- Цифровая обработка сигналов

Содержание
- 3. Литература 1. Васильев А.Н. MATLAB. Самоучитель. Практический подход. – СПб.: Наука и техника, 2012. – 448
- 4. Цифровая и аналоговая обработка сигналов
- 5. Дискретное представление сигнала
- 6. Достоинства дискретных систем 1. Возможность реализации сколь угодно сложных алгоритмов обработки сигналов. 2. Простота перестройки алгоритмов.
- 7. Спектр непрерывного периодического сигнала Для периодических сигналов, для которых выполняется условие xн(t) = xн(t + kТп)
- 8. Спектр Xн(jω) непериодического сигнала является комплексной функцией и связан c непрерывном сигналом xн(t) прямым (ППФ) и
- 9. Спектр дискретизированных сигналов Ведем обозначения: xн(t) – непрерывный по времени сигнал, Xн(jω)– спектр непрерывного сигнала, полученный
- 10. Спектры дискретизированных и непрерывных сигналов, теорема отсчетов
- 11. Прямое и обратное преобразования Фурье для дискретизированного сигнала записываются в виде: (2) Преобразование Фурье дискретизированного сигнала
- 12. Из формул (1) и (3) следует: Разобьем ось частот ω на отрезки размером ωд: x(nT) =
- 13. Из сравнения (4) и (2) следует, что Спектр дискретизированного сигнала состоит с точностью до множителя 1/Т
- 14. Возникновение эффекта наложения спектров при недостаточной частоте дискретизации сигнала 7 -
- 15. Восстановление непрерывного сигнала по его дискретным отсчетам
- 16. Если Xн(jω) = 0 при |ω| > ωв, и ωд ≥ 2ωв, эффект наложения спектров отсутствует,
- 17. Непрерывный сигнал xн(t) получается суммированием функций ϕn(t) с весами, определяемыми значениями отсчетов дискретного сигнала x(nT). Рассмотрим
- 18. Рассмотрим некоторые характерные точки функции ϕn(t). При n = 0 ϕ0(t) = 0 при ⇒ ϕ0(t)
- 19. Непрерывный сигнал можно восстановить, пропуская дискретную последовательность через идеальный фильтр низких частот (ФНЧ) (см. на рис.
- 20. Линейные дискретные системы
- 21. Рисунок 11 – Произвольный сигнал, дискретизированный по времени. x(nT) = x(n) при Т = const, –
- 22. Представление произвольного сигнала в виде взвешенной суммы задержанных единичных импульсов: Рисунок 14 – Аналоговый и дискретизированный
- 23. Рисунок 15 – Графические обозначения операций над дискретными сигналами Операции над дискретными сигналами В комплексной форме
- 24. Свойства и параметры дискретных систем
- 25. Линейность Линейная сумма сигналов на входе системы вызывает на выходе сигнал в виде линейной суммы соответствующих
- 26. Описание работы системы с помощью формулы свертки Было показано, что любой сигнал можно представить в виде
- 27. Соединение систем Рисунок 16 – Последовательное соединение систем Рисунок 17 – Параллельное соединение систем При последовательном
- 28. Устойчивость системы Система называется устойчивой, если ограниченный по величине сигнал на входе вызывает ограниченный по величине
- 29. Устойчивость системы Докажем достаточность выполнения условия Предположим, что это условие выполняется. Ограничим величину входного сигнала |x(n)|
- 30. Частотная характеристика системы Частотная характеристика (ЧХ) определяет реакцию системы на входной гармонический сигнал. Пусть на входе
- 31. Частотная характеристика системы Частотная характеристика H(e jωT) = yω(nT) / xω(nT) = [Ay(ω) / Ax(ω)] e
- 32. Методы вычисления частотной характеристики Сформируем на входе системы комплексную синусоиду следующего вида: x(nT) = e jωnT
- 33. Методы вычисления частотной характеристики Вычислим входной сигнал x(nT) и выходной сигнал y(nT) через их Фурье-спектры X(e
- 34. Свойства частотной характеристики ЧХ есть непрерывная функция частоты ω. ЧХ – периодическая функция с периодом, равным
- 35. Преобразование Лапласа Z-преобразование Прямое и обратное преобразования Лапласа соответственно описываются формулами где s – переменная Лапласа,
- 36. Свойства Z-преобразования 1. Свойство линейности Если Z[x1(n)] = X1(z) и Z[x2(n)] = X2(z), то Z[а1x1(n) +
- 37. Связь передаточной функции с частотной характеристикой ЧХ H(e jω) может быть получена из передаточной функции H(z)
- 38. Цифровые фильтры
- 39. Разностные уравнения Система фильтрации сигнала как и системы вообще могут быть описаны дифференциальными уравнениями связывающим входной
- 40. Цифровые фильтры Рисунок 19 – Вычислительная схема цифрового фильтра, соответствующего рассмотренному разностному уравнению Порядок N ЦФ
- 41. Пример цифрового фильтра Рассмотрим рекурсивный фильтр 1-го порядка (см. рис. 20), описываемый разностным уравнением y(n) =
- 42. Пример цифрового фильтра 4. Сигнал на выходе определяется с помощью свертки: 5. Проверка устойчивости Если 0
- 43. Пример цифрового фильтра Если a ≥ 1, то по определению суммы геометрической прогрессии сумма S модулей
- 44. Рисунок 23 – АЧХ исследуемого фильтра К(ω) = |H(e jω)| Рисунок 24 –ФЧХ исследуемого фильтра ϕ(ω)
- 45. Передаточная функция может быть вычислена через коэффициенты разностного уравнения a0 = 1 ⇒ . Выполнив Z-преобразование
- 46. Полюса и нули передаточной функции Разложим числитель и знаменатель передаточной функции H(z) на множители: Передаточная функция
- 47. Полюса и нули передаточной функции Система устойчива, если для всего множества полюсов справедливо: |pk| Рисунок 25
- 48. Полюса и нули передаточной функции Проанализируем устойчивость системы, описанной разностным уравнением y(n) = x(n) + a
- 49. Пример исключения из правил Нерекурсивные фильтры (НРФ) всегда имеют конечную ИХ длины N + 1, причем
- 50. Соотношение параметров, характеризующих ЦФ Рисунок 29 – Соотношение параметров ЦФ Сигнал на выходе ЦФ можно описать:
- 51. Связь характеристик ЦФ: 5. Разностного уравнения и импульсной характеристики: подаем на вход единичный импульс: x(n) =
- 52. Классификация ЦФ по форме АЧХ Рисунок 30 – Классификация ЦФ по параметрам полосы пропускания: а –
- 53. Классификация ЦФ по форме реальной АЧХ Баттерворта – АЧХ в пределах полос пропускания и задерживания изменяется
- 54. Классификация ЦФ по форме АЧХ Чебышева 1 рода – имеются пульсации в полосе пропускания, крутизна АЧХ
- 55. Прямая форма реализации ЦФ Рисунок 36 – Структурная схема прямой формы реализации ЦФ Прямая форма непосредственно
- 56. Каноническая форма реализации ЦФ Передаточная функция ЦФ описывается формулой Представим выражение для передаточной функции в виде
- 57. Каноническая форма реализации ЦФ Выполним прямое а затем обратное Z-преобразование входного x(n), выходного y(n) и «промежуточного»
- 58. Каноническая форма реализации ЦФ Рисунок 38 – Преобразованная форма ЦФ Этим формулам соответствует схема, представленная на
- 59. Транспонированная форма реализации ЦФ Преобразуем основное разностное уравнение ЦФ следующим образом: Изменим прямую форму реализации ЦФ
- 60. Транспонированная форма реализации ЦФ Рисунок 41 – Транспонированная форма представления ЦФ Рисунок 40 – «Промежуточная» вычислительная
- 61. Дискретные преобразования
- 62. Переход к дискретному преобразованию Фурье Выше анализировалась обработка дискретизированных во времени сигналов, имеющих непрерывный по частоте
- 63. Дискретное преобразование Фурье Для таких функций существуют прямое и обратное дискретные преобразования Фурье (ПДПФ и ОДПФ):
- 64. Дискретное преобразование Фурье Введем в этих формулах обозначение: . Тогда получим следующие формы записи для прямого
- 65. Свойства дискретного преобразования Фурье ДПФ – решетчатая функция, отсчеты которой совпадают с соответствующими значениями преобразования Фурье
- 66. 6. Связь с Z-преобразованием: По определению Подстановка дает Так можно вычислить __преобразование Фурье по результатам вычисления
- 67. Вычисление дискретного преобразования Фурье действительных последовательностей Можно вычислить ДПФ двух действительных последовательностей, применив ДПФ один раз.
- 68. Вычисление дискретного преобразования Фурье действительных последовательностей V(k)=Re[X(k)]+jIm[X(k)]+jRe[Y(k)]-Im[Y(k)] ⇒ Re [V(k)] = Re [X(k)] – Im [Y(k)],
- 69. Вычисление обратного ДПФ (ОДПФ) с помощью операции прямого ДПФ (ПДПФ) Пусть известно ДПФ X(k) последовательности x(n)
- 70. Быстрое преобразование Фурье с прореживанием во времени (алгоритм Кули-Тьюки) Дана последовательность x(n), n = 0, …,
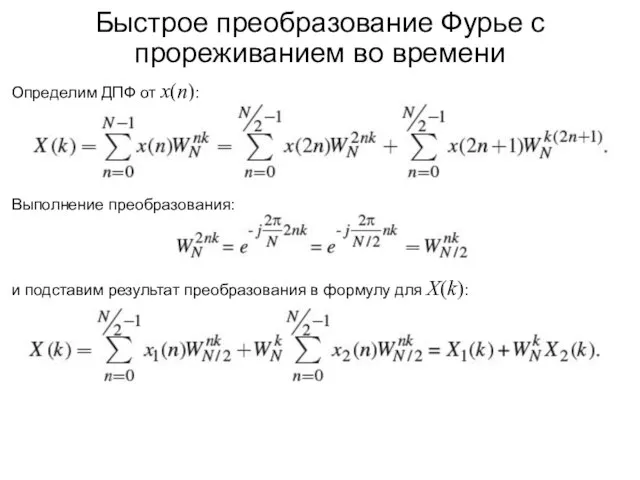
- 71. Быстрое преобразование Фурье с прореживанием во времени Определим ДПФ от x(n): Выполнение преобразования: и подставим результат
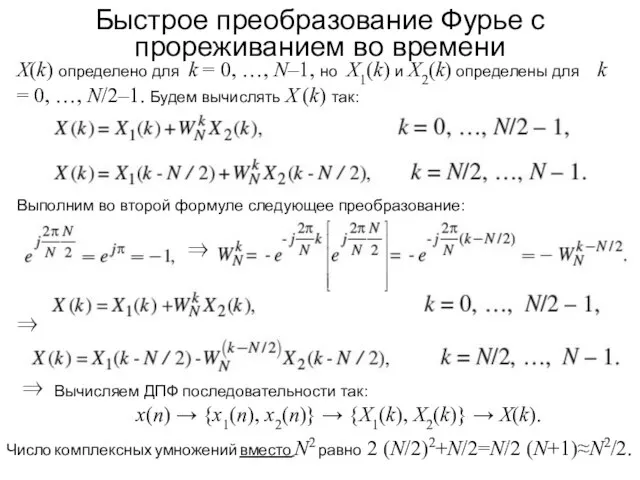
- 72. Быстрое преобразование Фурье с прореживанием во времени X(k) определено для k = 0, …, N–1, но
- 73. Быстрое преобразование Фурье с прореживанием во времени Конечные результаты ДПФ попарно образуются из одних и тех
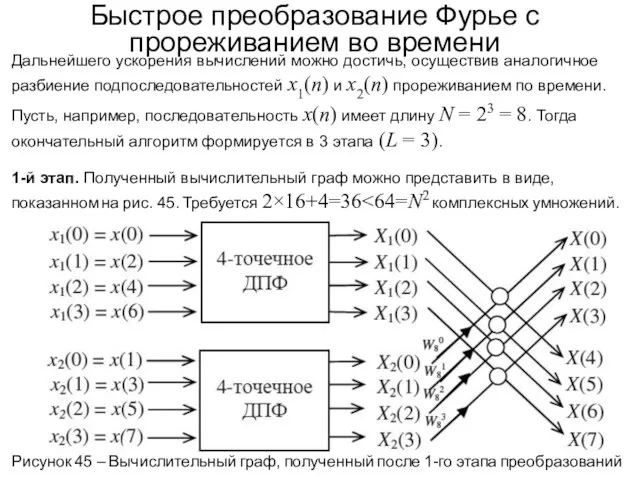
- 74. Быстрое преобразование Фурье с прореживанием во времени Дальнейшего ускорения вычислений можно достичь, осуществив аналогичное разбиение подпоследовательностей
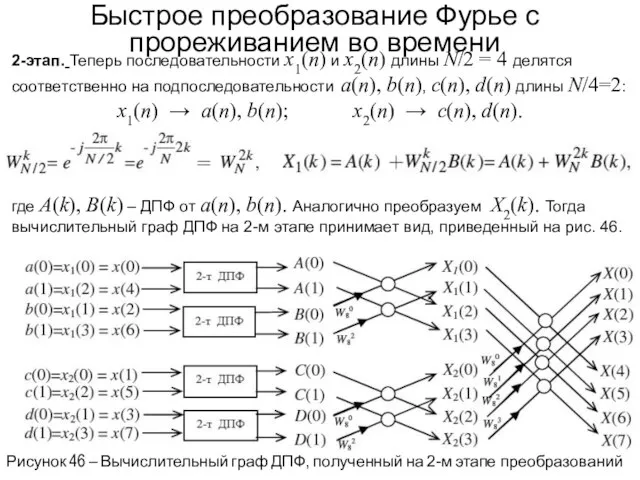
- 75. Быстрое преобразование Фурье с прореживанием во времени 2-этап. Теперь последовательности x1(n) и x2(n) длины N/2 =
- 76. Быстрое преобразование Фурье с прореживанием во времени 3-й этап. Покажем, что двухточечное ДПФ можно выполнитьс помощью
- 77. Быстрое преобразование Фурье с прореживанием во времени Рисунок 49 – Вычислительный граф 8-точечного БПФ с прореживанием
- 78. Быстрое преобразование Фурье с прореживанием по частоте (алгоритм Кули-Тьюки) Дана последовательность x(n), n = 0, …,
- 79. Быстрое преобразование Фурье с прореживанием по частоте По определению ДПФ от x(n) имеет вид: Далее выполняются
- 80. Быстрое преобразование Фурье с прореживанием по частоте Рисунок 52 – Вычислительный граф 8-точечного БПФ с прореживанием
- 81. Быстрое преобразование Фурье (БПФ) Для обоих алгоритмов БПФ количество комплексных умножений можно еще уменьшить, принимая во
- 82. Быстрое преобразование Фурье (БПФ) Пересортировка входных или выходных данных Рисунок 52 – Вычислительный граф 8-точечного БПФ
- 83. Быстрое преобразование Фурье (БПФ) Пересортировка входных или выходных данных Пересортировка данных может быть выполнена с помощью
- 84. Единый подход к алгоритмам БПФ При вычислении БПФ мы считали длину преобразуемой последовательности N=2L, где L
- 85. Единый подход к алгоритмам БПФ 0, 1, 2, …………………………………………………………., 59 Последовательность длиной 60 = 12×5 =
- 86. Единый подход к алгоритмам БПФ Пусть после выполнения ДПФ двумерной последовательности получим также двумерную последовательность, строки
- 87. Единый подход к алгоритмам БПФ Перемножим содержимое скобок в показателе степени в формуле (2) и учтем
- 88. Таким образом ДПФ (1) размерности N = М×L (вычислительная сложность пропорциональна N2 = М2×L2 ) было
- 89. Единый подход к алгоритмам БПФ . (3) . В формуле (3) можно изменить порядок суммирования. (4)
- 90. Единый подход к алгоритмам БПФ Вычислительная сложность 0, 1, 2, 3, …, N-1 Длина последовательности: N
