Мысленное моделирование и информационные процессы в инженерной работе. Обзор общих понятий и представлений
- Мысленное моделирование и информационные процессы в инженерной работе. Обзор общих понятий и представлений

Содержание
- 2. ИНФОРМАТИКА ДЛЯ ИНЖЕНЕРА
- 3. МОДЕЛИ НЕПРЕРЫВНЫХ ПРОЦЕССОВ И СПЛОШНЫХ СРЕД – ОСНОВНАЯ ОБЛАСТЬ ДЕЯТЕЛЬНОСТИ ИНЖЕНЕРА Предварительное замечание МАТЕМАТИЧЕСКИЙ АНАЛИЗ –
- 4. МЕХАНИКА СПЛОШНЫХ СРЕД 1. ГЕОМЕТРИЧЕСКИЕ ПОНЯТИЯ – ПЕРЕМЕЩЕНИЯ И ДЕФОРМАЦИИ
- 5. ОБРАЗЫ К ОБЪЕМУ ПОНЯТИЯ «ДЕФОРМАЦИЯ»
- 6. СТАТИЧЕСКИЕ ПОНЯТИЯ – СИЛЫ И ИХ ДЕЙСТВИЕ НА ТЕЛА
- 7. ЕЩЕ РАЗ О РАВНОВЕСИИ. ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
- 8. Внутренние силы в трехмерном пространстве Но они же всегда в трехмерном пространстве ! ? В трехмерном
- 9. Физические понятия (упругость, пластичность и др.) Для изотропного упругого материала εx = E(σx–μσy–μσz), εy = E(σy–μσz–μσx),
- 10. Все три стороны задачи (и соответствующие группы уравнений) взаимосвязаны. Обычно нельзя найти отдельно силы из статических
