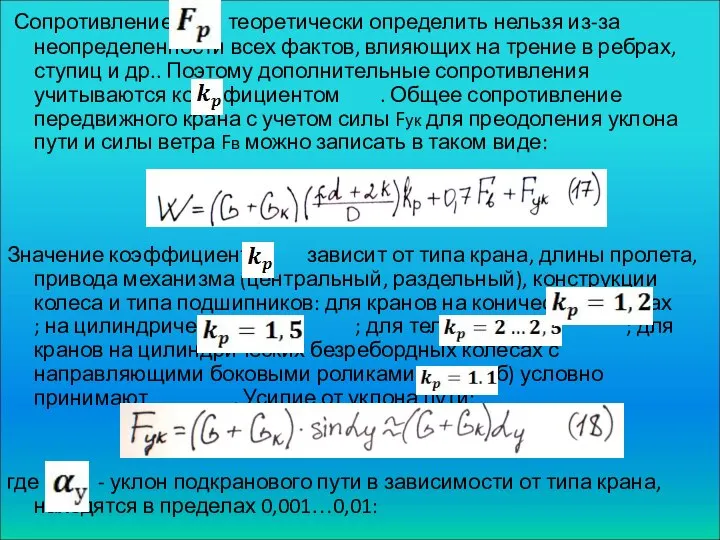
Сопротивление теоретически определить нельзя из-за неопределенности всех фактов, влияющих на
Сопротивление теоретически определить нельзя из-за неопределенности всех фактов, влияющих на
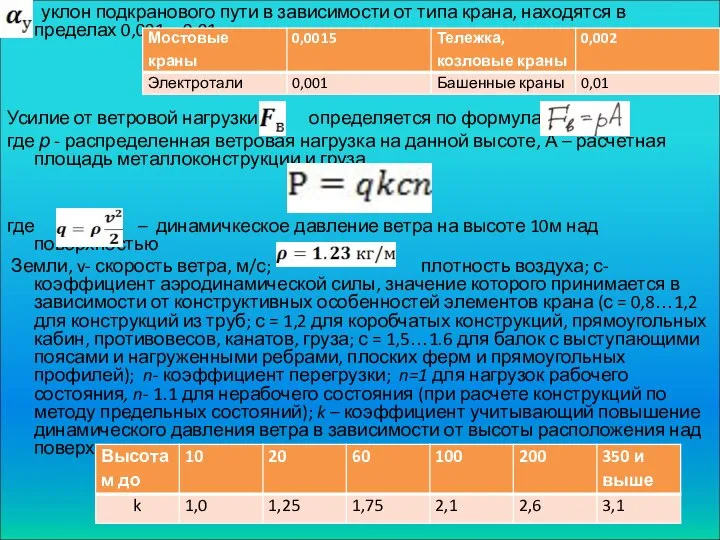
уклон подкранового пути в зависимости от типа крана, находятся в
уклон подкранового пути в зависимости от типа крана, находятся в
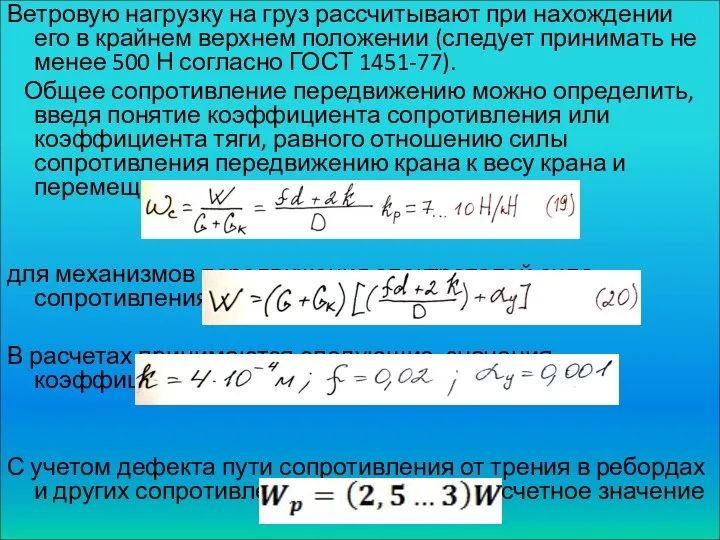
Ветровую нагрузку на груз рассчитывают при нахождении его в крайнем верхнем
Ветровую нагрузку на груз рассчитывают при нахождении его в крайнем верхнем
Мощность привода.
Как показывают расчеты и экспериментальные исследования, в период установившегося движения
Мощность привода.
Как показывают расчеты и экспериментальные исследования, в период установившегося движения
Потребная мощность, кВт, двигателя может быть ориентировочно оценена по формуле:
где -
Потребная мощность, кВт, двигателя может быть ориентировочно оценена по формуле:
где -

В общем случае мощность двигателя механизма передвижения с учетом сил инерции
В общем случае мощность двигателя механизма передвижения с учетом сил инерции
Механизмы изменения вылета. В поворотных стреловых кранах механизмы изменения вылета предназначены
Механизмы изменения вылета. В поворотных стреловых кранах механизмы изменения вылета предназначены

Механизмы изменения вылета качанием стрелы бывают следующих типов (рис.79): полиспастные (а),
Механизмы изменения вылета качанием стрелы бывают следующих типов (рис.79): полиспастные (а),
Наиболее широко применяются полиспастные механизмы вследствие простоты устройства и эксплуатации, небольшой
Наиболее широко применяются полиспастные механизмы вследствие простоты устройства и эксплуатации, небольшой
Полиспастные механизмы изменения вылета аналогичны механизмам подъема и состоят из двигателя,
Полиспастные механизмы изменения вылета аналогичны механизмам подъема и состоят из двигателя,
Расчет механизмов изменения вылета.