- 91. Единый подход к алгоритмам БПФ Вычислительная сложность: общий случай N=N1×N2×N3×N4× … ×NJ ⇒ Рисунок – Пример
- 92. Быстрая круговая свертка Обозначим через xp(n) и hp(n) дискретные периодические последовательности с одинаковыми периодами, равными N.
- 93. Теорема Бореля Для аналоговых сигналов теорема, сходная с теоремой о свертке была доказана с применением преобразования
- 94. Быстрая линейная (апериодическая) свертка Пусть x(n) – входной сигнал (n = 0, …, Nx–1), h(n) –
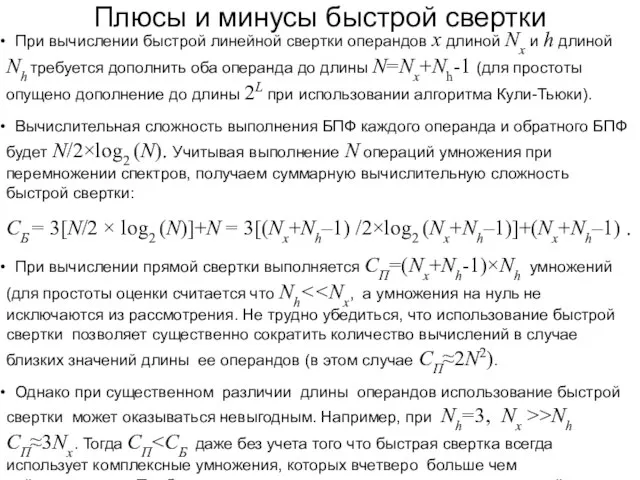
- 95. Плюсы и минусы быстрой свертки При вычислении быстрой линейной свертки операндов x длиной Nx и h
- 96. Секционированная свертка n n n n n n n x3(m) x2(m) x1(m) x0(m) ĥ(m) x(m) h(m)
- 97. Ошибки квантования
- 98. Источники и форма проявления ошибок квантования Квантование – это процесс представления чисел ограниченным числом разрядов. Рисунок
- 99. Ошибки квантования сигнала Рисунок 66 – Ошибки квантования методом усечения Рассмотрим равномерное квантование с шагом Q
- 100. Ошибки квантования сигнала методом усечения Рисунок 68 – Квантование методом усечения: Рисунок 67 – Формирование квантованного
- 101. Ошибки квантования сигнала методом округления Рисунок 69 – Квантование методом округления Кm = mQ – уровни
- 102. Отношение сигнал/шум при квантовании Пусть гармонический сигнал с амплитудой Us квантуется b-разрядным квантователем по методу округления
- 103. Шумы квантования, приведенные к выходу ЦФ Пусть квантованный сигнал на выходе ЦФ x(n) = xн(n)+e(n), где
- 104. Пример расчета параметров шумов квантования на выходе ЦФ Определим дисперсию шумов квантования на выходе цифрового рекурсивного
- 105. Шумы квантования при выполнении арифметических операций в ЦФ Рисунок 71 – Модель ошибки квантования произведения Рассмотрим
- 106. Шумы квантования при выполнении операций умножения в нерекурсивном фильтре Рисунок 72 – Общий вид нерекурсивного фильтра
- 107. Шумы квантования при выполнении операций умножения в нерекурсивном фильтре Рисунок 73 – Нерекурсивный фильтр с ошибками
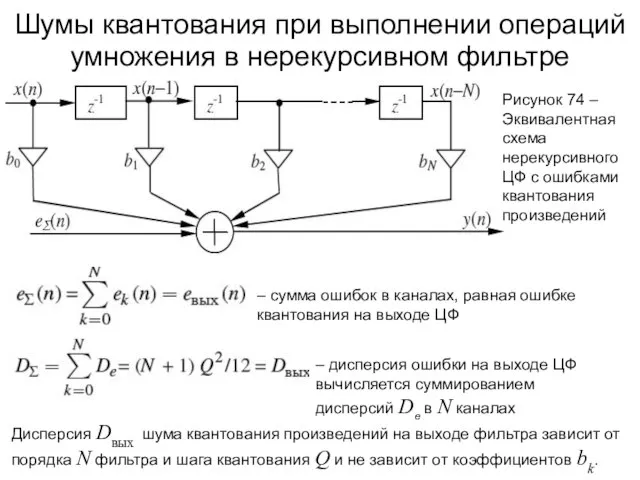
- 108. Шумы квантования при выполнении операций умножения в нерекурсивном фильтре Рисунок 74 – Эквивалентная схема нерекурсивного ЦФ
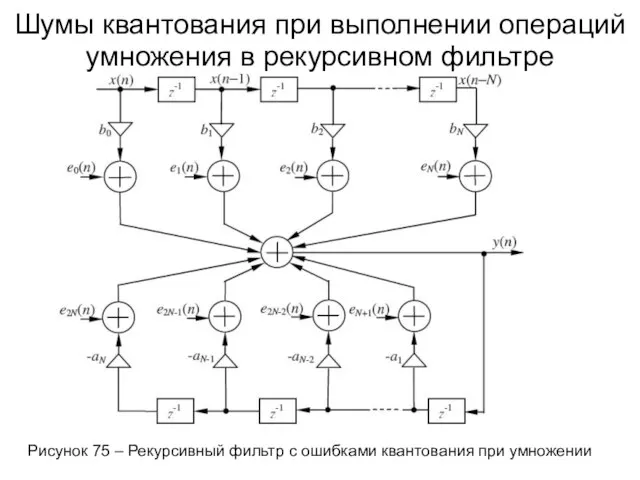
- 109. Шумы квантования при выполнении операций умножения в рекурсивном фильтре Рисунок 75 – Рекурсивный фильтр с ошибками
- 110. Шумы квантования результатов умножения в рекурсивном ЦФ – сумма ошибок в каналах, D∑=(2N+1)Q2/12 – ее дисперсия;
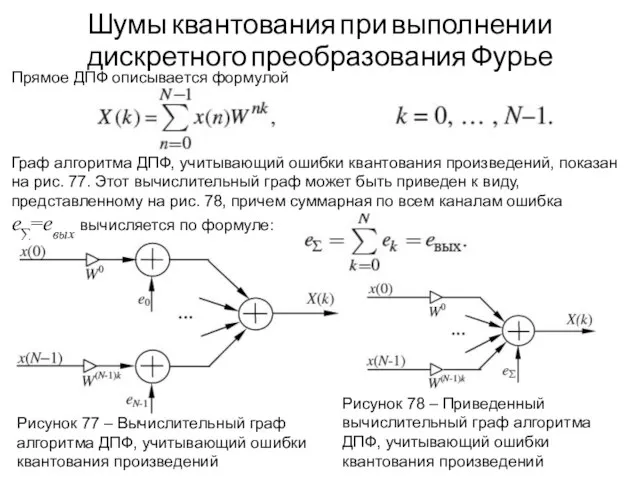
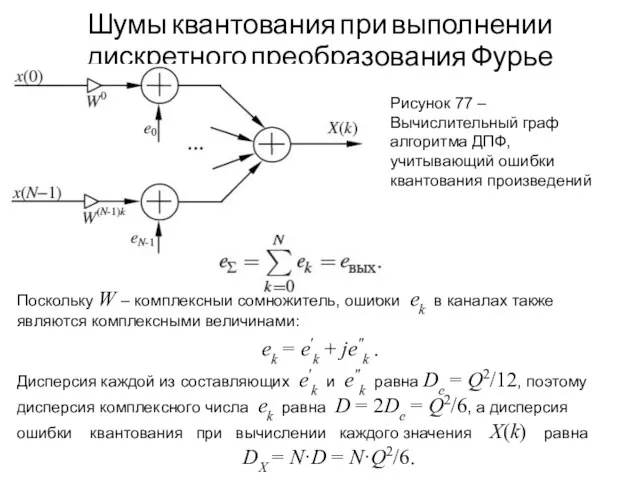
- 111. Шумы квантования при выполнении дискретного преобразования Фурье Прямое ДПФ описывается формулой Граф алгоритма ДПФ, учитывающий ошибки
- 112. Шумы квантования при выполнении дискретного преобразования Фурье Поскольку W – комплексный сомножитель, ошибки ek в каналах
- 113. Шумы квантования при выполнении быстрого преобразования Фурье Рисунок 79 – Вычислительный граф базовой операции БПФ с
- 114. Шумы квантования при выполнении быстрого преобразования Фурье Рисунок 81 – Вычислительный граф 8-точечного БПФ с прореживанием
- 115. Предельные циклы Рисунок 82 – Предельные циклы: сверху входной сигнал; посредине – выходной сигнал при k0
- 116. Предельные циклы Рассмотрим пример рекурсивного фильтра 1-го порядка, описываемого разностным уравнением y(n) = x(n)+a·y(n–1), а =
- 117. Предельные циклы Если а > 0, то k0 имеет постоянный знак, при а Рисунок 83 –
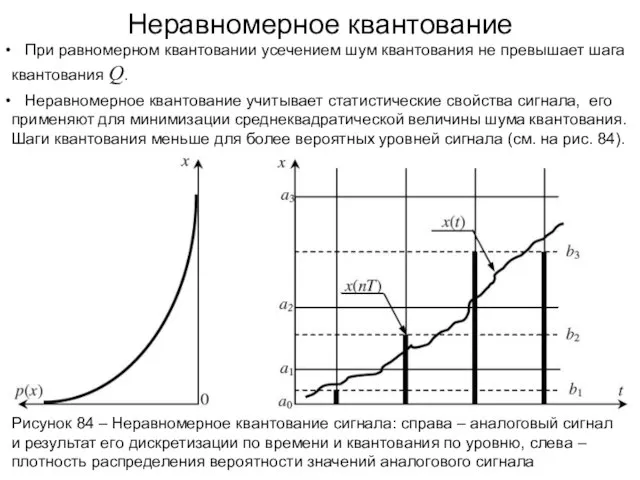
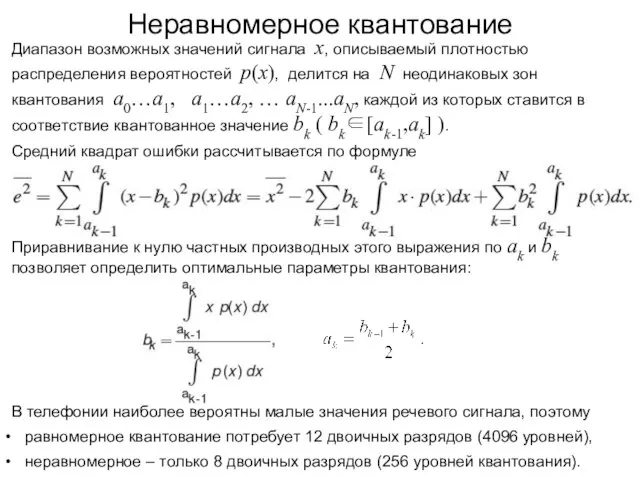
- 118. Неравномерное квантование Рисунок 84 – Неравномерное квантование сигнала: справа – аналоговый сигнал и результат его дискретизации
- 119. Неравномерное квантование В телефонии наиболее вероятны малые значения речевого сигнала, поэтому равномерное квантование потребует 12 двоичных
- 120. Спектральный анализ В контексте цифровой обработки сигналов с помощью спектрального анализа будем обнаруживать на фоне шумов
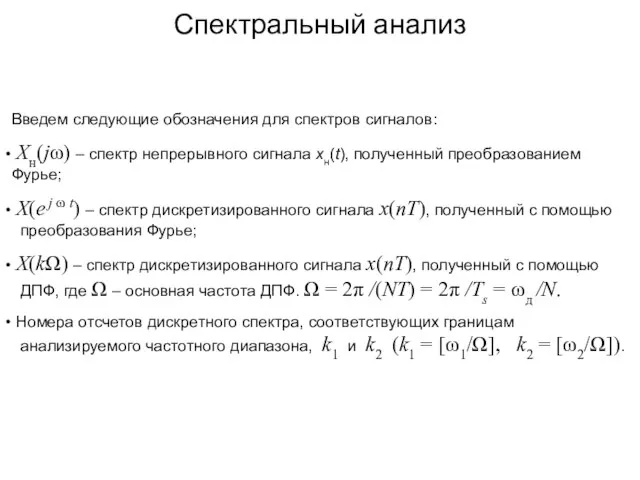
- 121. Введем следующие обозначения для спектров сигналов: Xн(jω) – спектр непрерывного сигнала xн(t), полученный преобразованием Фурье; X(e
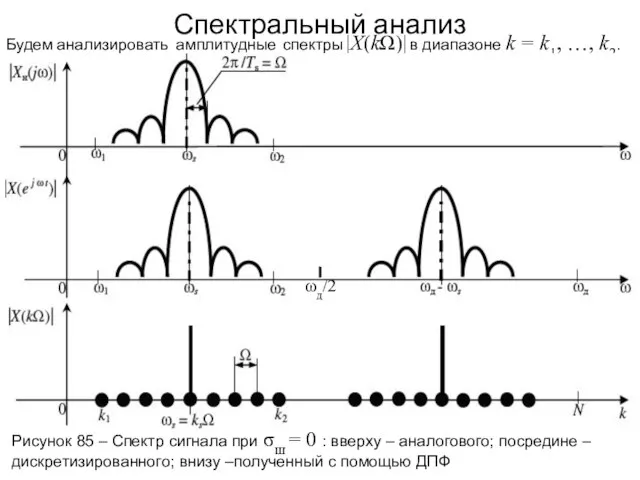
- 122. Спектральный анализ Будем анализировать амплитудные спектры |X(kΩ)| в диапазоне k = k1, …, k2. Рисунок 85
- 123. Спектральный анализ: обнаружение сигнала Согласно статистической теории обнаружения сигнала при наличии шумов в канале связи рассматриваются
- 124. Спектральный анализ: обнаружение сигнала Статистическими характеристиками обнаружителя являются: вероятность F ложной тревоги – вероятность принятия гипотезы
- 125. Спектральный анализ: характеристики обнаружителя Находится зависимость вероятности ложной тревоги от величины порога: F = func(Uп) при
- 126. Спектральный анализ: измерение параметров обнаруженного сигнала Измерение амплитуды Us и частоты ωs сигнала производится, только если
- 127. Ошибка измерения частоты δωs = ωs – ωs* – случайная величина, равномерно __распределенная в интервале [–Ω/2,
- 128. Расчет статистических характеристик обнаружения сигнала и измерения его параметров Для расчета статистических характеристик обнаружения и измерений
- 129. Расчет статистических характеристик обнаружения сигнала и измерения его параметров Для каждого i-того испытания, в котором обнаружен
- 130. Двумерные унитарные преобразования
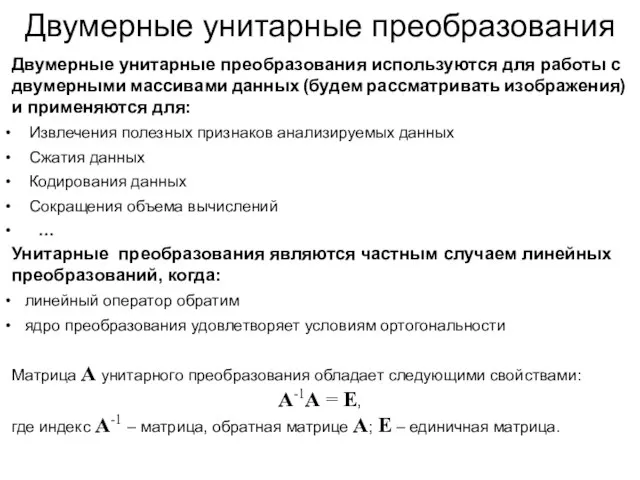
- 131. Двумерные унитарные преобразования Двумерные унитарные преобразования используются для работы с двумерными массивами данных (будем рассматривать изображения)
- 132. Двумерные унитарные преобразования В результате прямого унитарного преобразования матрица изображения F(n1,n2) размерами N1×N2 преобразуется в матрицу
- 133. Двумерные унитарные преобразования Результат выполнения оператора разделимого двумерного унитарного преобразования можно находить в два этапа: Сначала
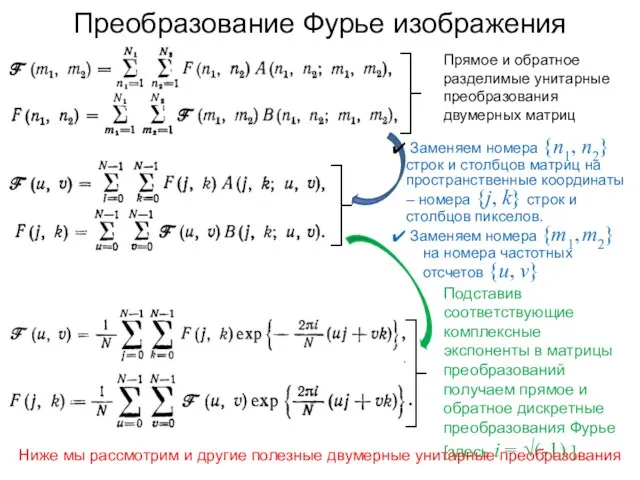
- 134. Преобразование Фурье изображения Прямое и обратное разделимые унитарные преобразования двумерных матриц Заменяем номера {n1, n2} строк
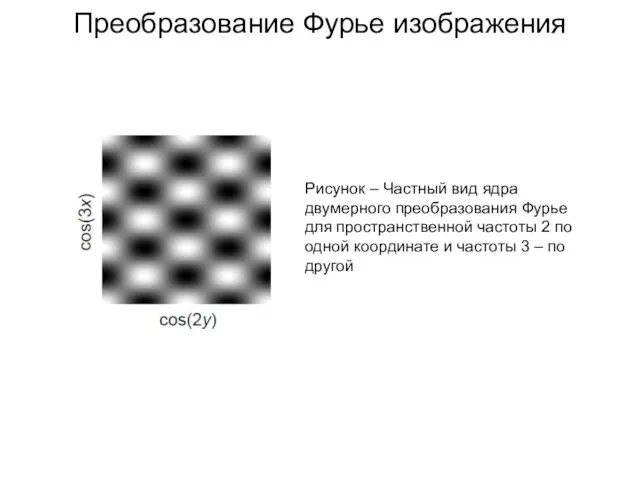
- 135. Преобразование Фурье изображения Рисунок – Частный вид ядра двумерного преобразования Фурье для пространственной частоты 2 по
- 136. Преобразование Фурье изображения Представим по формулам Эйлера комплексные экспоненты в виде сумм косинусов и синусов. Получаем
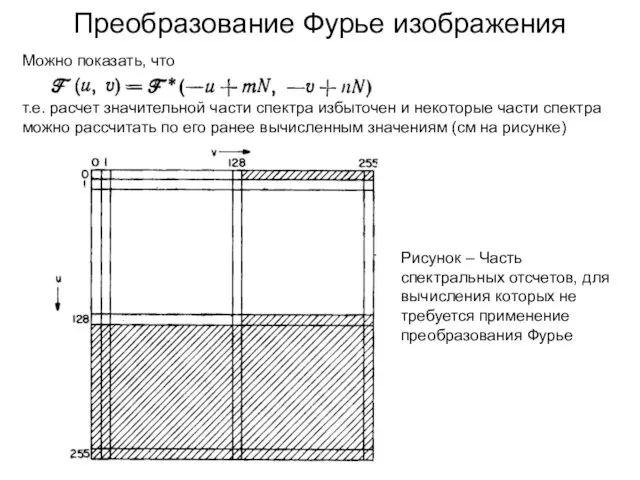
- 137. Преобразование Фурье изображения Подставив u=u+mN и v=v+nN, где m и n – постоянные, получим т.е. вычисленный
- 138. Можно показать, что , т.е. расчет значительной части спектра избыточен и некоторые части спектра можно рассчитать
- 139. Особенности дискретного преобразования Фурье (ДПФ) Физические спектрометры располагают низкочастотные гармоники в центре, а ___ДПФ располагает их
- 140. Симметричные дискретные косинусные преобразования (ДКП) ДПФ создает действительные косинусные базисные спектральные ___компоненты и мнимые синусные компоненты.
- 141. Симметричное четное ДКП Рисунок – Формирование изображения для четного ДКП где в F (j, k) номера
- 142. Симметричное четное ДКП Массив Fs(j, k) симметричен относительно начала координат и состоит из действительных чисел, следовательно,
- 143. Симметричное четное ДКП Обратное четное симметричное ДКП вычисляют с теми же значениями C(w): На рисунке слева
- 144. Базисные функции ДПФ и ДКП
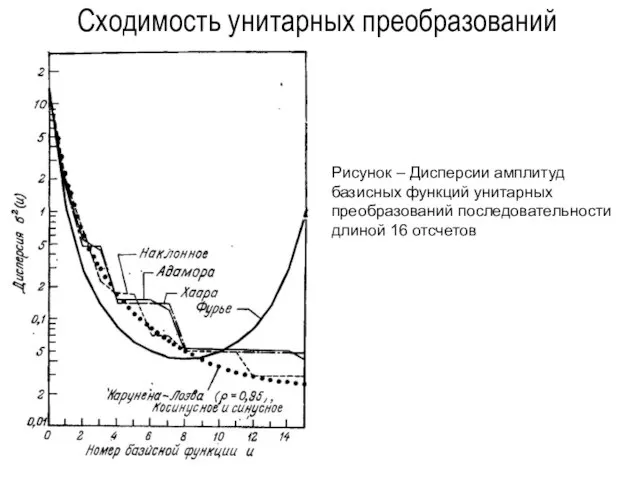
- 145. Сходимость унитарных преобразований Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности длиной 16 отсчетов
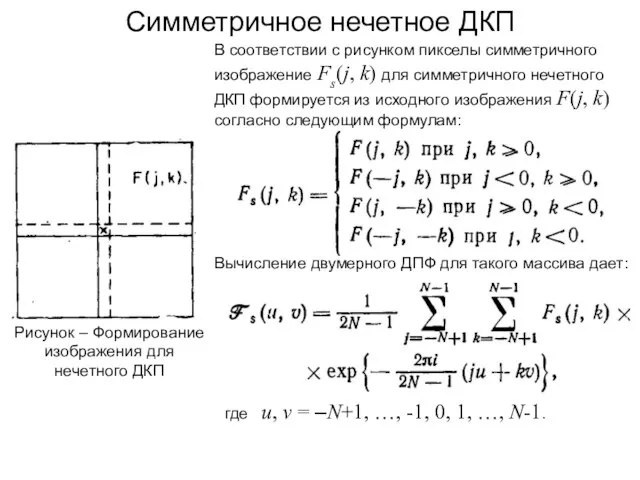
- 146. Симметричное нечетное ДКП Рисунок – Формирование изображения для нечетного ДКП В соответствии с рисунком пикселы симметричного
- 147. Симметричное нечетное ДКП Поскольку преобразование Фурье обладает свойством симметрии относительно комплексного сопряжения, то для реальных изображений
- 148. Симметричное нечетное ДКП Чтобы базисные функции нечетного симметричного ДКП стали ортонормированными, вычисление производится по следующим формулам:
- 149. Симметричное нечетное ДКП Обратное преобразование Базисные функции нечетного ДКП разделимы, поэтому двумерное преобразование можно выполнить в
- 150. Дискретное синусное преобразование где j=0, …, N–1 – номера строк пикселов, а k=0, …, N–1 –
- 151. Дискретное синусное преобразование Рисунок – Базисные функции дискретного синусного преобразования для последовательности длиной 16 отсчетов
- 152. Преобразование Карунена-Лоэва C – ковариационная матрица E – математическое ожидание xk – k-тый компонент вектора mk
- 153. Преобразование Карунена-Лоэва Пусть имеется множество векторов x, заданных в N-мерном пространстве признаков. Рассчитаем для них ковариационную
- 154. Дискретное синусное преобразование Преобразование Карунена-Лоэва «поворачивает» исходный базис {x1, x2, …, xN} представления векторов так, чтобы
- 155. Преобразование Карунена-Лоэва Рисунок – Базисные функции преобразования Карунена-Лоэва для последовательности длиной 16 отсчетов
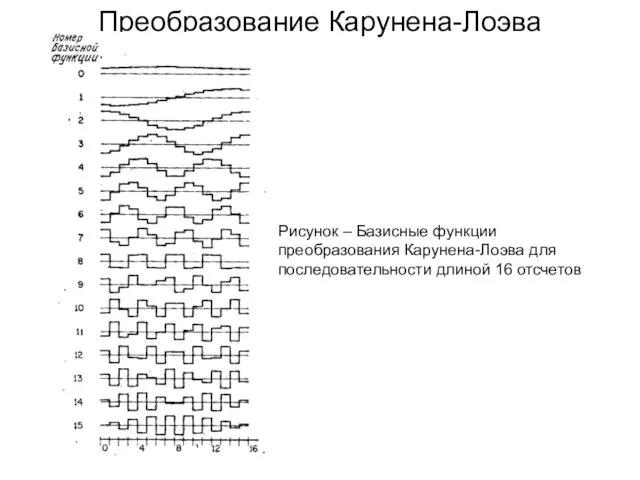
- 156. Разложение по негармоническим функциям
- 157. Импульсы блока Рисунок – Последовательность из 8 импульсов блока Импульсы блока просты в цифровой реализации ортогональны
- 158. Функции Уолша Рисунок – Функции Уолша для последовательности длиной 16 отсчетов Функции Уолша ортогональны образуют полную
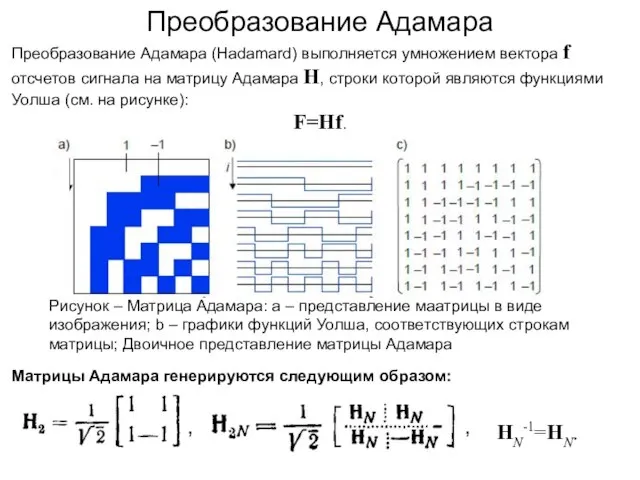
- 159. Преобразование Адамара Преобразование Адамара (Hadamard) выполняется умножением вектора f отсчетов сигнала на матрицу Адамара H, строки
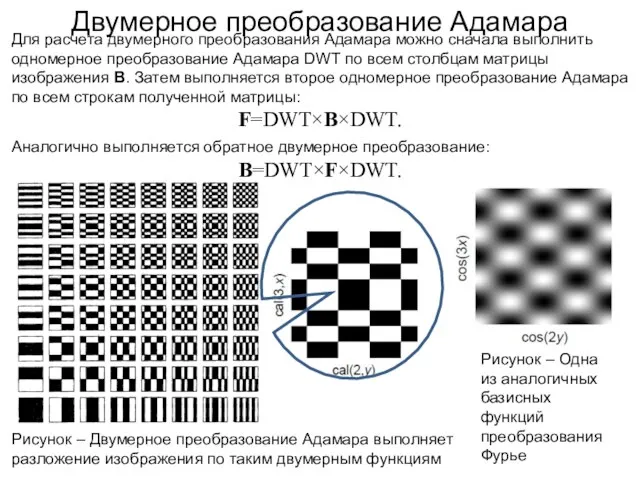
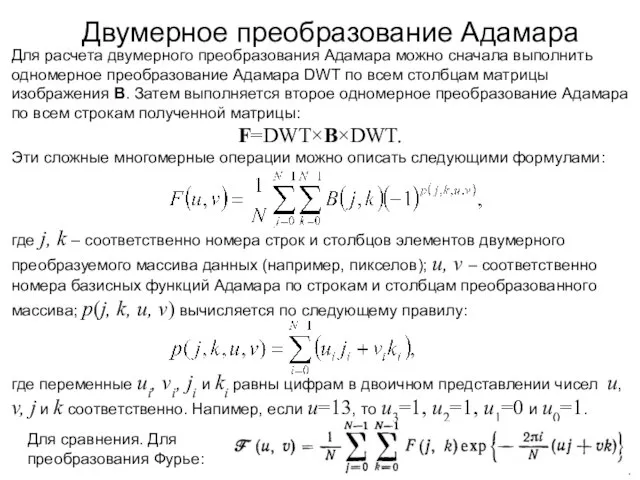
- 160. Двумерное преобразование Адамара Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное преобразование Адамара DWT по
- 161. Двумерное преобразование Адамара Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное преобразование Адамара DWT по
- 162. Преобразование Хаара Рисунок – Базисные функции преобразования Хаара для последовательности длиной 16 отсчетов Вычисление одномерного преобразования
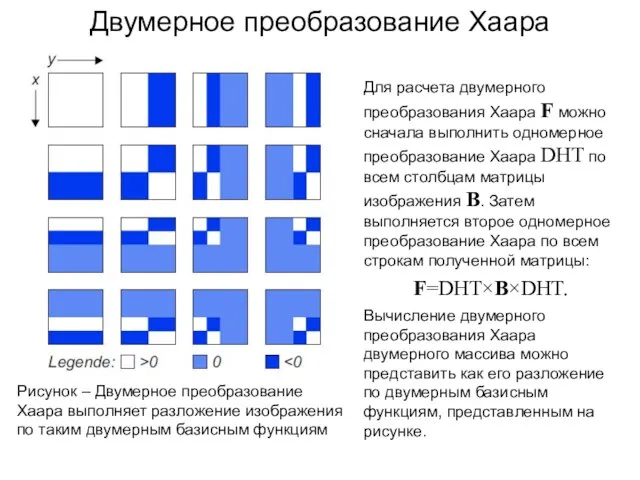
- 163. Двумерное преобразование Хаара Для расчета двумерного преобразования Хаара F можно сначала выполнить одномерное преобразование Хаара DHT
- 164. Наклонное преобразование (slant transform) Рисунок – Базисные функции наклонного преобразования для последовательности из 16 отсчетов Вычисление
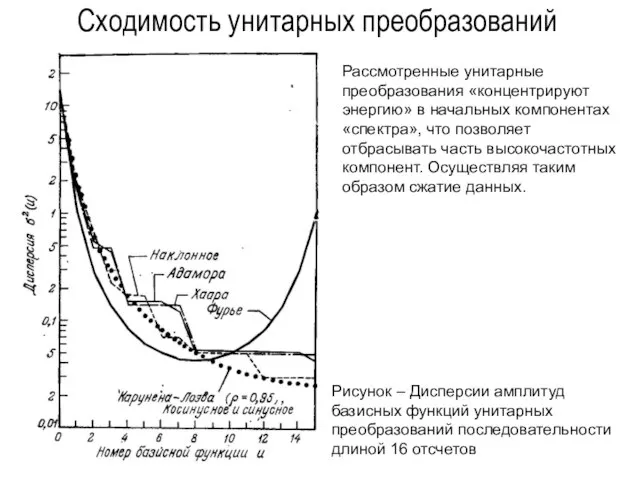
- 165. Сходимость унитарных преобразований Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности длиной 16 отсчетов Рассмотренные
- 166. Сингулярное преобразование
- 167. Симметричное нечетное ДКП
- 168. Симметричное нечетное ДКП
- 169. Симметричное нечетное ДКП
- 170. Симметричное нечетное ДКП
- 171. Симметричное нечетное ДКП
- 173. Скачать презентацию

