- Методы повышения точности средств измерений

Содержание
- 2. Лекция 11 Методы повышения точности средств измерений
- 3. Методы повышения точности средств измерений конструктивно-технологические, структурные, алгоритмические, инвариантные, комплексные. Конструктивно-технологические методы основаны на повышении качества
- 4. Структурные методы Основная идея структурных методов повышения точности состоит в том, чтобы из неточных элементов путем
- 5. Схемы температурной компенсации а) б) R1=const
- 6. Схема компенсации сопротивлением с обратным температурным коэффициентом
- 7. Компенсация температуры холодного спая
- 8. Схема автоматического введения поправки на температуру
- 9. Методы уравновешивающего преобразования Измеряемая величина х преобразуется с помощью первичного преобразователя ПП в величину Fx ,
- 10. S=αK=K/(1+ βK) Чувствительность измерительной цепи уравновешивания Отсюда следует, что чувствительность цепи уравновешивания в 1+ βK раз
- 11. В приборах уравновешивающего преобразования, для которых связь выхода с входом дается уравнением погрешность прибора Δ y
- 12. Инвариантные методы Инвариантные методы сводятся к выбору точных связей, при которых система не реагирует на внешние
- 13. схема защиты прибора от возмущений, которые пропускаются через фильтры Ф1 Ф2, Ф3. Здесь под фильтрами следует
- 14. Реализация принципа инвариантности путем создания в схеме прибора компенсирующих сигналов, противоположных по знаку погрешностям. С поступлением
