- Кинематический анализ шарнирно-рычажных механизмов

Содержание
- 2. Основные понятия Механизмами называют изолированную часть некоторой механической системы (без источников и потребителей энергии), предназначенную для
- 3. Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с. «Вопрос о том, какие механизмы
- 4. Звенья шарнирно-рычажных механизмов Стойка – неподвижное звено механизма, на котором закреплены все другие его звенья. Кривошип
- 5. Различные варианты определения «кулисы» Кулиса – звено, вращающееся относительно подвижной оси (с направляющими для ползуна -
- 6. Варианты кулисных механизмов
- 7. Вращательное движение относительно неподвижной оси Р(a,b): Поступательное движение Sin(0)=0 Cos(0)=1 Переход от плоскопараллельного движения к вращательному
- 8. Координаты, компоненты скорости и ускорения для кривошипа Компоненты вектора ускорения О А Компоненты вектора скорости x
- 9. Координаты, компоненты скорости и ускорения для коромысла О А Компоненты вектора скорости Координаты Компоненты вектора ускорения
- 10. Координаты, компоненты скорости и ускорения для шатуна Уравнения движения в форме Лагранжа Компоненты скорости: в форме
- 11. Координаты, компоненты скорости и ускорения для ползуна Уравнения движения Компоненты вектора перемещения Компоненты вектора ускорения Компоненты
- 12. Кинематические связи в шарнирно - рычажных механизмах Кинематическими связями называют соотношения между постоянными (расстояния между осями
- 13. Кривошипно-ползунный механизм b b
- 14. Кривошипно-ползунный механизм (расчет через координаты точки А) А А b
- 15. Кривошипно-ползунный механизм. Другой вариант записи кинематических связей Н L1 L2 =const
- 16. Кривошипно-коромысловый механизм O A B L2 L1 O1 C1 C2 M L3 X Y C3 ϕ
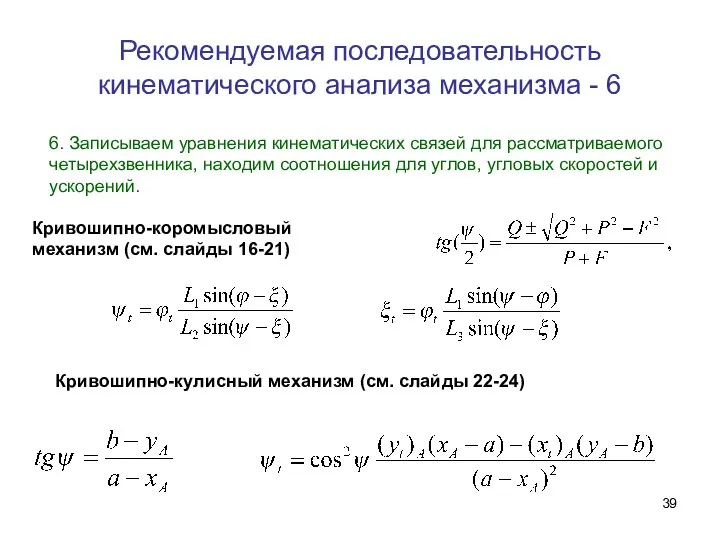
- 17. Кривошипно-коромысловый механизм ; (a)
- 18. Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла ; (a) Из системы (а) получаем 4
- 19. Соотношения между угловыми скоростями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (а) (см. сл. 16-18) по времени
- 20. Решение системы линейных уравнений по методу Крамера Исходная система и ее основной определитель «Дополнительные определители» Решение
- 21. Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (b) (см. сл. 19) по времени
- 22. Кулисный механизм. Угловые характеристики AE=
- 23. Кулисные механизмы. Направляющая с неподвижной осью
- 24. Кулисные механизмы. Направляющая с подвижной осью LТЕК