- 11. Особенности моделирования (т.е. механики) жидкостей и газов
- 13. ПРОСТЕЙШАЯ МОДЕЛЬ ДЕФОРМИРОВАНИЯ ТВЕРДОГО ТЕЛА: БАЛКА – СТЕНКА, РАВНОВЕСИЕ И ДВИЖЕНИЕ
- 17. Поколения ЭВМ
- 18. ЛЕКЦИЯ 2. Мысленное математическое моделирование простейшего непрерывного процесса – движения «сосредоточенных масс» В чем простота? –
- 19. Дифференцирование процесса движения – разделение на достаточно малые части dt с линейным приближением на каждой части
- 24. Скачать презентацию
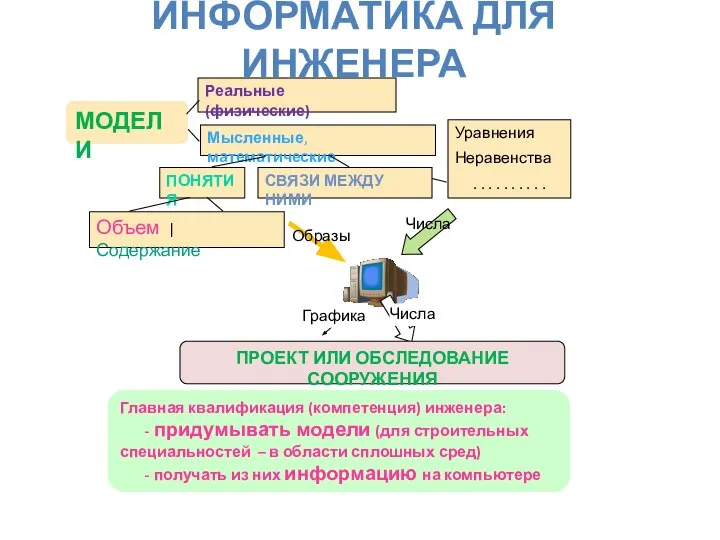
ИНФОРМАТИКА ДЛЯ ИНЖЕНЕРА
ИНФОРМАТИКА ДЛЯ ИНЖЕНЕРА

МОДЕЛИ НЕПРЕРЫВНЫХ ПРОЦЕССОВ И СПЛОШНЫХ СРЕД –
ОСНОВНАЯ ОБЛАСТЬ ДЕЯТЕЛЬНОСТИ ИНЖЕНЕРА
Предварительное
МОДЕЛИ НЕПРЕРЫВНЫХ ПРОЦЕССОВ И СПЛОШНЫХ СРЕД –
ОСНОВНАЯ ОБЛАСТЬ ДЕЯТЕЛЬНОСТИ ИНЖЕНЕРА
Предварительное
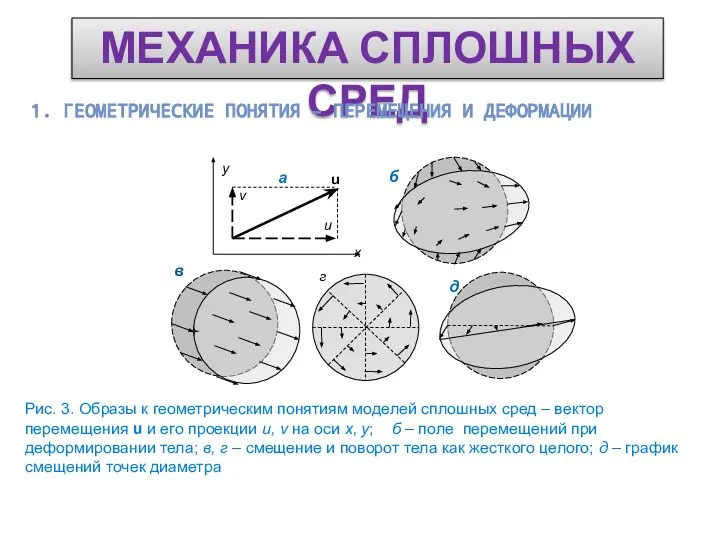
МЕХАНИКА СПЛОШНЫХ СРЕД
1. ГЕОМЕТРИЧЕСКИЕ ПОНЯТИЯ – ПЕРЕМЕЩЕНИЯ И ДЕФОРМАЦИИ
МЕХАНИКА СПЛОШНЫХ СРЕД
1. ГЕОМЕТРИЧЕСКИЕ ПОНЯТИЯ – ПЕРЕМЕЩЕНИЯ И ДЕФОРМАЦИИ