- 15. Схема прибора прямого преобразования, с двумя одинаковых канала S1 и S2 через один из которых проходит
- 19. Алгоритмические методы Алгоритмические методы повышения точности сводятся к рациональной обработке сигналов с целью исключения погрешностей. Наибольшее
- 20. Метод эталонных сигналов k1, k2, k4 k1, k3 k2, k4 k2, k3, k5
- 21. Метод инвертирования широко используется для устранения ряда постоянных и медленно изменяющихся систематических погрешностей. Этот метод и
- 22. Комплексные методы повышения точности Основаны на сочетании структурных и алгоритмических методов, используют информацию об одних и
- 23. Схема комплексирования
- 25. Скачать презентацию
Лекция 11
Методы повышения точности средств измерений
Лекция 11
Методы повышения точности средств измерений
Методы повышения точности средств измерений
конструктивно-технологические,
структурные,
алгоритмические,
инвариантные,
комплексные.
Конструктивно-технологические методы
Методы повышения точности средств измерений
конструктивно-технологические,
структурные,
алгоритмические,
инвариантные,
комплексные.
Конструктивно-технологические методы
Структурные методы
Основная идея структурных методов повышения точности состоит в том, чтобы
Структурные методы
Основная идея структурных методов повышения точности состоит в том, чтобы
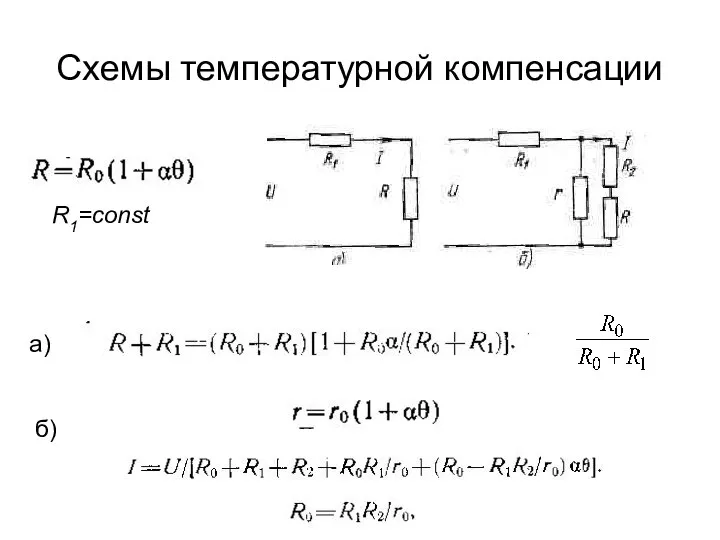
Схемы температурной компенсации
а)
б)
R1=const
Схемы температурной компенсации
а)
б)
R1=const
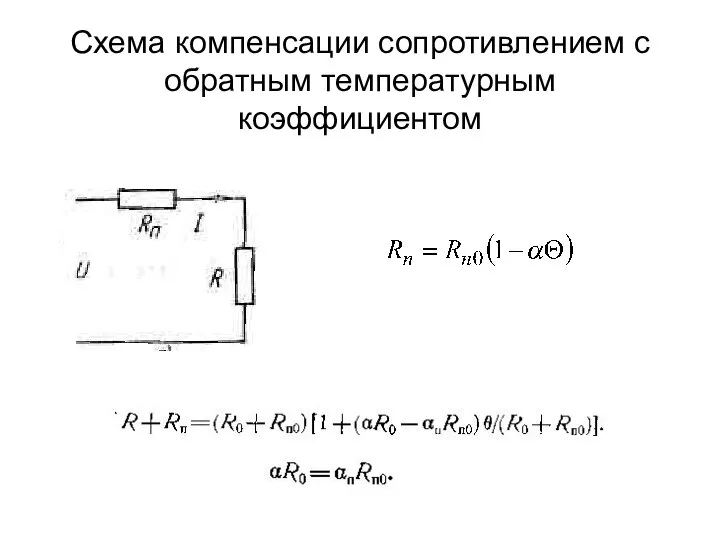
Схема компенсации сопротивлением с обратным температурным коэффициентом