Литература
1. Васильев А.Н. MATLAB. Самоучитель. Практический подход. – СПб.: Наука и
Литература
1. Васильев А.Н. MATLAB. Самоучитель. Практический подход. – СПб.: Наука и

Цифровая и аналоговая обработка сигналов
Цифровая и аналоговая обработка сигналов
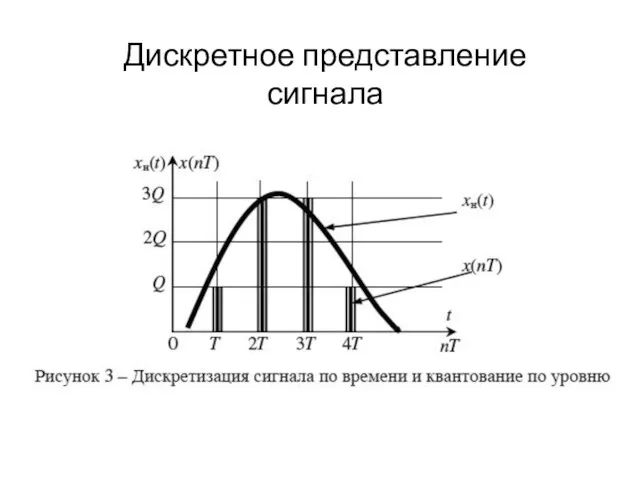
Дискретное представление сигнала
Дискретное представление сигнала

Достоинства дискретных систем
1. Возможность реализации сколь угодно сложных алгоритмов обработки сигналов.
2.
Достоинства дискретных систем
1. Возможность реализации сколь угодно сложных алгоритмов обработки сигналов.
2.
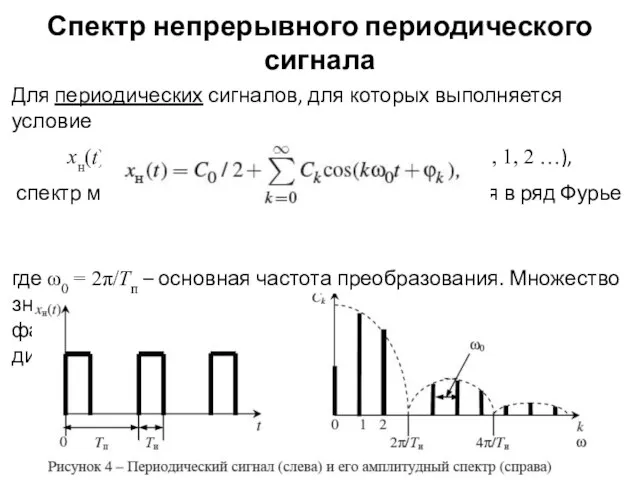
Спектр непрерывного периодического сигнала
Для периодических сигналов, для которых выполняется условие
xн(t) =
Спектр непрерывного периодического сигнала
Для периодических сигналов, для которых выполняется условие
xн(t) =
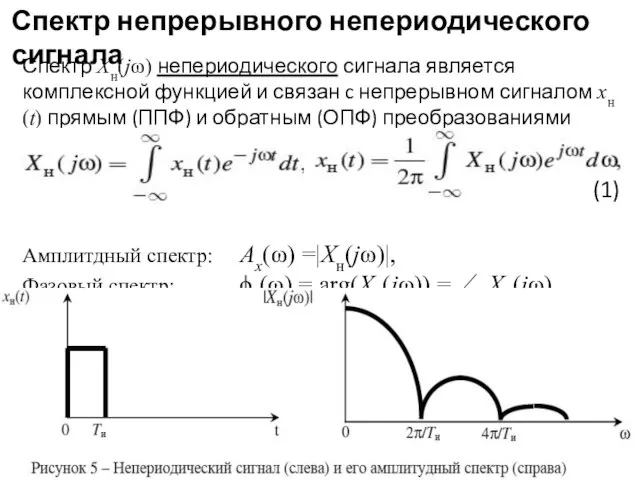
Спектр Xн(jω) непериодического сигнала является комплексной функцией и связан c непрерывном
Спектр Xн(jω) непериодического сигнала является комплексной функцией и связан c непрерывном
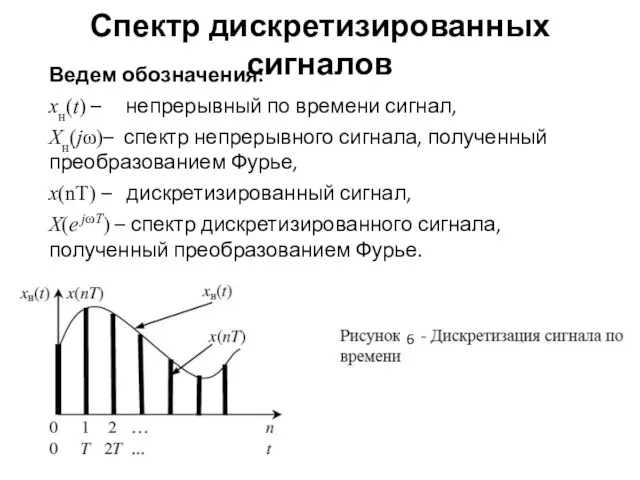
Спектр дискретизированных сигналов
Ведем обозначения:
xн(t) – непрерывный по времени сигнал,
Xн(jω)– спектр непрерывного
Спектр дискретизированных сигналов
Ведем обозначения:
xн(t) – непрерывный по времени сигнал,
Xн(jω)– спектр непрерывного
Спектры дискретизированных и непрерывных сигналов, теорема отсчетов
Спектры дискретизированных и непрерывных сигналов, теорема отсчетов
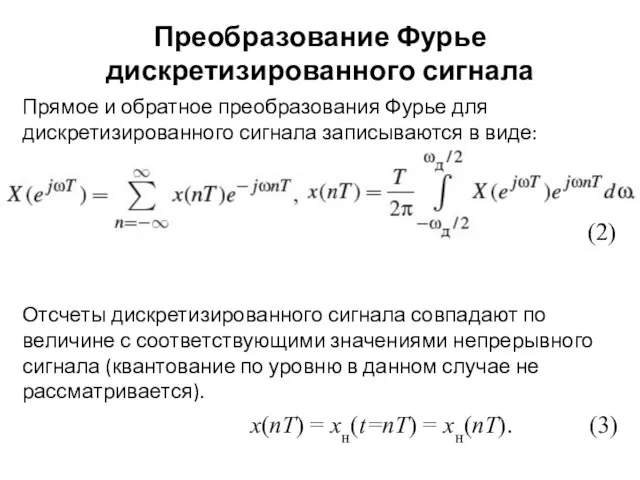
Прямое и обратное преобразования Фурье для дискретизированного сигнала записываются в виде:
(2)
Преобразование
Прямое и обратное преобразования Фурье для дискретизированного сигнала записываются в виде:
(2)
Преобразование
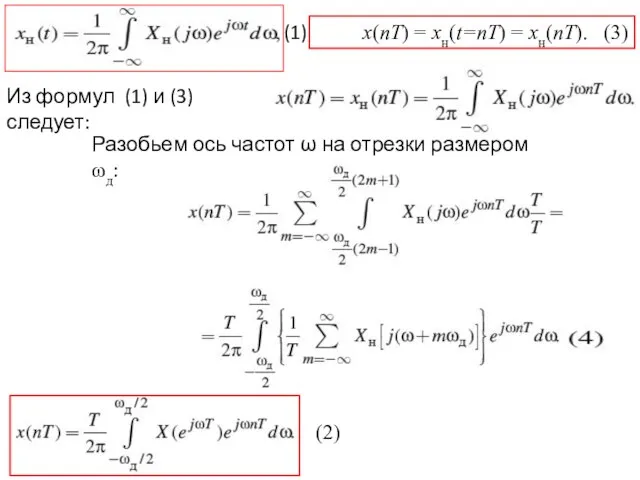
Из формул (1) и (3) следует:
Разобьем ось частот ω на отрезки
Из формул (1) и (3) следует:
Разобьем ось частот ω на отрезки
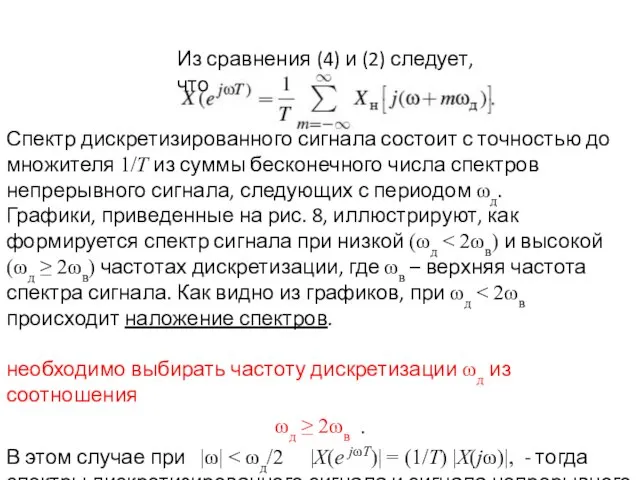
Из сравнения (4) и (2) следует, что
Спектр дискретизированного сигнала состоит с
Из сравнения (4) и (2) следует, что
Спектр дискретизированного сигнала состоит с
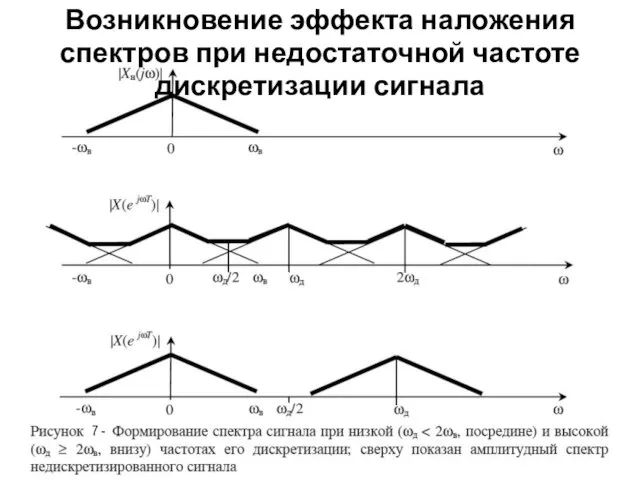
Возникновение эффекта наложения спектров при недостаточной частоте дискретизации сигнала
7 -
Возникновение эффекта наложения спектров при недостаточной частоте дискретизации сигнала
7 -
Восстановление непрерывного сигнала по его дискретным отсчетам
Восстановление непрерывного сигнала по его дискретным отсчетам
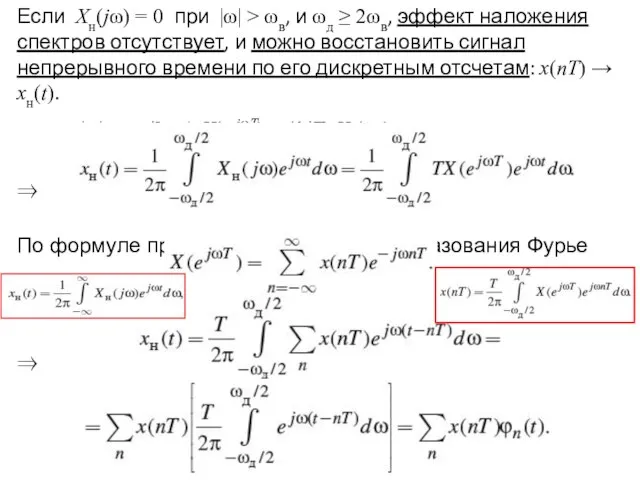
Если Xн(jω) = 0 при |ω| > ωв, и ωд ≥
Если Xн(jω) = 0 при |ω| > ωв, и ωд ≥
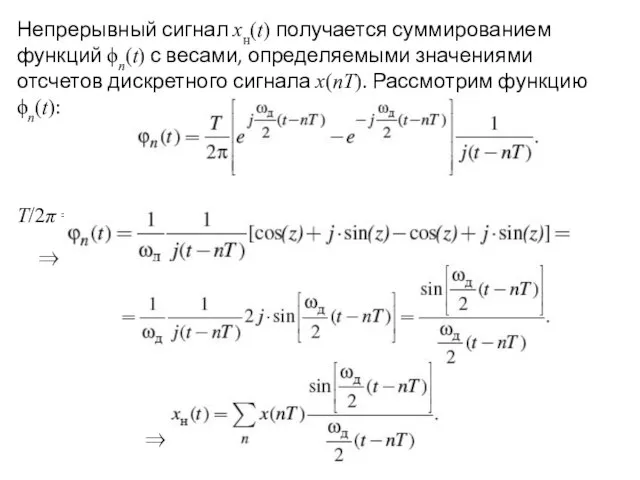
Непрерывный сигнал xн(t) получается суммированием функций ϕn(t) с весами, определяемыми значениями
Непрерывный сигнал xн(t) получается суммированием функций ϕn(t) с весами, определяемыми значениями