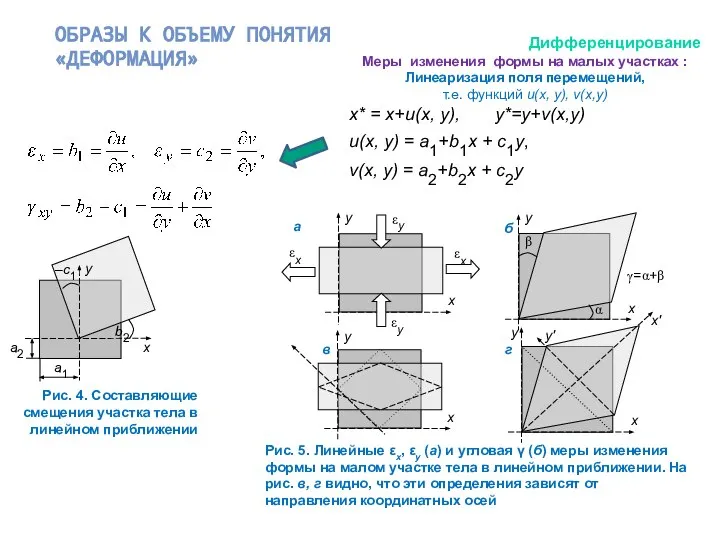
ОБРАЗЫ К ОБЪЕМУ ПОНЯТИЯ «ДЕФОРМАЦИЯ»
ОБРАЗЫ К ОБЪЕМУ ПОНЯТИЯ «ДЕФОРМАЦИЯ»

СТАТИЧЕСКИЕ ПОНЯТИЯ – СИЛЫ И ИХ ДЕЙСТВИЕ НА ТЕЛА
СТАТИЧЕСКИЕ ПОНЯТИЯ – СИЛЫ И ИХ ДЕЙСТВИЕ НА ТЕЛА
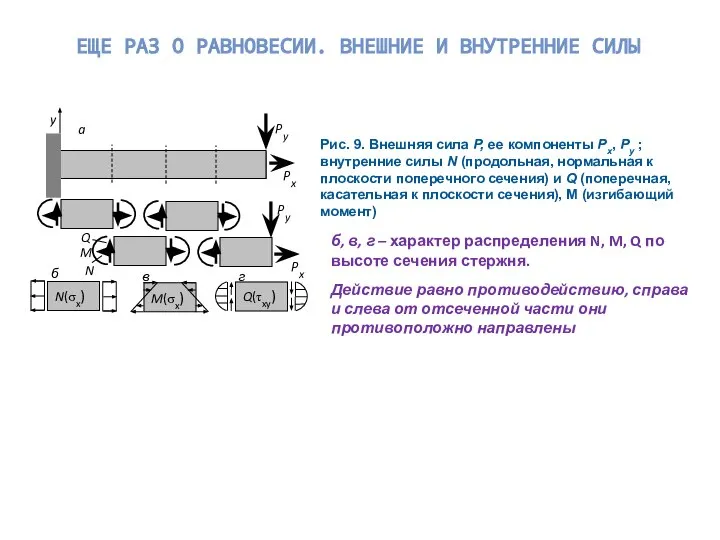
ЕЩЕ РАЗ О РАВНОВЕСИИ. ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
ЕЩЕ РАЗ О РАВНОВЕСИИ. ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
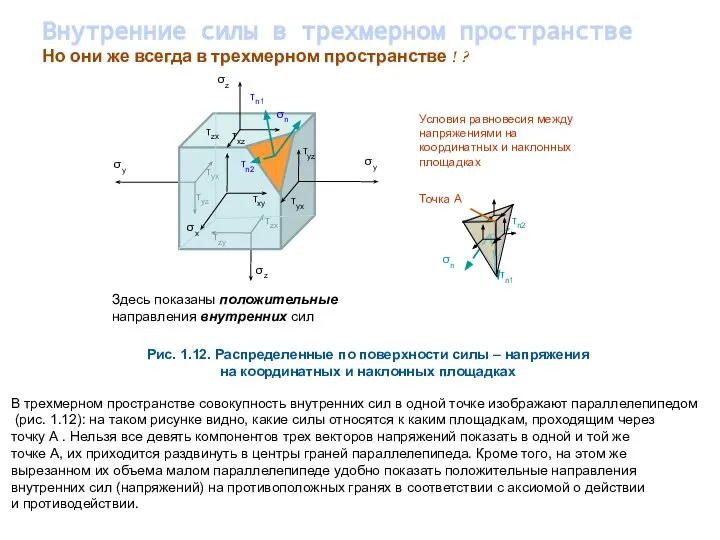
Внутренние силы в трехмерном пространстве
Но они же всегда в трехмерном пространстве
Внутренние силы в трехмерном пространстве
Но они же всегда в трехмерном пространстве

Физические понятия (упругость, пластичность и др.)
Для изотропного упругого материала εx =
Физические понятия (упругость, пластичность и др.)
Для изотропного упругого материала εx =
Все три стороны задачи (и соответствующие группы уравнений) взаимосвязаны.
Обычно нельзя
Все три стороны задачи (и соответствующие группы уравнений) взаимосвязаны.
