- Подготовка модели исследований: система управления с ПИД - регулятором

Содержание
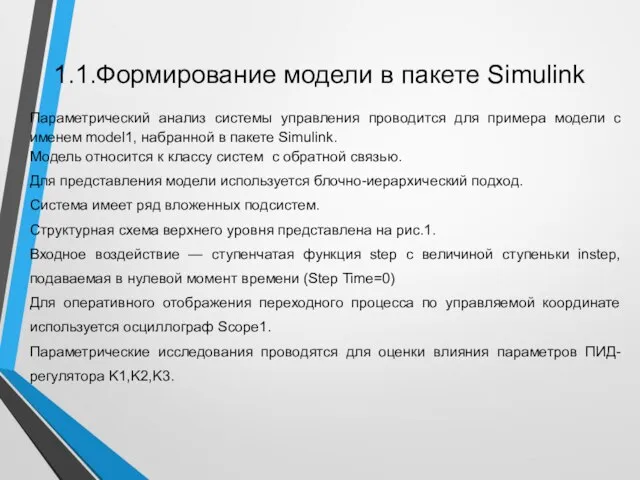
- 2. Параметрический анализ системы управления проводится для примера модели с именем model1, набранной в пакете Simulink. Модель
- 3. рис. 1. Модель исследований (верхний уровень)
- 4. Для последующей графической интерпретации и численных обработок значения критериев загружаются в рабочее пространство workspace пакета MATLAB
- 5. Рис.2. Структурная схема субмодели Subsystem PID+Object – ПИД- регулятор и объект управления
- 6. Корректирующее устройство — ПИД-регулятор использует информацию об ошибке системы (вход In1:input), управляющее воздействие формируется как сумма
- 7. Рис.3. Модель объекта управления
- 8. Начальные значения параметров загружаются в рабочую область через m-файл moddan.m с текстом: Gain_U=1; Gain_I=1; Gain_D=1; K1=8;
- 10. Скачать презентацию
Параметрический анализ системы управления проводится для примера модели с именем model1,
Параметрический анализ системы управления проводится для примера модели с именем model1,
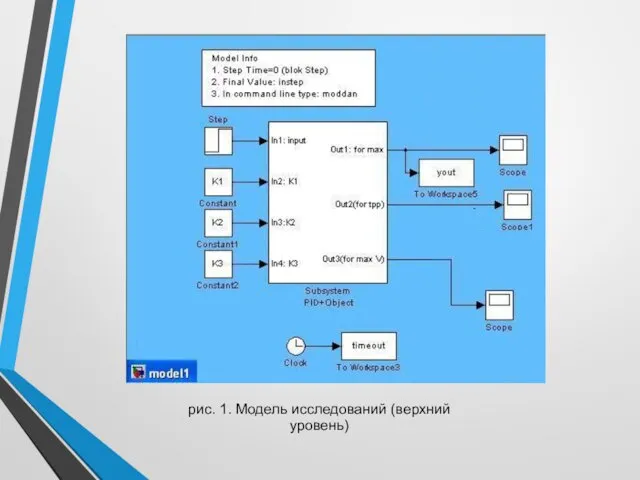
рис. 1. Модель исследований (верхний уровень)
рис. 1. Модель исследований (верхний уровень)
Для последующей графической интерпретации и численных обработок значения критериев загружаются в
Для последующей графической интерпретации и численных обработок значения критериев загружаются в
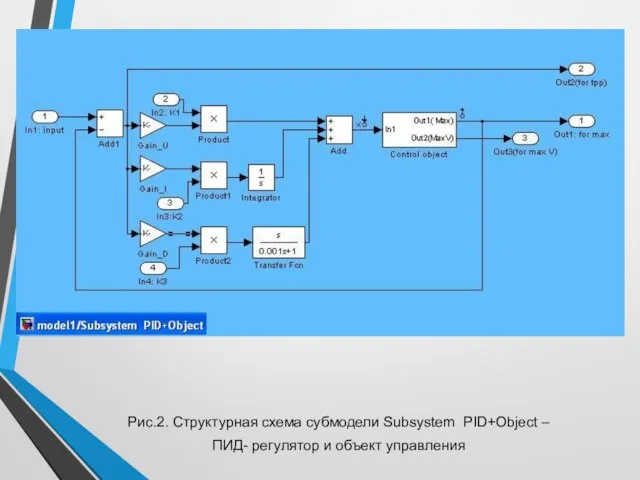
Рис.2. Структурная схема субмодели Subsystem PID+Object –
ПИД- регулятор и объект
Рис.2. Структурная схема субмодели Subsystem PID+Object –
ПИД- регулятор и объект
Корректирующее устройство — ПИД-регулятор использует информацию об ошибке системы (вход In1:input),
Корректирующее устройство — ПИД-регулятор использует информацию об ошибке системы (вход In1:input),
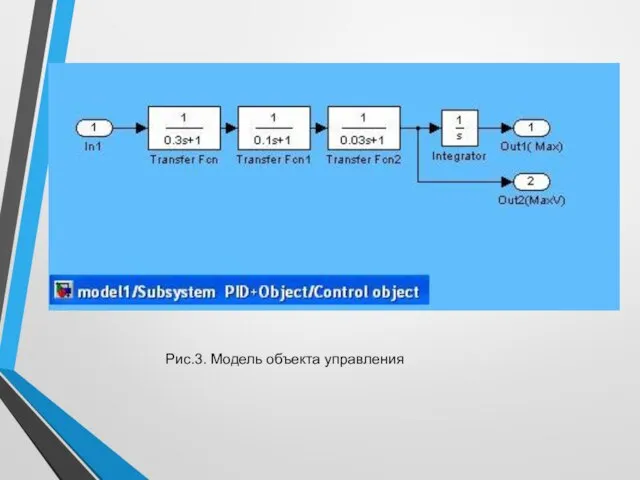
Рис.3. Модель объекта управления
Рис.3. Модель объекта управления
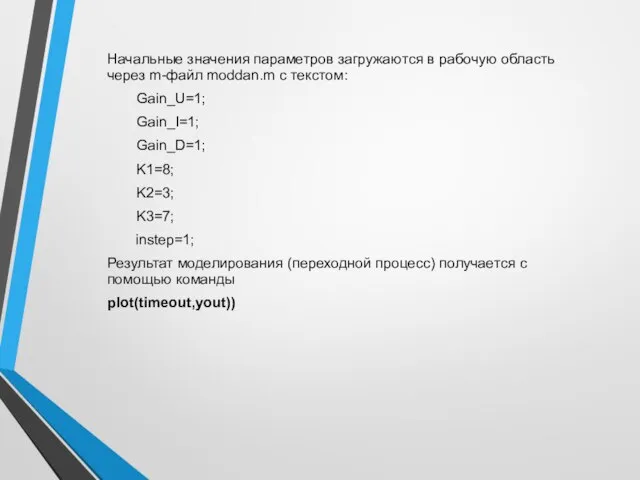