Рассмотрим некоторые характерные точки функции ϕn(t).
При n = 0
ϕ0(t) = 0
Рассмотрим некоторые характерные точки функции ϕn(t).
При n = 0
ϕ0(t) = 0
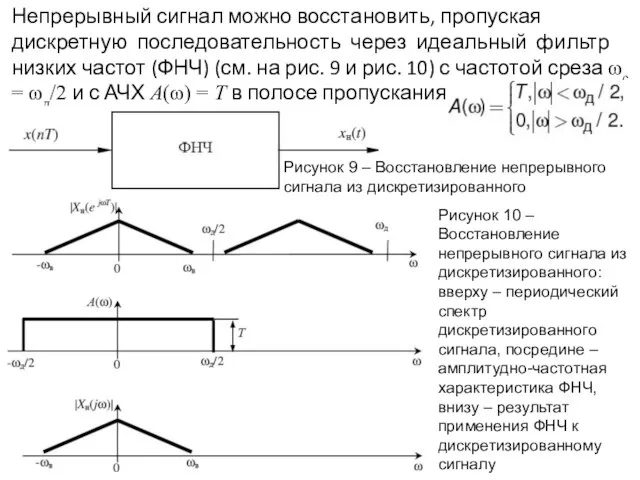
Непрерывный сигнал можно восстановить, пропуская дискретную последовательность через идеальный фильтр низких
Непрерывный сигнал можно восстановить, пропуская дискретную последовательность через идеальный фильтр низких
Линейные дискретные системы
Линейные дискретные системы
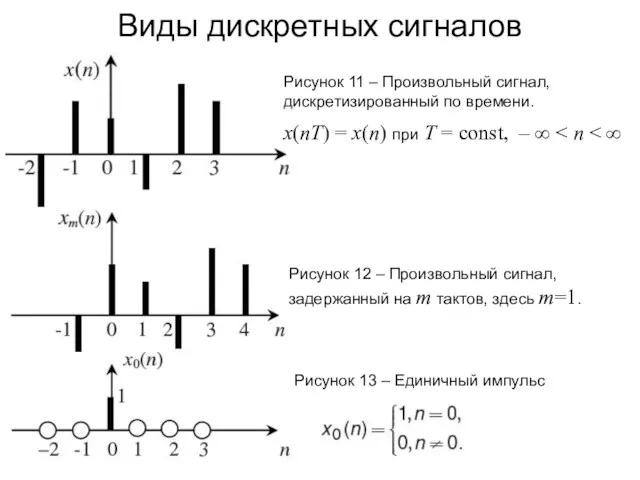
Рисунок 11 – Произвольный сигнал, дискретизированный по времени.
x(nT) = x(n)
Рисунок 11 – Произвольный сигнал, дискретизированный по времени.
x(nT) = x(n)
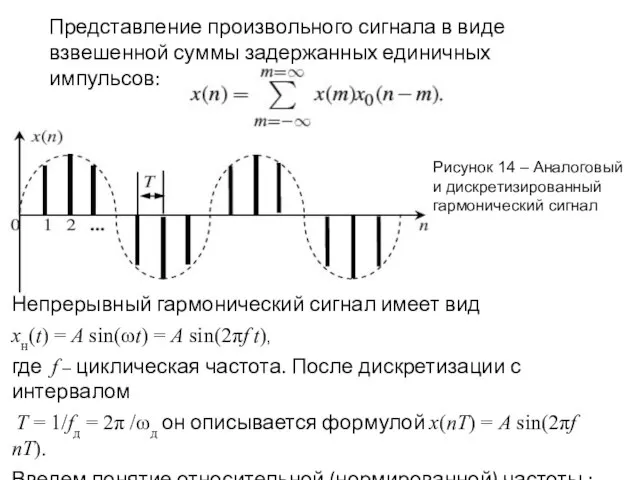
Представление произвольного сигнала в виде взвешенной суммы задержанных единичных импульсов:
Рисунок
Представление произвольного сигнала в виде взвешенной суммы задержанных единичных импульсов:
Рисунок
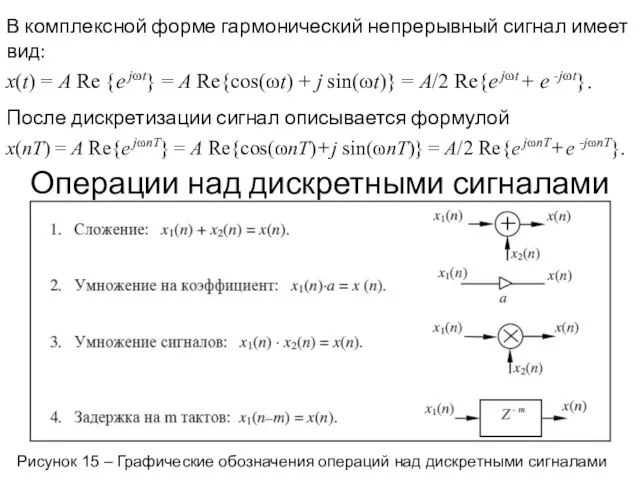
Рисунок 15 – Графические обозначения операций над дискретными сигналами
Операции над дискретными
Рисунок 15 – Графические обозначения операций над дискретными сигналами
Операции над дискретными

Свойства и параметры дискретных систем
Свойства и параметры дискретных систем

Линейность
Линейная сумма сигналов на входе системы вызывает на выходе сигнал в
Линейность
Линейная сумма сигналов на входе системы вызывает на выходе сигнал в
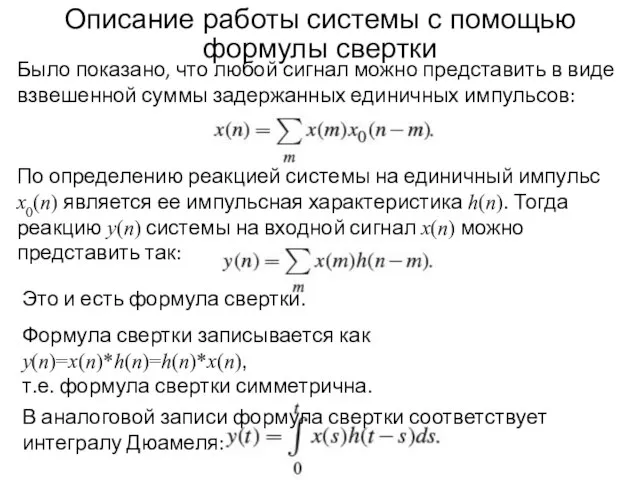
Описание работы системы с помощью формулы свертки
Было показано, что любой сигнал
Описание работы системы с помощью формулы свертки
Было показано, что любой сигнал
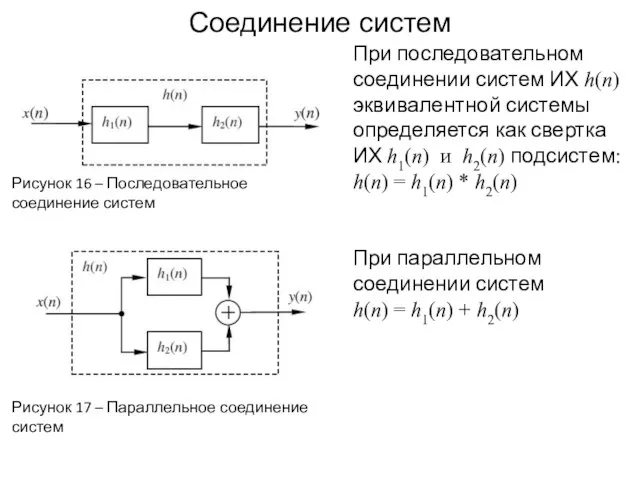
Соединение систем
Рисунок 16 – Последовательное соединение систем
Рисунок 17 – Параллельное соединение
Соединение систем
Рисунок 16 – Последовательное соединение систем
Рисунок 17 – Параллельное соединение
Устойчивость системы
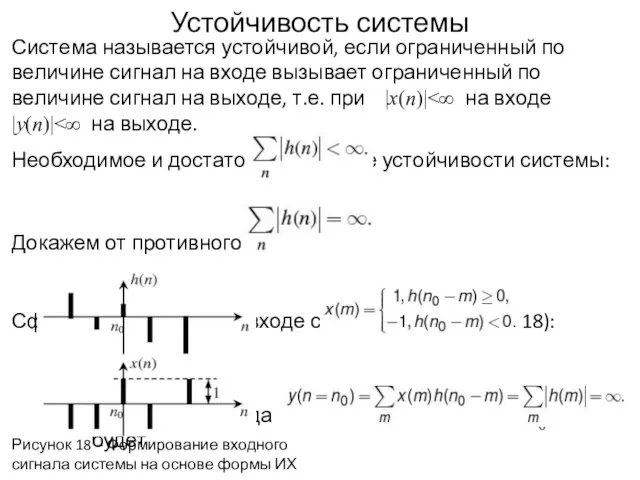
Система называется устойчивой, если ограниченный по величине сигнал на входе
Устойчивость системы
Система называется устойчивой, если ограниченный по величине сигнал на входе

Устойчивость системы
Докажем достаточность выполнения условия
Предположим, что это условие выполняется.
Ограничим величину
Устойчивость системы
Докажем достаточность выполнения условия
Предположим, что это условие выполняется.
Ограничим величину
Частотная характеристика системы
Частотная характеристика (ЧХ) определяет реакцию системы на входной гармонический
Частотная характеристика системы
Частотная характеристика (ЧХ) определяет реакцию системы на входной гармонический
Частотная характеристика системы
Частотная характеристика
H(e jωT) = yω(nT) / xω(nT) = [Ay(ω)
Частотная характеристика системы
Частотная характеристика
H(e jωT) = yω(nT) / xω(nT) = [Ay(ω)
Методы вычисления частотной характеристики
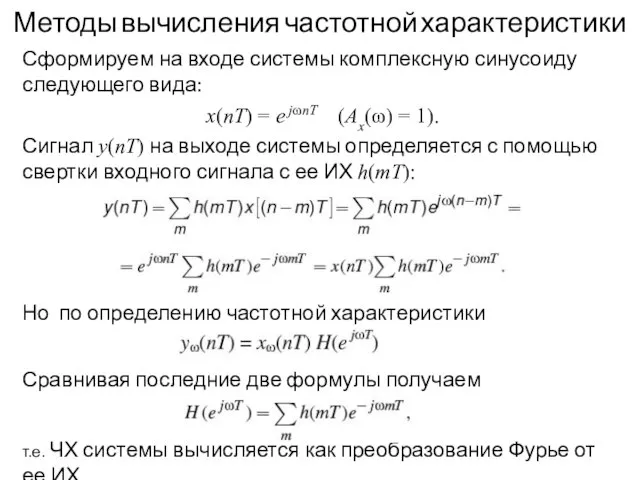
Сформируем на входе системы комплексную синусоиду следующего вида:
x(nT)
Методы вычисления частотной характеристики
Сформируем на входе системы комплексную синусоиду следующего вида:
x(nT)
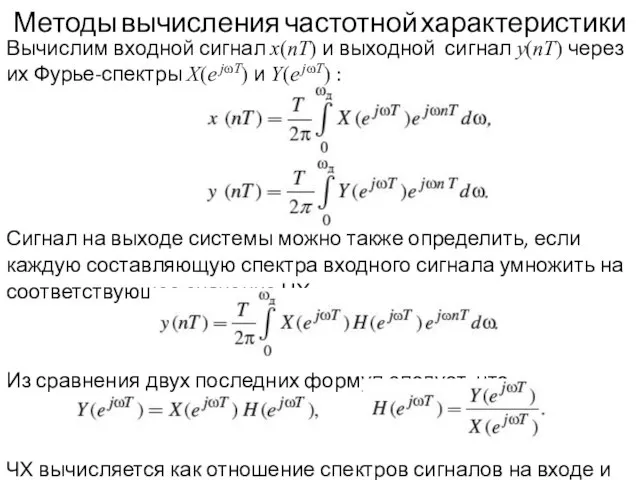
Методы вычисления частотной характеристики
Вычислим входной сигнал x(nT) и выходной сигнал y(nT)
Методы вычисления частотной характеристики
Вычислим входной сигнал x(nT) и выходной сигнал y(nT)

Свойства частотной характеристики
ЧХ есть непрерывная функция частоты ω.
ЧХ – периодическая
Свойства частотной характеристики
ЧХ есть непрерывная функция частоты ω.
ЧХ – периодическая

Преобразование Лапласа
Z-преобразование
Прямое и обратное преобразования Лапласа соответственно описываются формулами
где s –
Преобразование Лапласа
Z-преобразование
Прямое и обратное преобразования Лапласа соответственно описываются формулами
где s –
![Свойства Z-преобразования 1. Свойство линейности Если Z[x1(n)] = X1(z) и Z[x2(n)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/524321/slide-35.jpg)
Свойства Z-преобразования
1. Свойство линейности
Если Z[x1(n)] = X1(z) и Z[x2(n)] = X2(z),
Свойства Z-преобразования
1. Свойство линейности
Если Z[x1(n)] = X1(z) и Z[x2(n)] = X2(z),

Связь передаточной функции с частотной характеристикой
ЧХ H(e jω) может быть получена
Связь передаточной функции с частотной характеристикой
ЧХ H(e jω) может быть получена
Цифровые фильтры
Цифровые фильтры
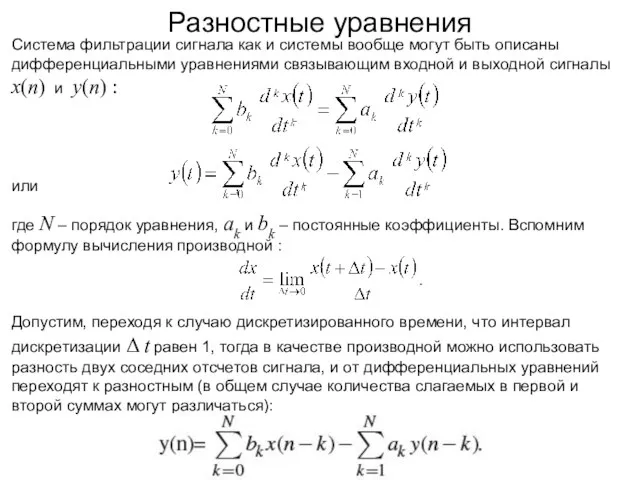
Разностные уравнения
Система фильтрации сигнала как и системы вообще могут быть описаны
Разностные уравнения
Система фильтрации сигнала как и системы вообще могут быть описаны

Цифровые фильтры
Рисунок 19 – Вычислительная схема цифрового фильтра, соответствующего рассмотренному разностному
Цифровые фильтры
Рисунок 19 – Вычислительная схема цифрового фильтра, соответствующего рассмотренному разностному
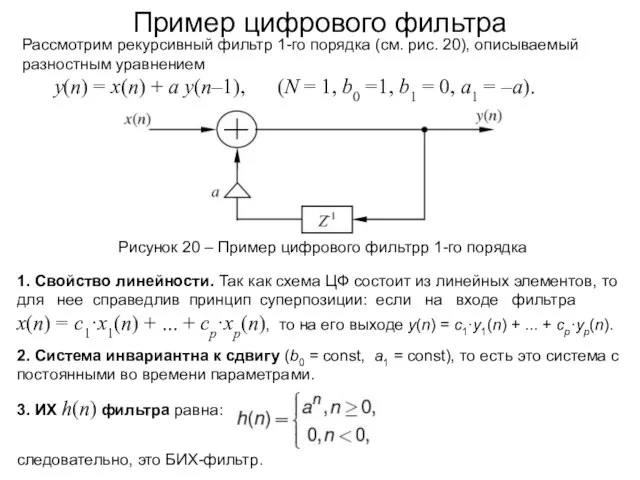
Пример цифрового фильтра
Рассмотрим рекурсивный фильтр 1-го порядка (см. рис. 20), описываемый
Пример цифрового фильтра
Рассмотрим рекурсивный фильтр 1-го порядка (см. рис. 20), описываемый
Пример цифрового фильтра
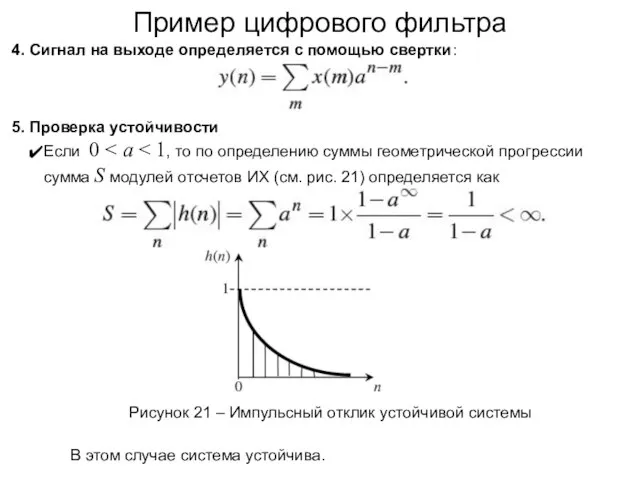
4. Сигнал на выходе определяется с помощью свертки:
5. Проверка
Пример цифрового фильтра
4. Сигнал на выходе определяется с помощью свертки:
5. Проверка
Пример цифрового фильтра
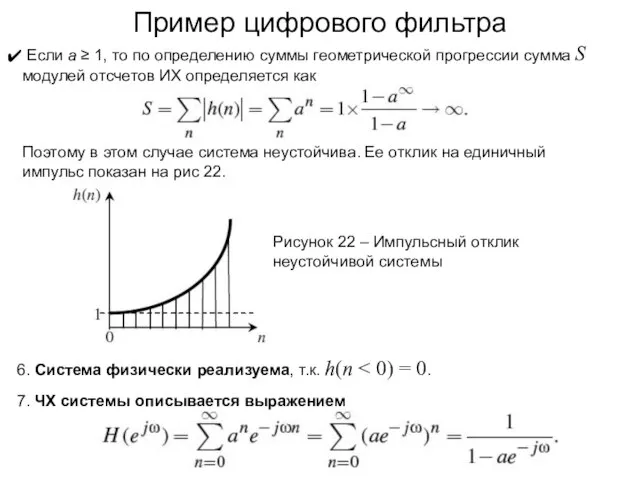
Если a ≥ 1, то по определению суммы
Пример цифрового фильтра
Если a ≥ 1, то по определению суммы
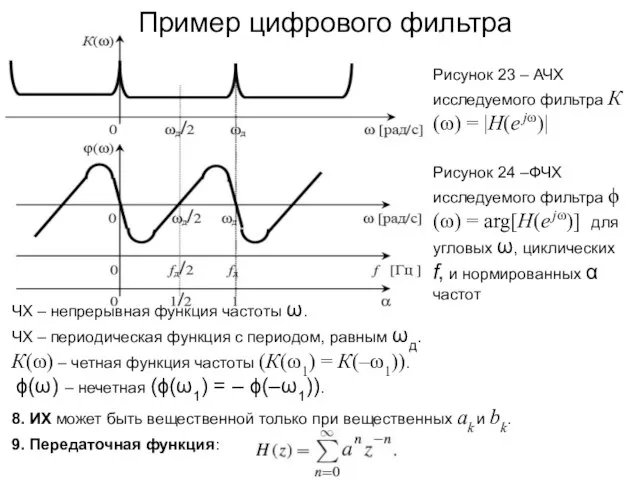
Рисунок 23 – АЧХ исследуемого фильтра К(ω) = |H(e jω)|
Рисунок 24
Рисунок 23 – АЧХ исследуемого фильтра К(ω) = |H(e jω)|
Рисунок 24

Передаточная функция может быть вычислена через коэффициенты разностного уравнения
a0 = 1
Передаточная функция может быть вычислена через коэффициенты разностного уравнения
a0 = 1
Полюса и нули передаточной функции
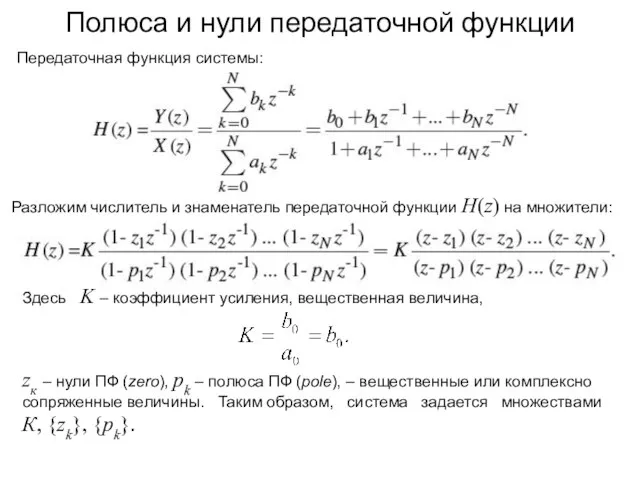
Разложим числитель и знаменатель передаточной функции H(z)
Полюса и нули передаточной функции
Разложим числитель и знаменатель передаточной функции H(z)
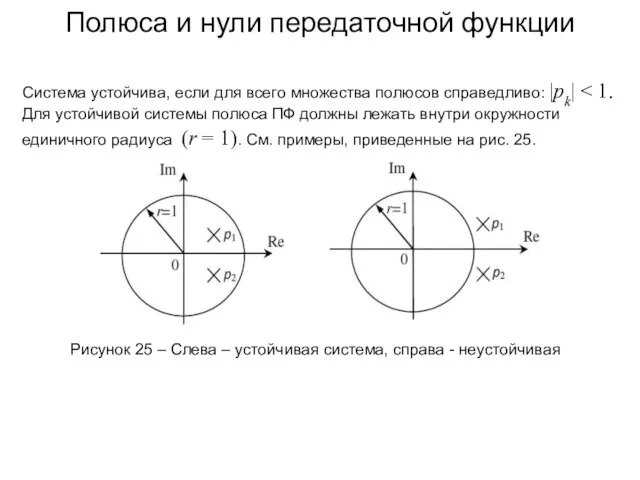
Полюса и нули передаточной функции
Система устойчива, если для всего множества полюсов
Полюса и нули передаточной функции
Система устойчива, если для всего множества полюсов