Схема компенсации сопротивлением с обратным температурным коэффициентом
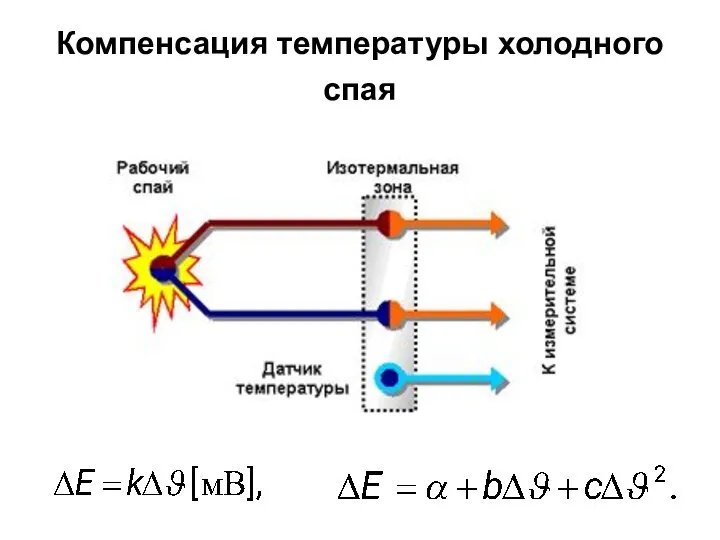
Компенсация температуры холодного спая
Компенсация температуры холодного спая

Схема автоматического введения поправки на температуру
Схема автоматического введения поправки на температуру
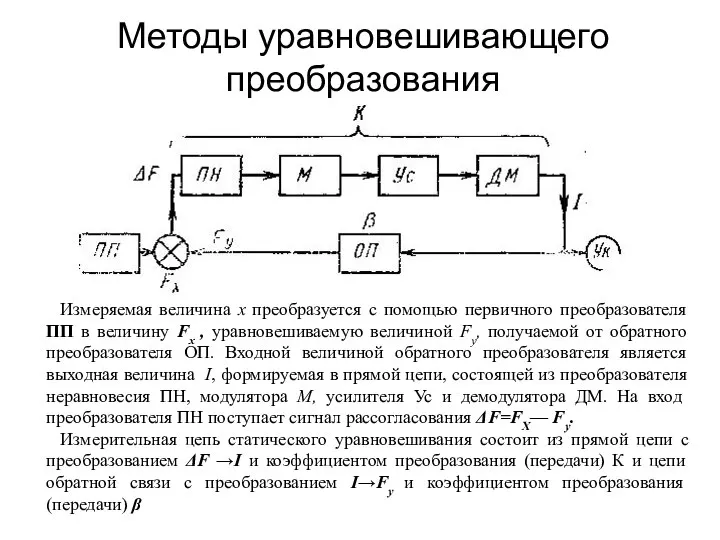
Методы уравновешивающего преобразования
Измеряемая величина х преобразуется с помощью первичного преобразователя ПП
Методы уравновешивающего преобразования
Измеряемая величина х преобразуется с помощью первичного преобразователя ПП
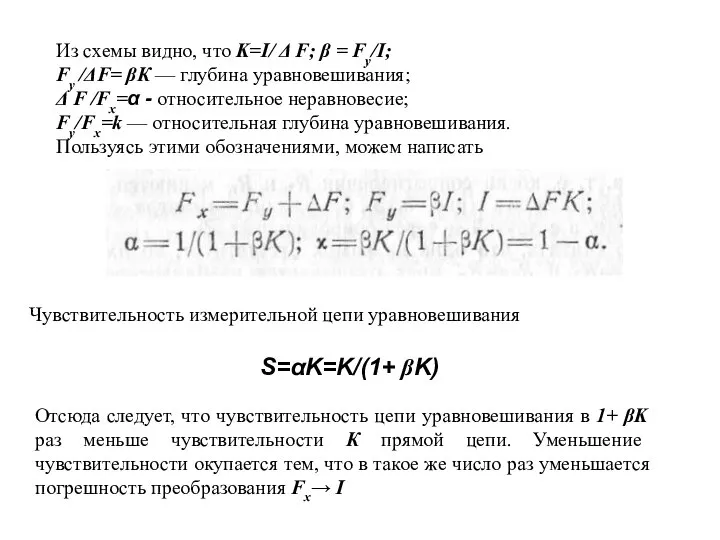
S=αK=K/(1+ βK)
Чувствительность измерительной цепи уравновешивания
Отсюда следует, что чувствительность цепи уравновешивания
S=αK=K/(1+ βK)
Чувствительность измерительной цепи уравновешивания
Отсюда следует, что чувствительность цепи уравновешивания
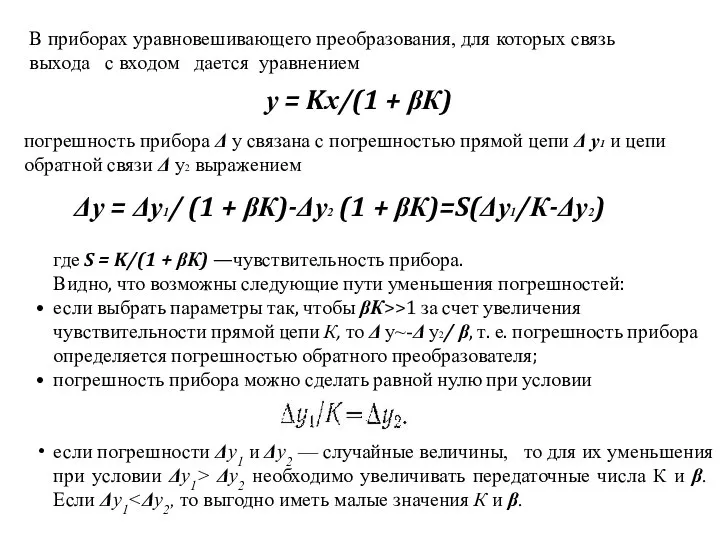
В приборах уравновешивающего преобразования, для которых связь выхода с входом дается
В приборах уравновешивающего преобразования, для которых связь выхода с входом дается
Инвариантные методы
Инвариантные методы сводятся к выбору точных связей, при которых система
Инвариантные методы
Инвариантные методы сводятся к выбору точных связей, при которых система
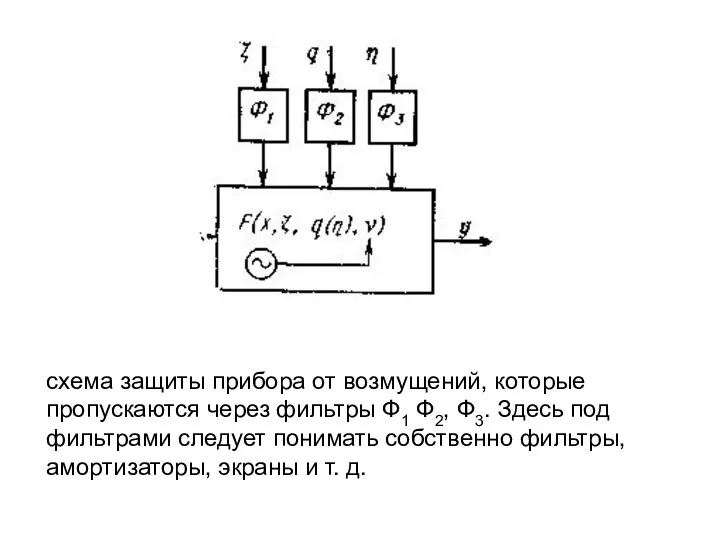
схема защиты прибора от возмущений, которые пропускаются через фильтры Ф1 Ф2,
схема защиты прибора от возмущений, которые пропускаются через фильтры Ф1 Ф2,
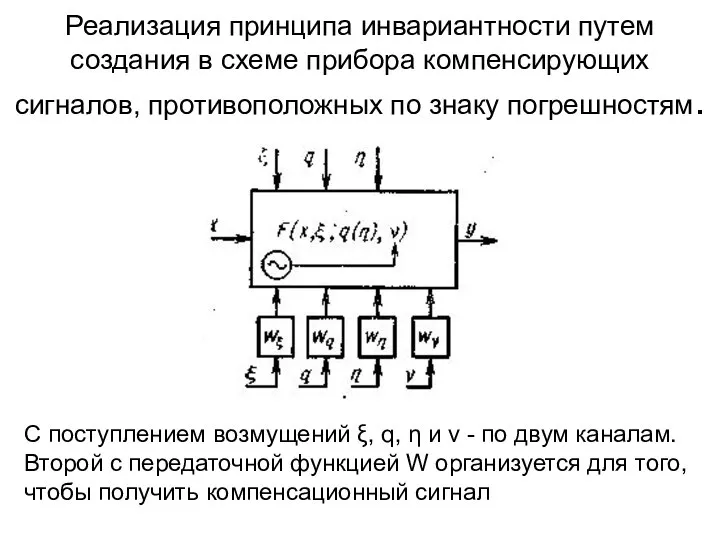