- 25. Все механизмы отличаются кинематическими связями. Число возможных вариантов механизмов и кинематических связей бесконечно.
- 26. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
- 27. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ Пусть уравнение фиксированной направляющей имеет вид (1)
- 28. УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА Уравнение прямой, вдоль которой движется ползун (1) где
- 29. F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка пересечения перпендикуляра, опущенного из
- 30. Расстояние от точки Р(хР, уР) до прямой А*х + В*у + С = 0 определяет уравнение
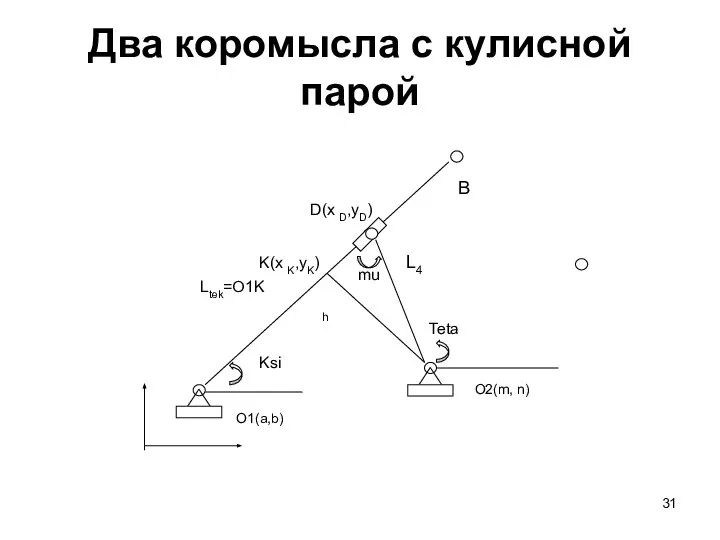
- 31. Два коромысла с кулисной парой
- 32. Два коромысла с кулисной парой - 2 D(x D,yD) K(x K,yK) O1(a,b) mu Teta Ksi L4
- 33. Два коромысла с кулисной парой - 3
- 34. Рекомендуемая последовательность кинематического анализа механизма -1 1. Выбрать (получить) кинематическую схему механизма. Преобразовать ее к общему
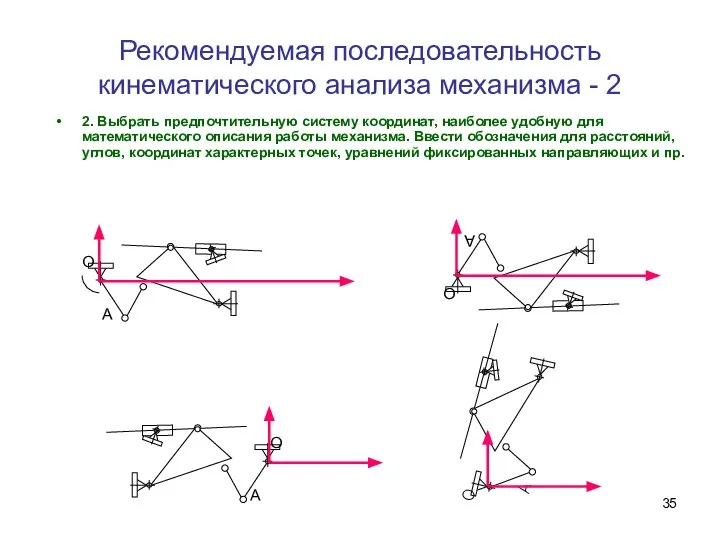
- 35. Рекомендуемая последовательность кинематического анализа механизма - 2 2. Выбрать предпочтительную систему координат, наиболее удобную для математического
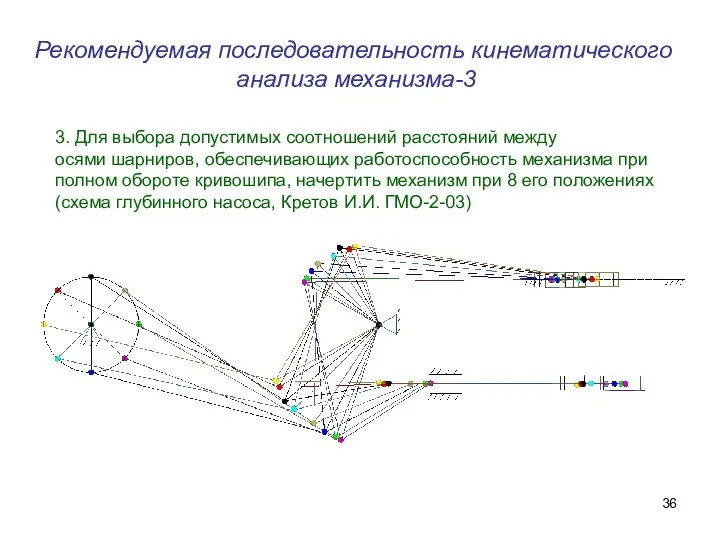
- 36. Рекомендуемая последовательность кинематического анализа механизма-3 3. Для выбора допустимых соотношений расстояний между осями шарниров, обеспечивающих работоспособность
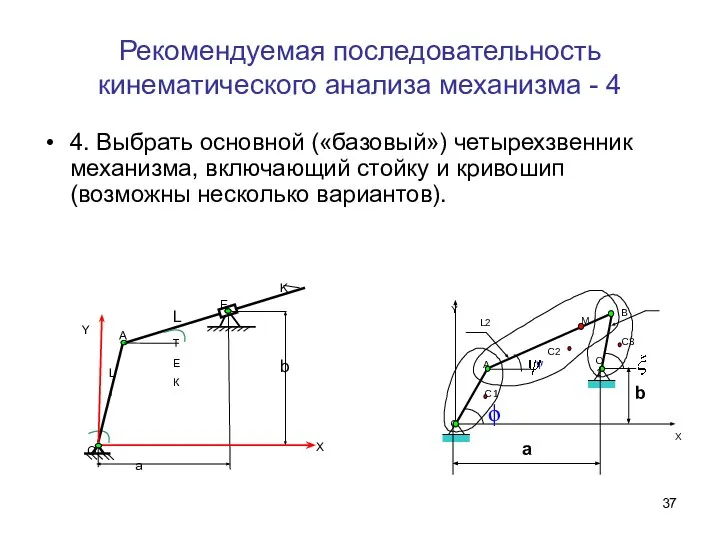
- 37. Рекомендуемая последовательность кинематического анализа механизма - 4 4. Выбрать основной («базовый») четырехзвенник механизма, включающий стойку и
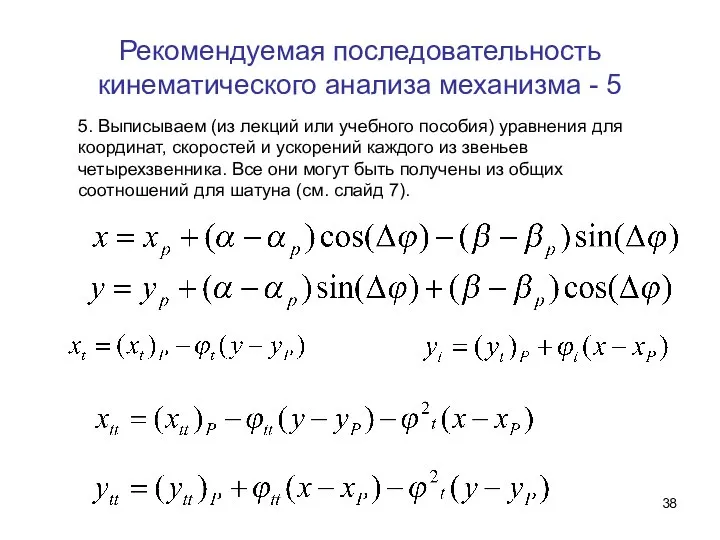
- 38. Рекомендуемая последовательность кинематического анализа механизма - 5 5. Выписываем (из лекций или учебного пособия) уравнения для
- 39. Рекомендуемая последовательность кинематического анализа механизма - 6 6. Записываем уравнения кинематических связей для рассматриваемого четырехзвенника, находим
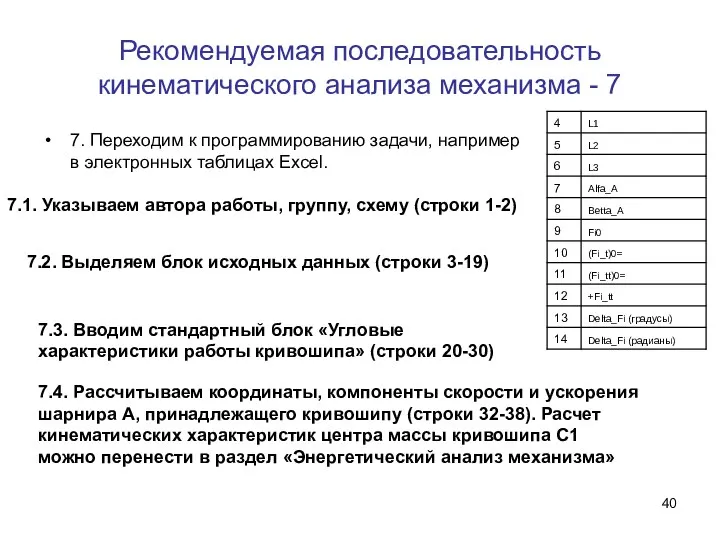
- 40. Рекомендуемая последовательность кинематического анализа механизма - 7 7. Переходим к программированию задачи, например в электронных таблицах
- 41. Рекомендуемая последовательность кинематического анализа механизма - 8 Переходим к программированию блока «Кинематические связи» 8.1. Вводим промежуточные
- 42. Рекомендуемая последовательность кинематического анализа механизма - 9 Переходим к программированию кинематических характеристик ведомых звеньев четырехзвенника 9.1.