Расчетная схема полиспастного механизма представлена на рис.80а. На
Расчет механизмов изменения вылета.
Расчетная схема полиспастного механизма представлена на рис.80а. На
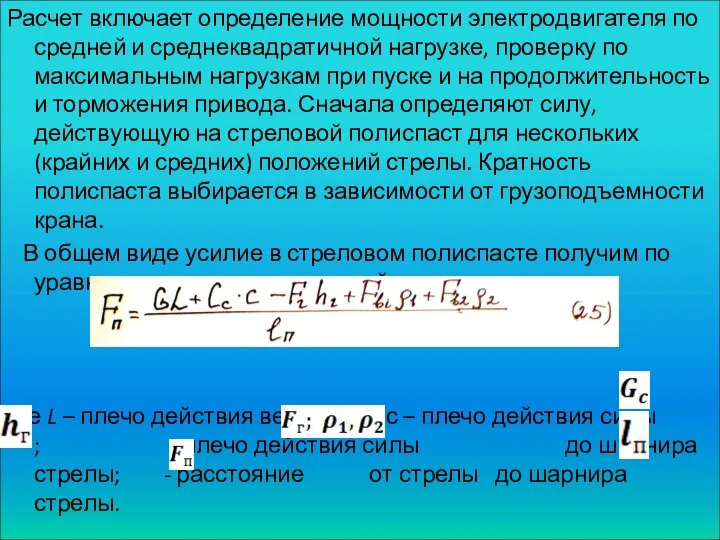
Расчет включает определение мощности электродвигателя по средней и среднеквадратичной нагрузке, проверку
Расчет включает определение мощности электродвигателя по средней и среднеквадратичной нагрузке, проверку
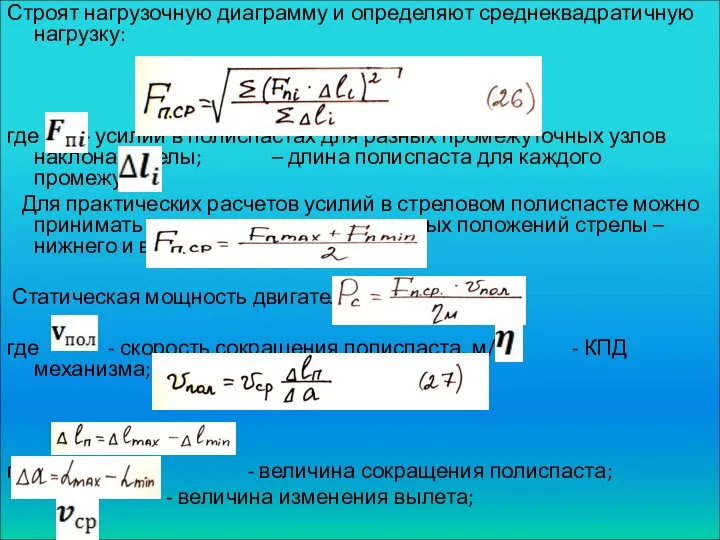
Строят нагрузочную диаграмму и определяют среднеквадратичную нагрузку:
где - усилий в полиспастах
Строят нагрузочную диаграмму и определяют среднеквадратичную нагрузку:
где - усилий в полиспастах
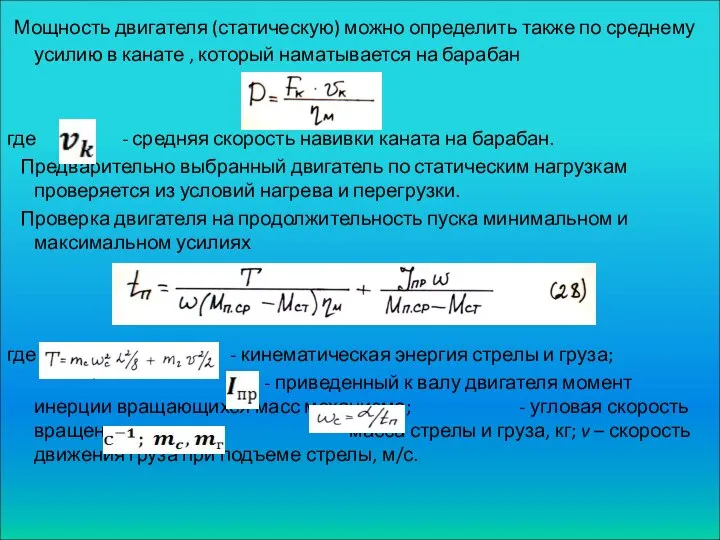
Мощность двигателя (статическую) можно определить также по среднему усилию в
Мощность двигателя (статическую) можно определить также по среднему усилию в
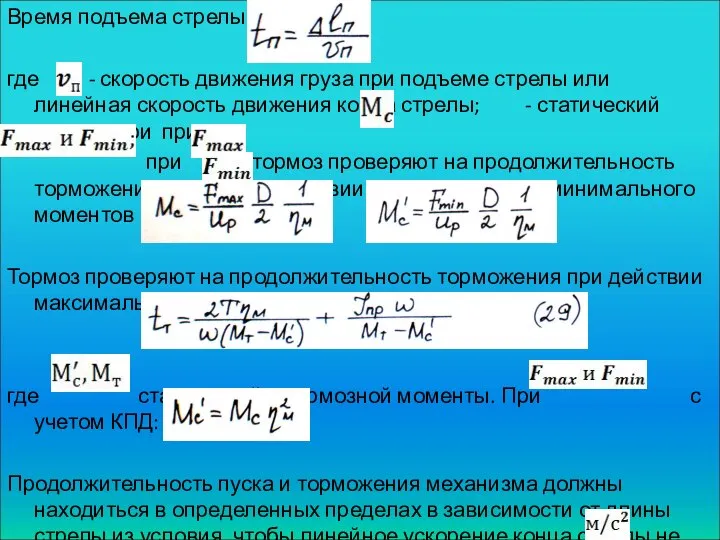
Время подъема стрелы
где - скорость движения груза при подъеме стрелы
Время подъема стрелы
где - скорость движения груза при подъеме стрелы
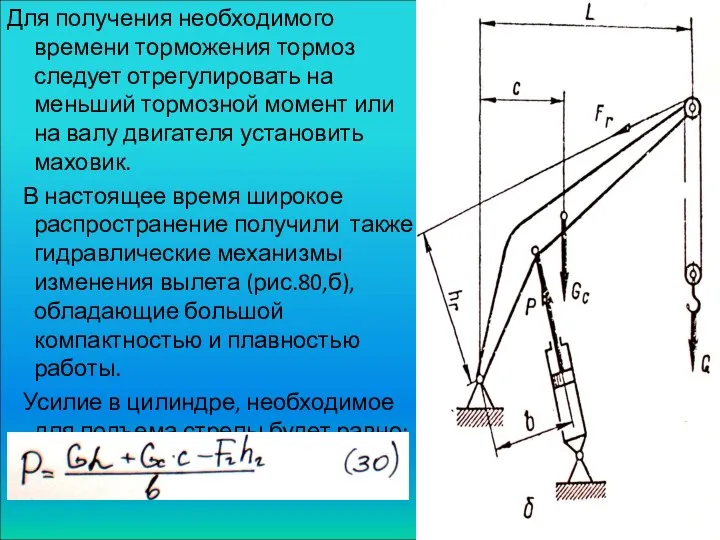
Для получения необходимого времени торможения тормоз следует отрегулировать на меньший тормозной