Реализация принципа инвариантности путем создания в схеме прибора компенсирующих сигналов, противоположных
Реализация принципа инвариантности путем создания в схеме прибора компенсирующих сигналов, противоположных
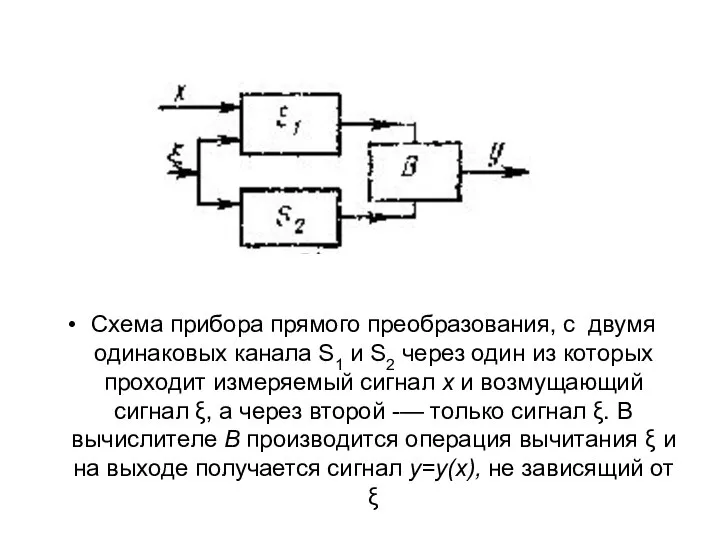
Схема прибора прямого преобразования, с двумя одинаковых канала S1 и S2
Схема прибора прямого преобразования, с двумя одинаковых канала S1 и S2



Алгоритмические методы
Алгоритмические методы повышения точности сводятся к рациональной обработке сигналов с
Алгоритмические методы
Алгоритмические методы повышения точности сводятся к рациональной обработке сигналов с
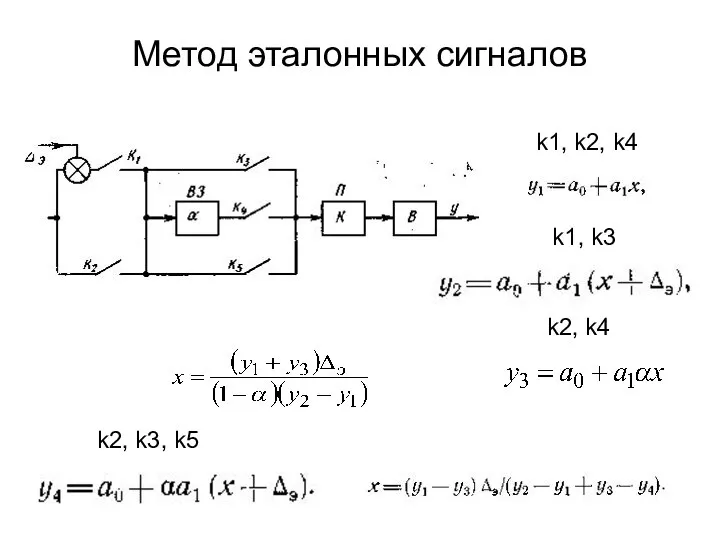
Метод эталонных сигналов
k1, k2, k4
k1, k3
k2, k4
k2, k3, k5
Метод эталонных сигналов
k1, k2, k4
k1, k3
k2, k4
k2, k3, k5
Метод инвертирования широко используется для устранения ряда постоянных и медленно изменяющихся
Метод инвертирования широко используется для устранения ряда постоянных и медленно изменяющихся
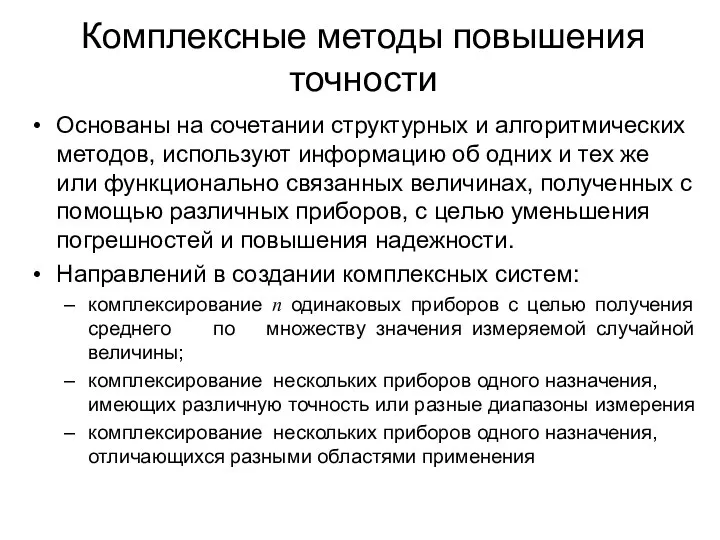
Комплексные методы повышения точности
Основаны на сочетании структурных и алгоритмических методов, используют
Комплексные методы повышения точности
Основаны на сочетании структурных и алгоритмических методов, используют
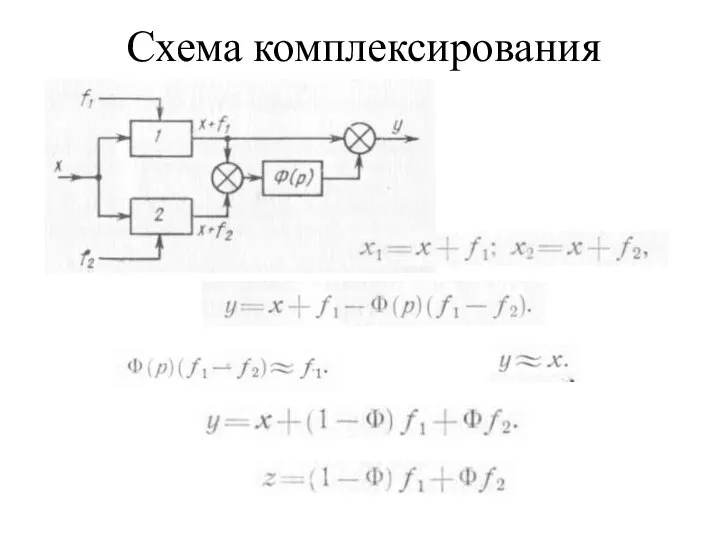
Схема комплексирования
Схема комплексирования
 Исламский фундаментализм
Исламский фундаментализм Правоотношения детей и родителей
Правоотношения детей и родителей Репка. Найди 10 отличий - презентация для начальной школы
Репка. Найди 10 отличий - презентация для начальной школы Исаакиевский собор
