- Системные вопросы проектирования автомобильных радаров

Содержание
- 2. Преимущества радиолокационных датчиков систем помощи водителю Optical systems (video cameras, lidars): loss of the efficiency in
- 3. Основные функции ADAS, реализуемые на основе авторадаров Адаптивный круиз-контроль (ACC) Автоматическое экстренное торможение (AEB)
- 4. 24 77 2019 2022 24 (?) 77 300, 650 Элементы разрешения δα Развитие технологий – повышение
- 5. Развитие элементной базы: от одноканальных ППМ к многоканальным системам на кристалле Приемо-передающий Модуль Infineon диапазона 24
- 6. Основные виды автомобильных радаров Радар переднего обзора дальнего действия диапазона 76-77 или 24-24,25 ГГц с дальностью
- 7. Типовые значения параметров современных авторадаров средней и большой дальности ведущих производителей Дальность действия: - до 150-250
- 8. Основные функциональные узлы авторадара
- 9. Зондирующий сигнал с медленной перестройкой частоты Структурная схема одного канала Базовый принцип обработки сигналов при использовании
- 10. Проблема идентификации отметок в многоцелевой ситуации Отметки в первой и второй зонах, полученные в реальной дорожной
- 11. Зондирующий сигнал с быстрой перестройкой частоты и алгоритм его обработки Fд = 20 МГц Tп ≈
- 12. Иллюстрация к вычислению двумерного БПФ
- 13. Технологии изготовления антенн Радар дальнего действия Bosch (77 ГГц) с фокусирующей диэлектрической линзой Антенна с ДОС
- 14. Технологии изготовления антенн. Антенна с частотным сканированием
- 15. Технологии изготовления антенн: ФАР ФАР с цифровым диаграммообразованием Радар дальнего действия (Denso) Радар ближнего действия
- 16. Антенны для авторадаров: MIMO решетка (Continental) Подрешетки радара ближней зоны Подрешетки радара дальней зоны Continental ARS
- 17. Вопросы вторичной обработки Проблемы сопровождения наземных объектов: сложная фоновая обстановка – множество местных объектов; распределенный характер
- 18. Ключевые вызовы при разработке авторадаров Доступ к технологии производства приемо-передающих модулей, а в перспективе – систем
- 19. Автомобильный радар разрабатывается совместно с ПКК «Миландр» (Зеленоград). Предназначен для использования в системах ADAS для реализации
- 20. Система цифровой обработки сигналов на отечественной элементной базе (цифровой сигнальный процессор от «Миландр»)
- 21. Автомобильный радар:: Характеристики
- 22. Испытания на тестовых автомобилях
- 23. Оценка углового разрешения и точности измерения угла по уголковым отражателям
- 24. Натурные эксперименты по сопровождению целей Отметка вторичной обработки Первичное измерение в ближней зоне Первичное измерение в
- 25. Испытания в дорожных условиях: объединение данных радара с видео
- 26. Перспективные направления развития автомобильных радаров: радиолокационная система кругового обзора Радар переднего обзора диапазона 76-77 или 24-24,25
- 28. Скачать презентацию

Преимущества радиолокационных датчиков систем помощи водителю
Optical systems (video cameras, lidars):
loss
Преимущества радиолокационных датчиков систем помощи водителю
Optical systems (video cameras, lidars):
loss
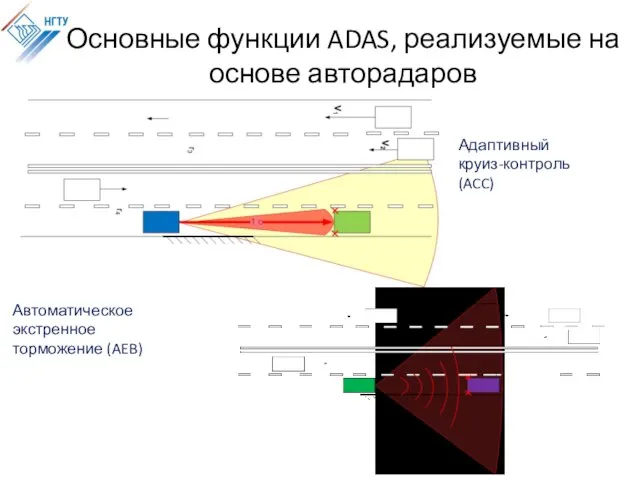
Основные функции ADAS, реализуемые на основе авторадаров
Адаптивный
круиз-контроль (ACC)
Автоматическое экстренное
торможение
Основные функции ADAS, реализуемые на основе авторадаров
Адаптивный
круиз-контроль (ACC)
Автоматическое экстренное торможение

24
77
2019
2022
24 (?)
