- Автоматические системы управления курсом судна

Содержание
- 2. Структурная схема системы автоматического управления курсом судна
- 3. Kawasaki Electro-Hydraulic Steering Gears RM21-051 / RM22-051 Torque at max. working pressure: 500 kN・m Rudder turning
- 4. Гибкая конфигурация реальной системы автоматического управления курсом судна на примере АР Anschütz PilotStar D
- 5. Исследования и опыт эксплуатации, что настройку АР следует менять в случае: изменения загрузки судна; изменения скорости
- 6. Основные параметры, требующие регулировки, в авторулевом: заданный курс; управление рулем; регулировка чувствительности; компенсация колебаний курса при
- 7. ИЗБЫТОЧНАЯ И НЕДОСТАТОЧНАЯ ПОВОРАЧИВАЕМОСТЬ СУДНА ПРИ СЛИШКОМ ВЫСОКОЙ И СЛИШКОМ НИЗКОЙ ЧУВСТВИТЕЛЬНОСТИ СИСТЕМЫ Уровень чувствительности определяет,
- 9. Скачать презентацию
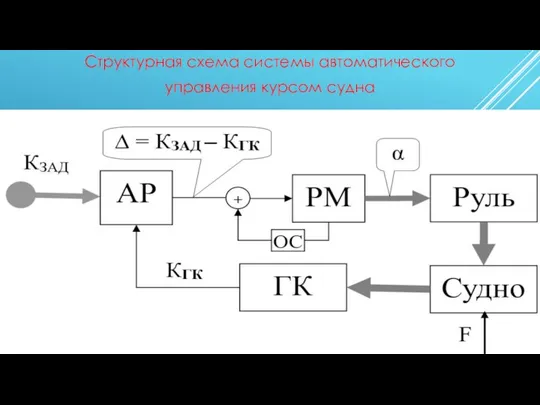
Структурная схема системы автоматического
управления курсом судна
Структурная схема системы автоматического
управления курсом судна
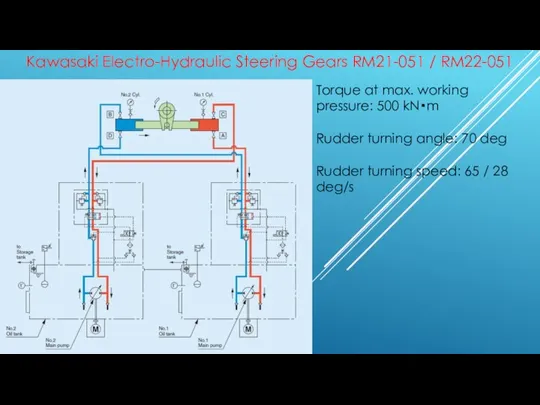
Kawasaki Electro-Hydraulic Steering Gears RM21-051 / RM22-051
Torque at max. working pressure:
Kawasaki Electro-Hydraulic Steering Gears RM21-051 / RM22-051
Torque at max. working pressure:

Гибкая конфигурация реальной системы автоматического
управления курсом судна на примере АР
Гибкая конфигурация реальной системы автоматического
управления курсом судна на примере АР
Исследования и опыт эксплуатации, что настройку АР следует менять в случае:
изменения
Исследования и опыт эксплуатации, что настройку АР следует менять в случае:
изменения
Основные параметры, требующие регулировки, в авторулевом:
заданный курс;
управление рулем;
регулировка чувствительности;
компенсация колебаний курса
Основные параметры, требующие регулировки, в авторулевом:
заданный курс;
управление рулем;
регулировка чувствительности;
компенсация колебаний курса
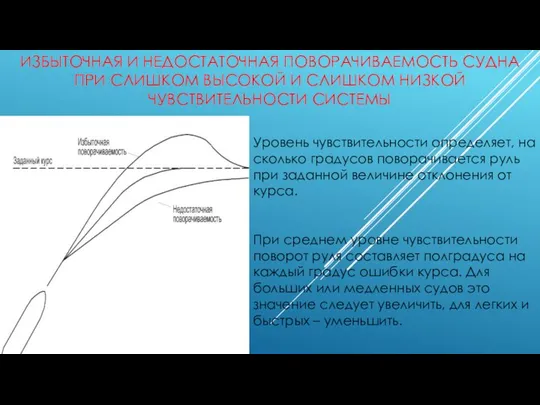
ИЗБЫТОЧНАЯ И НЕДОСТАТОЧНАЯ ПОВОРАЧИВАЕМОСТЬ СУДНА ПРИ СЛИШКОМ ВЫСОКОЙ И СЛИШКОМ НИЗКОЙ
ИЗБЫТОЧНАЯ И НЕДОСТАТОЧНАЯ ПОВОРАЧИВАЕМОСТЬ СУДНА ПРИ СЛИШКОМ ВЫСОКОЙ И СЛИШКОМ НИЗКОЙ
 Состояние и перспективы развития горнолыжного туризма в России
Состояние и перспективы развития горнолыжного туризма в России Презентация "Экономический рост России и ее интеллектуальный потенциал" - скачать презентации по Экономике
Презентация "Экономический рост России и ее интеллектуальный потенциал" - скачать презентации по Экономике кач. реакции на белки
кач. реакции на белки ЭЛЬ ГРЕКО (1541-1614)
ЭЛЬ ГРЕКО (1541-1614)  Единая автоматизированная информационная система (ЕАИС) ФТС России
Единая автоматизированная информационная система (ЕАИС) ФТС России  Особенности спортивного коллектива
Особенности спортивного коллектива Лекция 7 Уравнение множественной регрессии Теорема Гаусса-Маркова Автор: Костюнин Владимир Ильич, доцент кафедры: «Математ
Лекция 7 Уравнение множественной регрессии Теорема Гаусса-Маркова Автор: Костюнин Владимир Ильич, доцент кафедры: «Математ My idol Lionel Andrés Messi
My idol Lionel Andrés Messi Проектная работа по немецкому языку. Немецкие автомобили
Проектная работа по немецкому языку. Немецкие автомобили Великие математики
Великие математики День флага и герба Крыма
День флага и герба Крыма Методические принципы физического воспитания
Методические принципы физического воспитания  Лекция 3 Электропроводность растворов электролитов
Лекция 3 Электропроводность растворов электролитов Презентация Изучение проблемных областей государственного регулирования.
Презентация Изучение проблемных областей государственного регулирования. Коммуникационные сети
Коммуникационные сети Пламенное сердце Бориса Васильева
Пламенное сердце Бориса Васильева Электрические измерения и приборы
Электрические измерения и приборы Презентация Анализ валютного рынка России
Презентация Анализ валютного рынка России  Тема: «Вклад Фридриха Августа фон Хайека в современную экономическую науку»
Тема: «Вклад Фридриха Августа фон Хайека в современную экономическую науку»  Университетский класс: цели и задачи, организация деятельности В.Ю.Болтнев, директор школы
Университетский класс: цели и задачи, организация деятельности В.Ю.Болтнев, директор школы Аудиовизуальные и технические средства обучения. Телевизор
Аудиовизуальные и технические средства обучения. Телевизор Садово-парковое и ландшафтное строительство
Садово-парковое и ландшафтное строительство синий - презентация для начальной школы
синий - презентация для начальной школы Объекты JavaScript
Объекты JavaScript Киберспорт – это спорт
Киберспорт – это спорт Единицы длины и их соотношение - презентация для начальной школы
Единицы длины и их соотношение - презентация для начальной школы Культура движения
Культура движения Проект коттеджного дома
Проект коттеджного дома