Полюса и нули передаточной функции
Проанализируем устойчивость системы, описанной разностным уравнением
y(n) =
Полюса и нули передаточной функции
Проанализируем устойчивость системы, описанной разностным уравнением
y(n) =

Пример исключения из правил
Нерекурсивные фильтры (НРФ) всегда имеют конечную ИХ длины
Пример исключения из правил
Нерекурсивные фильтры (НРФ) всегда имеют конечную ИХ длины
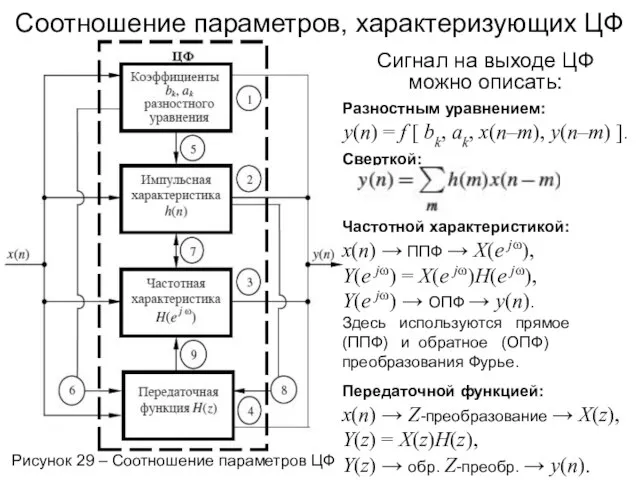
Соотношение параметров, характеризующих ЦФ
Рисунок 29 – Соотношение параметров ЦФ
Сигнал на выходе
Соотношение параметров, характеризующих ЦФ
Рисунок 29 – Соотношение параметров ЦФ
Сигнал на выходе

Связь характеристик ЦФ:
5. Разностного уравнения и импульсной характеристики: подаем на вход
Связь характеристик ЦФ:
5. Разностного уравнения и импульсной характеристики: подаем на вход
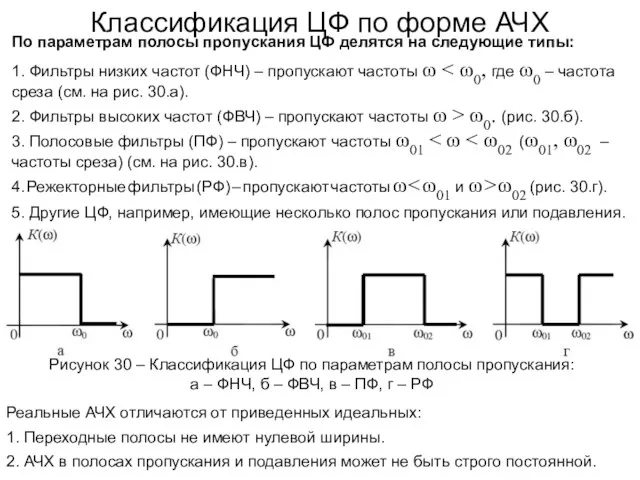
Классификация ЦФ по форме АЧХ
Рисунок 30 – Классификация ЦФ по параметрам
Классификация ЦФ по форме АЧХ
Рисунок 30 – Классификация ЦФ по параметрам
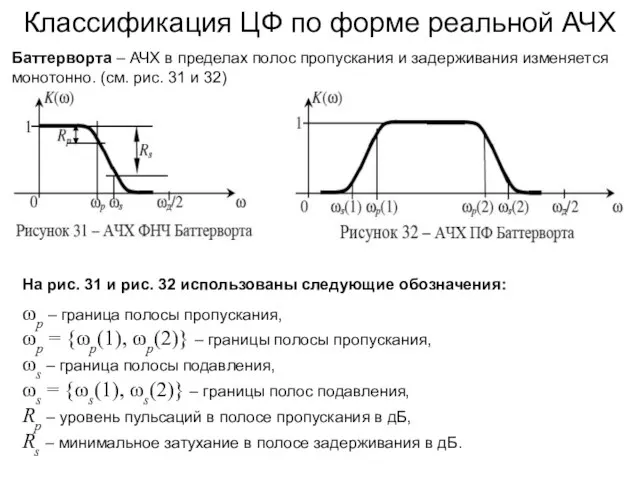
Классификация ЦФ по форме реальной АЧХ
Баттерворта – АЧХ в пределах полос
Классификация ЦФ по форме реальной АЧХ
Баттерворта – АЧХ в пределах полос

Классификация ЦФ по форме АЧХ
Чебышева 1 рода – имеются пульсации в
Классификация ЦФ по форме АЧХ
Чебышева 1 рода – имеются пульсации в
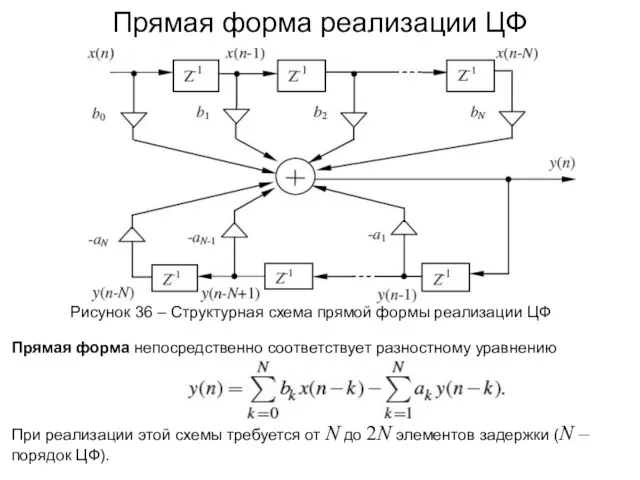
Прямая форма реализации ЦФ
Рисунок 36 – Структурная схема прямой формы реализации
Прямая форма реализации ЦФ
Рисунок 36 – Структурная схема прямой формы реализации
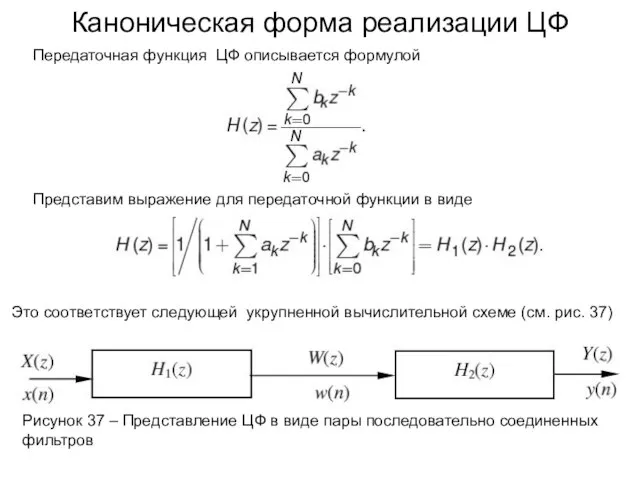
Каноническая форма реализации ЦФ
Передаточная функция ЦФ описывается формулой
Представим выражение для передаточной
Каноническая форма реализации ЦФ
Передаточная функция ЦФ описывается формулой
Представим выражение для передаточной

Каноническая форма реализации ЦФ
Выполним прямое а затем обратное Z-преобразование входного x(n),
Каноническая форма реализации ЦФ
Выполним прямое а затем обратное Z-преобразование входного x(n),

Каноническая форма реализации ЦФ
Рисунок 38 – Преобразованная форма ЦФ
Этим формулам соответствует
Каноническая форма реализации ЦФ
Рисунок 38 – Преобразованная форма ЦФ
Этим формулам соответствует
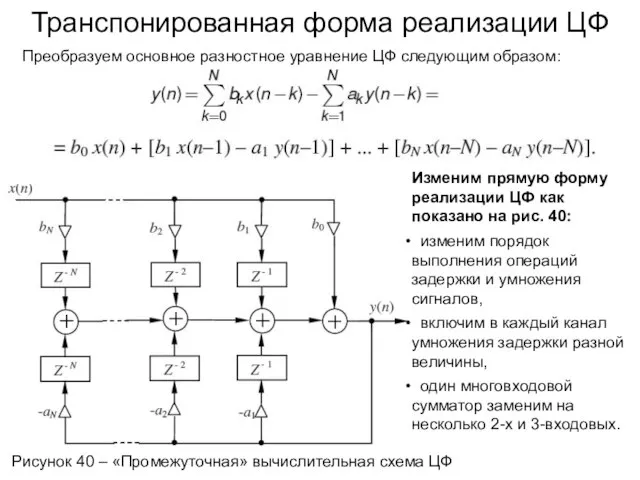
Транспонированная форма реализации ЦФ
Преобразуем основное разностное уравнение ЦФ следующим образом:
Изменим прямую
Транспонированная форма реализации ЦФ
Преобразуем основное разностное уравнение ЦФ следующим образом:
Изменим прямую
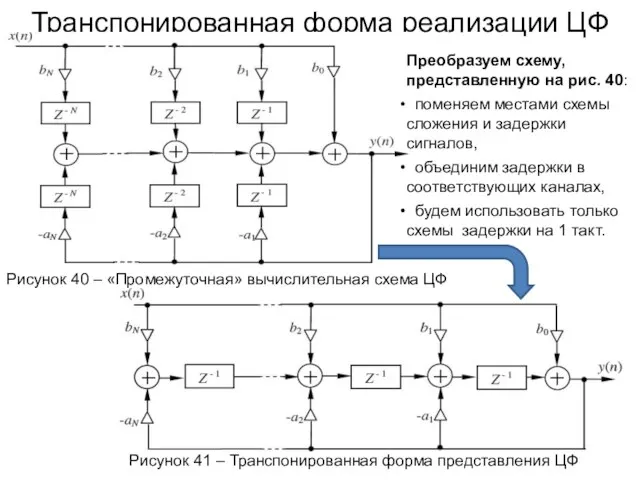
Транспонированная форма реализации ЦФ
Рисунок 41 – Транспонированная форма представления ЦФ
Рисунок 40
Транспонированная форма реализации ЦФ
Рисунок 41 – Транспонированная форма представления ЦФ
Рисунок 40
Дискретные преобразования
Дискретные преобразования
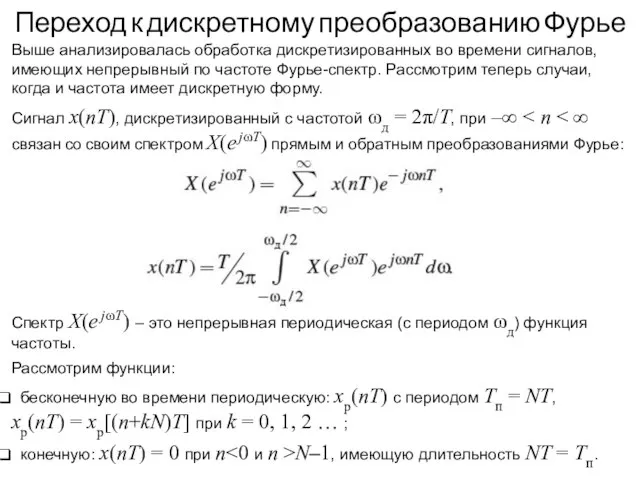
Переход к дискретному преобразованию Фурье
Выше анализировалась обработка дискретизированных во времени сигналов,
Переход к дискретному преобразованию Фурье
Выше анализировалась обработка дискретизированных во времени сигналов,
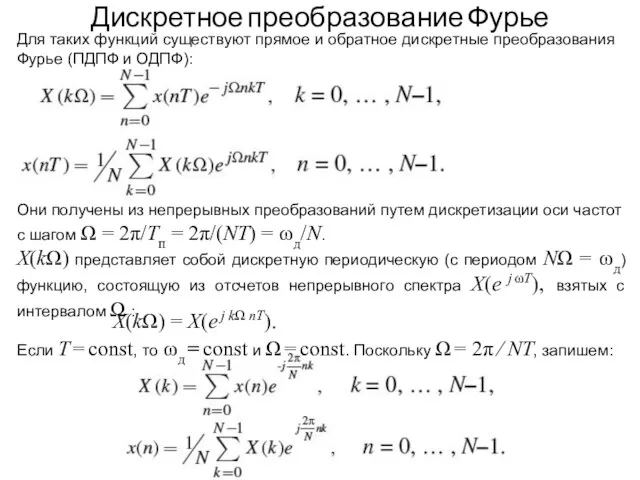
Дискретное преобразование Фурье
Для таких функций существуют прямое и обратное дискретные преобразования
Дискретное преобразование Фурье
Для таких функций существуют прямое и обратное дискретные преобразования

Дискретное преобразование Фурье
Введем в этих формулах обозначение:
.
Тогда получим следующие формы записи
Дискретное преобразование Фурье
Введем в этих формулах обозначение:
.
Тогда получим следующие формы записи
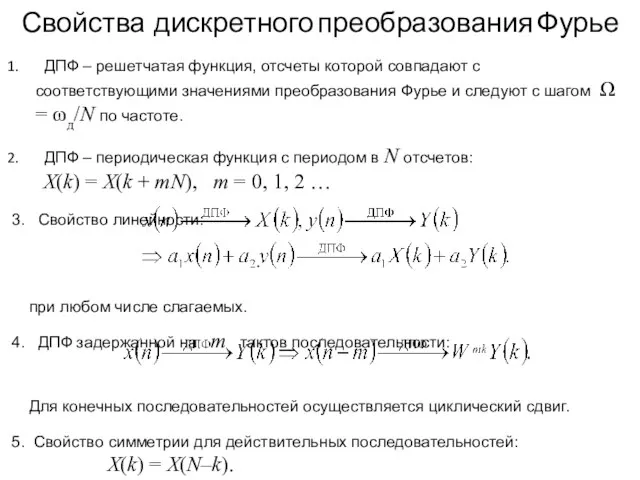
Свойства дискретного преобразования Фурье
ДПФ – решетчатая функция, отсчеты которой совпадают
Свойства дискретного преобразования Фурье
ДПФ – решетчатая функция, отсчеты которой совпадают
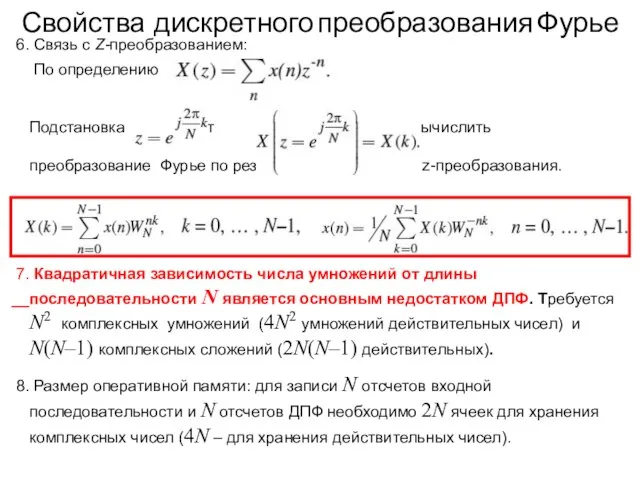
6. Связь с Z-преобразованием:
По определению
Подстановка дает Так можно вычислить
6. Связь с Z-преобразованием:
По определению
Подстановка дает Так можно вычислить
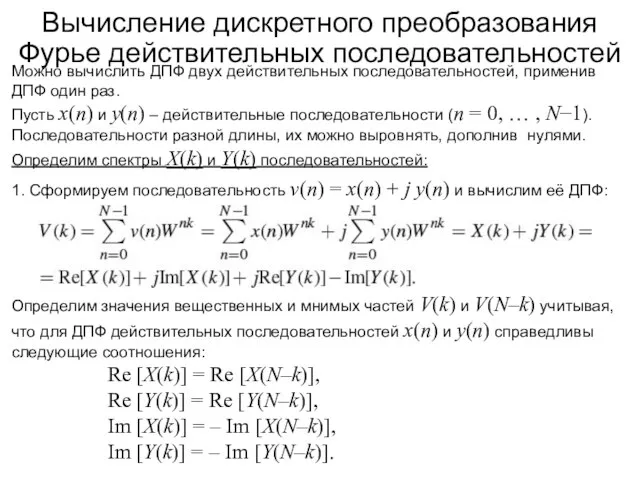
Вычисление дискретного преобразования Фурье действительных последовательностей
Можно вычислить ДПФ двух действительных последовательностей,
Вычисление дискретного преобразования Фурье действительных последовательностей
Можно вычислить ДПФ двух действительных последовательностей,
![Вычисление дискретного преобразования Фурье действительных последовательностей V(k)=Re[X(k)]+jIm[X(k)]+jRe[Y(k)]-Im[Y(k)] ⇒ Re [V(k)] =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/524321/slide-67.jpg)
Вычисление дискретного преобразования Фурье действительных последовательностей
V(k)=Re[X(k)]+jIm[X(k)]+jRe[Y(k)]-Im[Y(k)] ⇒
Re [V(k)] =
Вычисление дискретного преобразования Фурье действительных последовательностей
V(k)=Re[X(k)]+jIm[X(k)]+jRe[Y(k)]-Im[Y(k)] ⇒
Re [V(k)] =
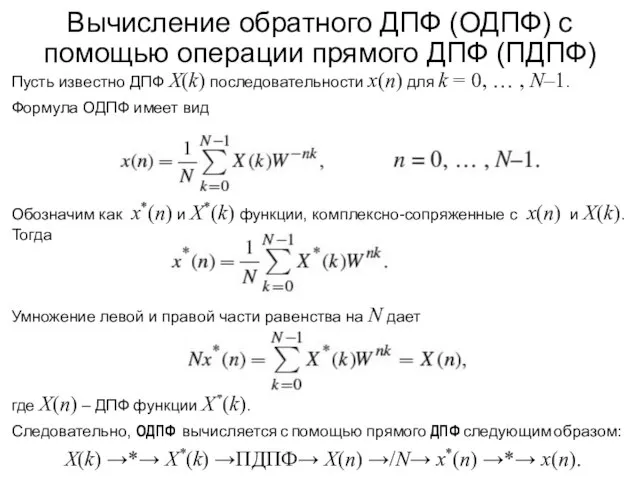
Вычисление обратного ДПФ (ОДПФ) с помощью операции прямого ДПФ (ПДПФ)
Пусть известно
Вычисление обратного ДПФ (ОДПФ) с помощью операции прямого ДПФ (ПДПФ)
Пусть известно
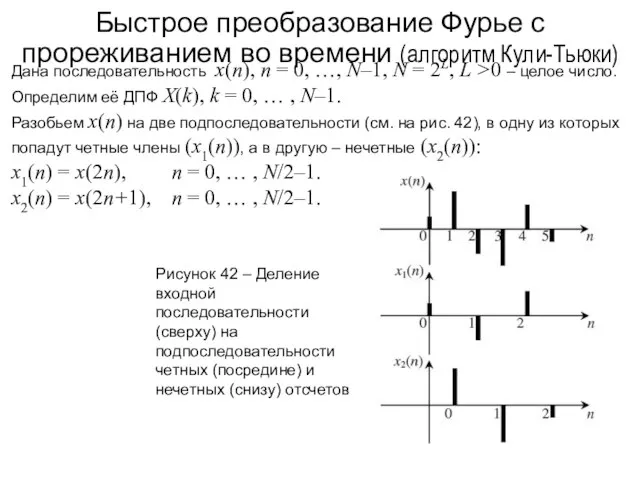
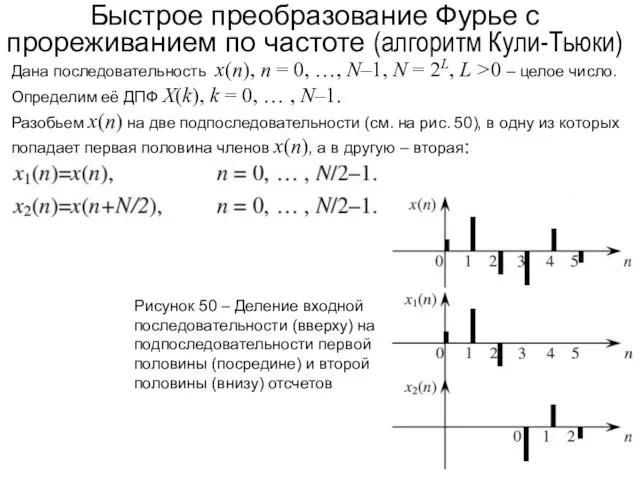
Быстрое преобразование Фурье с прореживанием во времени (алгоритм Кули-Тьюки)
Дана последовательность x(n),
Быстрое преобразование Фурье с прореживанием во времени (алгоритм Кули-Тьюки)
Дана последовательность x(n),
Быстрое преобразование Фурье с прореживанием во времени
Определим ДПФ от x(n):
Выполнение преобразования:
и
Быстрое преобразование Фурье с прореживанием во времени
Определим ДПФ от x(n):
Выполнение преобразования:
и
Быстрое преобразование Фурье с прореживанием во времени
X(k) определено для k =
Быстрое преобразование Фурье с прореживанием во времени
X(k) определено для k =