77
300, 650
Элементы разрешения
δα
Развитие технологий – повышение несущей и разрешения
150 (?)
2030
24
77
2019
2022
24 (?)
77
300, 650
Элементы разрешения
δα
Развитие технологий – повышение несущей и разрешения
150 (?)
2030
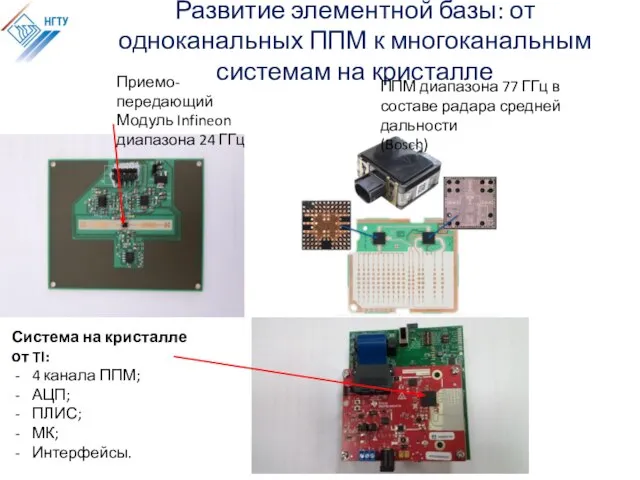
Развитие элементной базы: от одноканальных ППМ к многоканальным системам на кристалле
Приемо-передающий
Развитие элементной базы: от одноканальных ППМ к многоканальным системам на кристалле
Приемо-передающий
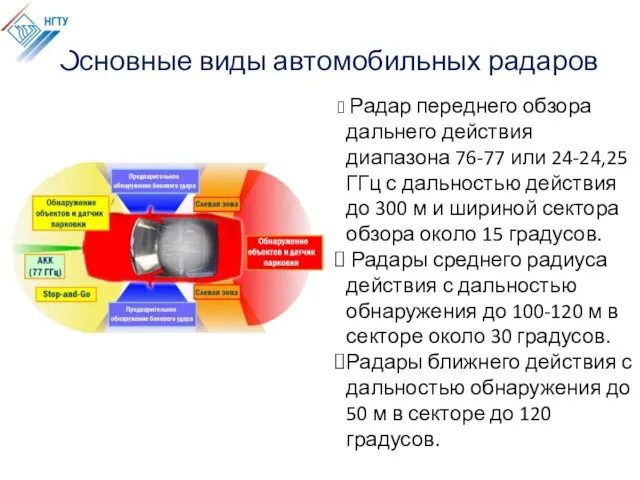
Основные виды автомобильных радаров
Радар переднего обзора дальнего действия диапазона 76-77
Основные виды автомобильных радаров
Радар переднего обзора дальнего действия диапазона 76-77
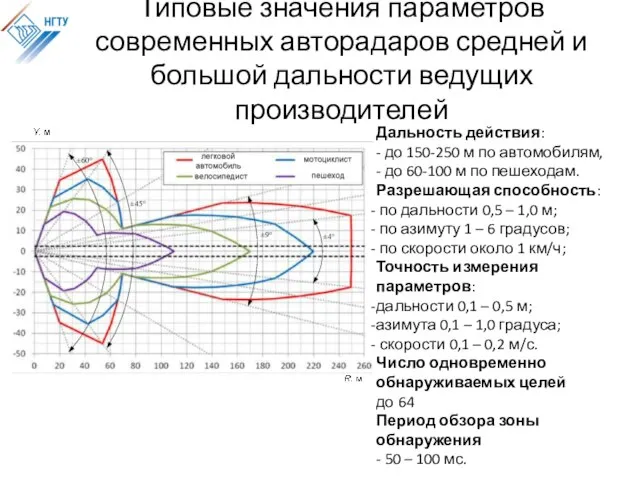