Для получения необходимого времени торможения тормоз следует отрегулировать на меньший тормозной
Механизмы поворота кранов.
Особенностью механизмов поворота крана являются малые скорости вращения
Механизмы поворота кранов.
Особенностью механизмов поворота крана являются малые скорости вращения

По конструкции (рис.82): - с горизонтальным расположением двигателя и червячным (а)
По конструкции (рис.82): - с горизонтальным расположением двигателя и червячным (а)
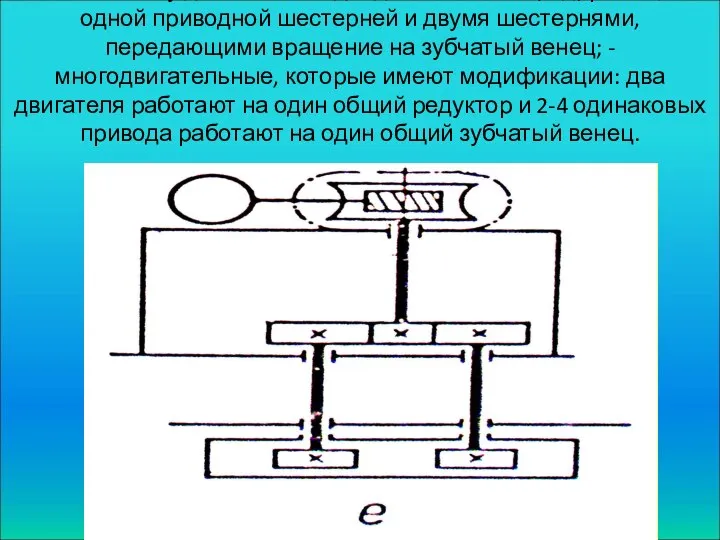
По количеству двигателей: однодвигательные (а-д) рис.82,е :с одной приводной шестерней и
По количеству двигателей: однодвигательные (а-д) рис.82,е :с одной приводной шестерней и
В основном механизмы поворота однодвигательные, но для мощных кранов с большим
В основном механизмы поворота однодвигательные, но для мощных кранов с большим
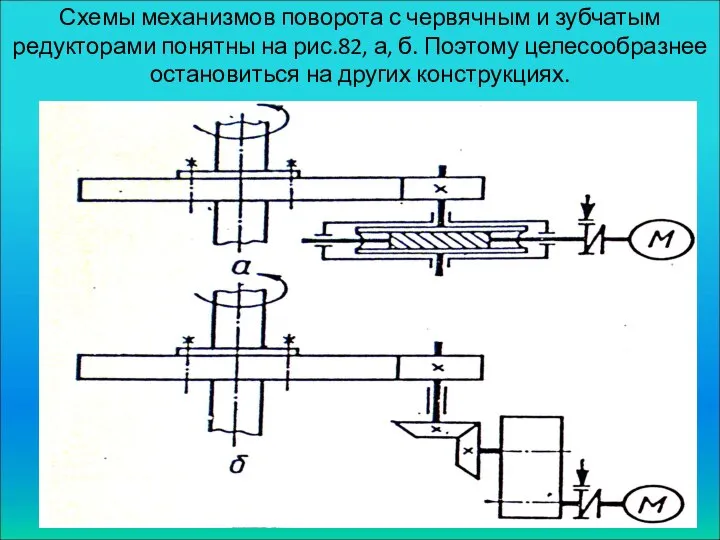
Схемы механизмов поворота с червячным и зубчатым редукторами понятны на рис.82,
Схемы механизмов поворота с червячным и зубчатым редукторами понятны на рис.82,
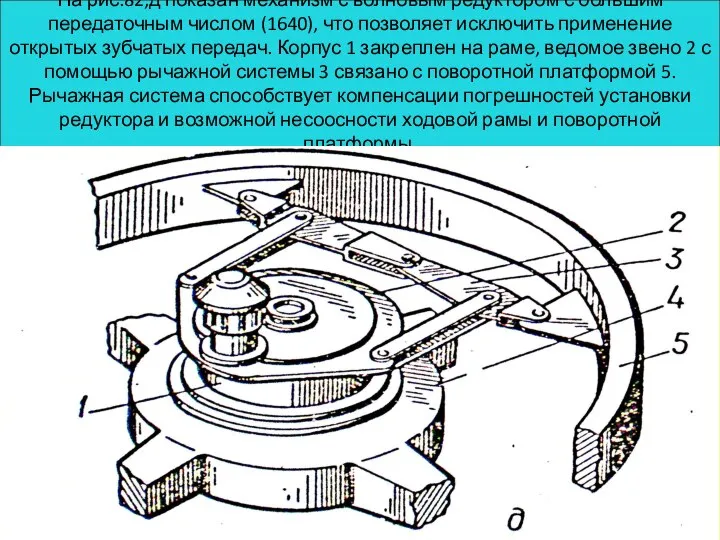