- 43. Рекомендуемая последовательность кинематического анализа механизма - 10 Через каждые 5-8 строк программы проводим проверку результатов кинематических
- 45. Скачать презентацию
Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и
Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и
Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос
Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос
Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все
Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все
Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с
Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с
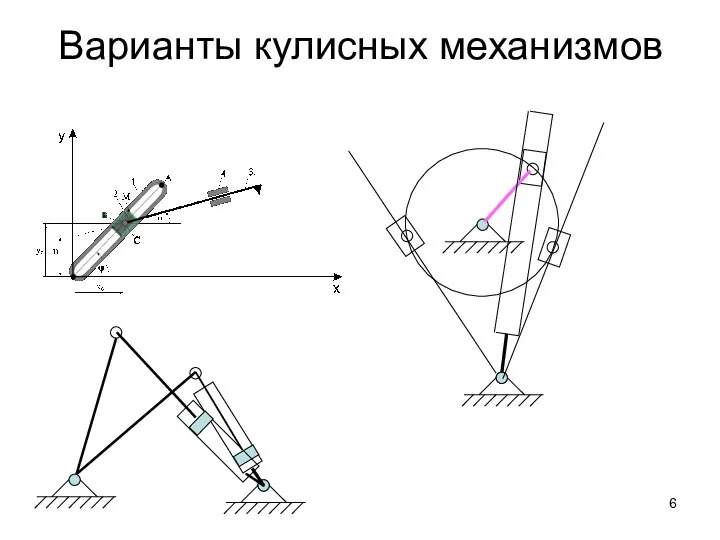
Варианты кулисных механизмов
Варианты кулисных механизмов
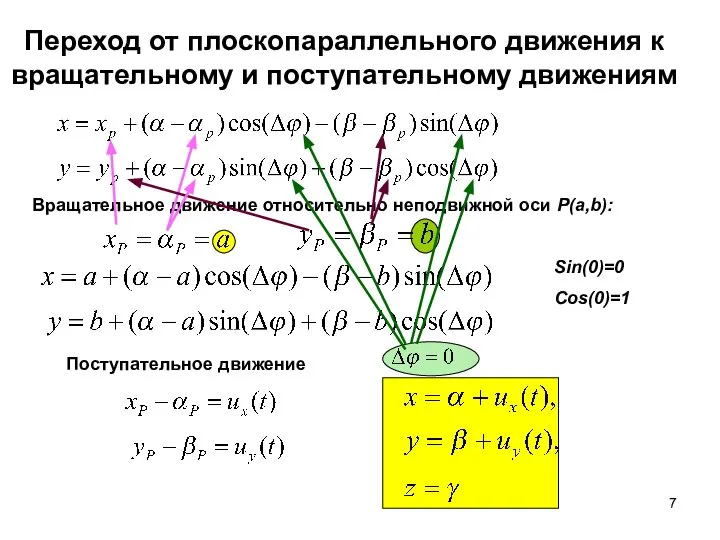
Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения
Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения
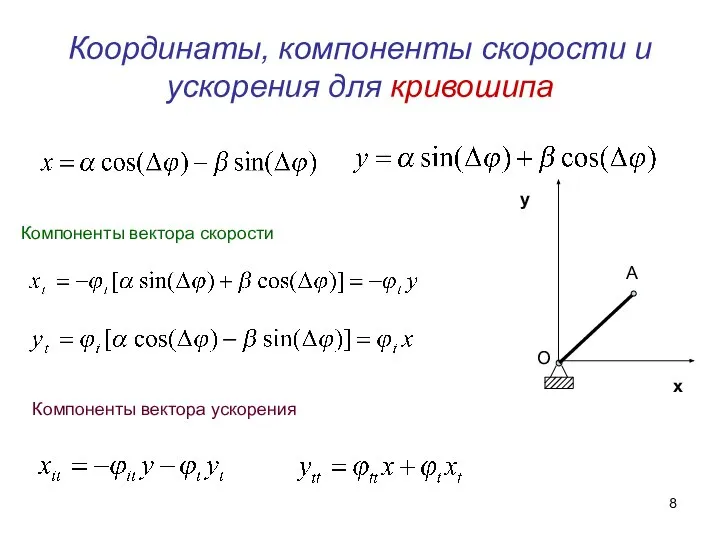
Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора
Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора
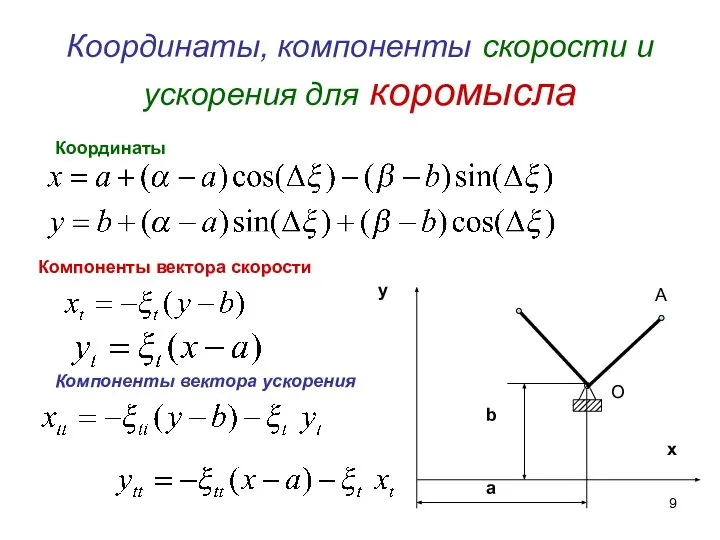
Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
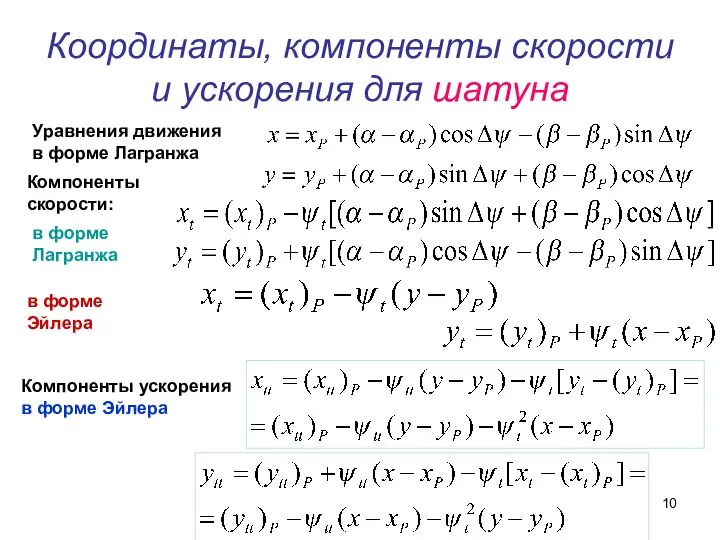
Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты
Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты
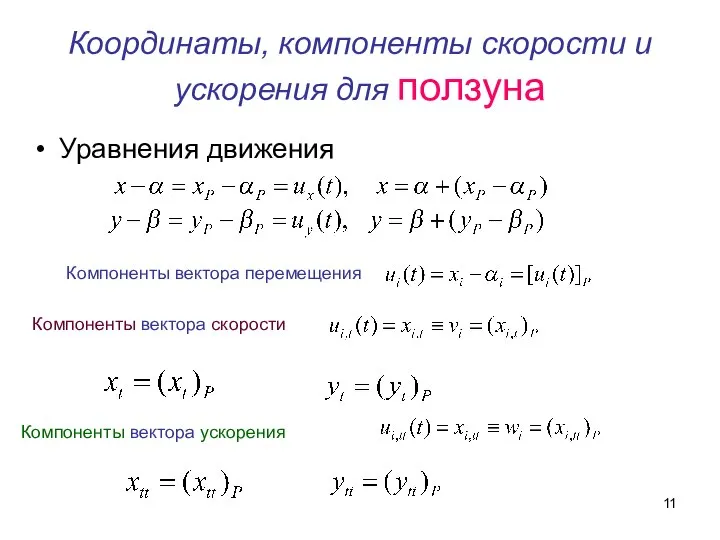
Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты
Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты
Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между
Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между