Типовые значения параметров современных авторадаров средней и большой дальности ведущих производителей
Дальность
Типовые значения параметров современных авторадаров средней и большой дальности ведущих производителей
Дальность
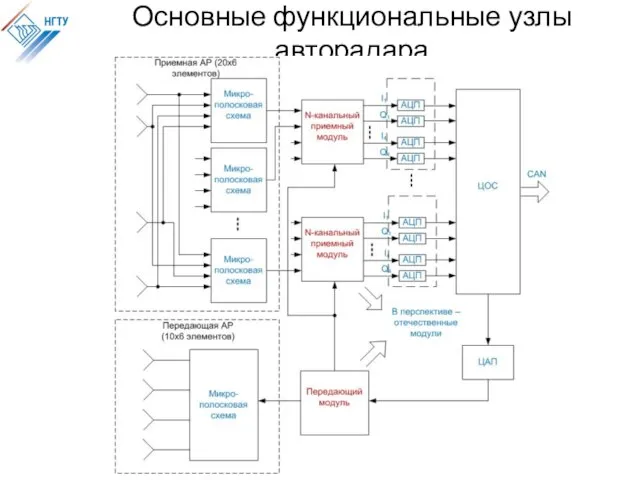
Основные функциональные узлы авторадара
Основные функциональные узлы авторадара
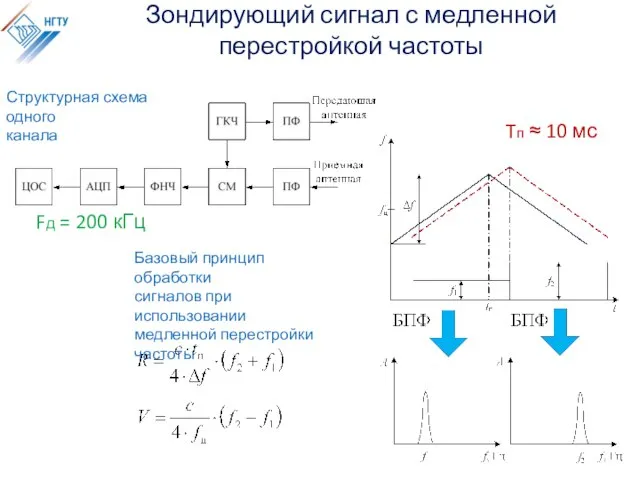
Зондирующий сигнал с медленной перестройкой частоты
Структурная схема одного
канала
Базовый принцип обработки
сигналов при
Зондирующий сигнал с медленной перестройкой частоты
Структурная схема одного
канала
Базовый принцип обработки сигналов при
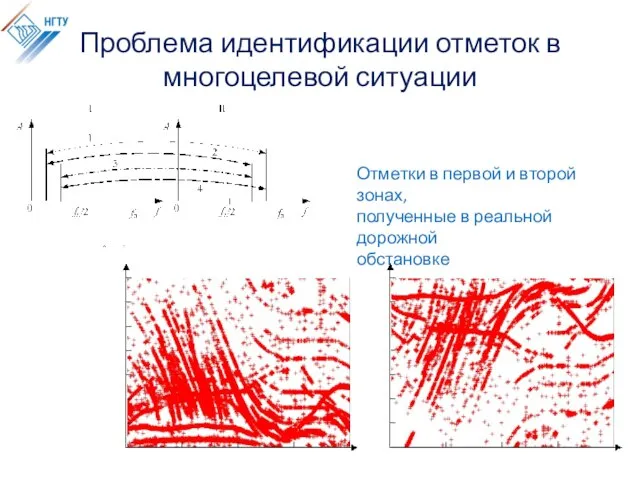
Проблема идентификации отметок в многоцелевой ситуации