На рис.82,д показан механизм с волновым редуктором с большим передаточным числом
На рис.82,д показан механизм с волновым редуктором с большим передаточным числом
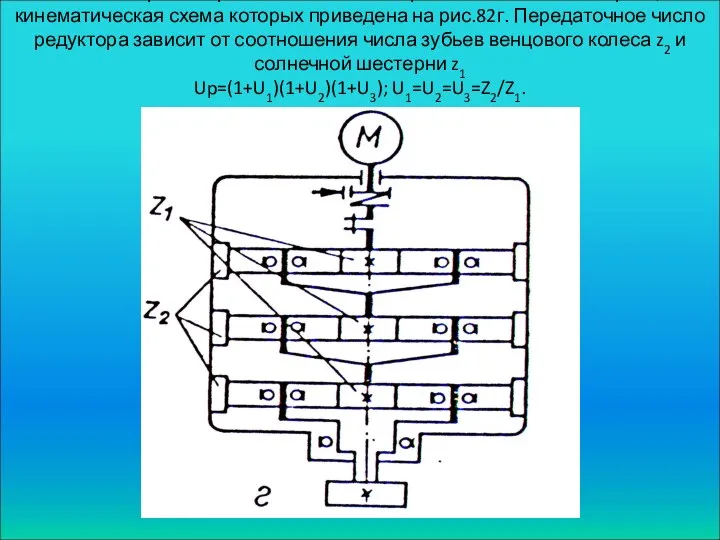
В новых кранах применяются планетарные механизмы поворота, кинематическая схема которых приведена
В новых кранах применяются планетарные механизмы поворота, кинематическая схема которых приведена
Сопротивление в опорах при повороте крана.
Сопротивление повороту крана в установившейся период
Сопротивление в опорах при повороте крана.
Сопротивление повороту крана в установившейся период

Вертикальная реакция, воспринимаемая подпятником,
где - соответственно вес груза, колонны и стрелы.
Вертикальная реакция, воспринимаемая подпятником,
где - соответственно вес груза, колонны и стрелы.
Моменты от ветровых нагрузок
где - угол поворота стрелы.
Среднеквадратичный момент от ветровой
Моменты от ветровых нагрузок
где - угол поворота стрелы.
Среднеквадратичный момент от ветровой
Сопротивление в роликовой опоре и подшипниках крана с неподвижной колонной (рис.84).
Сопротивление в роликовой опоре и подшипниках крана с неподвижной колонной (рис.84).