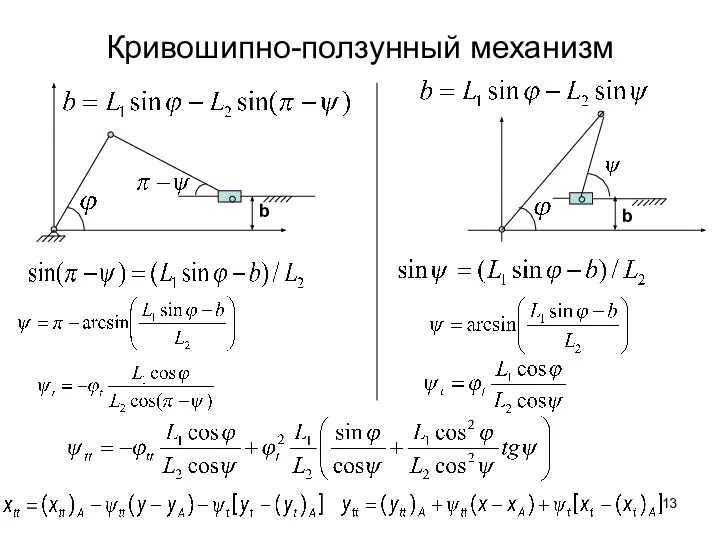
Кривошипно-ползунный механизм
b
b
Кривошипно-ползунный механизм
b
b
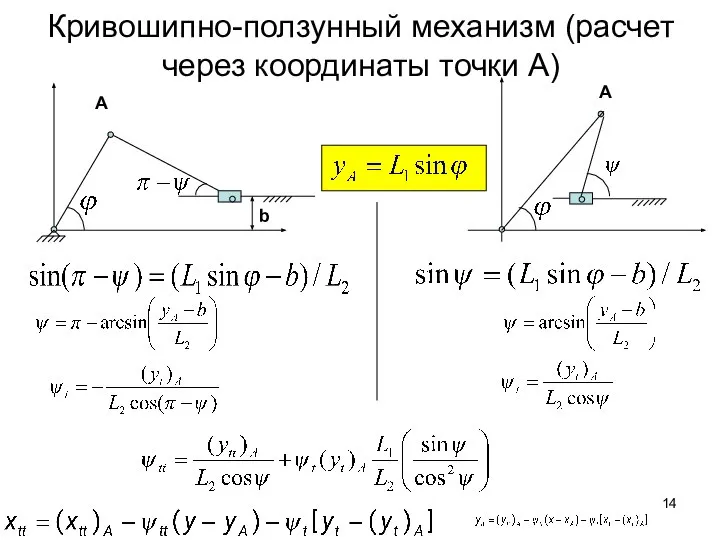
Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
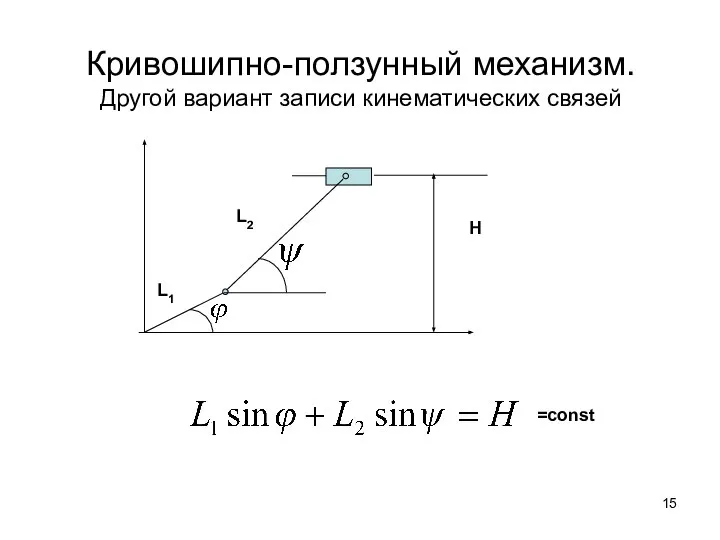
Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
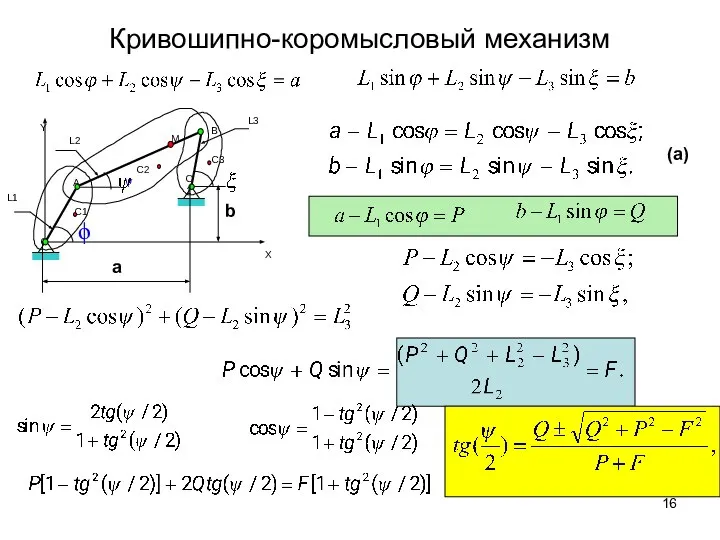
Кривошипно-коромысловый механизм
;
(a)
Кривошипно-коромысловый механизм
;
(a)
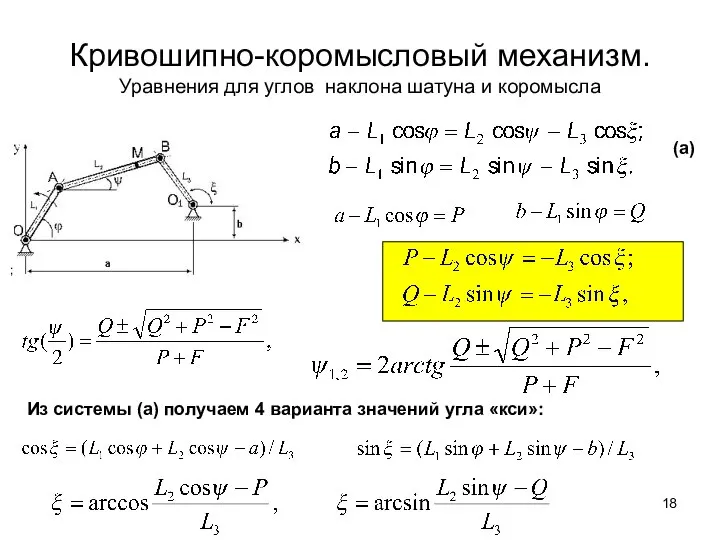
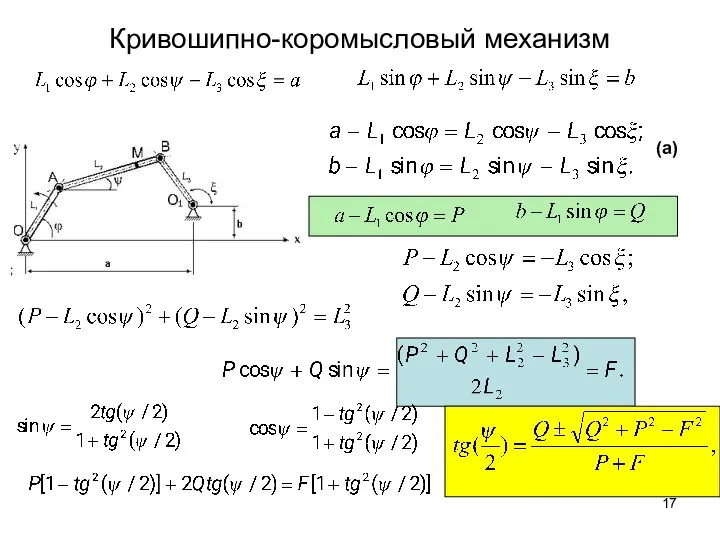
Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из
Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из
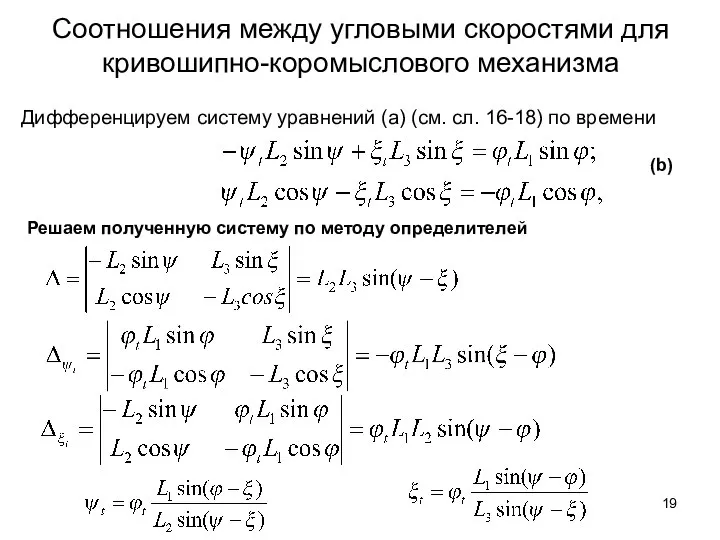
Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см.
Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см.