Отметки в первой и второй зонах,
полученные
Проблема идентификации отметок в многоцелевой ситуации
Отметки в первой и второй зонах, полученные
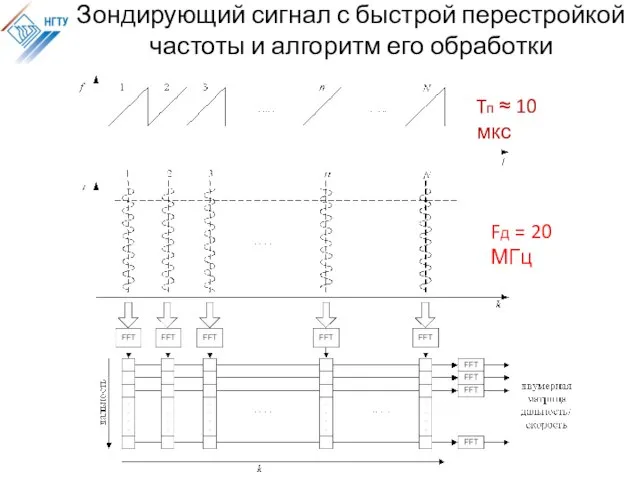
Зондирующий сигнал с быстрой перестройкой частоты и алгоритм его обработки
Fд =
Зондирующий сигнал с быстрой перестройкой частоты и алгоритм его обработки
Fд =
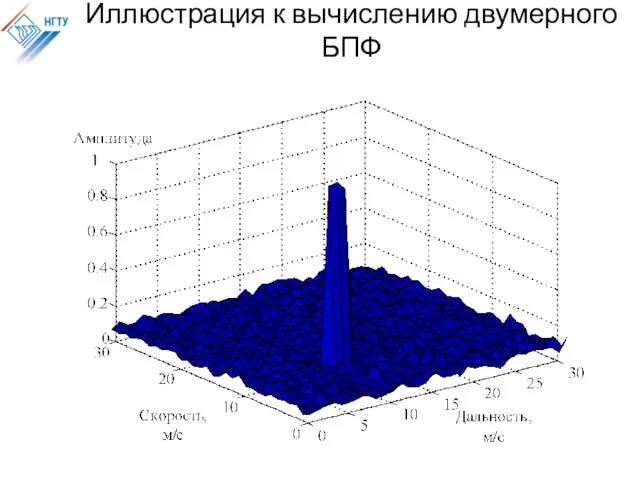
Иллюстрация к вычислению двумерного БПФ
Иллюстрация к вычислению двумерного БПФ

Технологии изготовления антенн
Радар дальнего действия
Bosch (77 ГГц) с фокусирующей
диэлектрической
Технологии изготовления антенн
Радар дальнего действия Bosch (77 ГГц) с фокусирующей диэлектрической
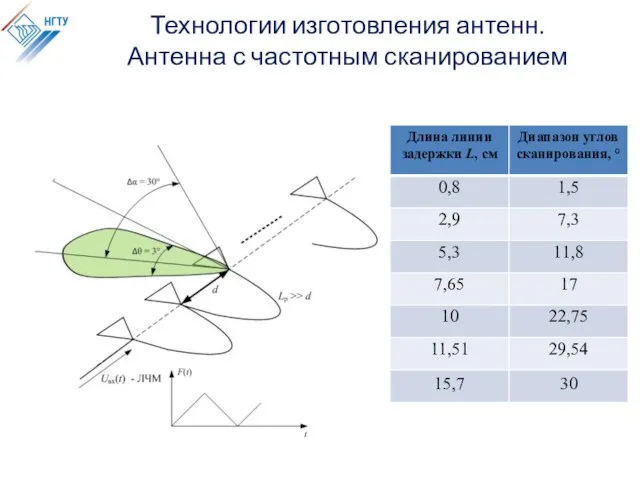
Технологии изготовления антенн.
