- Алгоритмы удаления невидимых линий и поверхностей

Содержание
- 2. Основная идея – сортировка по глубине Алгоритмы объектного пространства: за основу берется система мировых координат. Алгоритмы
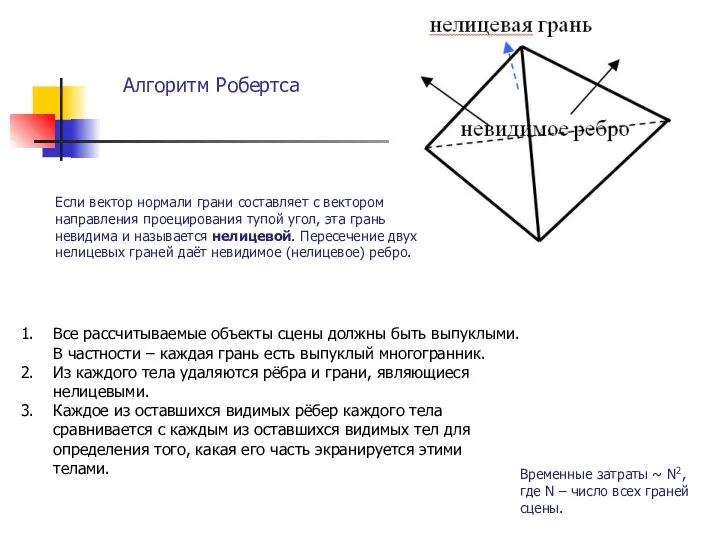
- 3. Алгоритм Робертса Все рассчитываемые объекты сцены должны быть выпуклыми. В частности – каждая грань есть выпуклый
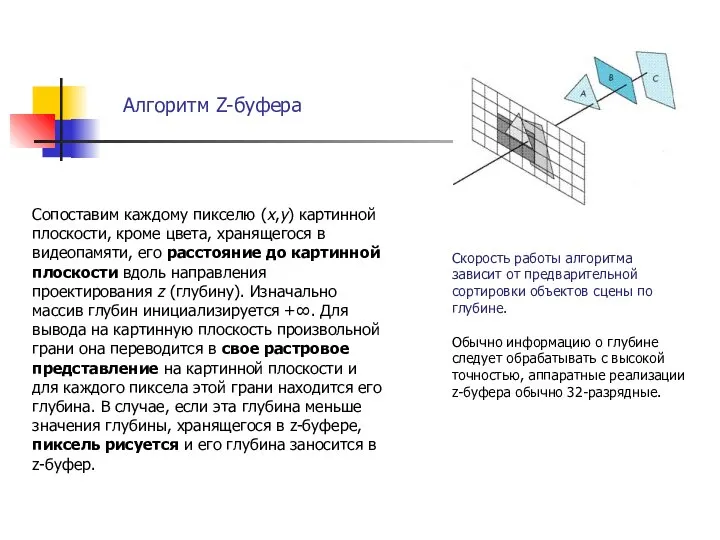
- 4. Алгоритм Z-буфера Сопоставим каждому пикселю (х,у) картинной плоскости, кроме цвета, хранящегося в видеопамяти, его расстояние до
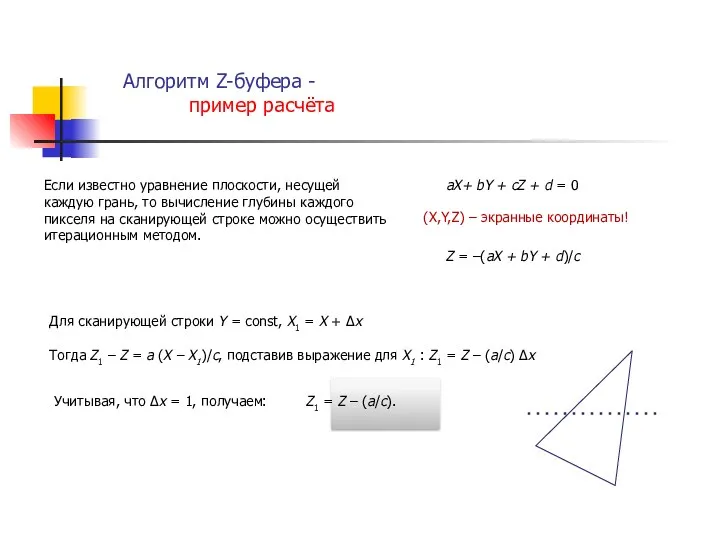
- 5. Алгоритм Z-буфера - пример расчёта Если известно уравнение плоскости, несущей каждую грань, то вычисление глубины каждого
- 6. Алгоритмы упорядочения Алгоритм Варнока (Warnock) В пространстве изображения рассматривается окно и решается вопрос о том, пусто
- 7. Компьютерная графика Лекция 5 (2) Принципы создания реалистичных изображений
- 8. Модели трассировки лучей: прямая трассировка Рассчитываются пути лучей света, идущие от источников до объектов сцены. Если
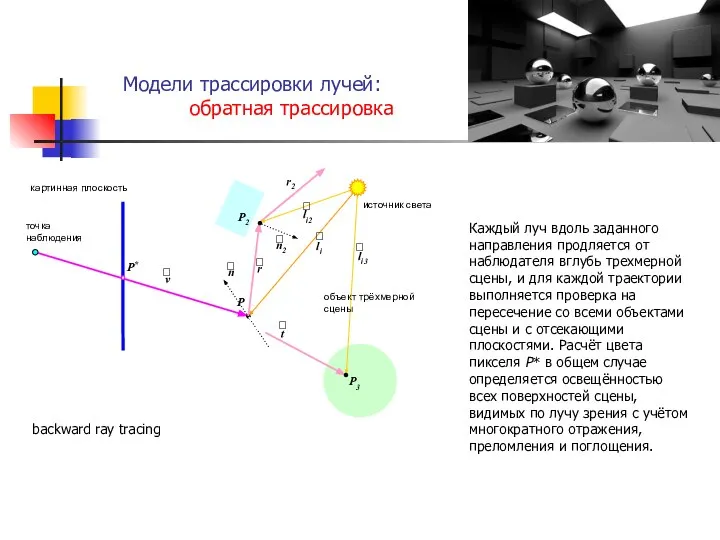
- 9. Модели трассировки лучей: обратная трассировка backward ray tracing Каждый луч вдоль заданного направления продляется от наблюдателя
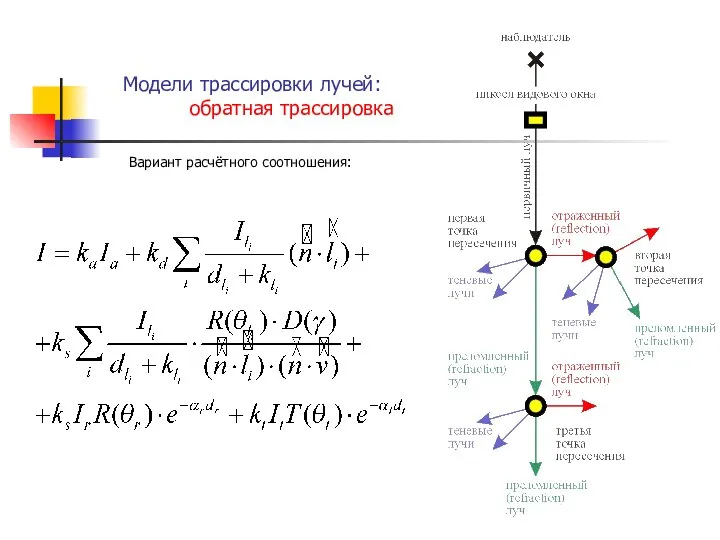
- 10. Модели трассировки лучей: обратная трассировка Вариант расчётного соотношения:
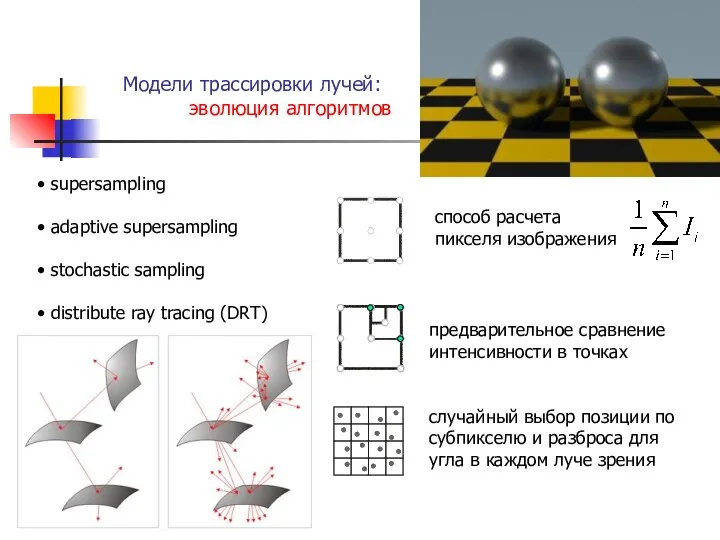
- 11. Модели трассировки лучей: эволюция алгоритмов supersampling adaptive supersampling stochastic sampling distribute ray tracing (DRT) способ расчета
- 12. Модели трассировки лучей: DRT DRT позволяет просчитывать такие эффекты, как: gloss (или scattered reflectance – размытые
- 13. Модель расчета освещенности: метод излучательности Radiosity