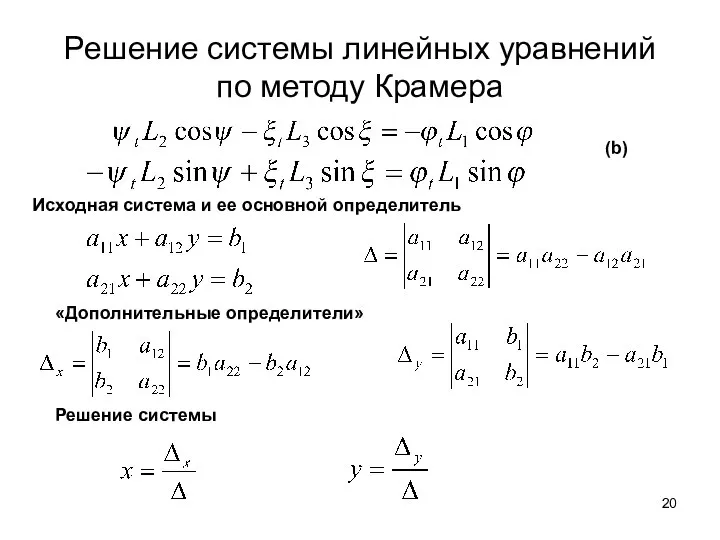
Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной
Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной
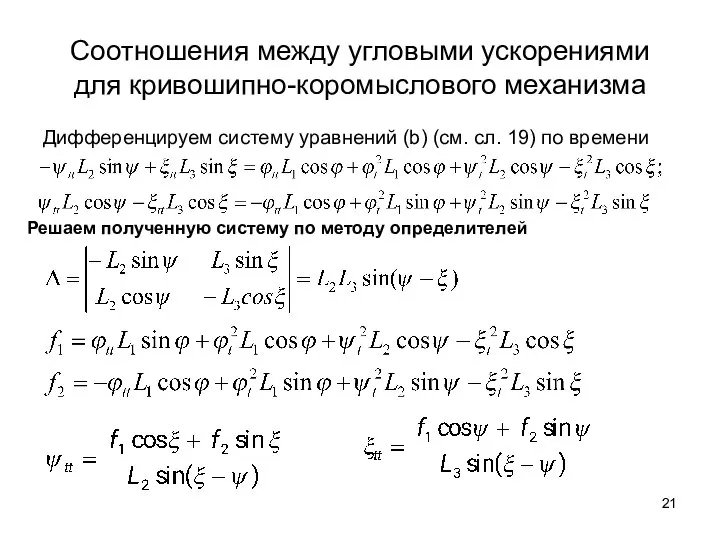
Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см.
Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см.
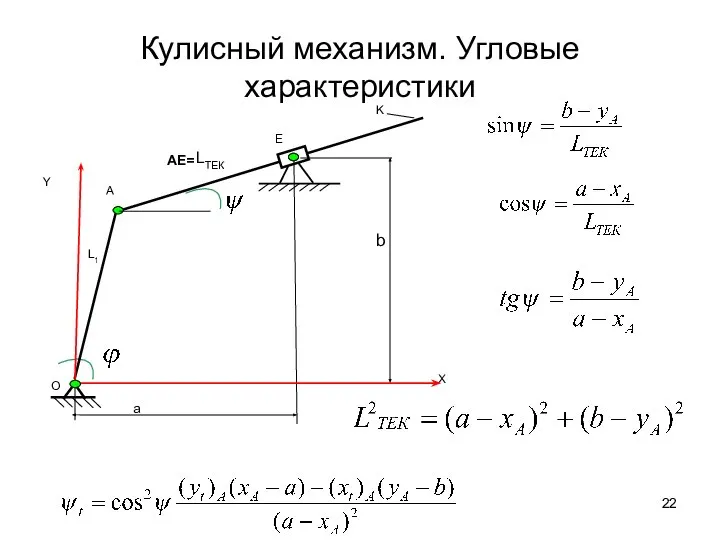
Кулисный механизм. Угловые характеристики
AE=
Кулисный механизм. Угловые характеристики
AE=

Кулисные механизмы.
Направляющая с неподвижной осью
Кулисные механизмы.
Направляющая с неподвижной осью
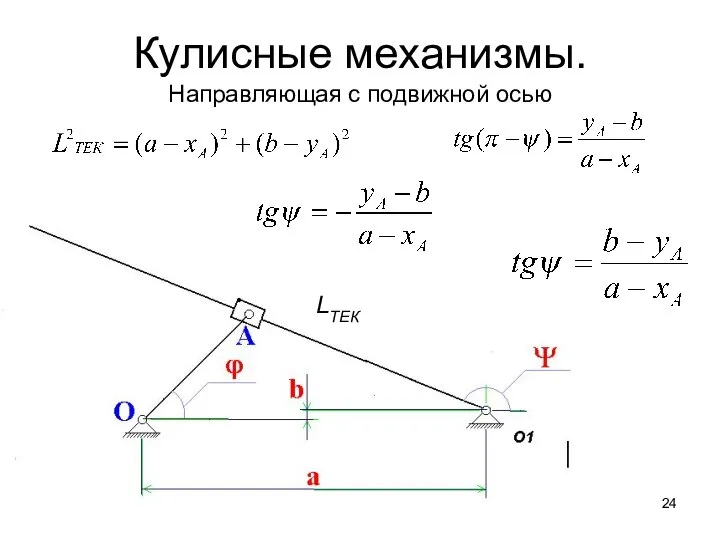
Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей
Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей
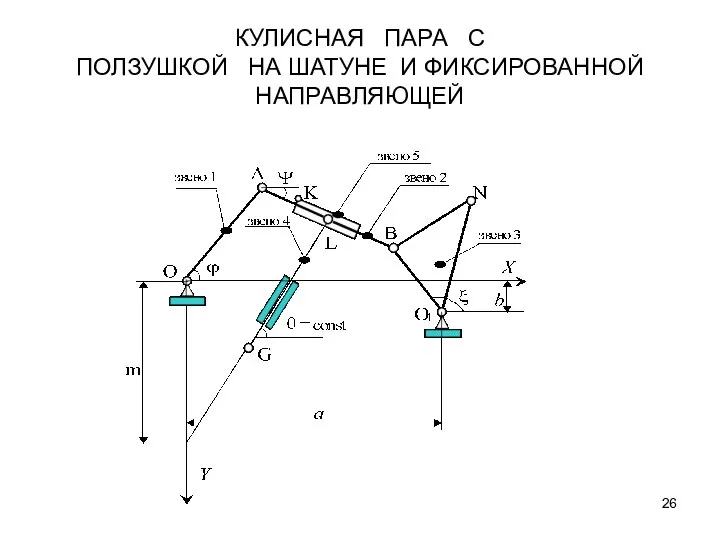
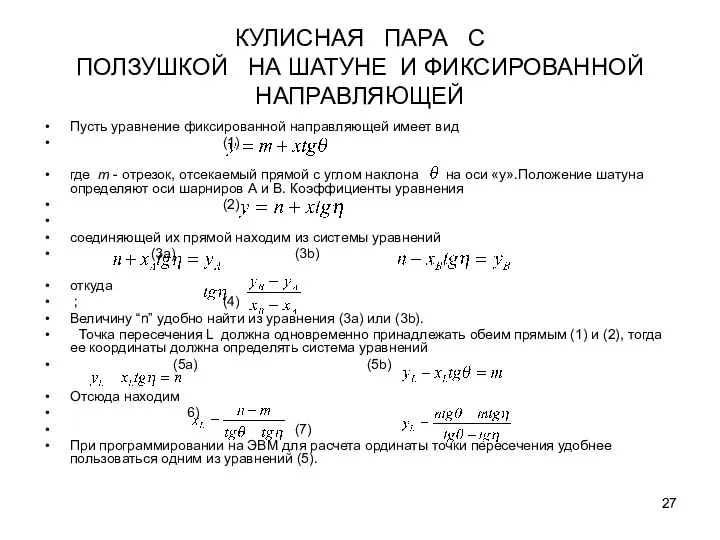
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Пусть уравнение фиксированной направляющей
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Пусть уравнение фиксированной направляющей
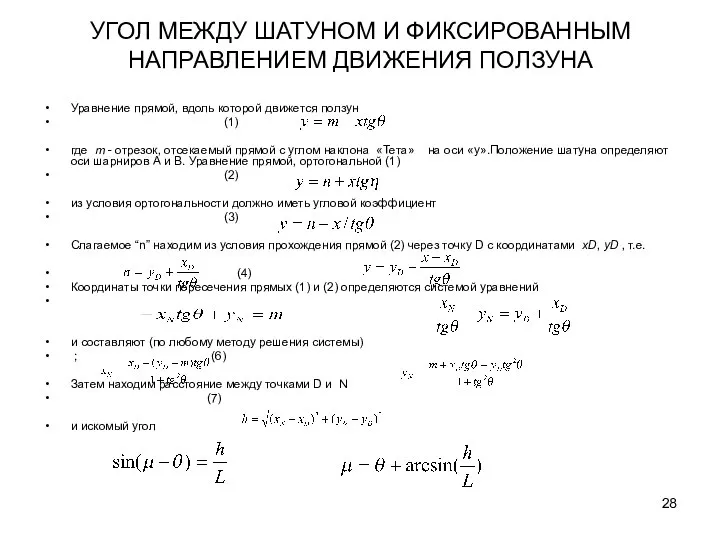
УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль
УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль
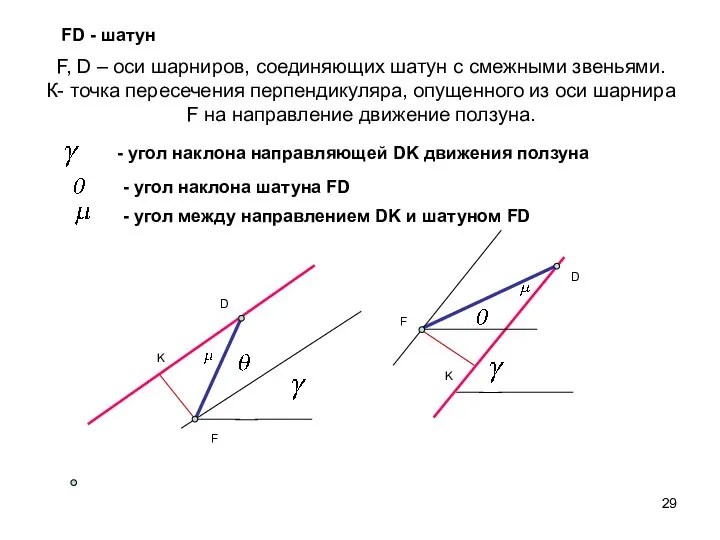
F, D – оси шарниров, соединяющих шатун с смежными звеньями.
К- точка
F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка
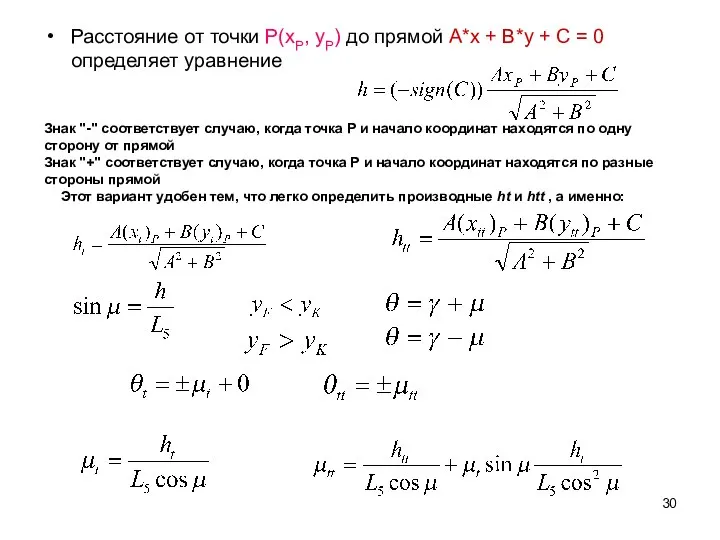
Расстояние от точки Р(хР, уР) до прямой А*х + В*у +
Расстояние от точки Р(хР, уР) до прямой А*х + В*у +
Два коромысла с кулисной парой
Два коромысла с кулисной парой
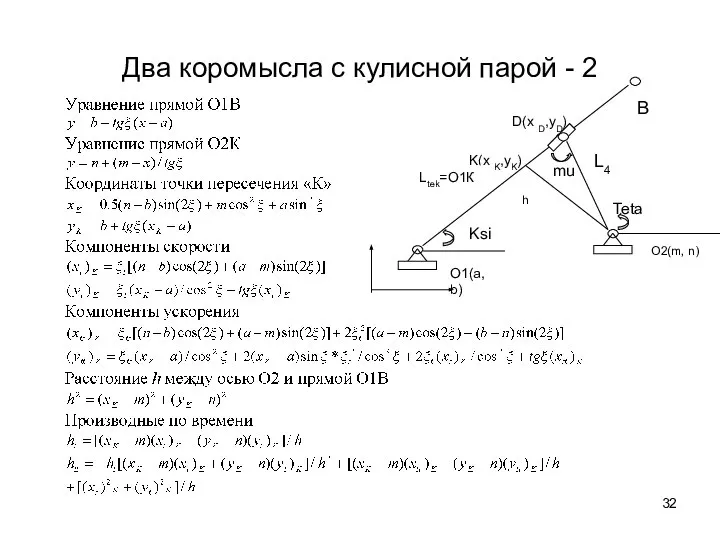
Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
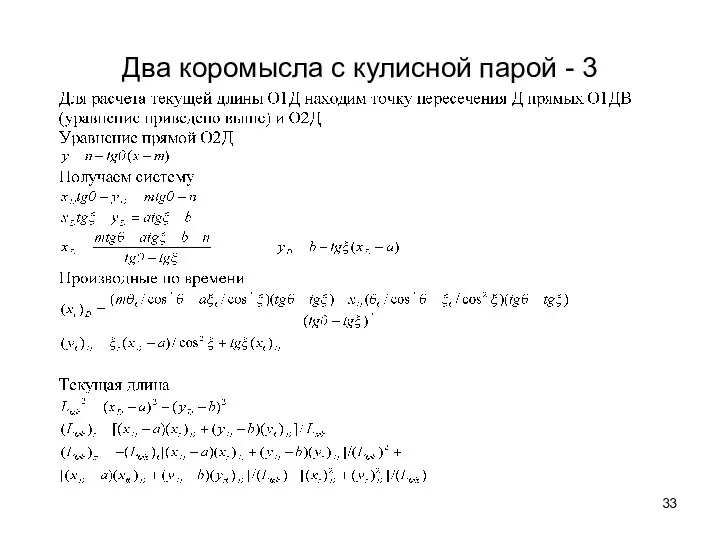
Два коромысла с кулисной парой - 3
Два коромысла с кулисной парой - 3
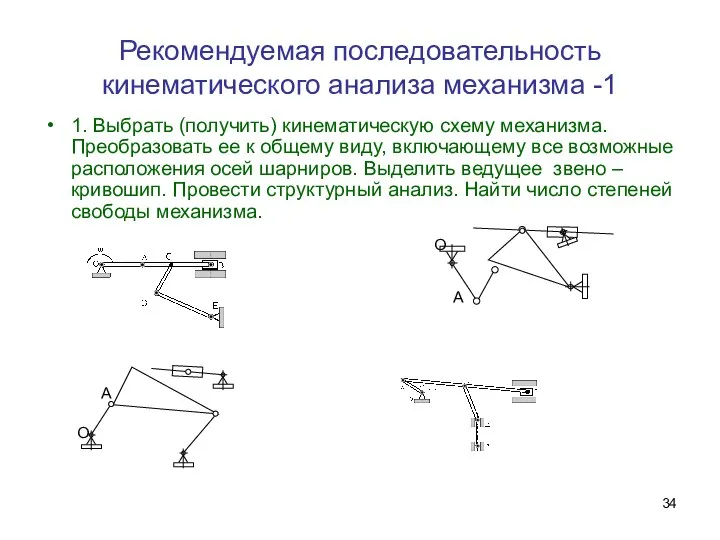
Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма.
Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма.
Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат,
Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат,