Исаакиевский собор  DC sweep Parameter sweep Temperature sweep. Виды автоматического анализа в Multisim
DC sweep Parameter sweep Temperature sweep. Виды автоматического анализа в Multisim Suomen kielen kahdeskymmenesneljäs 24. Oppitunti. Verbit. Глаголы
Suomen kielen kahdeskymmenesneljäs 24. Oppitunti. Verbit. Глаголы 11 класс. Повторение
11 класс. Повторение Блок. «Золотое правило» механики для блока
Блок. «Золотое правило» механики для блока ВЕРИФИКАЦИЯ ПРОГРАММ ДВС
ВЕРИФИКАЦИЯ ПРОГРАММ ДВС Тема 4: Риски в предпринимательской сфере. План: 1.Сущность предпринимательского риска. 2.Классификация предпринимательских риско
Тема 4: Риски в предпринимательской сфере. План: 1.Сущность предпринимательского риска. 2.Классификация предпринимательских риско Правила дорожные знать всем положено Чернева Любовь Иннокентьевна МДОУ детский сад №31
Правила дорожные знать всем положено Чернева Любовь Иннокентьевна МДОУ детский сад №31  Лев Николаевич Толстой. Творчество писателя
Лев Николаевич Толстой. Творчество писателя Презентация на тему "Ожирение" - скачать презентации по Медицине
Презентация на тему "Ожирение" - скачать презентации по Медицине Классификация схем трещин каменного здания. Причины их возникновения. Методы измерения ширины и контроля трещин кладки
Классификация схем трещин каменного здания. Причины их возникновения. Методы измерения ширины и контроля трещин кладки Василиса Премудрая - презентация для начальной школы
Василиса Премудрая - презентация для начальной школы Логические значения. Ветвление (Delphi)