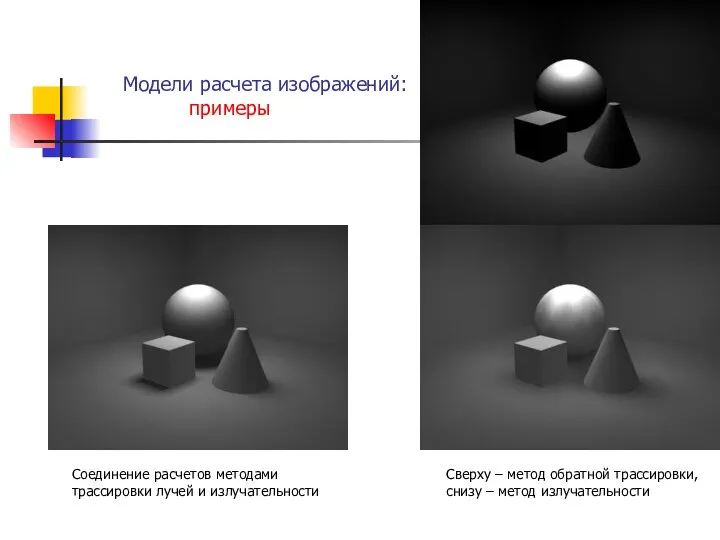
- 14. Модели расчета изображений: примеры Сверху – метод обратной трассировки, снизу – метод излучательности Соединение расчетов методами
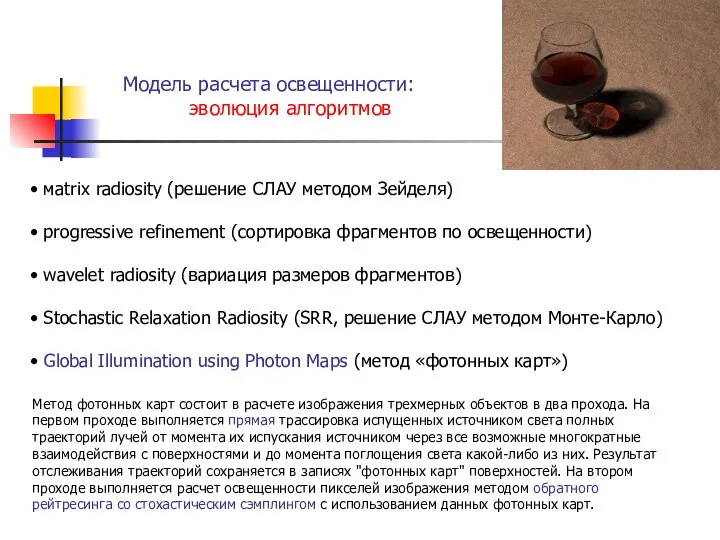
- 15. Модель расчета освещенности: эволюция алгоритмов мatrix radiosity (решение СЛАУ методом Зейделя) progressive refinement (сортировка фрагментов по
- 17. Скачать презентацию

Основная идея –
сортировка по глубине
Алгоритмы объектного пространства: за основу берется
Основная идея –
сортировка по глубине
Алгоритмы объектного пространства: за основу берется
Алгоритм Робертса
Все рассчитываемые объекты сцены должны быть выпуклыми. В частности –
Алгоритм Робертса
Все рассчитываемые объекты сцены должны быть выпуклыми. В частности –
Алгоритм Z-буфера
Сопоставим каждому пикселю (х,у) картинной плоскости, кроме цвета, хранящегося в
Алгоритм Z-буфера
Сопоставим каждому пикселю (х,у) картинной плоскости, кроме цвета, хранящегося в
Алгоритм Z-буфера -
пример расчёта
Если известно уравнение плоскости, несущей каждую грань, то
Алгоритм Z-буфера -
пример расчёта
Если известно уравнение плоскости, несущей каждую грань, то

Алгоритмы упорядочения
Алгоритм Варнока (Warnock)
В пространстве изображения рассматривается окно и решается вопрос
Алгоритмы упорядочения
Алгоритм Варнока (Warnock)
В пространстве изображения рассматривается окно и решается вопрос
Компьютерная
графика
Лекция 5 (2)
Принципы создания
реалистичных
изображений
Компьютерная
графика
Лекция 5 (2)
Принципы создания
реалистичных
изображений

Модели трассировки лучей:
прямая трассировка
Рассчитываются пути лучей света, идущие от источников до
Модели трассировки лучей:
прямая трассировка
Рассчитываются пути лучей света, идущие от источников до
Модели трассировки лучей:
обратная трассировка
backward ray tracing
Каждый луч вдоль заданного направления
Модели трассировки лучей:
обратная трассировка
backward ray tracing
Каждый луч вдоль заданного направления
Модели трассировки лучей:
обратная трассировка
Вариант расчётного соотношения:
Модели трассировки лучей:
обратная трассировка
Вариант расчётного соотношения:
Модели трассировки лучей:
эволюция алгоритмов
supersampling
adaptive supersampling
stochastic sampling
distribute ray
Модели трассировки лучей:
эволюция алгоритмов
supersampling
adaptive supersampling
stochastic sampling
distribute ray

Модели трассировки лучей:
DRT
DRT позволяет просчитывать такие эффекты, как:
gloss (или scattered reflectance
Модели трассировки лучей:
DRT
DRT позволяет просчитывать такие эффекты, как:
gloss (или scattered reflectance

Модель расчета освещенности:
метод излучательности
Radiosity
Модель расчета освещенности:
метод излучательности
Radiosity
Модели расчета изображений:
примеры
Сверху – метод обратной трассировки, снизу – метод излучательности
Соединение
Модели расчета изображений:
примеры
Сверху – метод обратной трассировки, снизу – метод излучательности
Соединение
Модель расчета освещенности:
эволюция алгоритмов
мatrix radiosity (решение СЛАУ методом Зейделя)
Модель расчета освещенности:
эволюция алгоритмов
мatrix radiosity (решение СЛАУ методом Зейделя)
 Обзор языка SQL.ppt
Обзор языка SQL.ppt Сведения о бетоне
Сведения о бетоне Оценка качества зданий. Показатели качества зданий. Обследование зданий
Оценка качества зданий. Показатели качества зданий. Обследование зданий Конституционное право
Конституционное право РАДИОТЕХНИЧЕСКИЕ ЦЕПИ И СИГНАЛЫ 16
РАДИОТЕХНИЧЕСКИЕ ЦЕПИ И СИГНАЛЫ 16 Гидравлический привод
Гидравлический привод Электронная торговля