Антенна с частотным сканированием
Технологии изготовления антенн.
Антенна с частотным сканированием

Технологии изготовления антенн: ФАР
ФАР с цифровым
диаграммообразованием
Радар дальнего действия (Denso)
Радар ближнего
Технологии изготовления антенн: ФАР
ФАР с цифровым
диаграммообразованием
Радар дальнего действия (Denso)
Радар ближнего
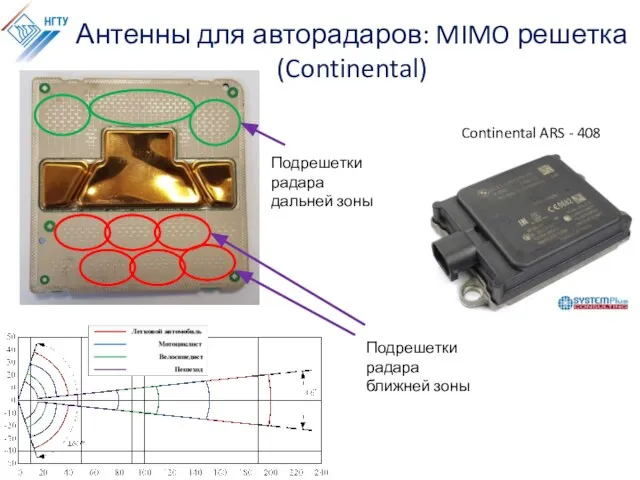
Антенны для авторадаров: MIMO решетка (Continental)
Подрешетки радара
ближней зоны
Подрешетки радара
дальней зоны
Continental ARS
Антенны для авторадаров: MIMO решетка (Continental)
Подрешетки радара
ближней зоны
Подрешетки радара
дальней зоны
Continental ARS
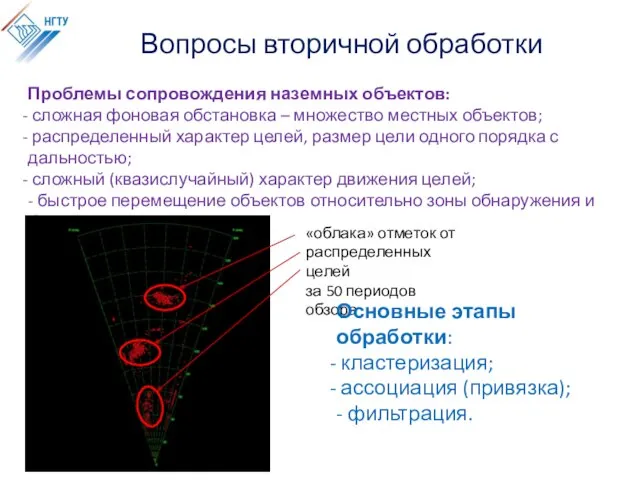
Вопросы вторичной обработки
Проблемы сопровождения наземных объектов:
сложная фоновая обстановка – множество
Вопросы вторичной обработки
Проблемы сопровождения наземных объектов:
сложная фоновая обстановка – множество
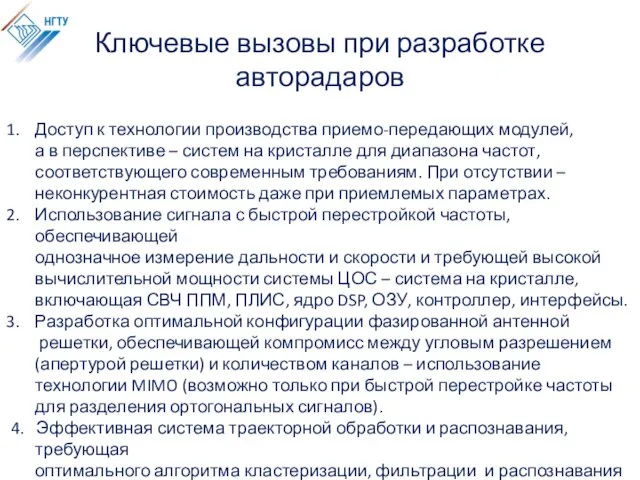
Ключевые вызовы при разработке авторадаров
Доступ к технологии производства приемо-передающих модулей,
а
Ключевые вызовы при разработке авторадаров
Доступ к технологии производства приемо-передающих модулей, а

Автомобильный радар разрабатывается совместно с ПКК «Миландр» (Зеленоград). Предназначен для использования
Автомобильный радар разрабатывается совместно с ПКК «Миландр» (Зеленоград). Предназначен для использования
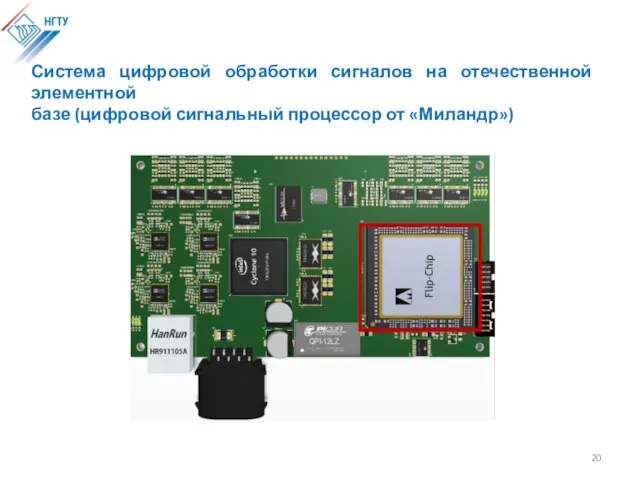
Система цифровой обработки сигналов на отечественной элементной
базе (цифровой сигнальный процессор