Логические значения. Ветвление (Delphi) Развитие культуры в русских землях во второй половине 13-14 в
Развитие культуры в русских землях во второй половине 13-14 в Презентация Оборотные средства, их состав, классификация, оборачиваемость Оборотные средства, их состав, классификация, оборачив
Презентация Оборотные средства, их состав, классификация, оборачиваемость Оборотные средства, их состав, классификация, оборачив Автошкола Драйв. Новые филиалы
Автошкола Драйв. Новые филиалы Схемы замещения источников электрической энергии
Схемы замещения источников электрической энергии Компоненты отношения власти. Субъект и объект власти
Компоненты отношения власти. Субъект и объект власти Генерация (псевдо) случайных чисел в языке СИ
Генерация (псевдо) случайных чисел в языке СИ Паттерн Builder (строитель)
Паттерн Builder (строитель) Методология системного анализа. Понятие системы
Методология системного анализа. Понятие системы Процедуры и функции. Заголовок и тело процедур и функций, классификация параметров. Вызов процедур и функций
Процедуры и функции. Заголовок и тело процедур и функций, классификация параметров. Вызов процедур и функций Культура России в конце XIX – начале XX века
Культура России в конце XIX – начале XX века Международно-правовые основания криминализации деяний, связанных с посягательством на культурные ценности
Международно-правовые основания криминализации деяний, связанных с посягательством на культурные ценности STP Overview STP
STP Overview STP