Быстрое преобразование Фурье с прореживанием во времени
Конечные результаты ДПФ попарно образуются
Быстрое преобразование Фурье с прореживанием во времени
Конечные результаты ДПФ попарно образуются
Быстрое преобразование Фурье с прореживанием во времени
Дальнейшего ускорения вычислений можно достичь,
Быстрое преобразование Фурье с прореживанием во времени
Дальнейшего ускорения вычислений можно достичь,
Быстрое преобразование Фурье с прореживанием во времени
2-этап. Теперь последовательности x1(n) и
Быстрое преобразование Фурье с прореживанием во времени
2-этап. Теперь последовательности x1(n) и
Быстрое преобразование Фурье с прореживанием во времени
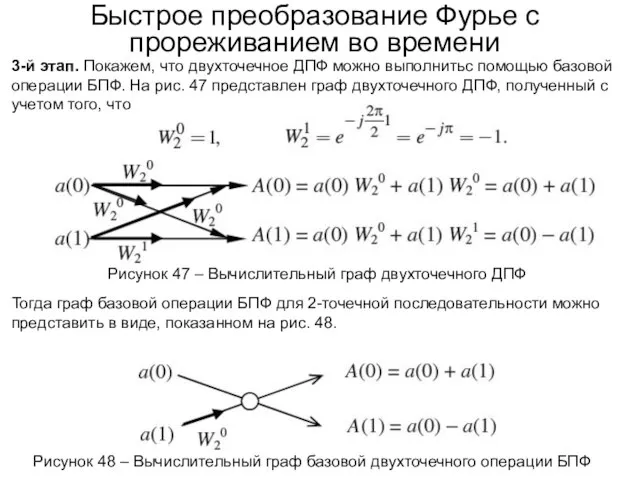
3-й этап. Покажем, что двухточечное
Быстрое преобразование Фурье с прореживанием во времени
3-й этап. Покажем, что двухточечное
Быстрое преобразование Фурье с прореживанием во времени
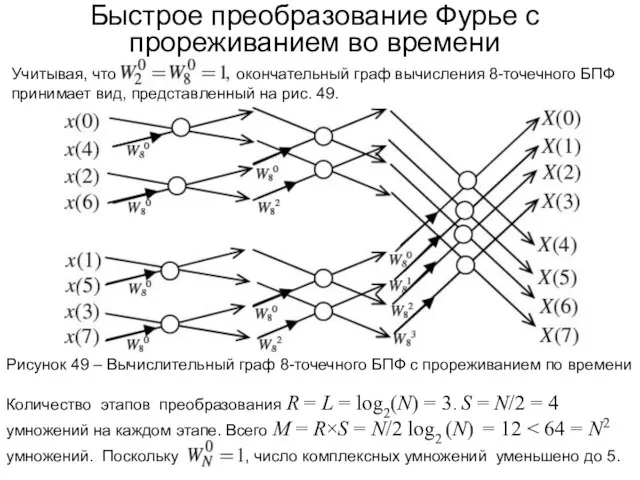
Рисунок 49 – Вычислительный граф
Быстрое преобразование Фурье с прореживанием во времени
Рисунок 49 – Вычислительный граф
Быстрое преобразование Фурье с прореживанием по частоте (алгоритм Кули-Тьюки)
Дана последовательность x(n),
Быстрое преобразование Фурье с прореживанием по частоте (алгоритм Кули-Тьюки)
Дана последовательность x(n),
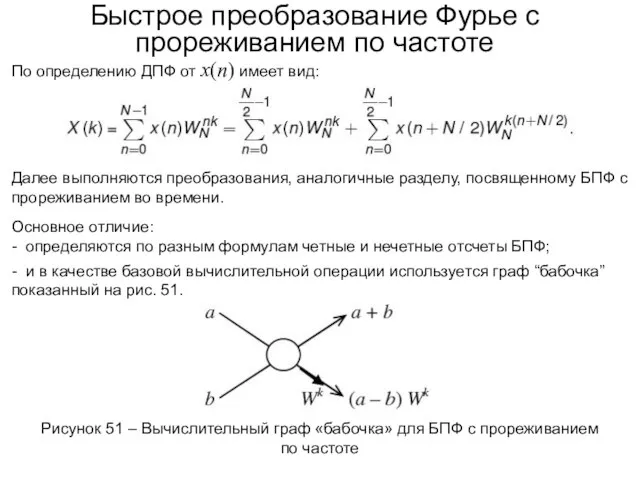
Быстрое преобразование Фурье с прореживанием по частоте
По определению ДПФ от x(n)
Быстрое преобразование Фурье с прореживанием по частоте
По определению ДПФ от x(n)

Быстрое преобразование Фурье с прореживанием по частоте
Рисунок 52 – Вычислительный граф
Быстрое преобразование Фурье с прореживанием по частоте
Рисунок 52 – Вычислительный граф
Быстрое преобразование Фурье (БПФ)
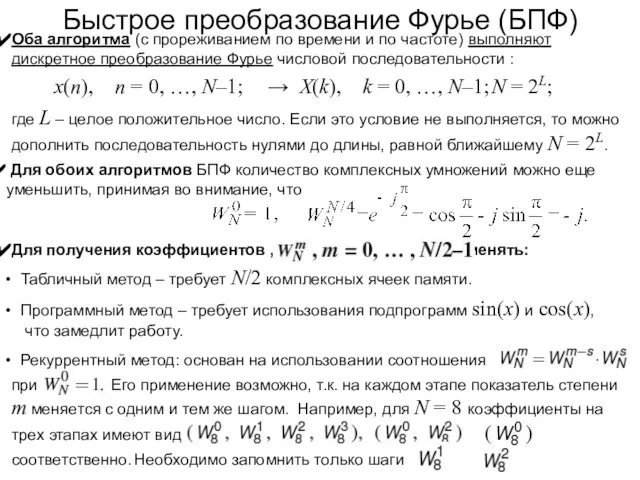
Для обоих алгоритмов БПФ количество комплексных умножений
Быстрое преобразование Фурье (БПФ)
Для обоих алгоритмов БПФ количество комплексных умножений
Быстрое преобразование Фурье (БПФ)
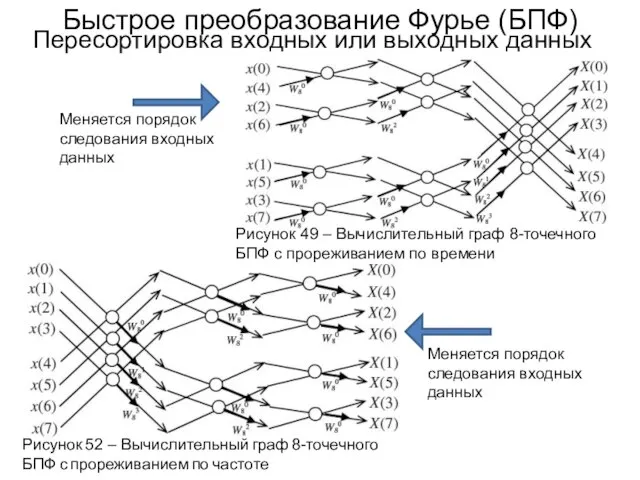
Пересортировка входных или выходных данных
Рисунок 52 – Вычислительный
Быстрое преобразование Фурье (БПФ)
Пересортировка входных или выходных данных
Рисунок 52 – Вычислительный
Быстрое преобразование Фурье (БПФ)
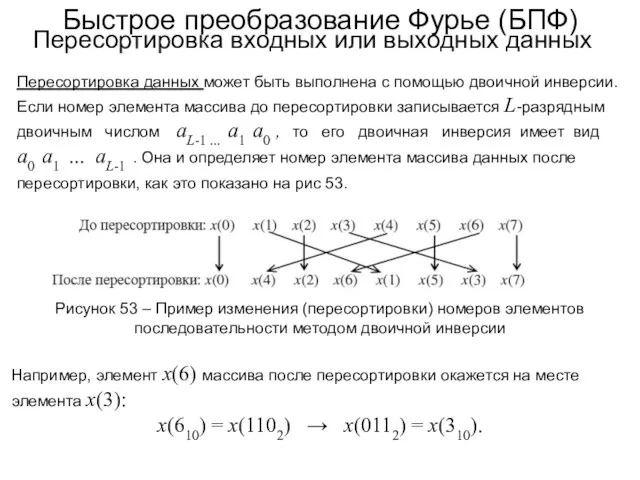
Пересортировка входных или выходных данных
Пересортировка данных может быть
Быстрое преобразование Фурье (БПФ)
Пересортировка входных или выходных данных
Пересортировка данных может быть

Единый подход к алгоритмам БПФ
При вычислении БПФ мы считали длину преобразуемой
Единый подход к алгоритмам БПФ
При вычислении БПФ мы считали длину преобразуемой
Единый подход к алгоритмам БПФ
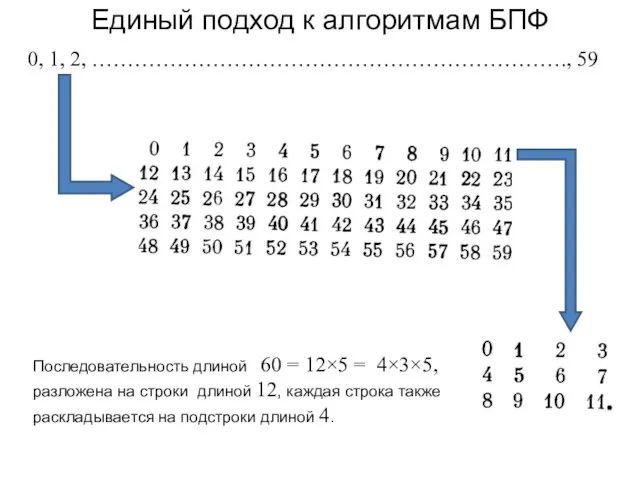
0, 1, 2, …………………………………………………………., 59
Последовательность длиной 60
Единый подход к алгоритмам БПФ
0, 1, 2, …………………………………………………………., 59
Последовательность длиной 60
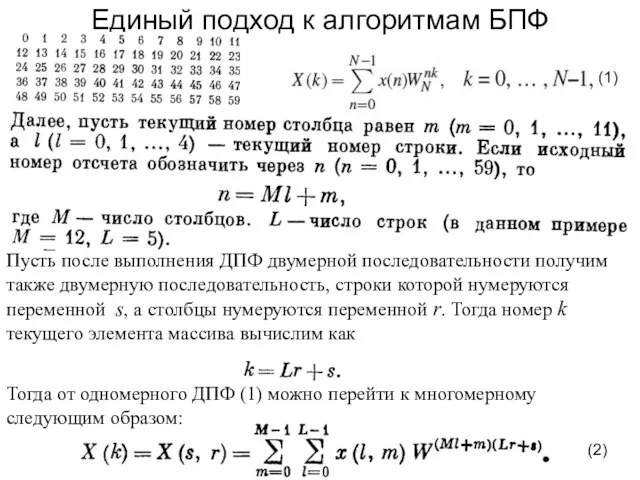
Единый подход к алгоритмам БПФ
Пусть после выполнения ДПФ двумерной последовательности получим
Единый подход к алгоритмам БПФ
Пусть после выполнения ДПФ двумерной последовательности получим
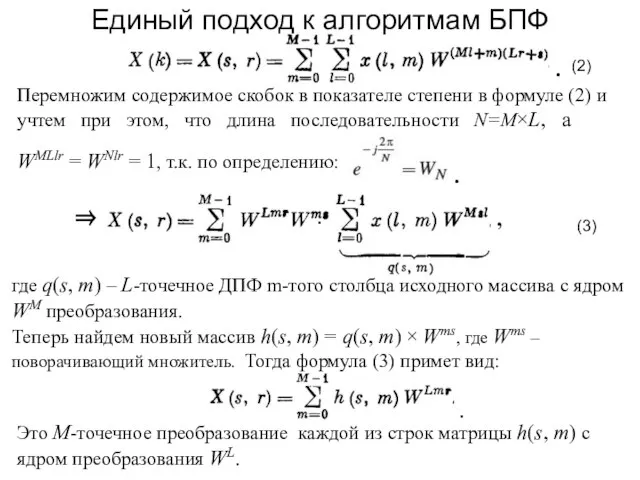
Единый подход к алгоритмам БПФ
Перемножим содержимое скобок в показателе степени в
Единый подход к алгоритмам БПФ
Перемножим содержимое скобок в показателе степени в
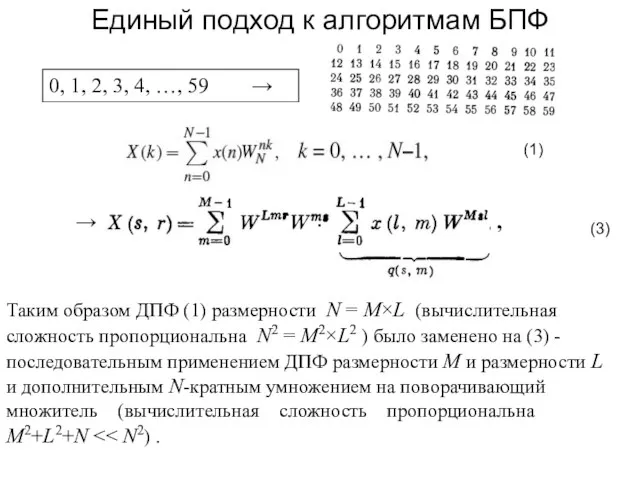
Таким образом ДПФ (1) размерности N = М×L (вычислительная сложность пропорциональна
Таким образом ДПФ (1) размерности N = М×L (вычислительная сложность пропорциональна
Единый подход к алгоритмам БПФ
.
(3)
.
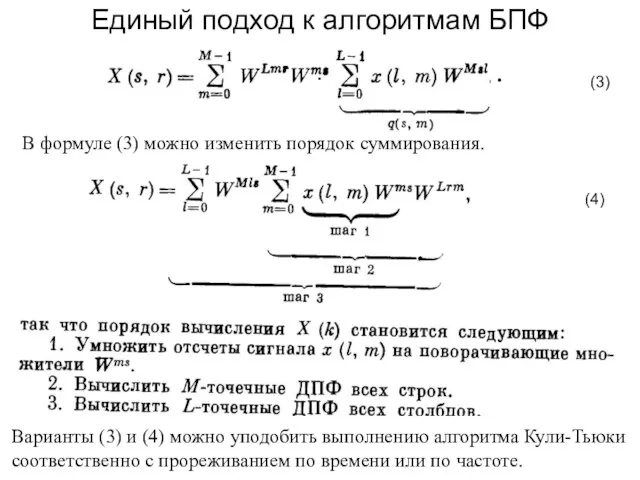
В формуле (3) можно изменить порядок
Единый подход к алгоритмам БПФ
.
(3)
.
В формуле (3) можно изменить порядок
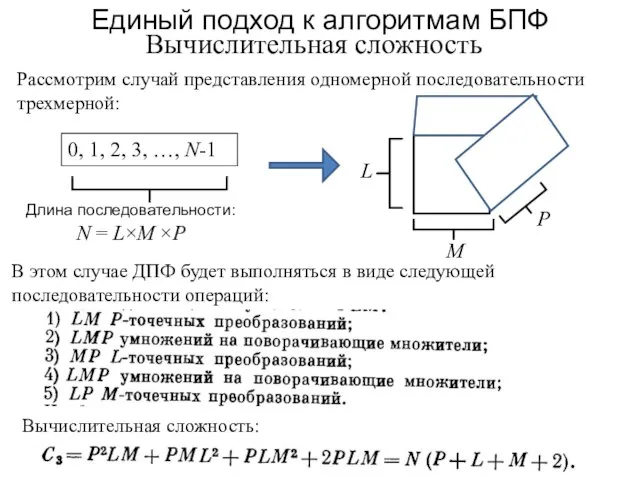
Единый подход к алгоритмам БПФ
Вычислительная сложность
0, 1, 2, 3, …, N-1
Длина
Единый подход к алгоритмам БПФ
Вычислительная сложность
0, 1, 2, 3, …, N-1
Длина
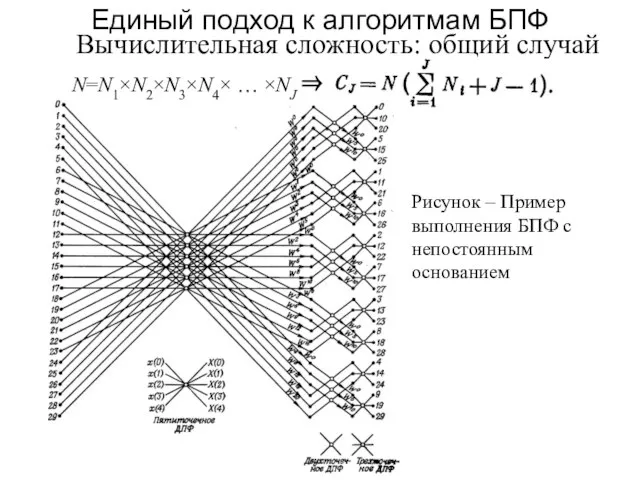
Единый подход к алгоритмам БПФ
Вычислительная сложность: общий случай
N=N1×N2×N3×N4× … ×NJ ⇒
Рисунок
Единый подход к алгоритмам БПФ
Вычислительная сложность: общий случай
N=N1×N2×N3×N4× … ×NJ ⇒
Рисунок