Электронная торговля Критерии проведения обязательного аудита
Критерии проведения обязательного аудита Политическое сознание
Политическое сознание Решение задач с использованием оператора циклов
Решение задач с использованием оператора циклов Биржевая торговля – это прошлое или будущее человечества? Биржа в классическом понимании это: 1) место, где регулярно в одно и тож
Биржевая торговля – это прошлое или будущее человечества? Биржа в классическом понимании это: 1) место, где регулярно в одно и тож Методология исследований управления
Методология исследований управления Чековая лента
Чековая лента БЖД
БЖД Организация помощи при автодорожной травме
Организация помощи при автодорожной травме Греческий ордер
Греческий ордер Изготовление промера
Изготовление промера Информационное общество. WAN
Информационное общество. WAN Геополитическое пространство Южной Азии
Геополитическое пространство Южной Азии Глобальная спутниковая навигационная система GPS
Глобальная спутниковая навигационная система GPS Средние века и Возрождение
Средние века и Возрождение  Сторонник понятия экономического либерализма, который не допускает вмешательства правительства в экономике и принимающий свобод
Сторонник понятия экономического либерализма, который не допускает вмешательства правительства в экономике и принимающий свобод Жан Огюст Доминик Энгр - французский живописец
Жан Огюст Доминик Энгр - французский живописец Административное право
Административное право Политические партии
Политические партии Объекты и классы в PHP
Объекты и классы в PHP Становление и развитие политической науки
Становление и развитие политической науки Общие сведения. Назначение и применение JavaScript
Общие сведения. Назначение и применение JavaScript