Вертикальное усилие, воспринимаемое упорным подшипником верхней опоры, равно сумме веса поднимаемого
Вертикальное усилие, воспринимаемое упорным подшипником верхней опоры, равно сумме веса поднимаемого
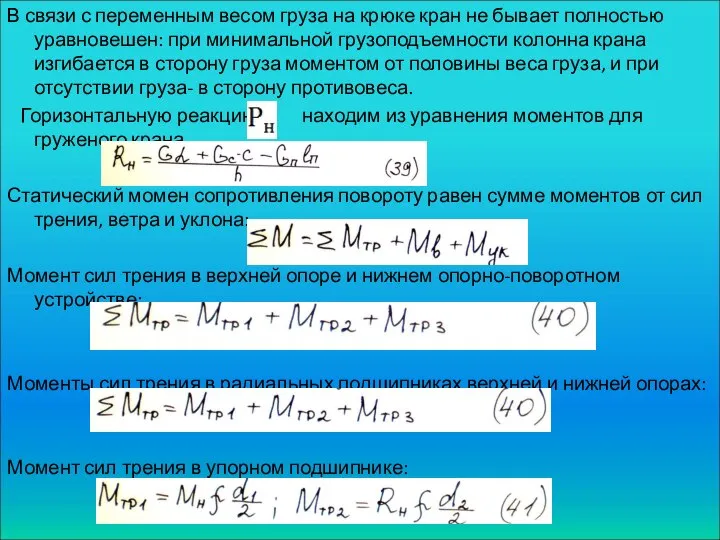
В связи с переменным весом груза на крюке кран не бывает
В связи с переменным весом груза на крюке кран не бывает
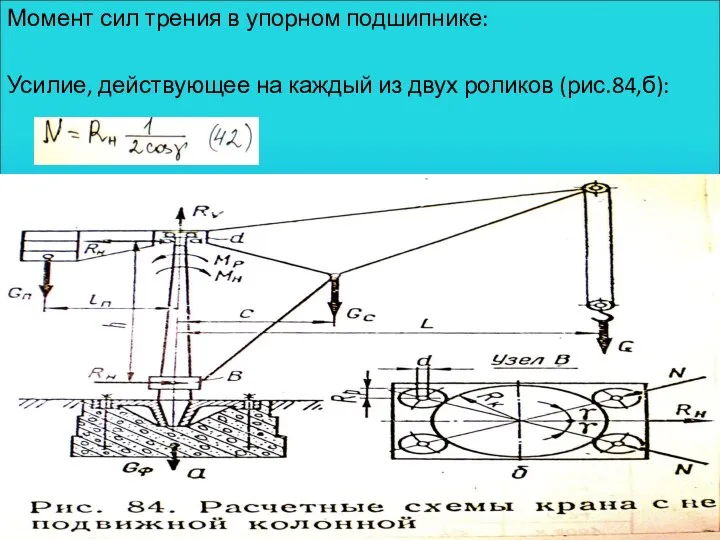
Момент сил трения в упорном подшипнике:
Усилие, действующее на каждый из двух
Момент сил трения в упорном подшипнике:
Усилие, действующее на каждый из двух
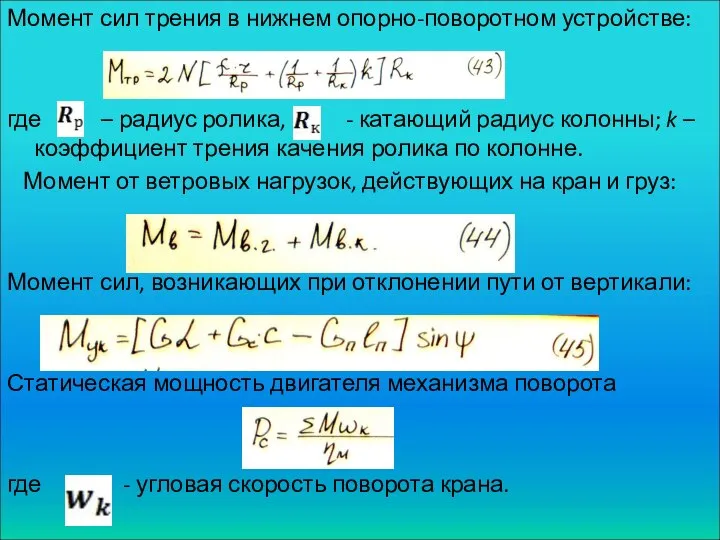
Момент сил трения в нижнем опорно-поворотном устройстве:
где – радиус ролика, -
Момент сил трения в нижнем опорно-поворотном устройстве:
где – радиус ролика, -
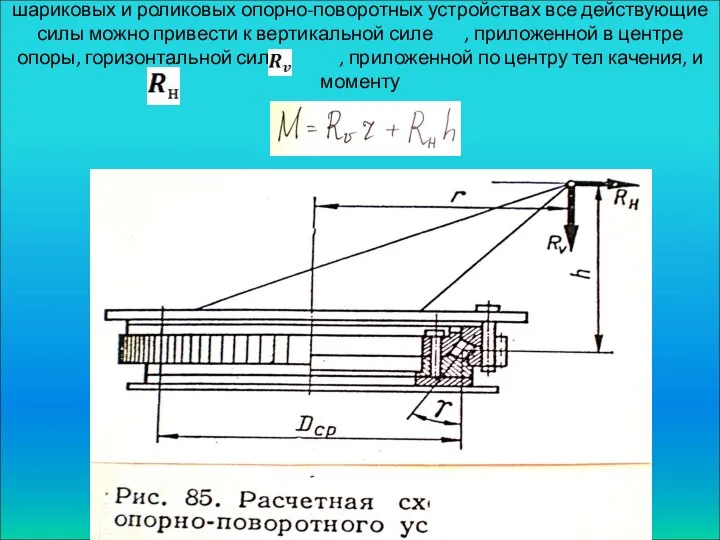
Сопротивление в роликово-шариковых опорных кругах (рис.85). В шариковых и роликовых опорно-поворотных
Сопротивление в роликово-шариковых опорных кругах (рис.85). В шариковых и роликовых опорно-поворотных
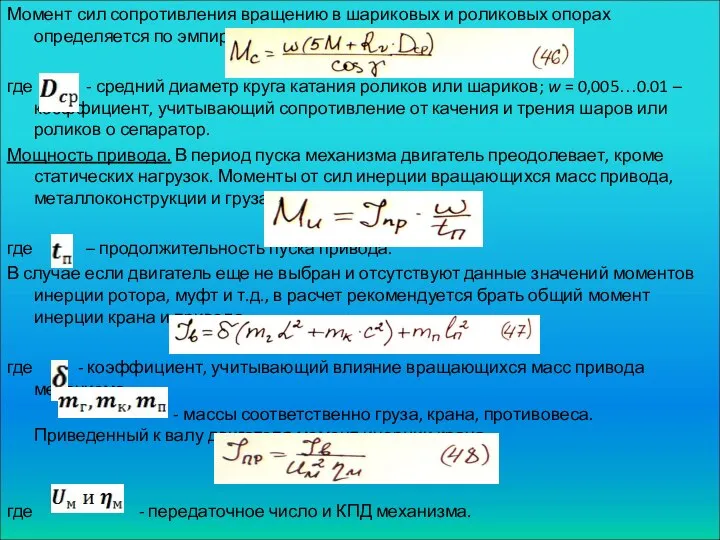
Момент сил сопротивления вращению в шариковых и роликовых опорах определяется по
Момент сил сопротивления вращению в шариковых и роликовых опорах определяется по
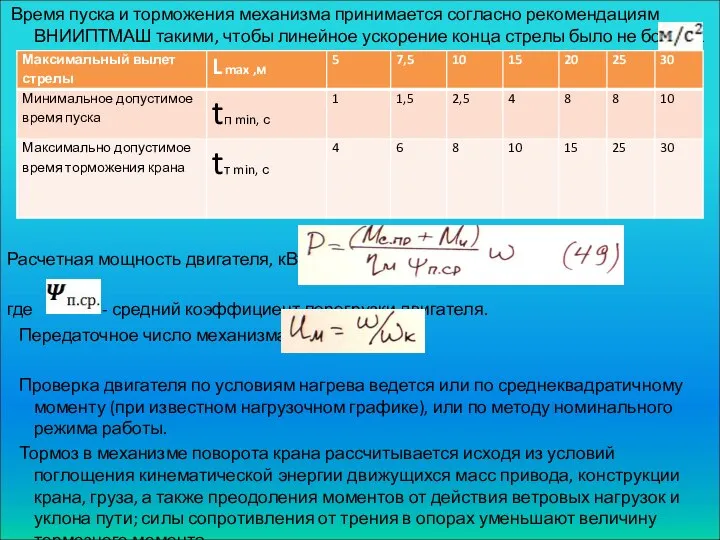