Быстрая круговая свертка
Обозначим через xp(n) и hp(n) дискретные периодические последовательности
Быстрая круговая свертка
Обозначим через xp(n) и hp(n) дискретные периодические последовательности
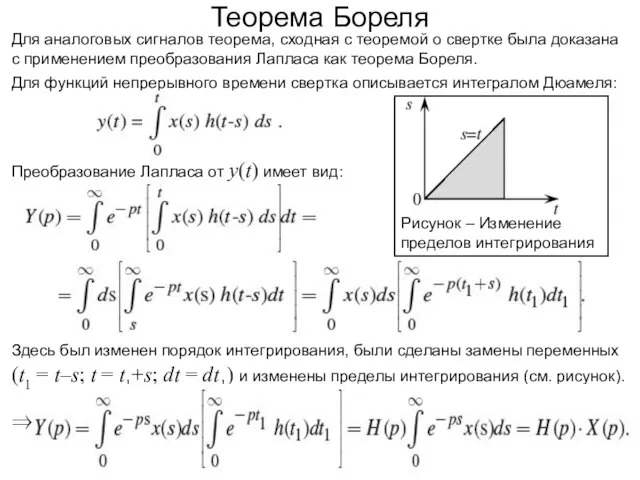
Теорема Бореля
Для аналоговых сигналов теорема, сходная с теоремой о свертке была
Теорема Бореля
Для аналоговых сигналов теорема, сходная с теоремой о свертке была
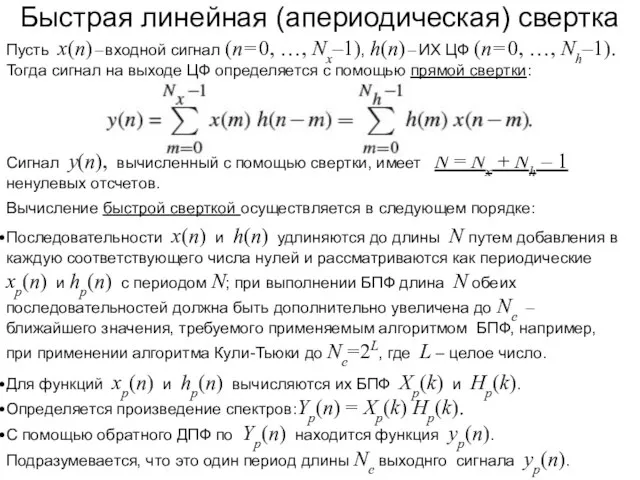
Быстрая линейная (апериодическая) свертка
Пусть x(n) – входной сигнал (n = 0,
Быстрая линейная (апериодическая) свертка
Пусть x(n) – входной сигнал (n = 0,
Плюсы и минусы быстрой свертки
При вычислении быстрой линейной свертки операндов
Плюсы и минусы быстрой свертки
При вычислении быстрой линейной свертки операндов
Секционированная свертка
n
n
n
n
n
n
n
x3(m)
x2(m)
x1(m)
x0(m)
ĥ(m)
x(m)
h(m)
N
2N
2N
2N
2N
2N
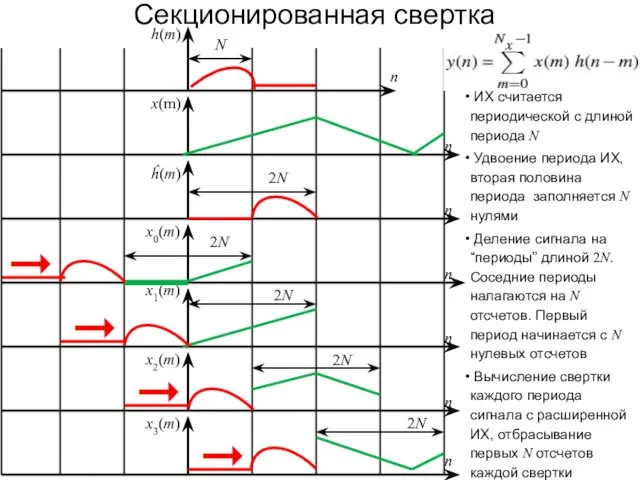
ИХ считается периодической с длиной периода N
Удвоение периода
Секционированная свертка
n
n
n
n
n
n
n
x3(m)
x2(m)
x1(m)
x0(m)
ĥ(m)
x(m)
h(m)
N
2N
2N
2N
2N
2N
ИХ считается периодической с длиной периода N
Удвоение периода

Ошибки квантования
Ошибки квантования

Источники и форма проявления ошибок квантования
Квантование – это процесс представления чисел
Источники и форма проявления ошибок квантования
Квантование – это процесс представления чисел
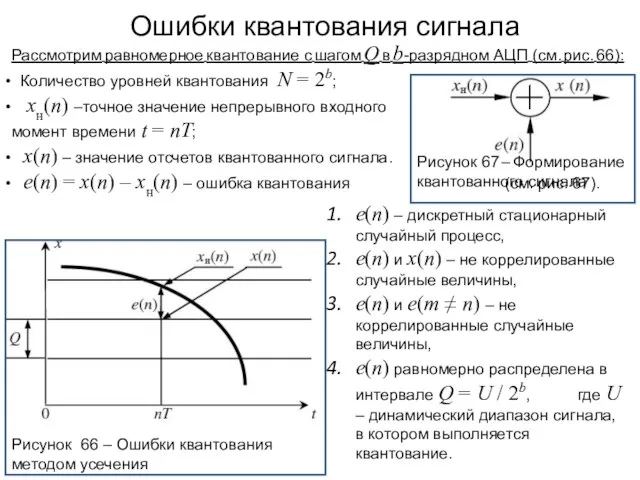
Ошибки квантования сигнала
Рисунок 66 – Ошибки квантования методом усечения
Рассмотрим равномерное квантование
Ошибки квантования сигнала
Рисунок 66 – Ошибки квантования методом усечения
Рассмотрим равномерное квантование

Ошибки квантования сигнала методом усечения
Рисунок 68 – Квантование методом усечения:
Рисунок 67
Ошибки квантования сигнала методом усечения
Рисунок 68 – Квантование методом усечения:
Рисунок 67

Ошибки квантования сигнала методом округления
Рисунок 69 – Квантование методом округления
Кm =
Ошибки квантования сигнала методом округления
Рисунок 69 – Квантование методом округления
Кm =
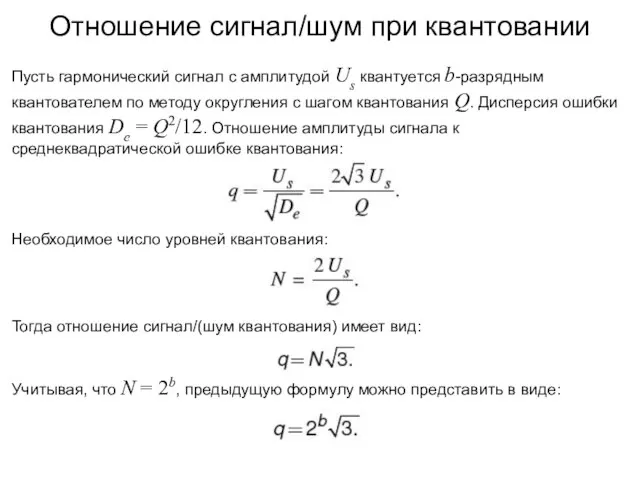
Отношение сигнал/шум при квантовании
Пусть гармонический сигнал с амплитудой Us квантуется b-разрядным
Отношение сигнал/шум при квантовании
Пусть гармонический сигнал с амплитудой Us квантуется b-разрядным

Шумы квантования, приведенные к выходу ЦФ
Пусть квантованный сигнал на выходе ЦФ
Шумы квантования, приведенные к выходу ЦФ
Пусть квантованный сигнал на выходе ЦФ
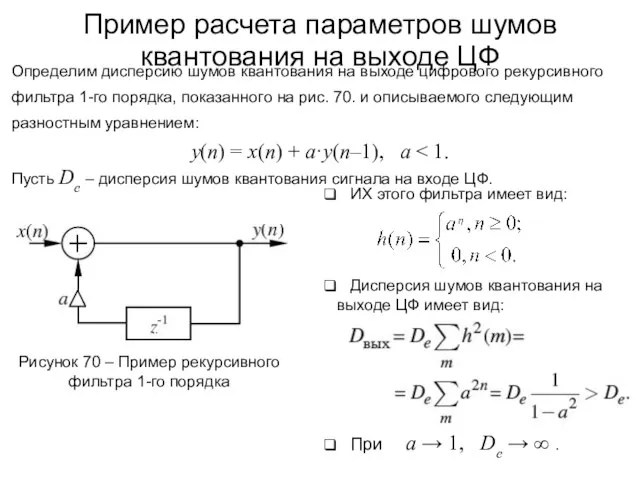
Пример расчета параметров шумов квантования на выходе ЦФ
Определим дисперсию шумов квантования
Пример расчета параметров шумов квантования на выходе ЦФ
Определим дисперсию шумов квантования
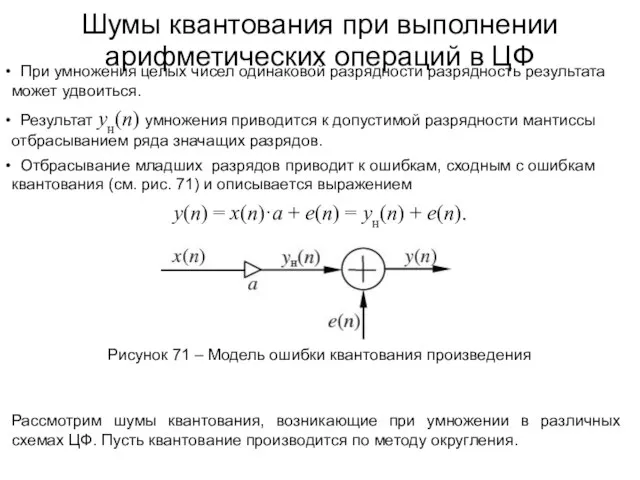
Шумы квантования при выполнении арифметических операций в ЦФ
Рисунок 71 – Модель
Шумы квантования при выполнении арифметических операций в ЦФ
Рисунок 71 – Модель
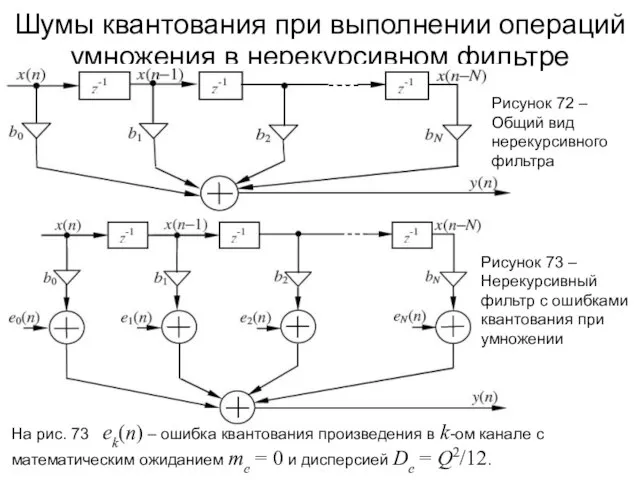
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 72 –
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 72 –
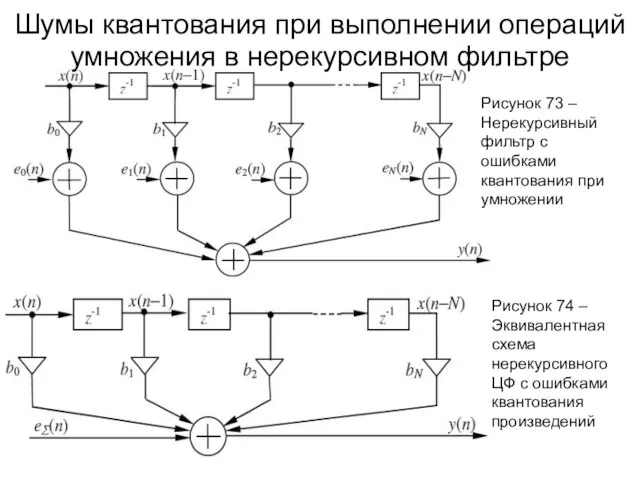
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 73 –
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 73 –
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 74 –
Шумы квантования при выполнении операций умножения в нерекурсивном фильтре
Рисунок 74 –
Шумы квантования при выполнении операций умножения в рекурсивном фильтре
Рисунок 75 –
Шумы квантования при выполнении операций умножения в рекурсивном фильтре
Рисунок 75 –

Шумы квантования результатов умножения в рекурсивном ЦФ
– сумма ошибок в
Шумы квантования результатов умножения в рекурсивном ЦФ
– сумма ошибок в
Шумы квантования при выполнении дискретного преобразования Фурье
Прямое ДПФ описывается формулой
Граф алгоритма
Шумы квантования при выполнении дискретного преобразования Фурье
Прямое ДПФ описывается формулой
Граф алгоритма
Шумы квантования при выполнении дискретного преобразования Фурье
Поскольку W – комплексный сомножитель,
Шумы квантования при выполнении дискретного преобразования Фурье
Поскольку W – комплексный сомножитель,
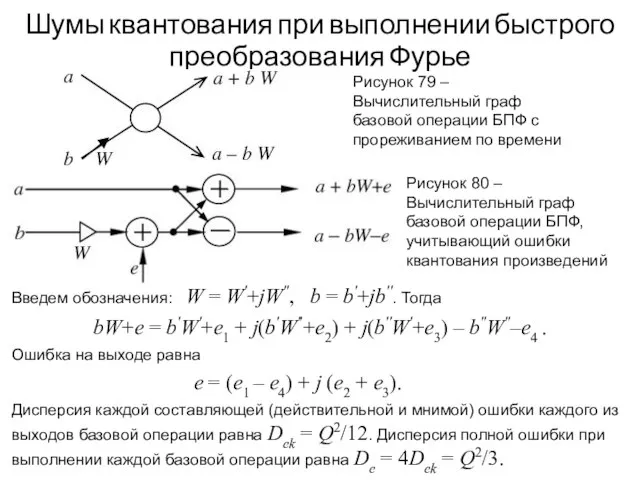
Шумы квантования при выполнении быстрого преобразования Фурье
Рисунок 79 – Вычислительный граф
Шумы квантования при выполнении быстрого преобразования Фурье
Рисунок 79 – Вычислительный граф
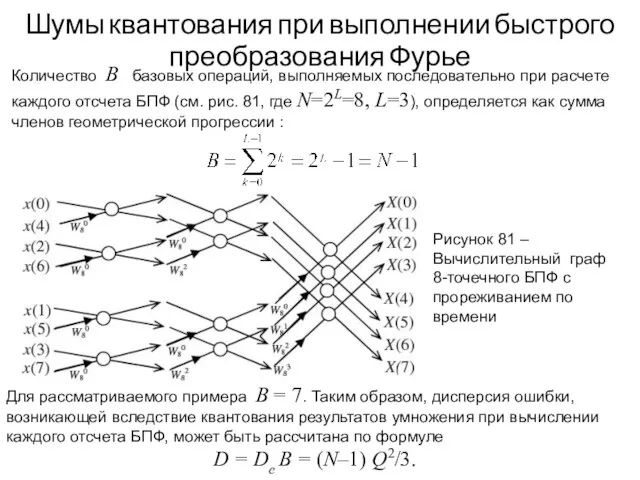
Шумы квантования при выполнении быстрого преобразования Фурье
Рисунок 81 – Вычислительный граф
Шумы квантования при выполнении быстрого преобразования Фурье
Рисунок 81 – Вычислительный граф
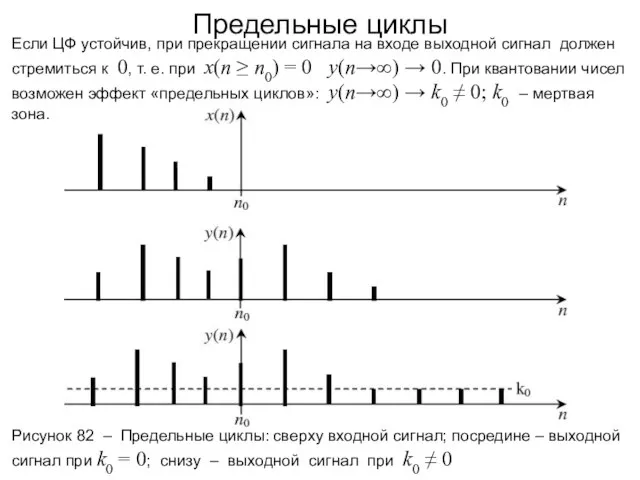
Предельные циклы
Рисунок 82 – Предельные циклы: сверху входной сигнал; посредине –
Предельные циклы
Рисунок 82 – Предельные циклы: сверху входной сигнал; посредине –

Предельные циклы
Рассмотрим пример рекурсивного фильтра 1-го порядка, описываемого разностным уравнением
Предельные циклы
Рассмотрим пример рекурсивного фильтра 1-го порядка, описываемого разностным уравнением
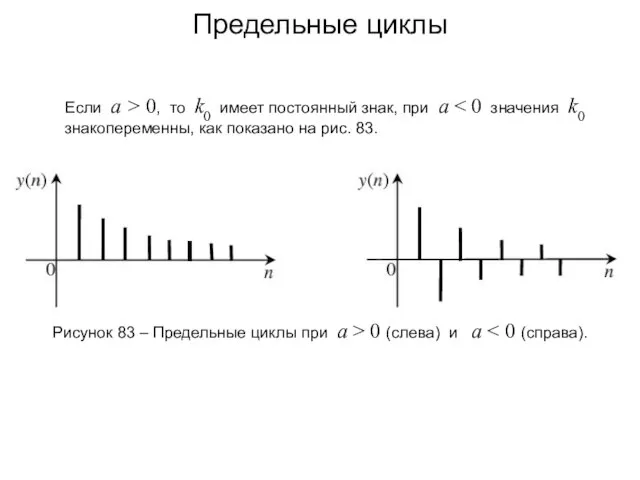
Предельные циклы
Если а > 0, то k0 имеет постоянный знак, при
Предельные циклы
Если а > 0, то k0 имеет постоянный знак, при
Неравномерное квантование
Рисунок 84 – Неравномерное квантование сигнала: справа – аналоговый сигнал
Неравномерное квантование
Рисунок 84 – Неравномерное квантование сигнала: справа – аналоговый сигнал
Неравномерное квантование
В телефонии наиболее вероятны малые значения речевого сигнала, поэтому
равномерное
Неравномерное квантование
В телефонии наиболее вероятны малые значения речевого сигнала, поэтому
равномерное

Спектральный анализ
В контексте цифровой обработки сигналов с помощью спектрального анализа будем
Спектральный анализ
В контексте цифровой обработки сигналов с помощью спектрального анализа будем
Введем следующие обозначения для спектров сигналов:
Xн(jω) – спектр непрерывного сигнала
Введем следующие обозначения для спектров сигналов:
Xн(jω) – спектр непрерывного сигнала
Спектральный анализ
Будем анализировать амплитудные спектры |X(kΩ)| в диапазоне k = k1,
Спектральный анализ
Будем анализировать амплитудные спектры |X(kΩ)| в диапазоне k = k1,
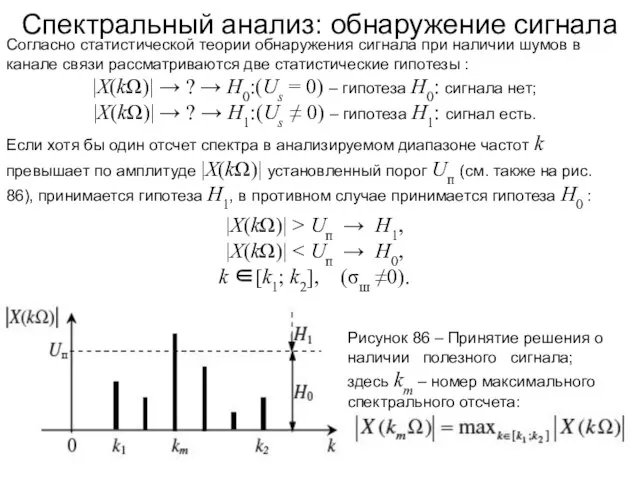
Спектральный анализ: обнаружение сигнала
Согласно статистической теории обнаружения сигнала при наличии шумов
Спектральный анализ: обнаружение сигнала
Согласно статистической теории обнаружения сигнала при наличии шумов
Спектральный анализ: обнаружение сигнала
Статистическими характеристиками обнаружителя являются:
вероятность F ложной тревоги
Спектральный анализ: обнаружение сигнала
Статистическими характеристиками обнаружителя являются:
вероятность F ложной тревоги
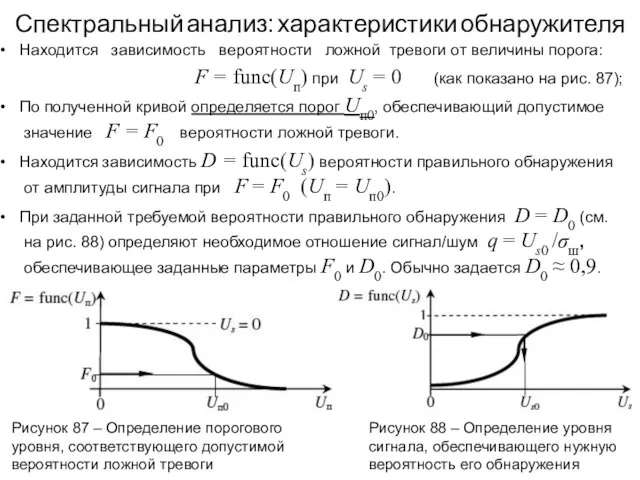
Спектральный анализ: характеристики обнаружителя
Находится зависимость вероятности ложной тревоги от величины
Спектральный анализ: характеристики обнаружителя
Находится зависимость вероятности ложной тревоги от величины
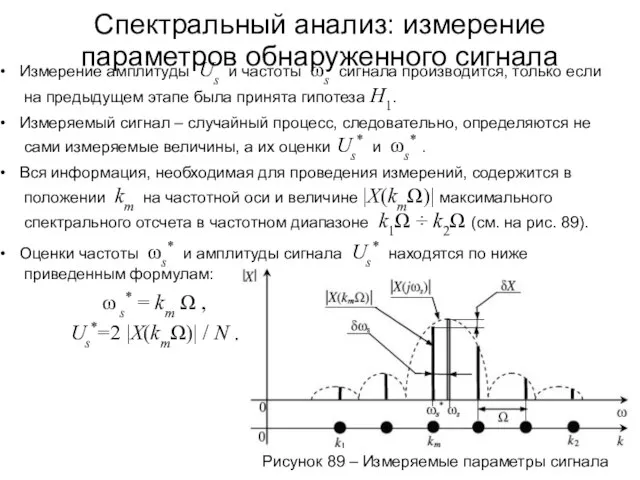
Спектральный анализ: измерение параметров обнаруженного сигнала
Измерение амплитуды Us и частоты
Спектральный анализ: измерение параметров обнаруженного сигнала
Измерение амплитуды Us и частоты
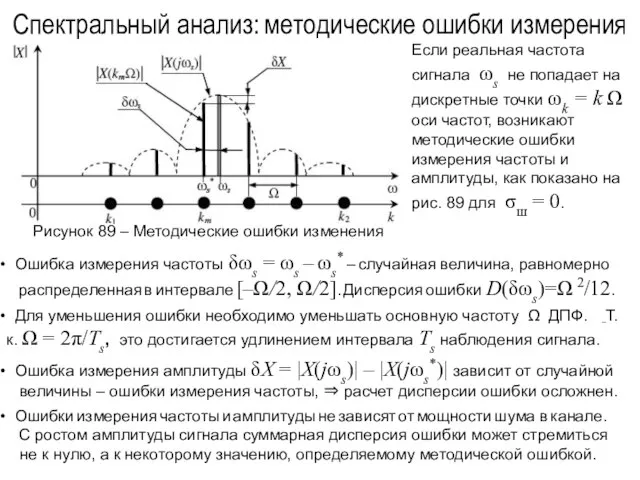
Ошибка измерения частоты δωs = ωs – ωs* – случайная
Ошибка измерения частоты δωs = ωs – ωs* – случайная
Расчет статистических характеристик обнаружения сигнала и измерения его параметров
Для расчета статистических
Расчет статистических характеристик обнаружения сигнала и измерения его параметров
Для расчета статистических
Расчет статистических характеристик обнаружения сигнала и измерения его параметров
Для каждого i-того
Расчет статистических характеристик обнаружения сигнала и измерения его параметров
Для каждого i-того
Двумерные унитарные преобразования
Двумерные унитарные преобразования
Двумерные унитарные преобразования
Двумерные унитарные преобразования используются для работы с двумерными массивами
Двумерные унитарные преобразования
Двумерные унитарные преобразования используются для работы с двумерными массивами

