- Работа САУ- 451-03 в режимах Стабилизация, Стабилизация высоты

Содержание
- 2. Тема № 16 «Системы автоматизированного и автоматического управления» Занятие № 7 Работа САУ- 451-03 в режимах
- 3. Вопрос № 1 Работа САУ в режиме «Стабилизация» Режим стабилизация предназначен для выдерживания заданных углов крена
- 4. Канал стабилизатора Контур автоматического управления канала стабилизатора работает одновременно с контуром демпфера. Закон управления для канала
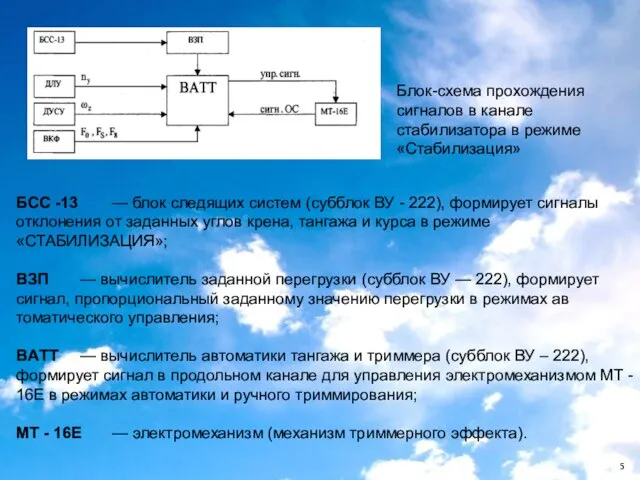
- 5. Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация» БСС -13 — блок следящих систем (субблок
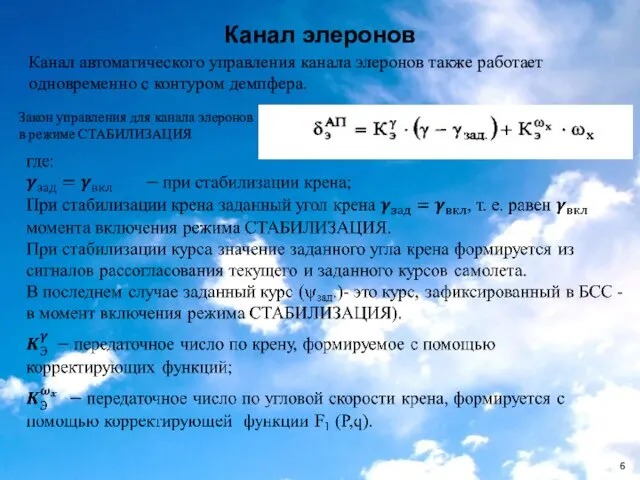
- 6. Канал элеронов Канал автоматического управления канала элеронов также работает одновременно с контуром демпфера. Закон управления для
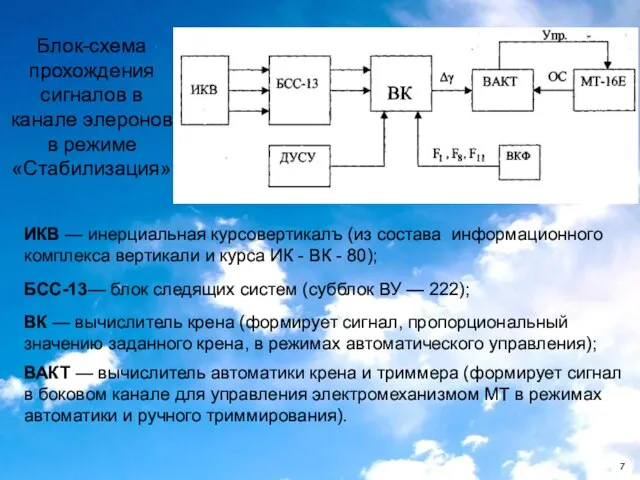
- 7. Блок-схема прохождения сигналов в канале элеронов в режиме «Стабилизация» ИКВ — инерциальная курсовертикалъ (из состава информационного
- 8. Канал руля направления Он работает в автоматических режимах так же, как в режиме ДЕМПФЕР.
- 9. Вопрос № 2. Работа САУ в режиме «Стабилизация высоты» Режим «Стабилизация высоты» предназначен для автоматического выдерживания
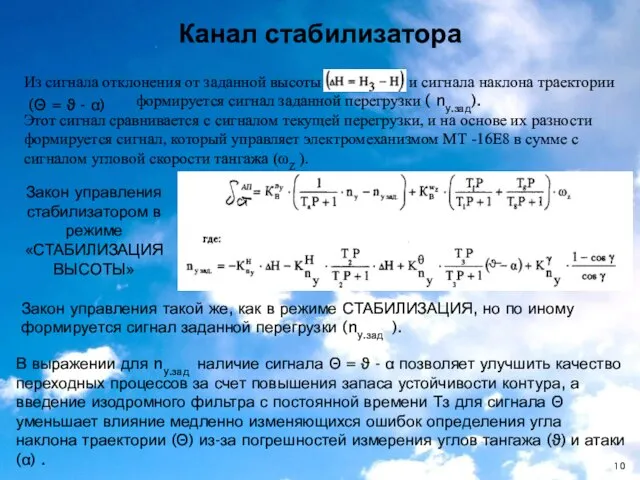
- 10. Канал стабилизатора Из сигнала отклонения от заданной высоты и сигнала наклона траектории формируется сигнал заданной перегрузки
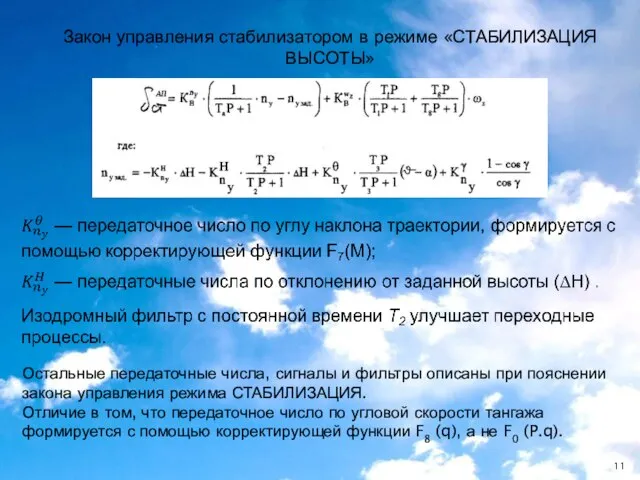
- 11. Закон управления стабилизатором в режиме «СТАБИЛИЗАЦИЯ ВЫСОТЫ» Остальные передаточные числа, сигналы и фильтры описаны при пояснении
- 12. Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация высоты»
- 13. Законы управления в режиме «Стабилизация высоты» не отличается от работы в режиме стабилизации углового положения самолета
- 15. Скачать презентацию
Тема № 16
«Системы автоматизированного и автоматического управления»
Занятие № 7
Работа
Тема № 16
«Системы автоматизированного и автоматического управления»
Занятие № 7
Работа
Вопрос № 1
Работа САУ в режиме «Стабилизация»
Режим стабилизация предназначен для
Вопрос № 1
Работа САУ в режиме «Стабилизация»
Режим стабилизация предназначен для