Время пуска и торможения механизма принимается согласно рекомендациям ВНИИПТМАШ такими,
Время пуска и торможения механизма принимается согласно рекомендациям ВНИИПТМАШ такими,
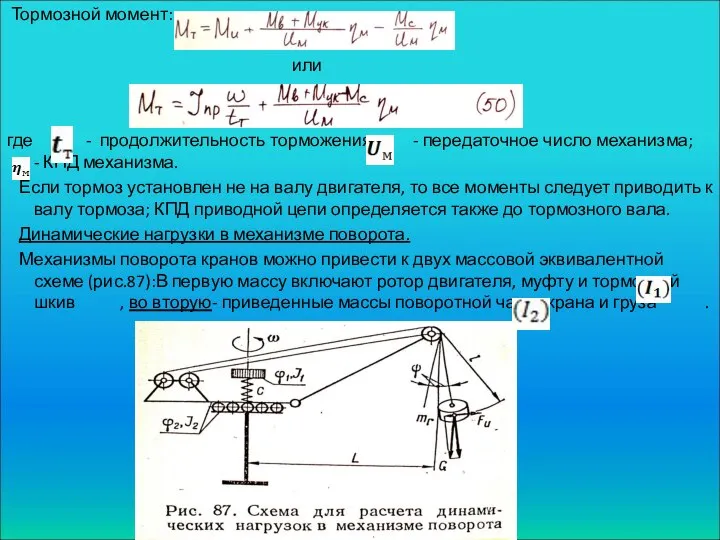
Тормозной момент:
или
где - продолжительность торможения; - передаточное число механизма;
Тормозной момент:
или
где - продолжительность торможения; - передаточное число механизма;
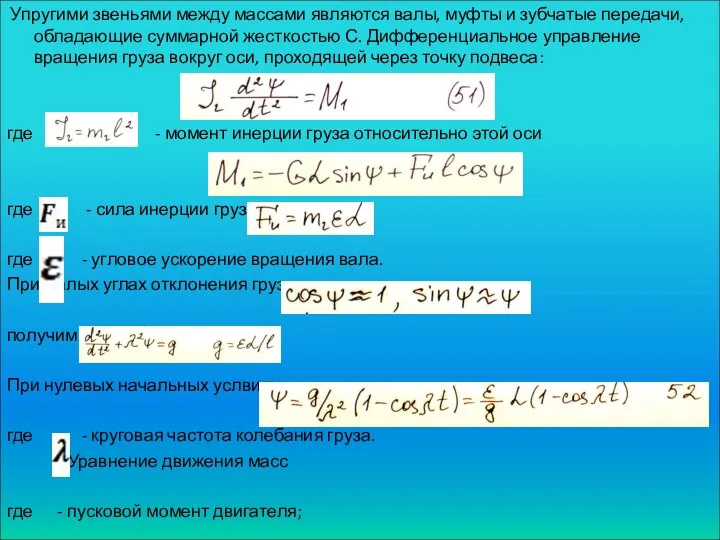
Упругими звеньями между массами являются валы, муфты и зубчатые передачи,
Упругими звеньями между массами являются валы, муфты и зубчатые передачи,
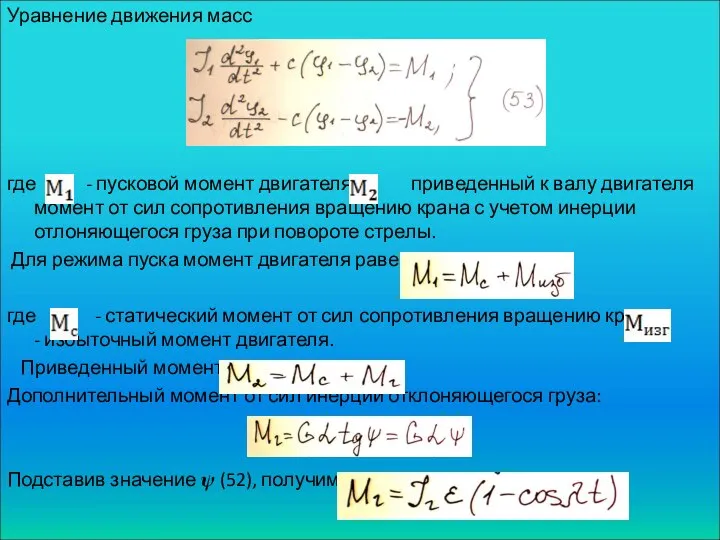
Уравнение движения масс
где - пусковой момент двигателя; приведенный к валу двигателя
Уравнение движения масс
где - пусковой момент двигателя; приведенный к валу двигателя
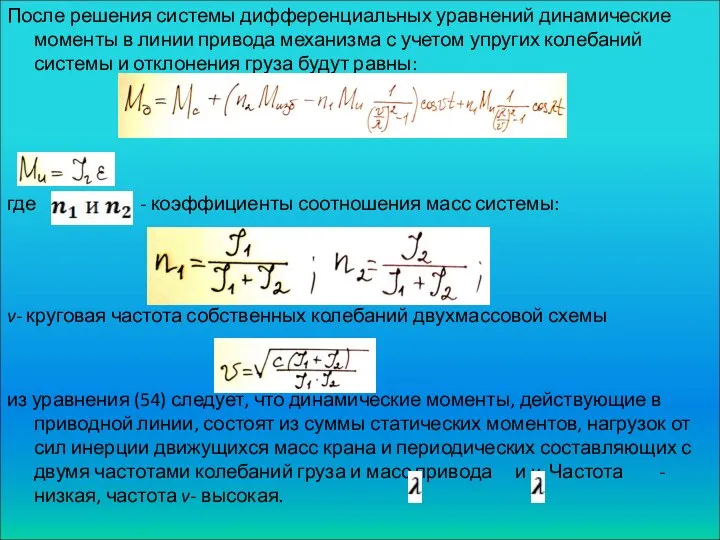
После решения системы дифференциальных уравнений динамические моменты в линии привода механизма
После решения системы дифференциальных уравнений динамические моменты в линии привода механизма
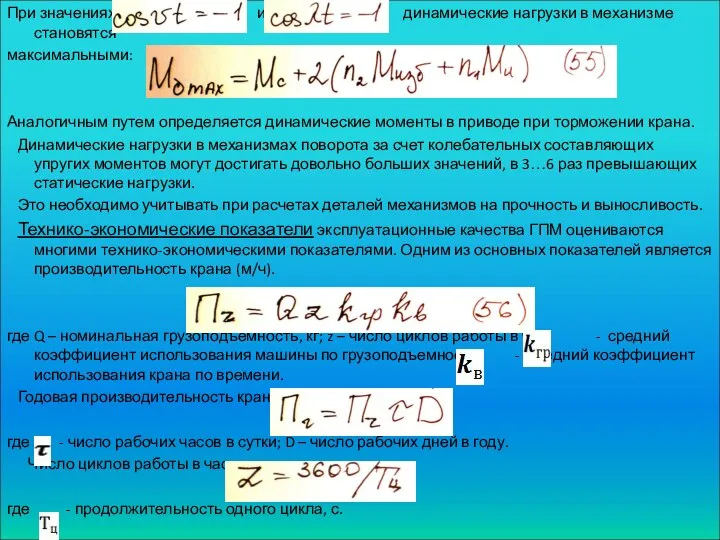
При значениях и динамические нагрузки в механизме становятся
максимальными:
Аналогичным путем определяется
При значениях и динамические нагрузки в механизме становятся
максимальными:
Аналогичным путем определяется