Двумерные унитарные преобразования
В результате прямого унитарного преобразования матрица изображения F(n1,n2) размерами
Двумерные унитарные преобразования
В результате прямого унитарного преобразования матрица изображения F(n1,n2) размерами

Двумерные унитарные преобразования
Результат выполнения оператора разделимого двумерного унитарного преобразования можно находить
Двумерные унитарные преобразования
Результат выполнения оператора разделимого двумерного унитарного преобразования можно находить
Преобразование Фурье изображения
Прямое и обратное разделимые унитарные преобразования двумерных матриц
Заменяем
Преобразование Фурье изображения
Прямое и обратное разделимые унитарные преобразования двумерных матриц
Заменяем
Преобразование Фурье изображения
Рисунок – Частный вид ядра двумерного преобразования Фурье для
Преобразование Фурье изображения
Рисунок – Частный вид ядра двумерного преобразования Фурье для

Преобразование Фурье изображения
Представим по формулам Эйлера комплексные экспоненты в виде сумм
Преобразование Фурье изображения
Представим по формулам Эйлера комплексные экспоненты в виде сумм

Преобразование Фурье изображения
Подставив u=u+mN и v=v+nN, где m и n –
Преобразование Фурье изображения
Подставив u=u+mN и v=v+nN, где m и n –
Можно показать, что
,
т.е. расчет значительной части спектра избыточен и некоторые
Можно показать, что
,
т.е. расчет значительной части спектра избыточен и некоторые
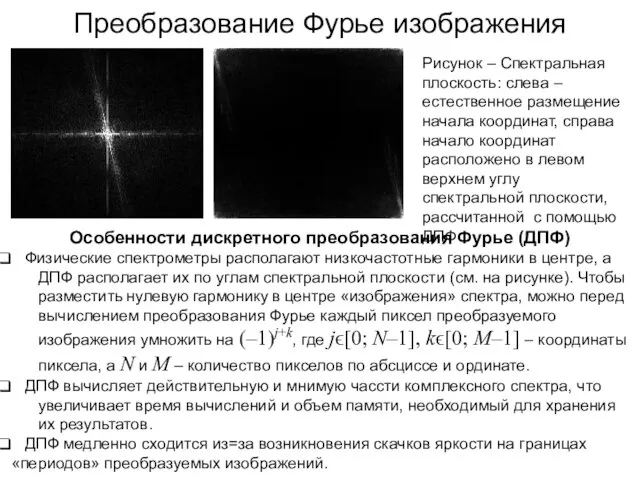
Особенности дискретного преобразования Фурье (ДПФ)
Физические спектрометры располагают низкочастотные гармоники в
Особенности дискретного преобразования Фурье (ДПФ)
Физические спектрометры располагают низкочастотные гармоники в
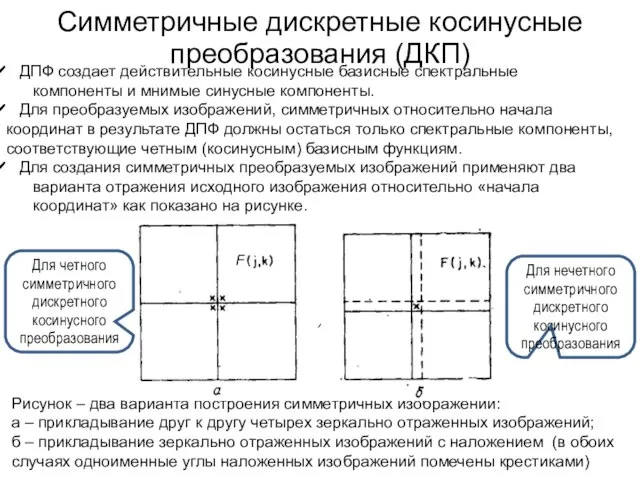
Симметричные дискретные косинусные преобразования (ДКП)
ДПФ создает действительные косинусные базисные спектральные
Симметричные дискретные косинусные преобразования (ДКП)
ДПФ создает действительные косинусные базисные спектральные

Симметричное четное ДКП
Рисунок – Формирование изображения для четного ДКП
где в F
Симметричное четное ДКП
Рисунок – Формирование изображения для четного ДКП
где в F
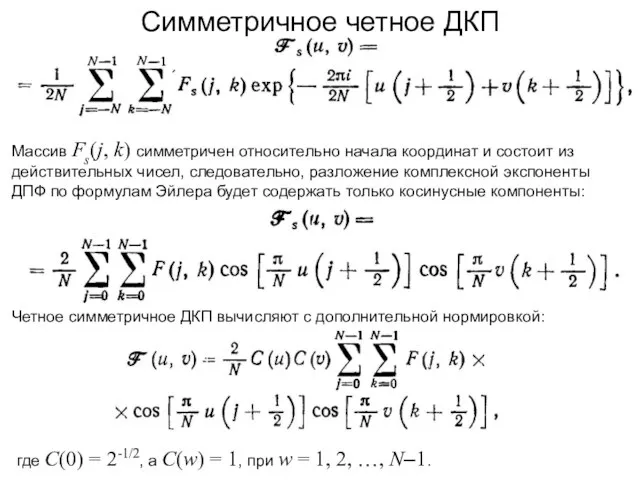
Симметричное четное ДКП
Массив Fs(j, k) симметричен относительно начала координат и состоит
Симметричное четное ДКП
Массив Fs(j, k) симметричен относительно начала координат и состоит

Симметричное четное ДКП
Обратное четное симметричное ДКП вычисляют с теми же значениями
Симметричное четное ДКП
Обратное четное симметричное ДКП вычисляют с теми же значениями
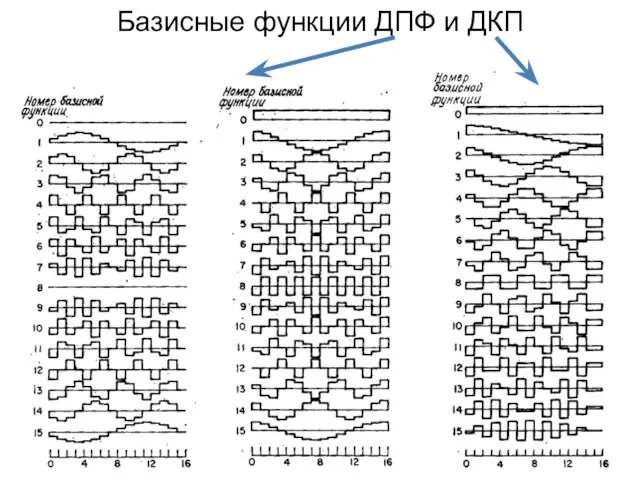
Базисные функции ДПФ и ДКП
Базисные функции ДПФ и ДКП
Сходимость унитарных преобразований
Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности
Сходимость унитарных преобразований
Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности
Симметричное нечетное ДКП
Рисунок – Формирование изображения для нечетного ДКП
В соответствии с
Симметричное нечетное ДКП
Рисунок – Формирование изображения для нечетного ДКП
В соответствии с

Симметричное нечетное ДКП
Поскольку преобразование Фурье обладает свойством симметрии относительно комплексного сопряжения,
Симметричное нечетное ДКП
Поскольку преобразование Фурье обладает свойством симметрии относительно комплексного сопряжения,

Симметричное нечетное ДКП
Чтобы базисные функции нечетного симметричного ДКП стали ортонормированными, вычисление
Симметричное нечетное ДКП
Чтобы базисные функции нечетного симметричного ДКП стали ортонормированными, вычисление
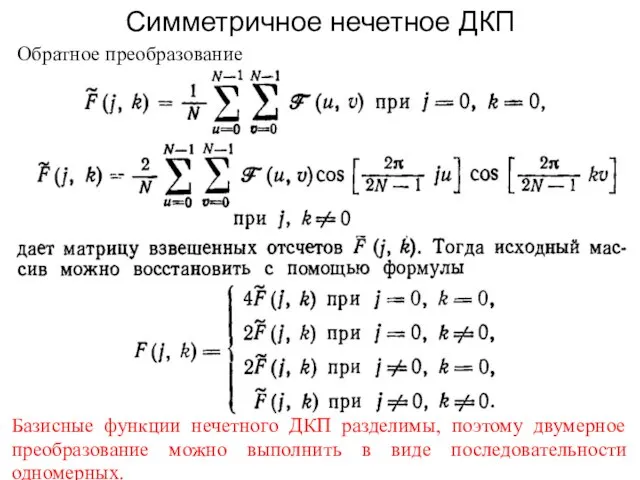
Симметричное нечетное ДКП
Обратное преобразование
Базисные функции нечетного ДКП разделимы, поэтому двумерное преобразование
Симметричное нечетное ДКП
Обратное преобразование
Базисные функции нечетного ДКП разделимы, поэтому двумерное преобразование

Дискретное синусное преобразование
где j=0, …, N–1 – номера строк пикселов, а
Дискретное синусное преобразование
где j=0, …, N–1 – номера строк пикселов, а

Дискретное синусное преобразование
Рисунок – Базисные функции дискретного синусного преобразования для последовательности
Дискретное синусное преобразование
Рисунок – Базисные функции дискретного синусного преобразования для последовательности

Преобразование Карунена-Лоэва
C – ковариационная матрица
E – математическое ожидание
xk – k-тый компонент
Преобразование Карунена-Лоэва
C – ковариационная матрица
E – математическое ожидание
xk – k-тый компонент
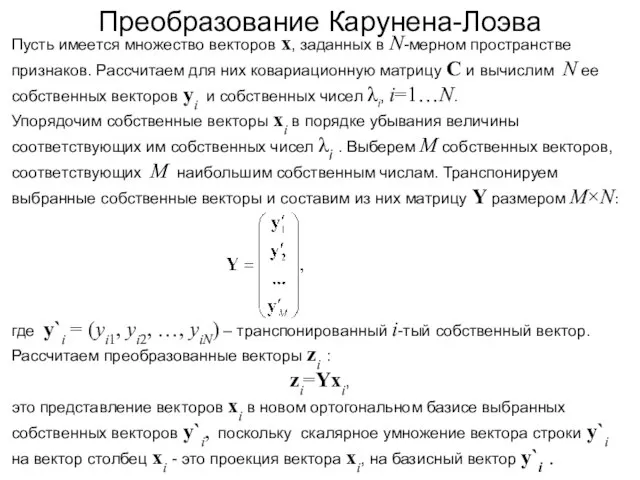
Преобразование Карунена-Лоэва
Пусть имеется множество векторов x, заданных в N-мерном пространстве признаков.
Преобразование Карунена-Лоэва
Пусть имеется множество векторов x, заданных в N-мерном пространстве признаков.

Дискретное синусное преобразование
Преобразование Карунена-Лоэва «поворачивает» исходный базис {x1, x2, …, xN}
Дискретное синусное преобразование
Преобразование Карунена-Лоэва «поворачивает» исходный базис {x1, x2, …, xN}
Преобразование Карунена-Лоэва
Рисунок – Базисные функции преобразования Карунена-Лоэва для последовательности длиной 16
Преобразование Карунена-Лоэва
Рисунок – Базисные функции преобразования Карунена-Лоэва для последовательности длиной 16
Разложение по негармоническим функциям
Разложение по негармоническим функциям

Импульсы блока
Рисунок – Последовательность из 8 импульсов блока
Импульсы блока
просты
Импульсы блока
Рисунок – Последовательность из 8 импульсов блока
Импульсы блока
просты
Функции Уолша
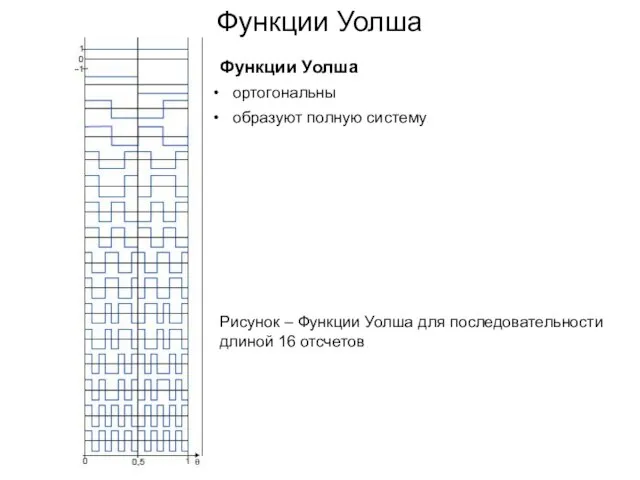
Рисунок – Функции Уолша для последовательности длиной 16 отсчетов
Функции Уолша
Функции Уолша
Рисунок – Функции Уолша для последовательности длиной 16 отсчетов
Функции Уолша
Преобразование Адамара
Преобразование Адамара (Hadamard) выполняется умножением вектора f отсчетов сигнала на
Преобразование Адамара
Преобразование Адамара (Hadamard) выполняется умножением вектора f отсчетов сигнала на
Двумерное преобразование Адамара
Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное
Двумерное преобразование Адамара
Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное
Двумерное преобразование Адамара
Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное
Двумерное преобразование Адамара
Для расчета двумерного преобразования Адамара можно сначала выполнить одномерное

Преобразование Хаара
Рисунок – Базисные функции преобразования Хаара для последовательности длиной 16
Преобразование Хаара
Рисунок – Базисные функции преобразования Хаара для последовательности длиной 16
Двумерное преобразование Хаара
Для расчета двумерного преобразования Хаара F можно сначала выполнить
Двумерное преобразование Хаара
Для расчета двумерного преобразования Хаара F можно сначала выполнить

Наклонное преобразование (slant transform)
Рисунок – Базисные функции наклонного преобразования для последовательности
Наклонное преобразование (slant transform)
Рисунок – Базисные функции наклонного преобразования для последовательности
Сходимость унитарных преобразований
Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности
Сходимость унитарных преобразований
Рисунок – Дисперсии амплитуд базисных функций унитарных преобразований последовательности
Сингулярное преобразование
Сингулярное преобразование
Симметричное нечетное ДКП
Симметричное нечетное ДКП

Симметричное нечетное ДКП
Симметричное нечетное ДКП
Симметричное нечетное ДКП
Симметричное нечетное ДКП

Симметричное нечетное ДКП
Симметричное нечетное ДКП
Симметричное нечетное ДКП
Симметричное нечетное ДКП
 Знакомьтесь, наш новый сотрудник
Знакомьтесь, наш новый сотрудник 20131110_prezentatsiya22
20131110_prezentatsiya22 Литье в песчаные формы
Литье в песчаные формы Система зажигания
Система зажигания Архитектор
Архитектор Modern mobile phones addiction: reasons and consequences
Modern mobile phones addiction: reasons and consequences Исследовательская работа. Роботы в нашей жизни
Исследовательская работа. Роботы в нашей жизни Наша история любви
Наша история любви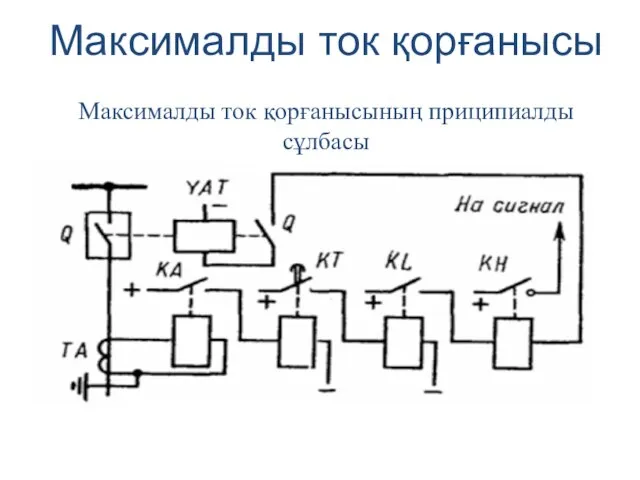 Максималды ток қорғанысы
Максималды ток қорғанысы Православные праздники
Православные праздники Экспресс-доставка грузов по России
Экспресс-доставка грузов по России Учителя первых классов на 2015-2016 учебный год
Учителя первых классов на 2015-2016 учебный год Дорожная карта
Дорожная карта Опасная ловушка
Опасная ловушка Взвейтесь кострами
Взвейтесь кострами Технологическая документация для изготовления изделий на станках
Технологическая документация для изготовления изделий на станках ЗиОБЖ_Режим питания. Ужин. Обобщение
ЗиОБЖ_Режим питания. Ужин. Обобщение Red Hot Chili Peppers
Red Hot Chili Peppers Рекомендации по подбору индивидуального стиля
Рекомендации по подбору индивидуального стиля Параллельное соединение элементов в цепи синусоидального тока
Параллельное соединение элементов в цепи синусоидального тока Македония - 2015
Македония - 2015 Моя школа вчера, сегодня, завтра
Моя школа вчера, сегодня, завтра Металургія сталі. Виробництво сталі в мартенівських печах
Металургія сталі. Виробництво сталі в мартенівських печах Основы литейного производства
Основы литейного производства Сюжетно-ролевая игра Путешествие на самолете группа Звездочка
Сюжетно-ролевая игра Путешествие на самолете группа Звездочка 20120427_urok_muzyki_3_klass
20120427_urok_muzyki_3_klass Поиск по картинке вариант 3 (3)_0_1649428572
Поиск по картинке вариант 3 (3)_0_1649428572 Упрощение выражений (подготовка к к/р)
Упрощение выражений (подготовка к к/р)