Рекомендуемая последовательность кинематического
анализа механизма-3
3. Для выбора допустимых соотношений расстояний между
осями
Рекомендуемая последовательность кинематического
анализа механизма-3
3. Для выбора допустимых соотношений расстояний между
осями
Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник
Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник
Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или
Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или
Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей
Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей
Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи,
Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи,
Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические
Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические

Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик
Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик
Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы
Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы
 Политическая культура. Генеалогия и интеллектуальная история концепта «политическая культура»
Политическая культура. Генеалогия и интеллектуальная история концепта «политическая культура» Ремёсла и украшения древнейших людей
Ремёсла и украшения древнейших людей Исследовательский проект. Тема: «Прошлое, настоящее и будущее музыкального театра». Автор: Шиванов
Исследовательский проект. Тема: «Прошлое, настоящее и будущее музыкального театра». Автор: Шиванов Преддверно-улитковый орган. Орган слуха. Наружное, среднее и внутреннее ухо.
Преддверно-улитковый орган. Орган слуха. Наружное, среднее и внутреннее ухо. Стандартные функции конвертации языка CLIPS
Стандартные функции конвертации языка CLIPS Скалярное произведение векторов Векторное произведение векторов Смешанное произведение векторов
Скалярное произведение векторов Векторное произведение векторов Смешанное произведение векторов Эволюция иммунной системы