Начальные значения параметров загружаются в рабочую область через m-файл moddan.m с
Начальные значения параметров загружаются в рабочую область через m-файл moddan.m с
 Устойчивое развитие сельского хозяйства в Республике Тыва
Устойчивое развитие сельского хозяйства в Республике Тыва Техническое обслуживание и ремонт троллейбуса
Техническое обслуживание и ремонт троллейбуса Лошадка из полимерной глины
Лошадка из полимерной глины Буровые вышки
Буровые вышки Remotely Controlling Devices
Remotely Controlling Devices ProSys™ системы инсталляции
ProSys™ системы инсталляции 10 вопросов о русской песне младшим школьникам
10 вопросов о русской песне младшим школьникам Смена владельца сим-карты, МТС
Смена владельца сим-карты, МТС Религия и право
Религия и право Инструменты и приспособления для выполнения ручных работ
Инструменты и приспособления для выполнения ручных работ Овощи
Овощи По страницам любимых сказок
По страницам любимых сказок 20171015_urok_sotsialnye_normy_i_otklonyayushcheesya_povedenie_20_fevralya_2012
20171015_urok_sotsialnye_normy_i_otklonyayushcheesya_povedenie_20_fevralya_2012 Коллоквиум 1
Коллоквиум 1 Импритинг
Импритинг Мастер-план. Индустриальный парк Черняховск
Мастер-план. Индустриальный парк Черняховск Prezentatsia5
Prezentatsia5 Зайчику мій я тебе кохаю безмежно
Зайчику мій я тебе кохаю безмежно Разработка-производство изделий
Разработка-производство изделий Фирменный пассажирский поезд Красная стрела
Фирменный пассажирский поезд Красная стрела Фразовые глаголы
Фразовые глаголы Гибка металла
Гибка металла Классификация текстильных волокон. Зрительные иллюзии в одежде
Классификация текстильных волокон. Зрительные иллюзии в одежде Обеспечение мероприятий по переселению граждан из аварийного жилищного фонда
Обеспечение мероприятий по переселению граждан из аварийного жилищного фонда Интеллектуальная игра Морской бой
Интеллектуальная игра Морской бой 20140224_kultura_i_byt_drevney_rusi
20140224_kultura_i_byt_drevney_rusi Графические объекты
Графические объекты Доклад
Доклад