Обычно нельзя
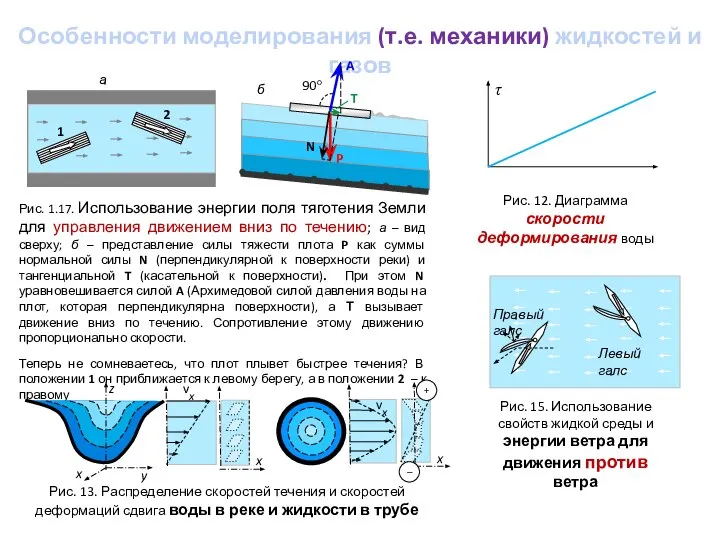
Особенности моделирования (т.е. механики) жидкостей и газов
Особенности моделирования (т.е. механики) жидкостей и газов

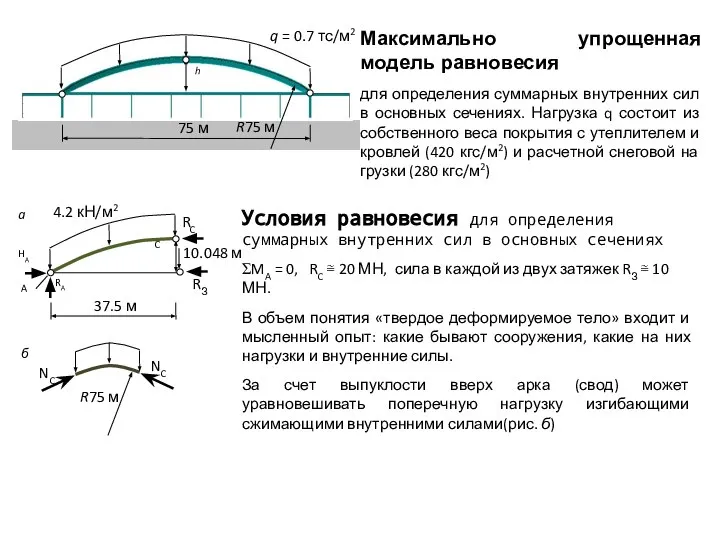
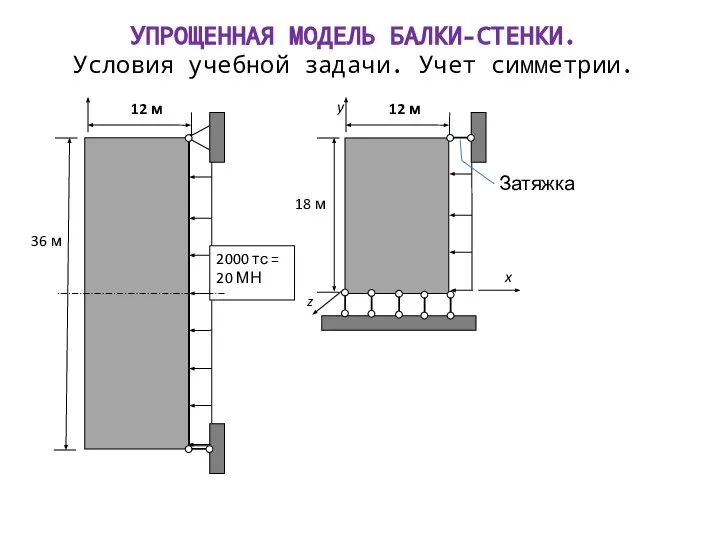
ПРОСТЕЙШАЯ МОДЕЛЬ ДЕФОРМИРОВАНИЯ ТВЕРДОГО ТЕЛА:
БАЛКА – СТЕНКА, РАВНОВЕСИЕ И ДВИЖЕНИЕ
ПРОСТЕЙШАЯ МОДЕЛЬ ДЕФОРМИРОВАНИЯ ТВЕРДОГО ТЕЛА:
БАЛКА – СТЕНКА, РАВНОВЕСИЕ И ДВИЖЕНИЕ
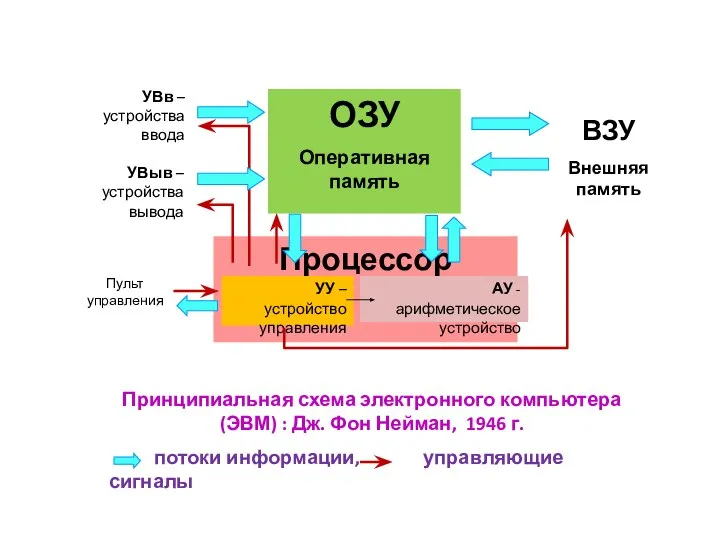

Поколения ЭВМ
Поколения ЭВМ
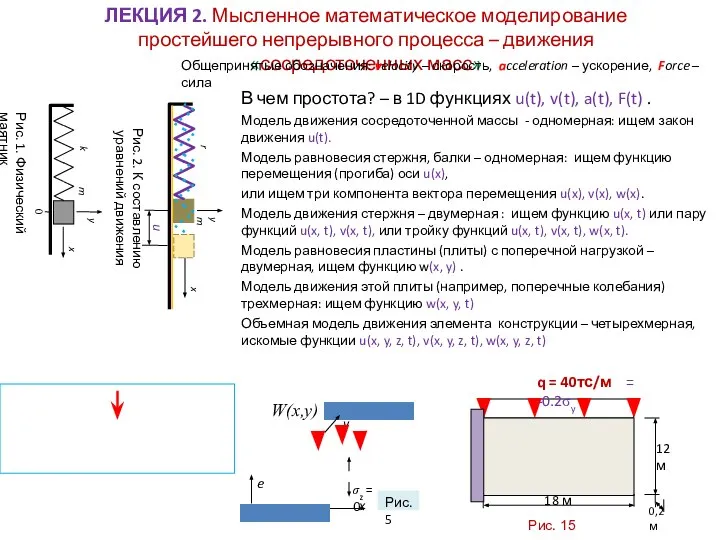
ЛЕКЦИЯ 2. Мысленное математическое моделирование простейшего непрерывного процесса – движения «сосредоточенных
ЛЕКЦИЯ 2. Мысленное математическое моделирование простейшего непрерывного процесса – движения «сосредоточенных
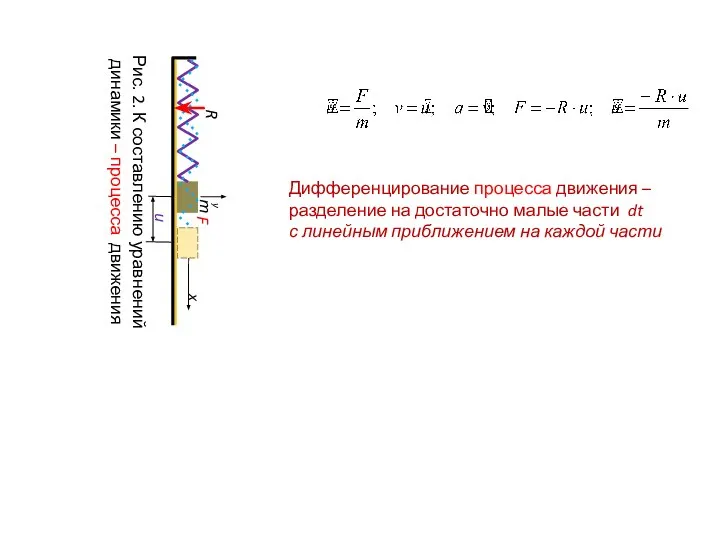
Дифференцирование процесса движения – разделение на достаточно малые части dt
с линейным
Дифференцирование процесса движения – разделение на достаточно малые части dt
с линейным
 Управление проектами. Лекция 2
Управление проектами. Лекция 2 Концепция стратегического управления Arthur d.little. Модель ADL/LC Дисциплина: Международный маркетинг
Концепция стратегического управления Arthur d.little. Модель ADL/LC Дисциплина: Международный маркетинг  Полное построение алгоритма. Часть 2. Задача коммивояжера