Система цифровой обработки сигналов на отечественной элементной
базе (цифровой сигнальный процессор
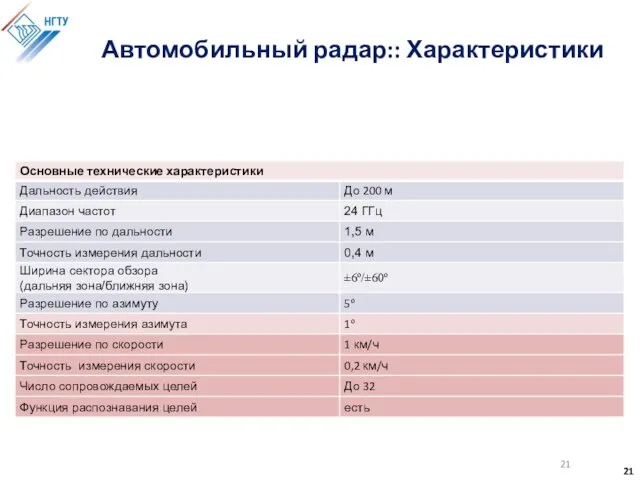
Автомобильный радар:: Характеристики
Автомобильный радар:: Характеристики

Испытания на тестовых автомобилях
Испытания на тестовых автомобилях

Оценка углового разрешения и точности измерения угла по уголковым отражателям
Оценка углового разрешения и точности измерения угла по уголковым отражателям
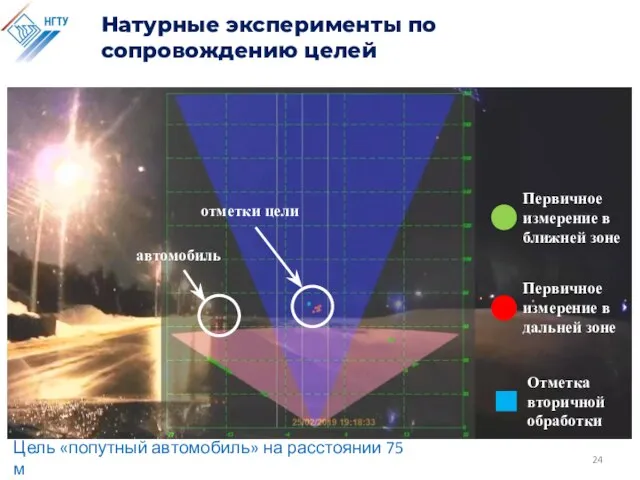
Натурные эксперименты по сопровождению целей
Отметка вторичной обработки
Первичное измерение в ближней зоне
Первичное
Натурные эксперименты по сопровождению целей
Отметка вторичной обработки
Первичное измерение в ближней зоне
Первичное

Испытания в дорожных условиях: объединение данных радара с видео
Испытания в дорожных условиях: объединение данных радара с видео
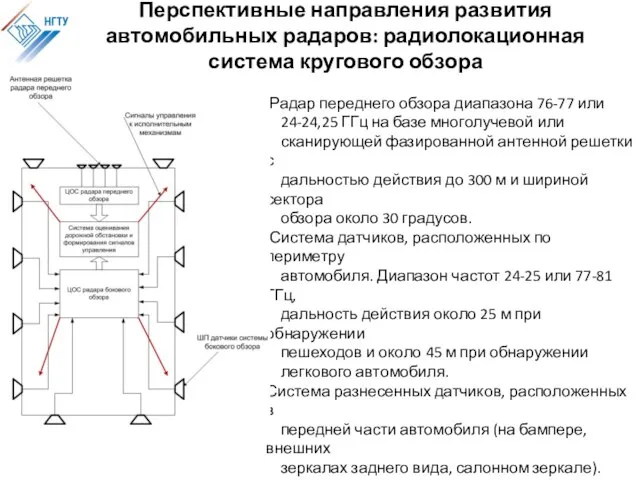
Перспективные направления развития автомобильных радаров: радиолокационная система кругового обзора
Радар переднего
Перспективные направления развития автомобильных радаров: радиолокационная система кругового обзора
Радар переднего
 Устойчивое развитие сельского хозяйства в Республике Тыва
Устойчивое развитие сельского хозяйства в Республике Тыва Техническое обслуживание и ремонт троллейбуса
Техническое обслуживание и ремонт троллейбуса Лошадка из полимерной глины
Лошадка из полимерной глины Буровые вышки
Буровые вышки Remotely Controlling Devices
Remotely Controlling Devices ProSys™ системы инсталляции