Эволюция иммунной системы Балерина Евтеева Елена Викторовна
Балерина Евтеева Елена Викторовна Другорядні члени речення
Другорядні члени речення Растворы. Термодинамика процесса растворения. Способы выражения концентрации растворов.
Растворы. Термодинамика процесса растворения. Способы выражения концентрации растворов.  Заключение и прекращение брака
Заключение и прекращение брака ВКР «Оптические стекла в системе La2O3-Nb2O5-B2O3 с высоким показателем преломления»
ВКР «Оптические стекла в системе La2O3-Nb2O5-B2O3 с высоким показателем преломления» Аренда. Договор аренды. Лизинг и его виды
Аренда. Договор аренды. Лизинг и его виды Обереги в традициях русского народа
Обереги в традициях русского народа Автоматизированные информационные технологии управления персоналом — это совокупность методов и программно-технических средст
Автоматизированные информационные технологии управления персоналом — это совокупность методов и программно-технических средст Цели международно-политической экспертизы
Цели международно-политической экспертизы Презентация Рекреационные ресурсы мира
Презентация Рекреационные ресурсы мира  Позиционирование товара… …или каков товар в глазах покупателей
Позиционирование товара… …или каков товар в глазах покупателей АНДРЕЙ РУБЛЕВ
АНДРЕЙ РУБЛЕВ Розыгрыши на пилоне
Розыгрыши на пилоне Коррекция и развитие двигательной сферы подростков с тяжелыми нарушениями интеллектуального развития
Коррекция и развитие двигательной сферы подростков с тяжелыми нарушениями интеллектуального развития Таблица Менделеева
Таблица Менделеева  Биотические факторы среды, происхождение жизни
Биотические факторы среды, происхождение жизни Производственная система. Лекция 2
Производственная система. Лекция 2 Презентация «РАСЧЕТЫ»
Презентация «РАСЧЕТЫ» Элементы ландшафтной архитектуры
Элементы ландшафтной архитектуры Презентация "10 этапов процесса продаж" - скачать презентации по Экономике
Презентация "10 этапов процесса продаж" - скачать презентации по Экономике БЖД Лекция (ЧС)
БЖД Лекция (ЧС)