Полное построение алгоритма. Часть 2. Задача коммивояжера Элементарный состав
Элементарный состав Презентация "Особенности реализации проектов аутсорсинга в российских и зарубежных компаниях" - скачать презентации по Экон
Презентация "Особенности реализации проектов аутсорсинга в российских и зарубежных компаниях" - скачать презентации по Экон Основы радиоэлектроники
Основы радиоэлектроники Деление войск смешариков
Деление войск смешариков Поздравления к 8 Марта
Поздравления к 8 Марта Программа поездки в Казань
Программа поездки в Казань Святитель Николай. Слайдфильм
Святитель Николай. Слайдфильм Программирование на языке MATLAB. Программирование разветвляющих алгоритмов
Программирование на языке MATLAB. Программирование разветвляющих алгоритмов Классицизм (от латинского- «образцовый»)
Классицизм (от латинского- «образцовый») Генеалогическое древо
Генеалогическое древо Спорт, индивидуальный выбор спорта
Спорт, индивидуальный выбор спорта Внутрибольничная инфекция
Внутрибольничная инфекция Стихи Г Виеру - презентация для начальной школы
Стихи Г Виеру - презентация для начальной школы Політичний конфлікт як предмет дослідження геоконфліктології
Політичний конфлікт як предмет дослідження геоконфліктології Разряды прилагательных