Канал стабилизатора
Контур автоматического управления канала стабилизатора работает одновременно с контуром демпфера.
Закон
Канал стабилизатора
Контур автоматического управления канала стабилизатора работает одновременно с контуром демпфера.
Закон
Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация»
БСС -13 —
Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация»
БСС -13 —
Канал элеронов
Канал автоматического управления канала элеронов также работает одновременно с контуром
Канал элеронов
Канал автоматического управления канала элеронов также работает одновременно с контуром
Блок-схема прохождения сигналов в канале элеронов в режиме «Стабилизация»
ИКВ — инерциальная
Блок-схема прохождения сигналов в канале элеронов в режиме «Стабилизация»
ИКВ — инерциальная
Канал руля направления
Он работает в автоматических режимах так же, как в
Канал руля направления
Он работает в автоматических режимах так же, как в

Вопрос № 2. Работа САУ в режиме «Стабилизация высоты»
Режим «Стабилизация высоты»
Вопрос № 2. Работа САУ в режиме «Стабилизация высоты»
Режим «Стабилизация высоты»
Канал стабилизатора
Из сигнала отклонения от заданной высоты и сигнала наклона траектории
Канал стабилизатора
Из сигнала отклонения от заданной высоты и сигнала наклона траектории
Закон управления стабилизатором в режиме «СТАБИЛИЗАЦИЯ ВЫСОТЫ»
Остальные передаточные числа, сигналы
Закон управления стабилизатором в режиме «СТАБИЛИЗАЦИЯ ВЫСОТЫ»
Остальные передаточные числа, сигналы

Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация высоты»
Блок-схема прохождения сигналов в канале стабилизатора в режиме «Стабилизация высоты»
Законы управления в режиме «Стабилизация высоты» не отличается от работы в
Законы управления в режиме «Стабилизация высоты» не отличается от работы в
 Требования к участию в научной работе, к выбору тематики и подготовке выпускных квалификационных работ
Требования к участию в научной работе, к выбору тематики и подготовке выпускных квалификационных работ Бібліотечні уроки
Бібліотечні уроки Промышленное применение газовых тепловых насосов Tedom polo 100
Промышленное применение газовых тепловых насосов Tedom polo 100 Problem statement. Exploration of the 5/01 Vario vacuum casting machine and promotional demo for one application
Problem statement. Exploration of the 5/01 Vario vacuum casting machine and promotional demo for one application orc.jd-3701
orc.jd-3701 20160630_avtomatizatsiya_zv_r_v_mnogoslozhnyh_slovah
20160630_avtomatizatsiya_zv_r_v_mnogoslozhnyh_slovah Электронные образовательные ресурсы для ДОУ
Электронные образовательные ресурсы для ДОУ Технология в жизни человека и общества
Технология в жизни человека и общества digital markstrat edra raw
digital markstrat edra raw Устройство и оборудование водопроводных сетей зданий
Устройство и оборудование водопроводных сетей зданий Делятинський психоневрологічний інтернат
Делятинський психоневрологічний інтернат Основные методы оценки рисков
Основные методы оценки рисков Методи наукових досліджень в лексикології
Методи наукових досліджень в лексикології Антенатальды профилактика
Антенатальды профилактика zvuki_s_i_sh
zvuki_s_i_sh Инструктаж ЭМХ-301-20
Инструктаж ЭМХ-301-20 urok_2_itog
urok_2_itog Холдинг Кабельный Альянс
Холдинг Кабельный Альянс Astrid Anna Emilia Lindgren
Astrid Anna Emilia Lindgren 20120825_grad_petra_i_fevronii
20120825_grad_petra_i_fevronii Образы киномузыки
Образы киномузыки ПРЕЗЕНТАЦИЯ_ЛАГО_НАКИ_Для_Бабича
ПРЕЗЕНТАЦИЯ_ЛАГО_НАКИ_Для_Бабича Источники оперативного тока
Источники оперативного тока Наше село Тюй
Наше село Тюй Креатив резюме. Я - кукла
Креатив резюме. Я - кукла Реле
Реле Mass media in the USA: trends and personalities
Mass media in the USA: trends and personalities Halloween
Halloween