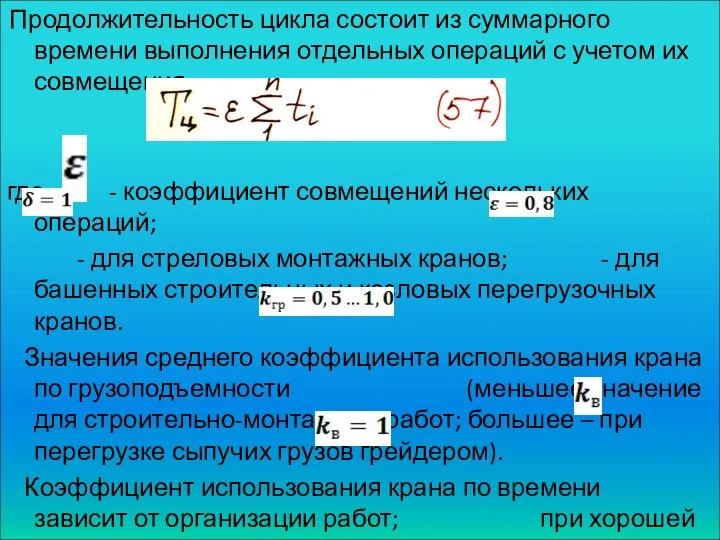
Продолжительность цикла состоит из суммарного времени выполнения отдельных операций с
Продолжительность цикла состоит из суммарного времени выполнения отдельных операций с
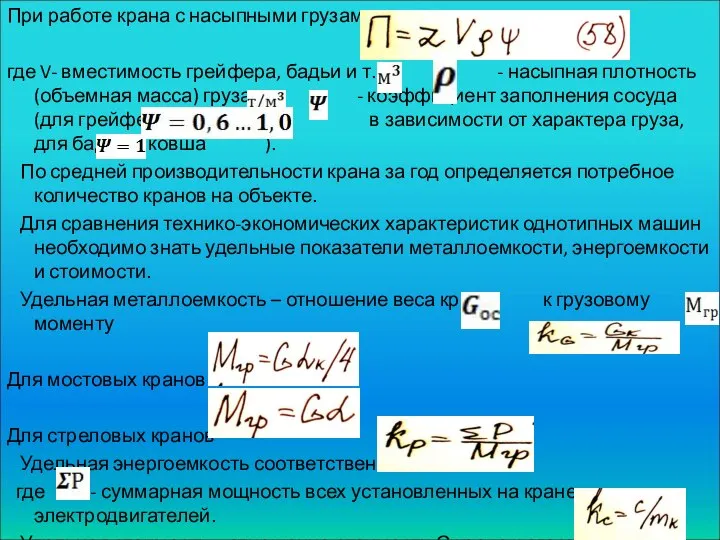
При работе крана с насыпными грузами
где V- вместимость грейфера, бадьи и
При работе крана с насыпными грузами
где V- вместимость грейфера, бадьи и

Задачей конструкторов является снижение удельных показателей за счет унификации, блочности и
Задачей конструкторов является снижение удельных показателей за счет унификации, блочности и
 irregular2
irregular2 Susol RMU_Wiring 20220823
Susol RMU_Wiring 20220823 prezentatsiya1_na_otkrytyy_urok (1)
prezentatsiya1_na_otkrytyy_urok (1) 20220816_прототип лендинга_ лид магнит 10 воронок для бизнеса в онлайн
20220816_прототип лендинга_ лид магнит 10 воронок для бизнеса в онлайн азбука 27.01
азбука 27.01 Протестантский мир
Протестантский мир Дизайн-проект Горемыкинский парк
Дизайн-проект Горемыкинский парк Домики, которые построила природа
Домики, которые построила природа 20170627_proekt_gigiena
20170627_proekt_gigiena Рисование с детьми второй группы раннего возраста Колосок
Рисование с детьми второй группы раннего возраста Колосок Математика. Переместительное свойство умножения
Математика. Переместительное свойство умножения Кейсы
Кейсы Заручьем
Заручьем Парогазовые установки зарубежных производителей
Парогазовые установки зарубежных производителей 20150405_professii
20150405_professii МК Мокапы
МК Мокапы Оценка риска производственных объектов
Оценка риска производственных объектов Достижения системы образования
Достижения системы образования Системы сетевого и системного мониторинга
Системы сетевого и системного мониторинга Новые книги (орловские писатели для детей)
Новые книги (орловские писатели для детей) Разработка программного обеспечения автоматизированной информационной системы - Отдел кадров предприятия
Разработка программного обеспечения автоматизированной информационной системы - Отдел кадров предприятия Использование компетентностно – ориентированных заданий в преподавании биологии
Использование компетентностно – ориентированных заданий в преподавании биологии Субъекты государственной кадровой политики
Субъекты государственной кадровой политики берегите себя
берегите себя Отчет_SamAuto (1)
Отчет_SamAuto (1) Шиповые столярные соединения. Тест
Шиповые столярные соединения. Тест Турбаза в п.Култук Иркутской области
Турбаза в п.Култук Иркутской области Красота мира
Красота мира