ProSys™ системы инсталляции 10 вопросов о русской песне младшим школьникам
10 вопросов о русской песне младшим школьникам Смена владельца сим-карты, МТС
Смена владельца сим-карты, МТС Религия и право
Религия и право Инструменты и приспособления для выполнения ручных работ
Инструменты и приспособления для выполнения ручных работ Овощи
Овощи По страницам любимых сказок
По страницам любимых сказок 20171015_urok_sotsialnye_normy_i_otklonyayushcheesya_povedenie_20_fevralya_2012
20171015_urok_sotsialnye_normy_i_otklonyayushcheesya_povedenie_20_fevralya_2012 Коллоквиум 1
Коллоквиум 1 Импритинг
Импритинг Мастер-план. Индустриальный парк Черняховск
Мастер-план. Индустриальный парк Черняховск Prezentatsia5
Prezentatsia5 Зайчику мій я тебе кохаю безмежно
Зайчику мій я тебе кохаю безмежно Разработка-производство изделий
Разработка-производство изделий Фирменный пассажирский поезд Красная стрела
Фирменный пассажирский поезд Красная стрела Фразовые глаголы
Фразовые глаголы Гибка металла
Гибка металла Классификация текстильных волокон. Зрительные иллюзии в одежде
Классификация текстильных волокон. Зрительные иллюзии в одежде Обеспечение мероприятий по переселению граждан из аварийного жилищного фонда
Обеспечение мероприятий по переселению граждан из аварийного жилищного фонда Интеллектуальная игра Морской бой
Интеллектуальная игра Морской бой 20140224_kultura_i_byt_drevney_rusi
20140224_kultura_i_byt_drevney_rusi Графические объекты
Графические объекты Доклад
Доклад