Разряды прилагательных Презентация Задача по контрактам
Презентация Задача по контрактам АРХИТЕКТУРА Архитектура г. Омска Приложение к хрестоматии «Музыка, театр, изобразительное искусство Омского Прииртышья»
АРХИТЕКТУРА Архитектура г. Омска Приложение к хрестоматии «Музыка, театр, изобразительное искусство Омского Прииртышья» Контактная задача
Контактная задача Презентация на тему "Профілактика синдрому емоційного вигорання" - скачать презентации по Педагогике
Презентация на тему "Профілактика синдрому емоційного вигорання" - скачать презентации по Педагогике Презентация на тему "Моя профессия - фармацевт" - скачать презентации по Педагогике
Презентация на тему "Моя профессия - фармацевт" - скачать презентации по Педагогике High School Cheerleaders. Комплексная школа черлидеров
High School Cheerleaders. Комплексная школа черлидеров Найти памятники архитектуры XVIII-XIX вв. Найти памятники архитектуры XVIII-XIX вв.
Найти памятники архитектуры XVIII-XIX вв. Найти памятники архитектуры XVIII-XIX вв. Разработка отдельных фаз компиляции для заданного входного языка
Разработка отдельных фаз компиляции для заданного входного языка Презентация на тему "Мышцы" - скачать презентации по Медицине
Презентация на тему "Мышцы" - скачать презентации по Медицине сент
сент